Optimal De- sign Combining Hydrodynamics Models and Neural Networks, Proceedings of 11th In- ternational Conference on Computer Applications and Information Technology in the Maritime Industries, Liege, Belgium, 2012 April 16-18, Venice (2011). [6] J.H. Holland, Adaptation in Nature and Artificial Systems, University of Michigan Press, Ann Arbor (1975). [7] R.E. Smith, E. Smuda, Adaptively Resizing Populations: Algorithm, Analysis, and First Results, Complex Systems, Vol. 9, No. 1, Complex Systems Publications, Inc. (1995), pp. 47-72. [8] D.E. Goldberg, Optimal Initial Population Size for Binary-Coded Genetic Algorithms, (TCGA Report No. 85001). University of Alabama, Tuscaloosa, Ala. : Clearinghouse for Genetic Algorithms, Dept. of Engineering Mechanics, Tuscaloosa (1985). [9] R.T. Hatfka, Z. Gurdal, Element of Structural Optimization, Kluwer Academic Pub- lishers, Dordrecht (1992). [10] G. Rudolph, Evolutionary Search Under Partially Ordered Sets, (Tech. Rep. CI- 67/99) Univ. Dortmund, Dept. Comput. Sci./LS11, Dortmund (1999). [11] E. Zitzler, K. Deb, L. Thiele, Comparison of Multiobjective Evolutionary Algorithms: Empirical Results, Evol. Comput., Vol. 8, No. 2, PubMed (2000), pp. 173-195. [12] D.P. Raymer, Enhancing Aircraft Conceptual Design Using Multidisciplinary Opti- mization, PhD Thesis, Royal Institute of Technology, Stockholm (2002). 16
{kind=link}
{kind=link}
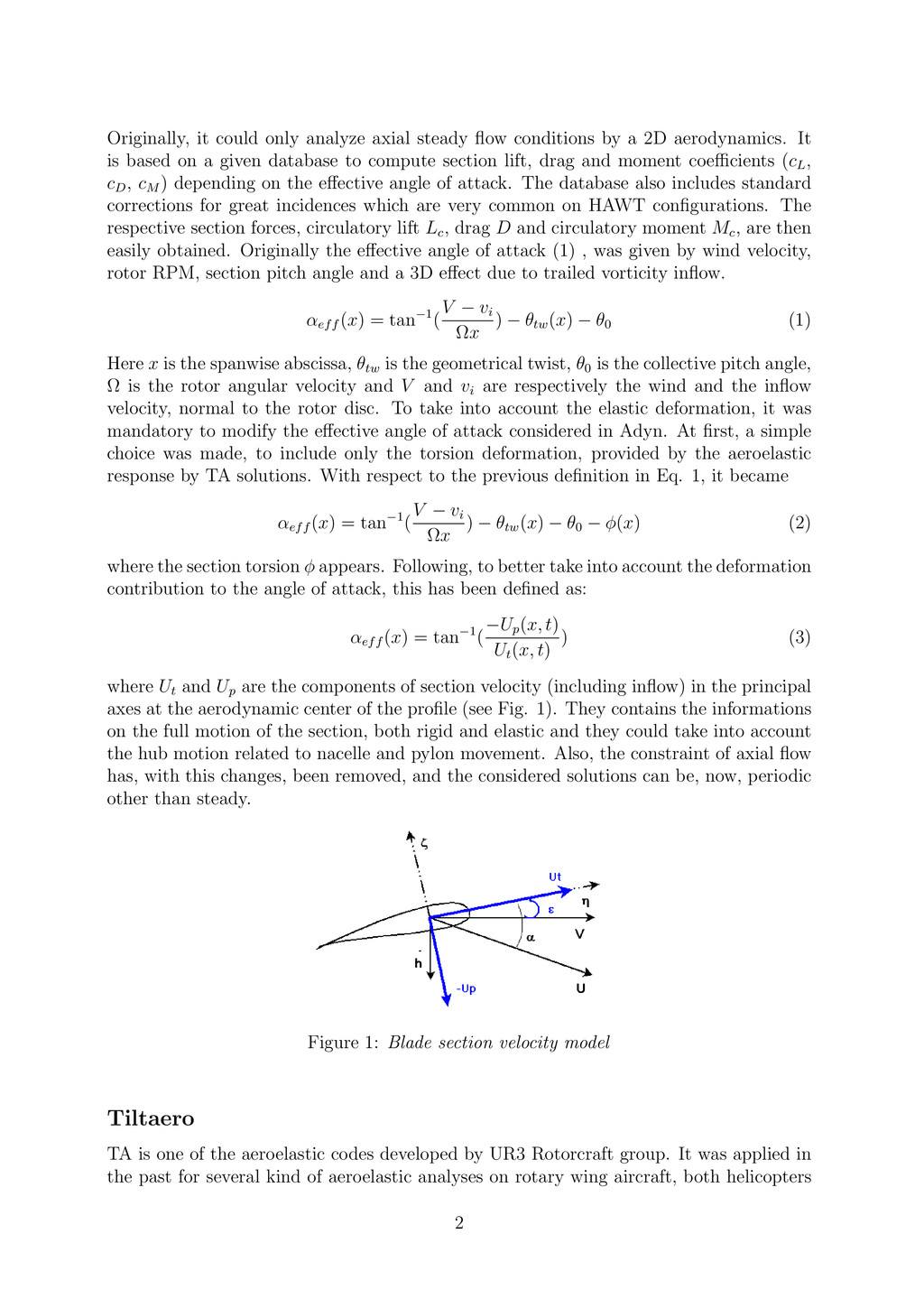
![and tiltrotors. For an accurate description Refs. [2]-[3] are recommended.](https://files.speakerdeck.com/presentations/bf4bb69074450130f6b5123138154c45/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[5] D. Calcagni, G. Bernardini, F. Salvatore, Automated Marine Propeller](https://files.speakerdeck.com/presentations/bf4bb69074450130f6b5123138154c45/slide_15.jpg){kind=link}