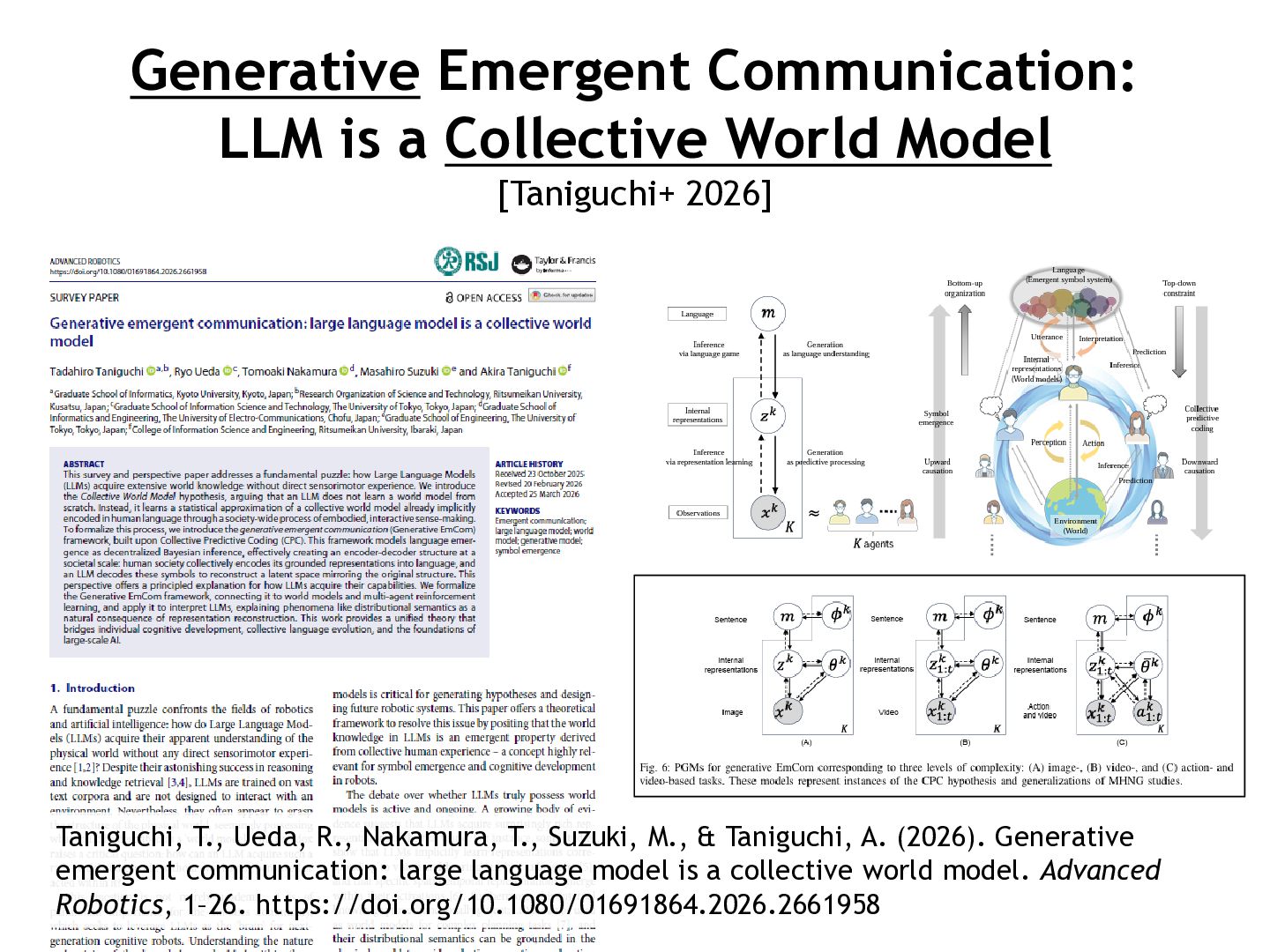
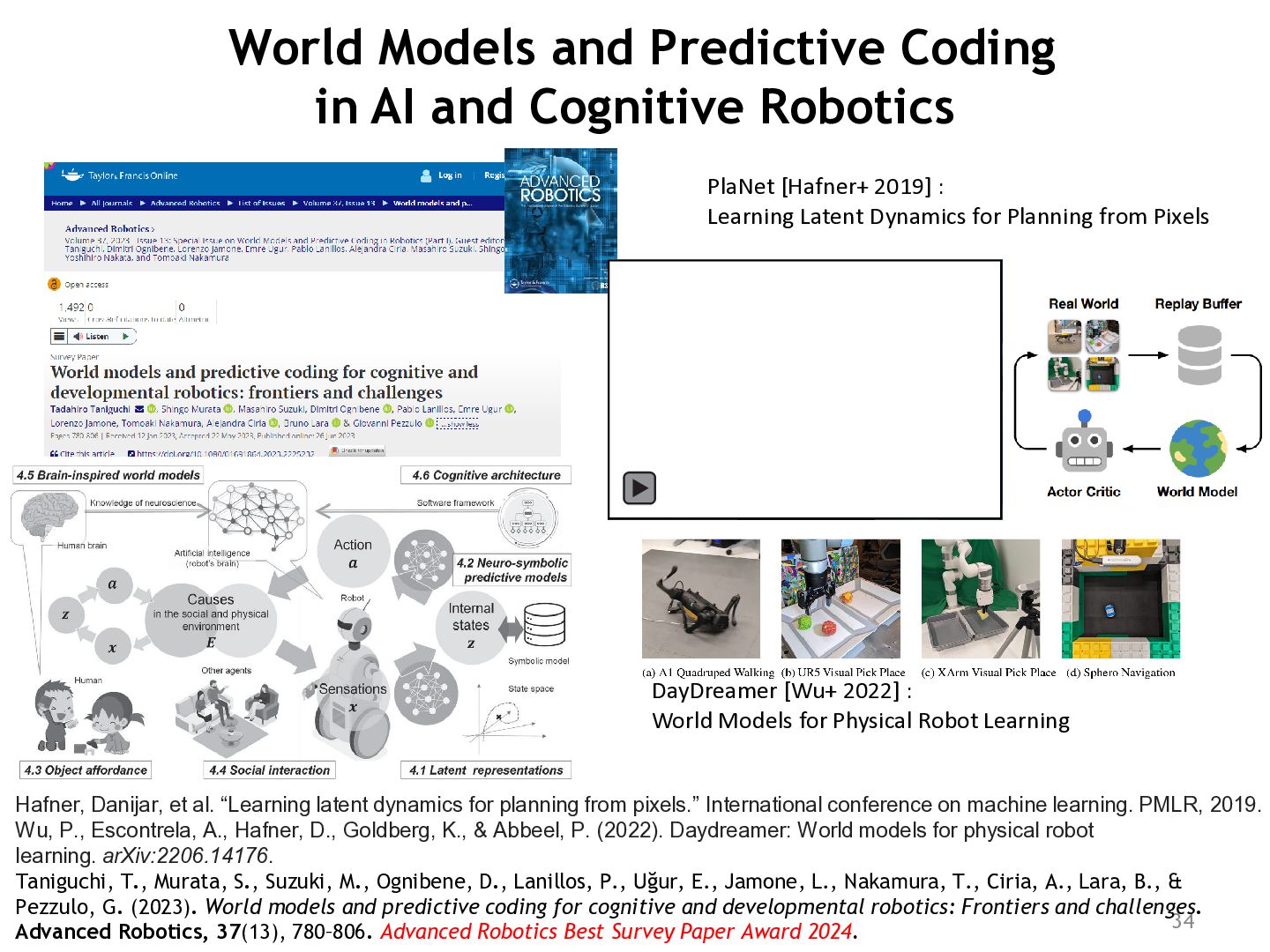
34 Hafner, Danijar, et al. “Learning latent dynamics for planning from pixels.” International conference on machine learning. PMLR, 2019. Wu, P., Escontrela, A., Hafner, D., Goldberg, K., & Abbeel, P. (2022). Daydreamer: World models for physical robot learning. arXiv:2206.14176. Taniguchi, T., Murata, S., Suzuki, M., Ognibene, D., Lanillos, P., Uğur