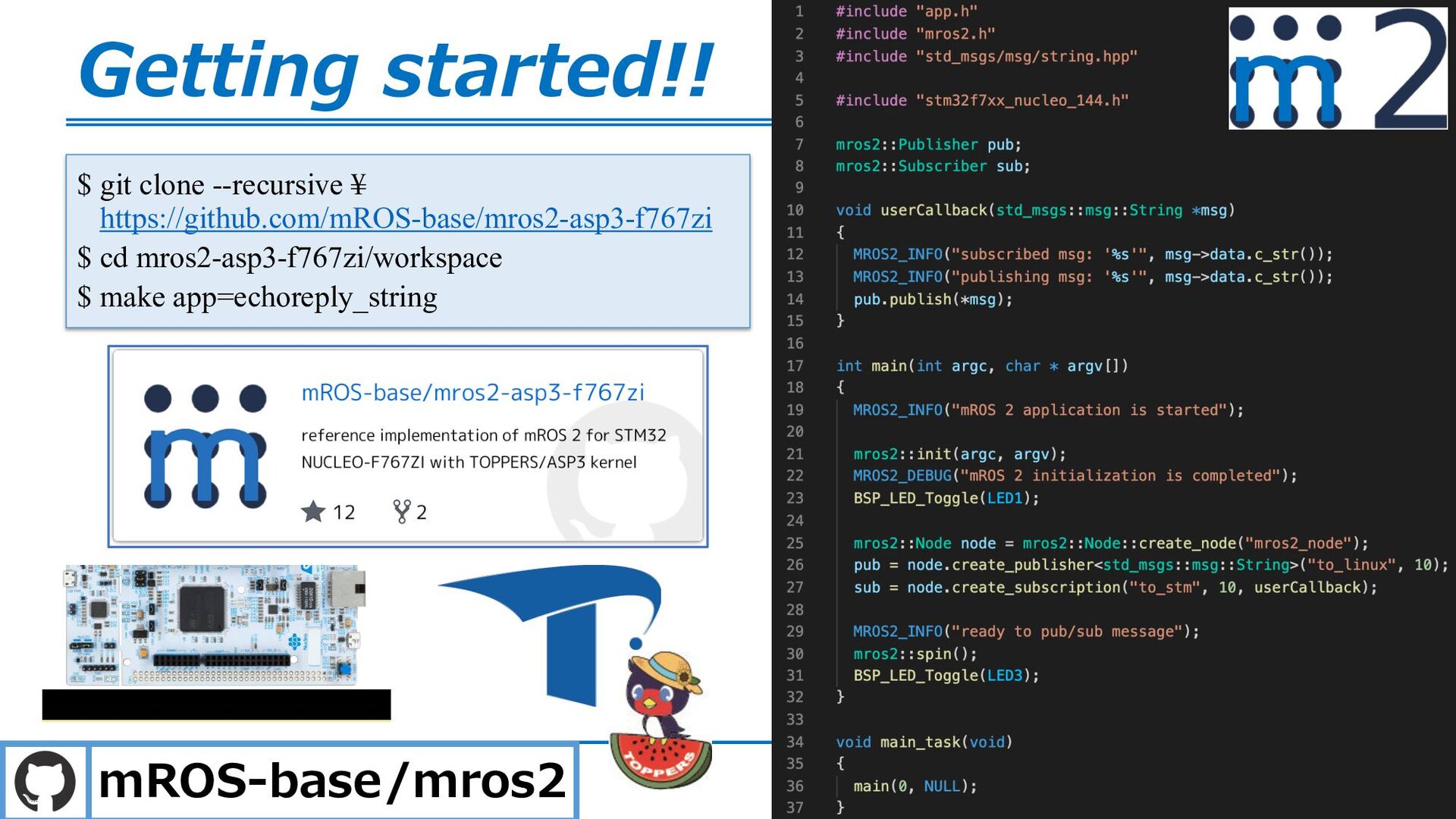
on the list of supported platform 🎉 https://rosjp.connpass.com/event/222141/ https://www.youtube.com/watch?v=YeQgeTnw5Tc&t=2393s • just in 5 minutes to try it Build