, E., Jamone, L., Nakamura, T., Ciria, A., Lara, B., & Pezzulo, G. (2023). World models and predictive coding for cognitive and developmental robotics: Frontiers and challenges. Advanced Robotics, 37(13), 780–806. Advanced Robotics Best Survey Paper Award 2024. PlaNet [Hafner+ 2019] : Learning Latent Dynamics for Planning from Pixels DayDreamer [Wu+ 2022] : World Models for Physical Robot Learning
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![人間AI共創社会のデザインに向けて 人間は認知革命[ハラリ]から先で人間となり言語をつくり、法 をつくり、文明を築いてきた。 記号システムの連鎖的発展:音声言語 → 書き言葉 → 貨幣・宗 教記号・法制度](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
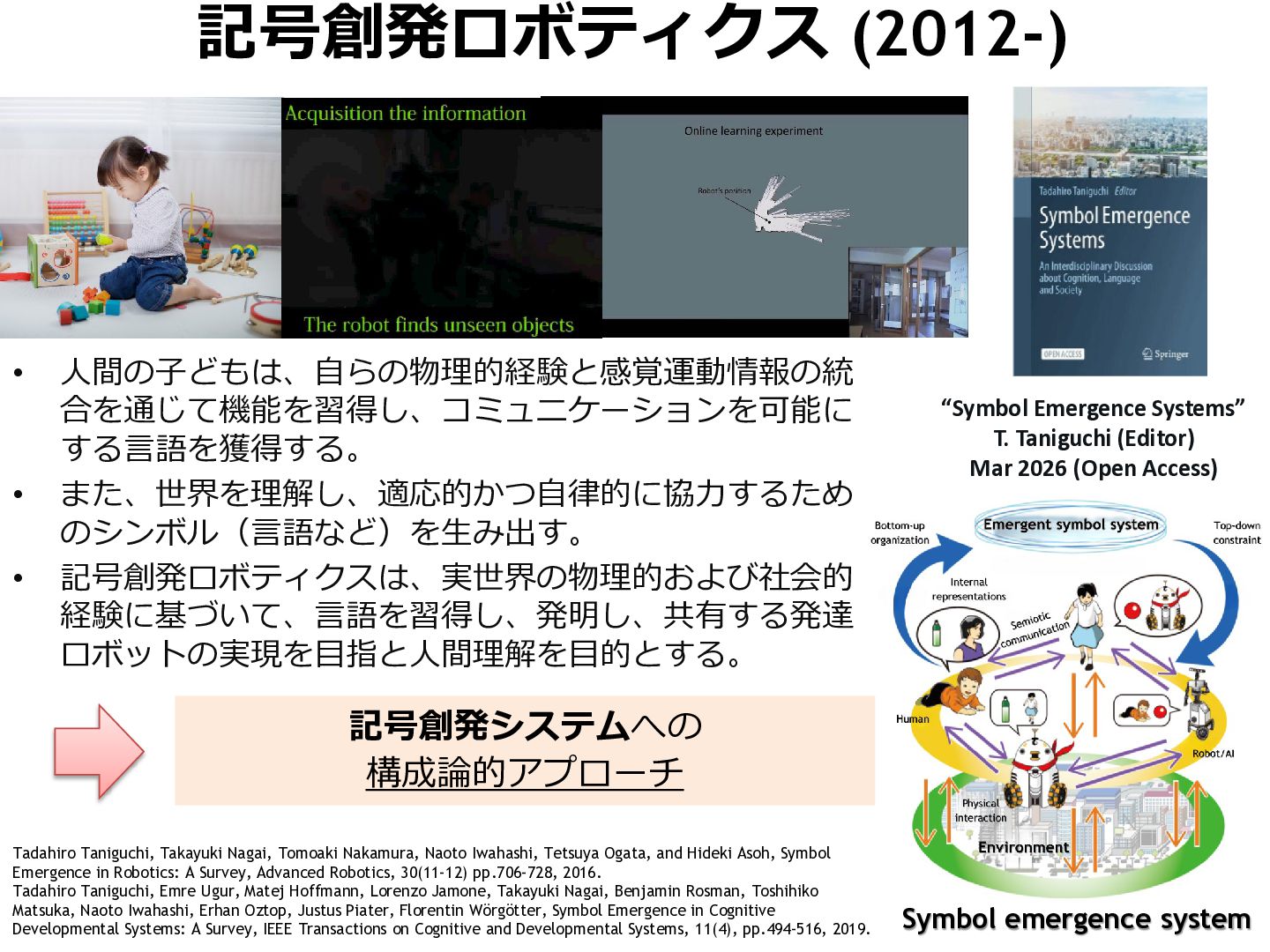
![Symbol emergence systems [Taniguchi+ 2016] 記号創発システム Tadahiro Taniguchi, Takayuki Nagai,](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![Symbol emergence systems [Taniguchi+ 2016] 記号創発システム 個体による 表現学習 集団による 記号創発](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
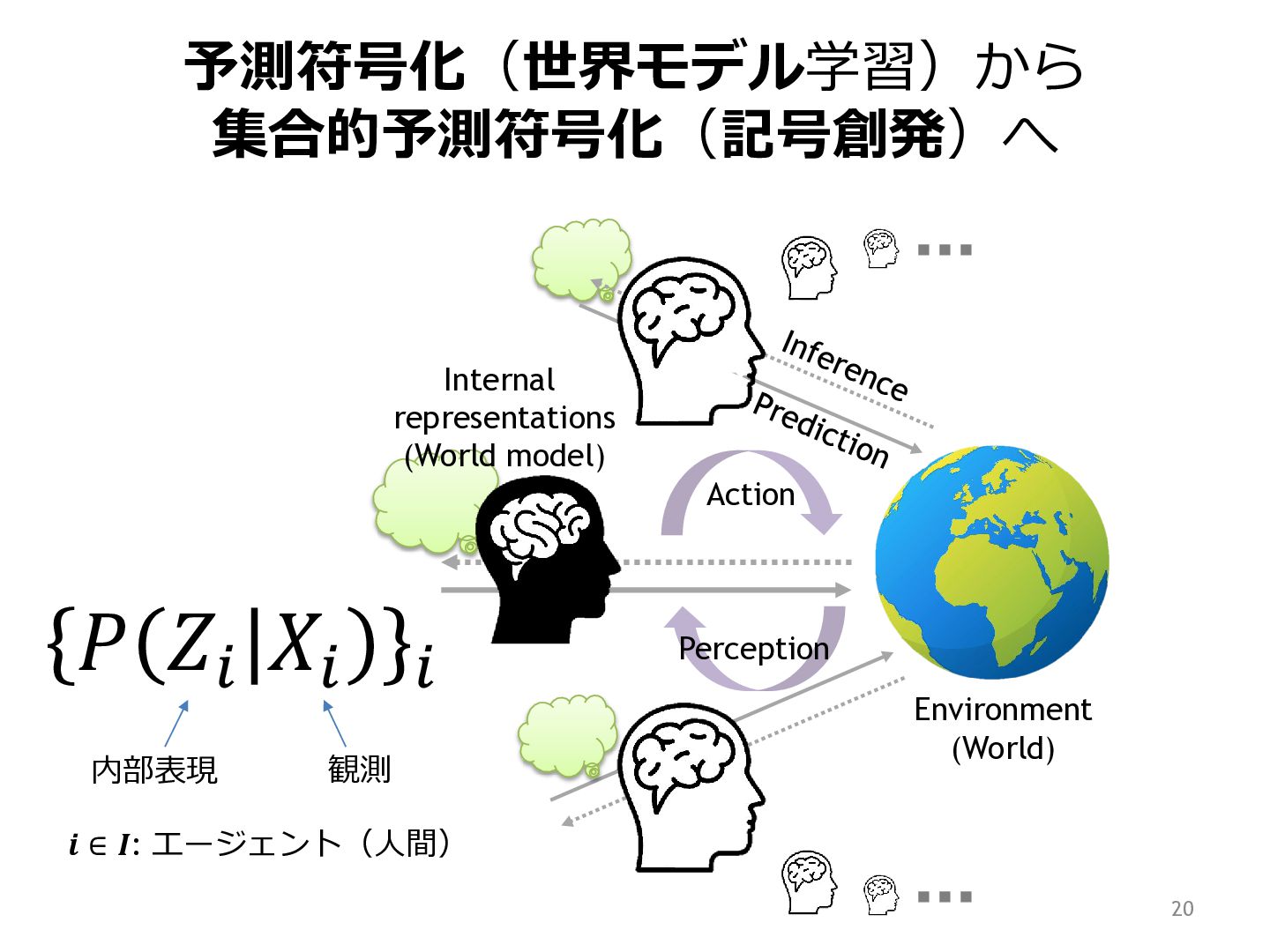
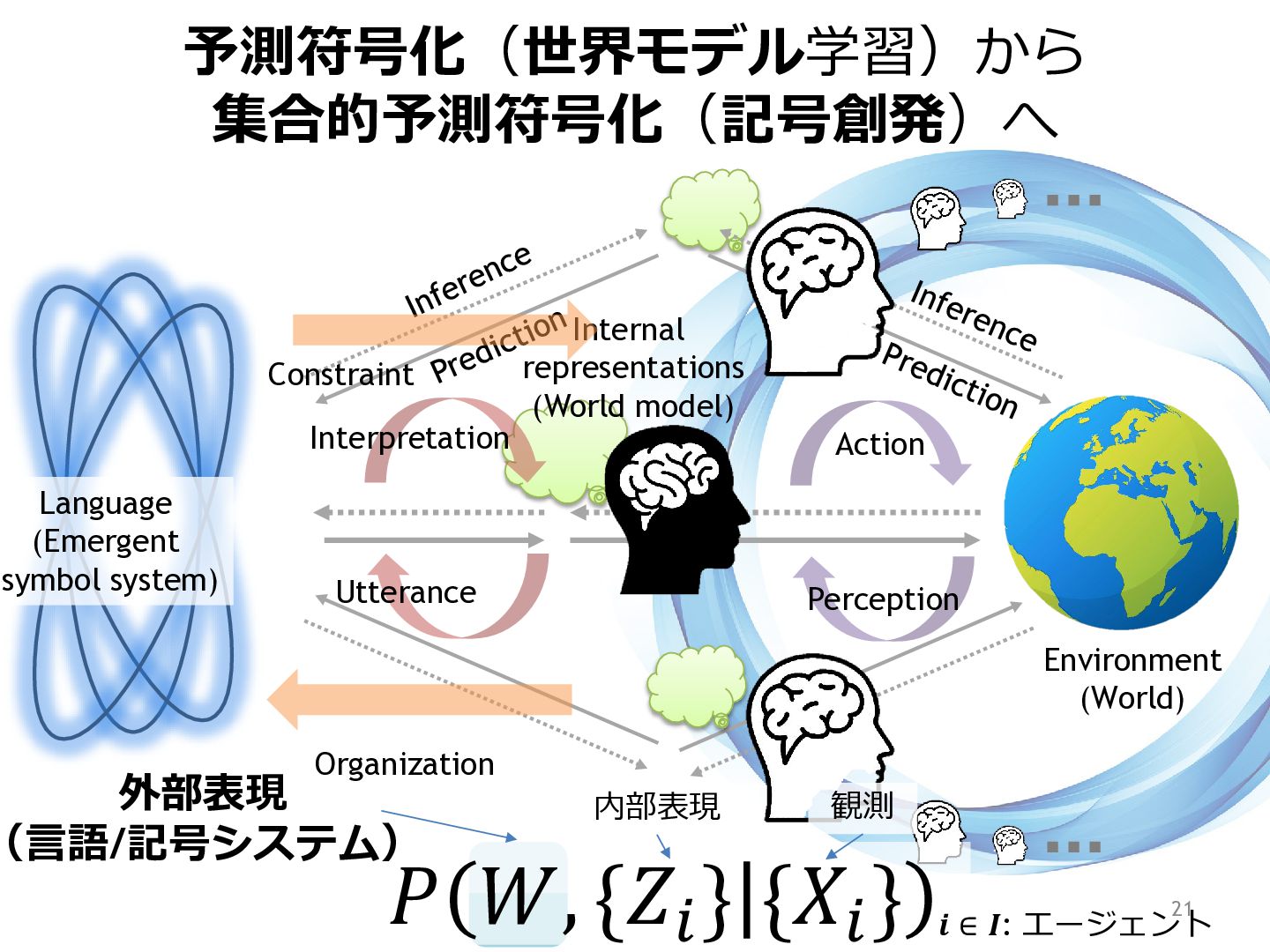
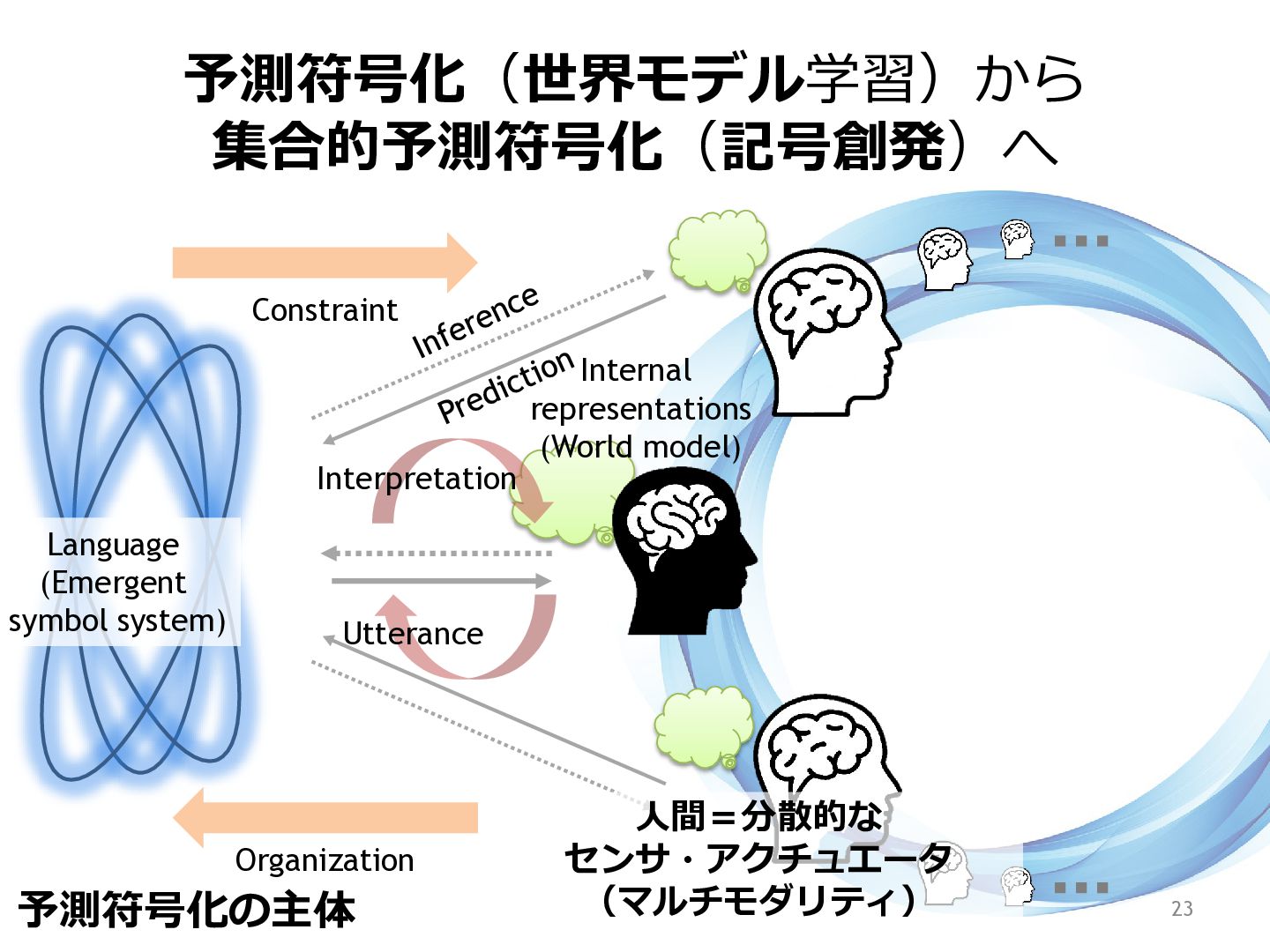
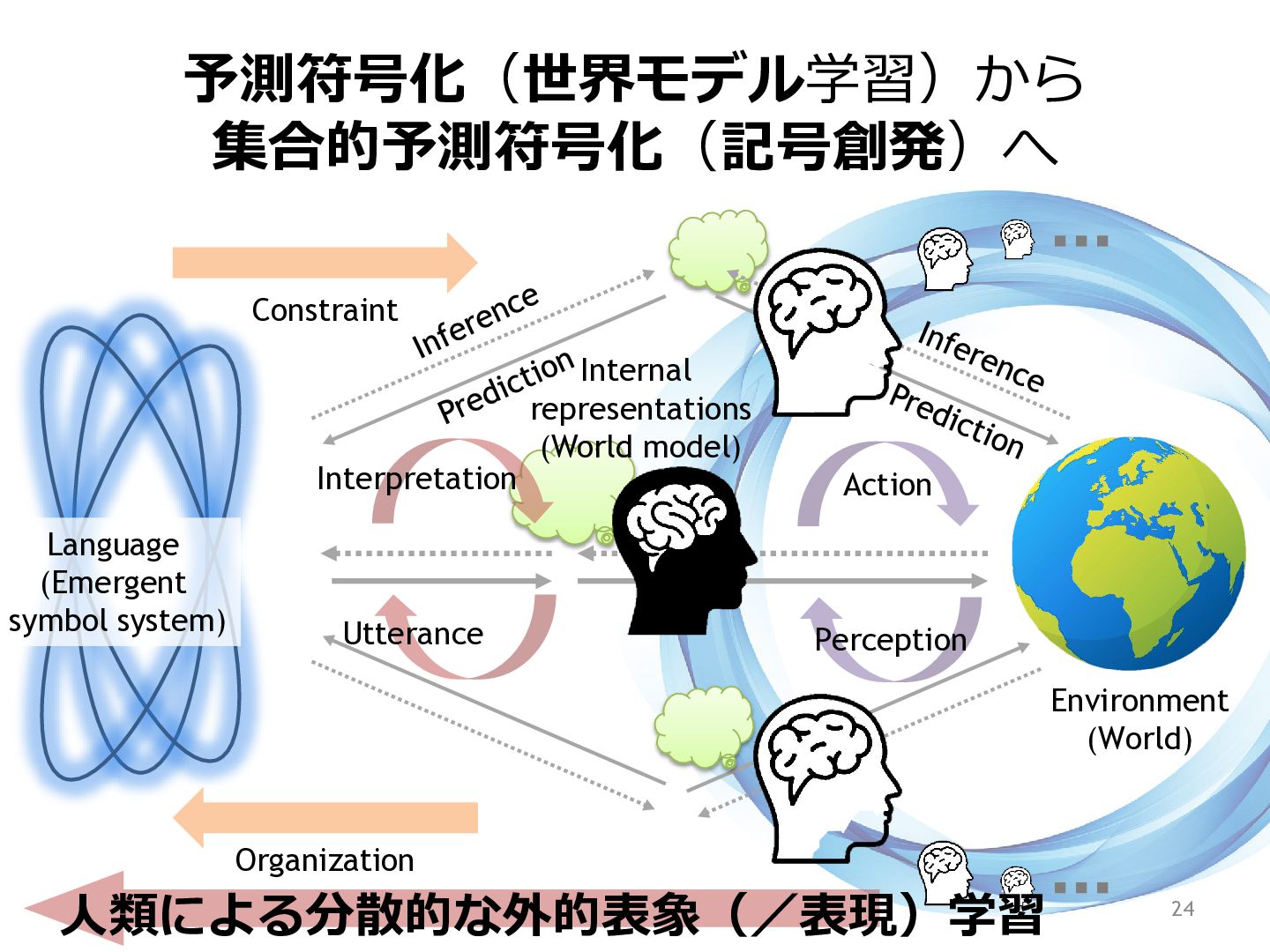
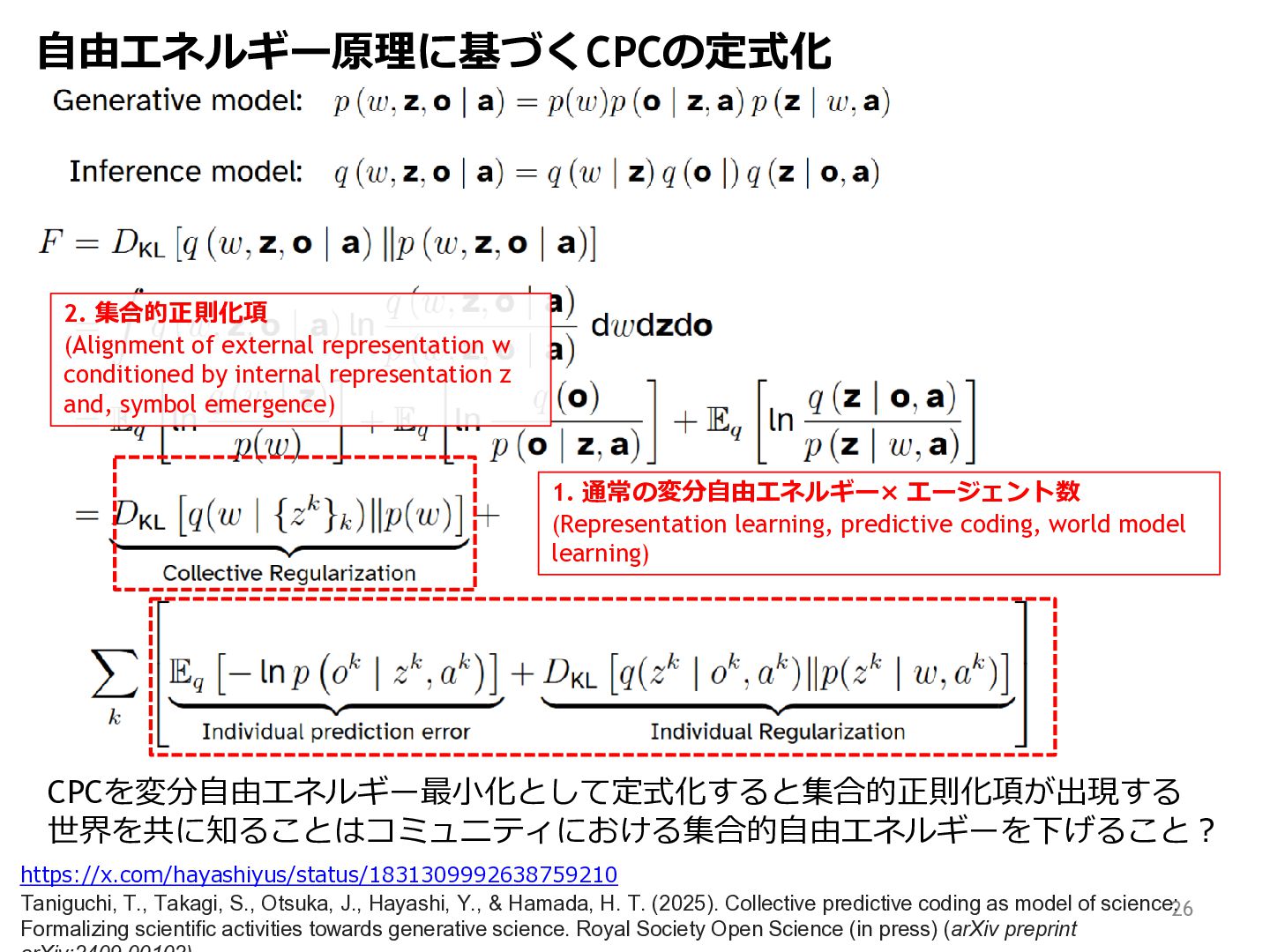
![集合的予測符号化(CPC) [Taniguchi ‘24] 言語/記号創発を人間集団による言語ゲームを通した集合的な予測符号化とし て定式化。(言語ゲームは自律分散的なベイズ推論として機能) 言語/記号システムは「集合的予測符号化」により形成されるのではないか︖ 言語そのものが集合的な予測符号化によって形成されるために、世界の情報が](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_24.jpg){kind=link}
{kind=link}
![キャプション生成ゲームを通じた 複数の視覚言語モデルのベイズ的統合 [Matsui+ 2025] Matsui, Y., Yamaki, R., Ueda, R.,](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_26.jpg){kind=link}
![28 共同注意名付けゲームにおけるMetropolis-Hastingsアルゴリズム の妥当性に関する実験記号的研究 [Okumura+ 2023] MH法の受容確率は人間の受容判断を相対的によく予測できていた Okumura, Ryota, Tadahiro Taniguchi,](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![世界モデルに基づくロボットの学習と応用 @ムーンショット目標3原田香奈子PJ「人とAIロボットの創造的共進化による サイエンス開拓」&パナソニック共同研究(クロスアポイントメント) を通して世界モデルの基礎研究と応用研究を行ってきた。 Tactile-Sensitive NewtonianVAE [Okumura+ 2022] NewtonianVAE [Jaques+](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
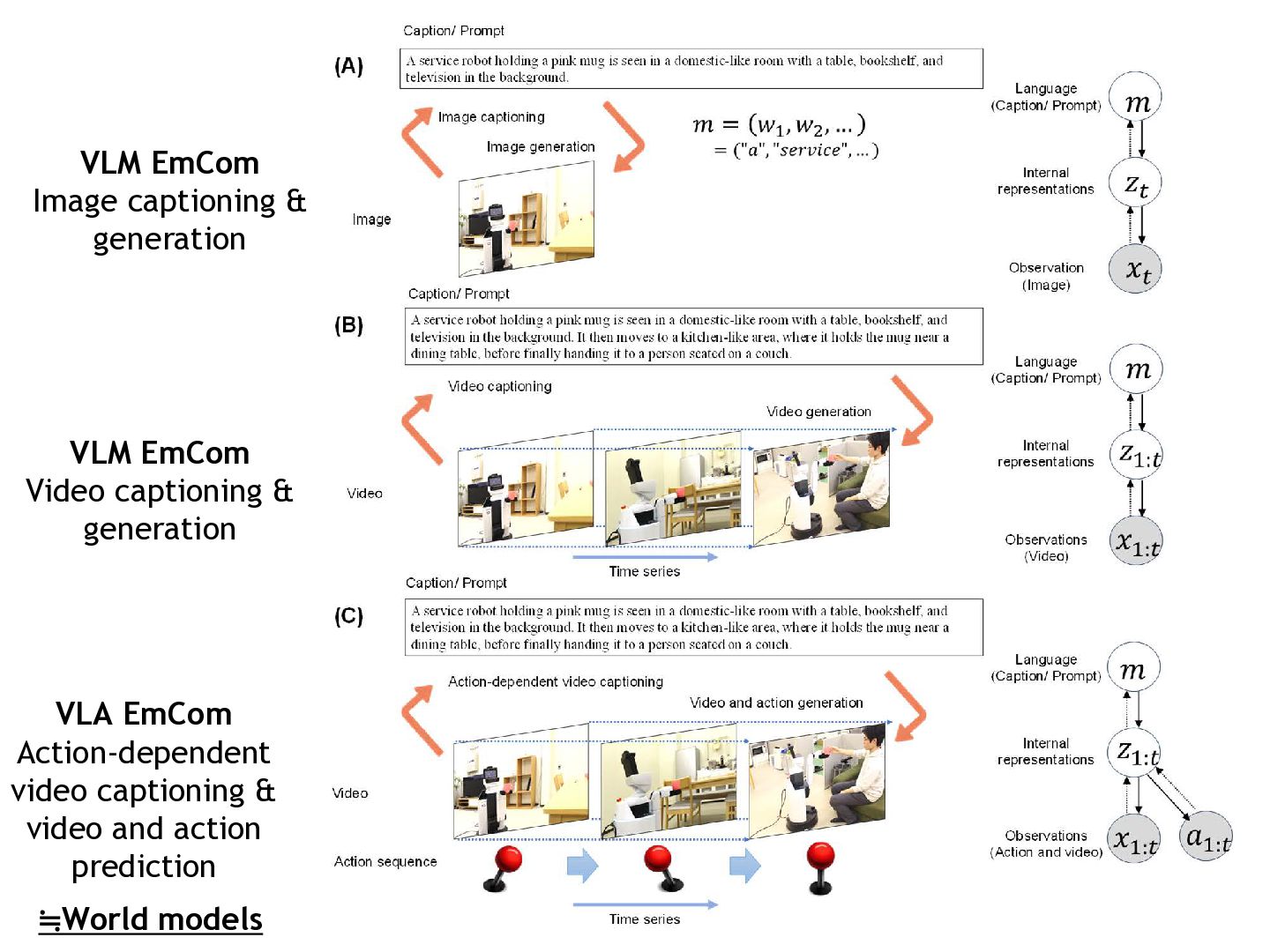
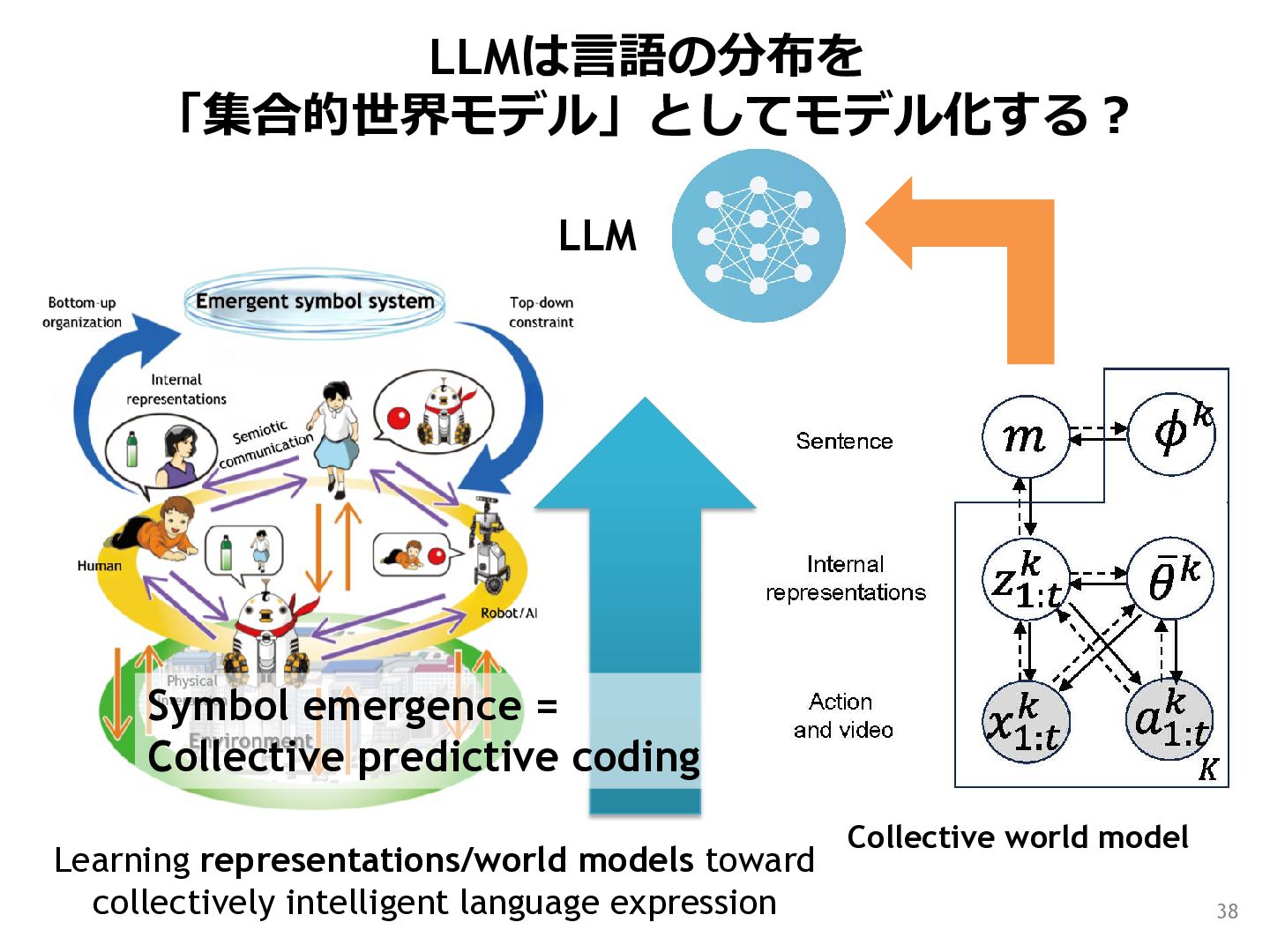
![LLMが世界を「理解」しているように見える理由 集合的世界モデル仮説[Taniguchi ‘26] 言語創発は、自由エネルギー原理と世界モデルの理論的枠組みの延 長として位置付けることができる。 その枠組では言語は集団的予測符号化を通じて生成されるため、環 境に関する構造的情報は言語の分布意味論に埋め込まれる。 ](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![LLMによるマルチCAへのタスク分割と自在化 [K. Obata+, RA-L 2024] 44 Predict Action List Make](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_43.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
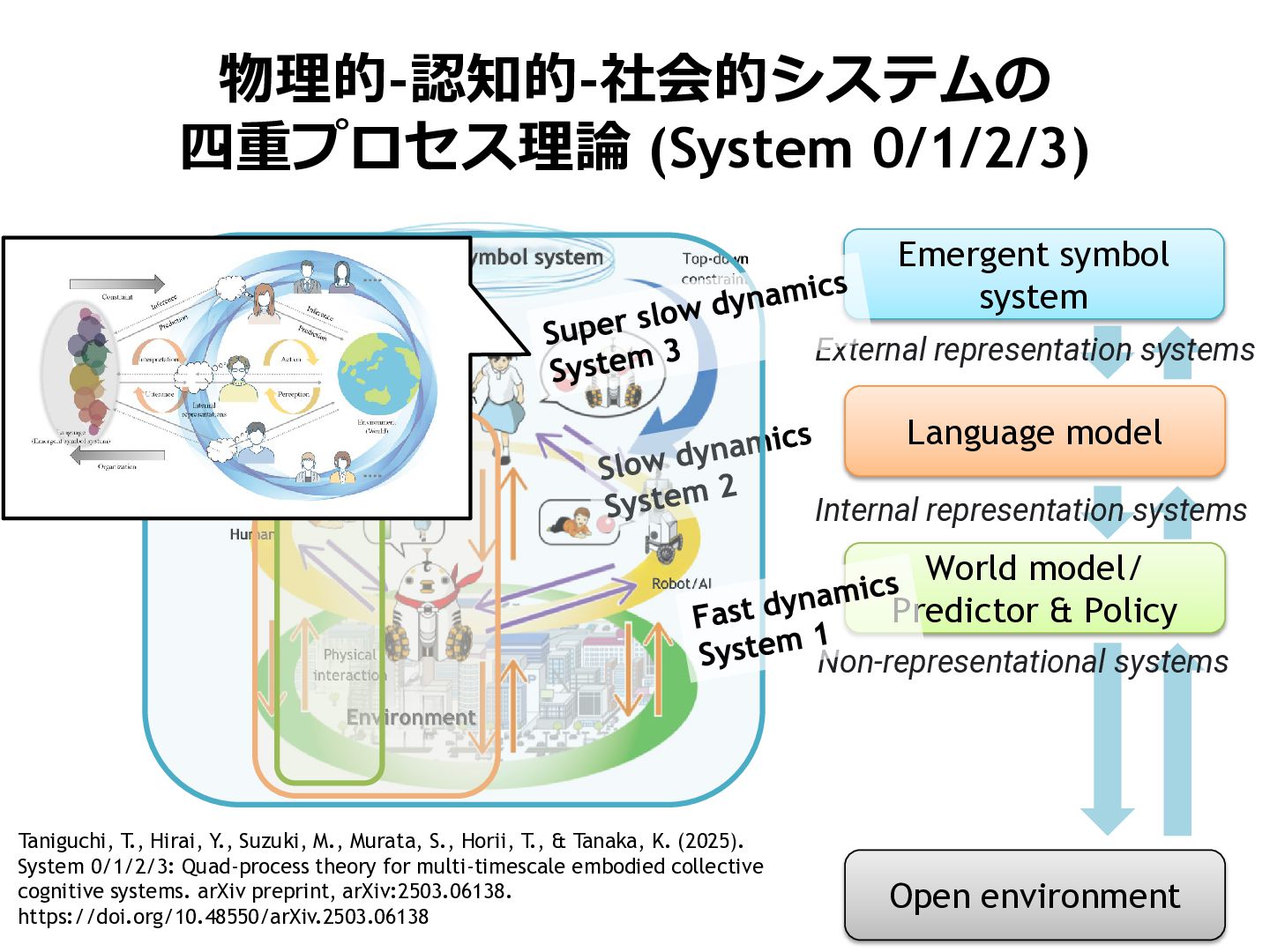
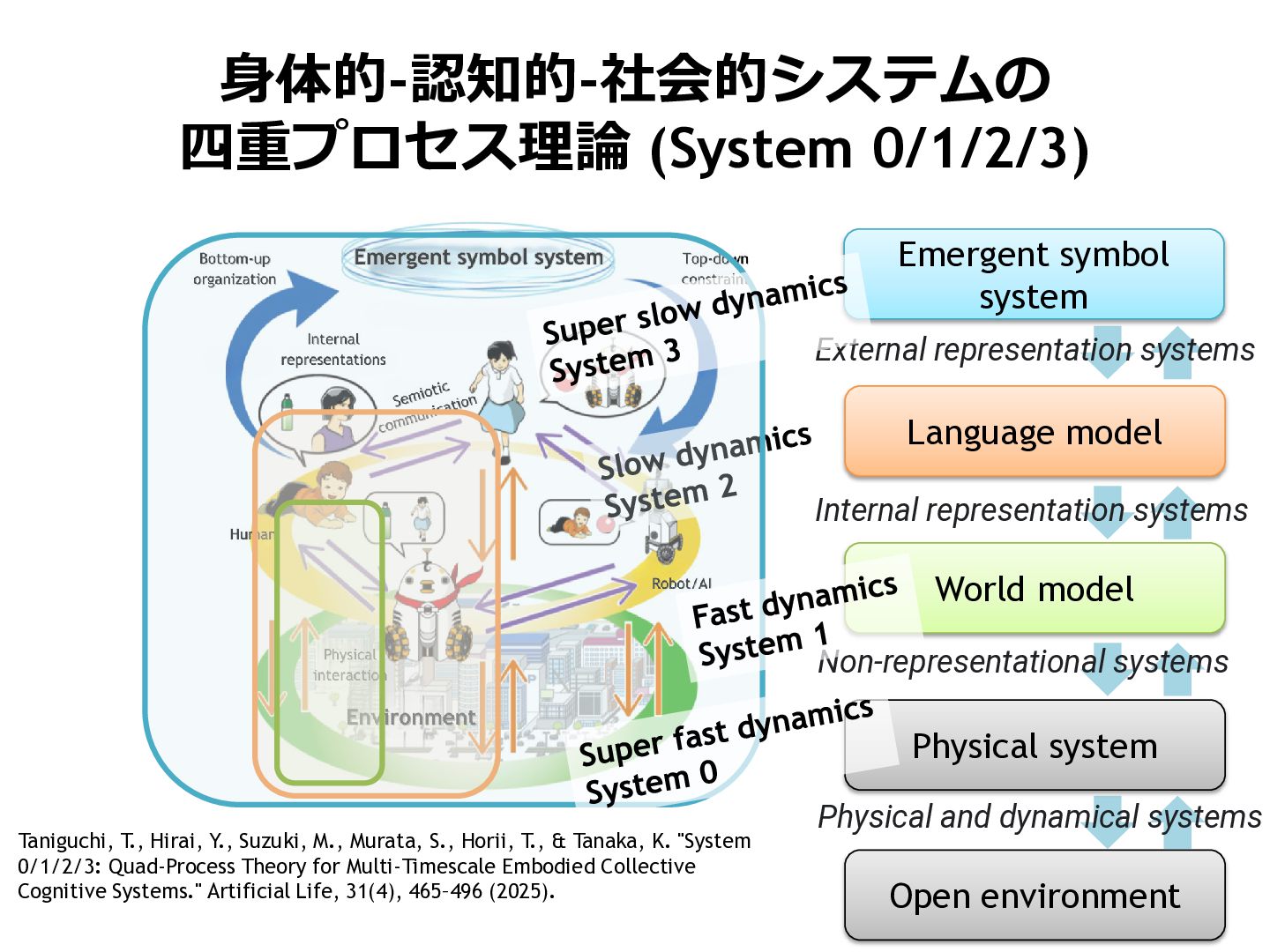
![System 0/1/2/3: Quad-process theory [Taniguchi+ 2025] ベルクソン哲学のマルチタイムスケール解釈との融合 平井(哲学者)との共著により、System 0/1/2/3フレーム ワークとベルクソン哲学の関係性を明確にし、身体性から言](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_52.jpg){kind=link}
{kind=link}
{kind=link}
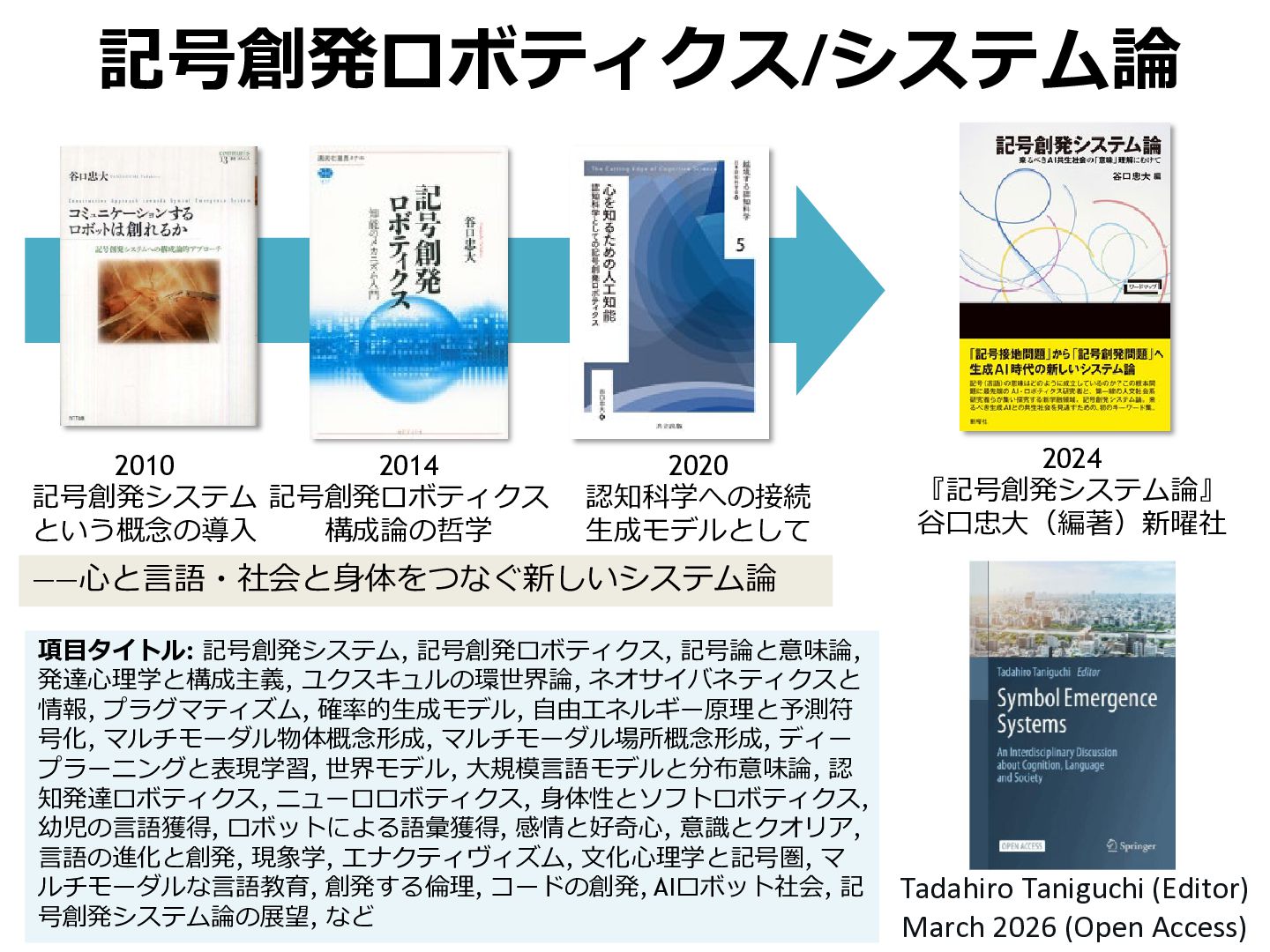
![統合的な知能の科学 記号創発システム科学へ Email: [email protected] Twitter: @tanichu 『ワードマップ 記号創 発システム論』 谷口忠大(編著)新曜社](https://files.speakerdeck.com/presentations/8ffa50154d574fababe066456bb58863/slide_55.jpg){kind=link}