with docker on the host (ghcr.io/armmbed/mbed-os-env) Keil Studio Cloud a.k.a Mbed Online Compiler https://os.mbed.com/users/smoritaemb/code/ mbed-os-example-mros2/
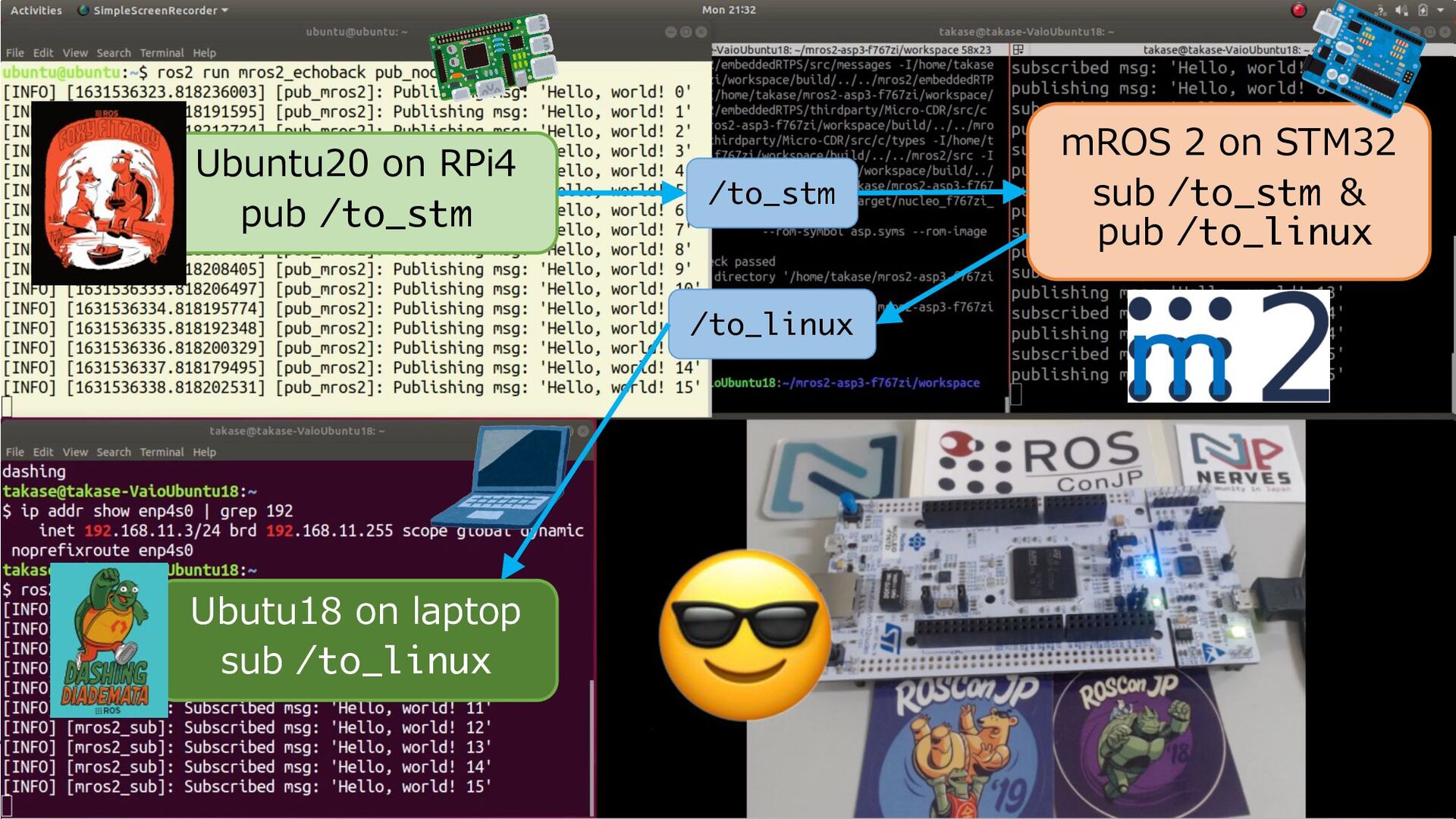
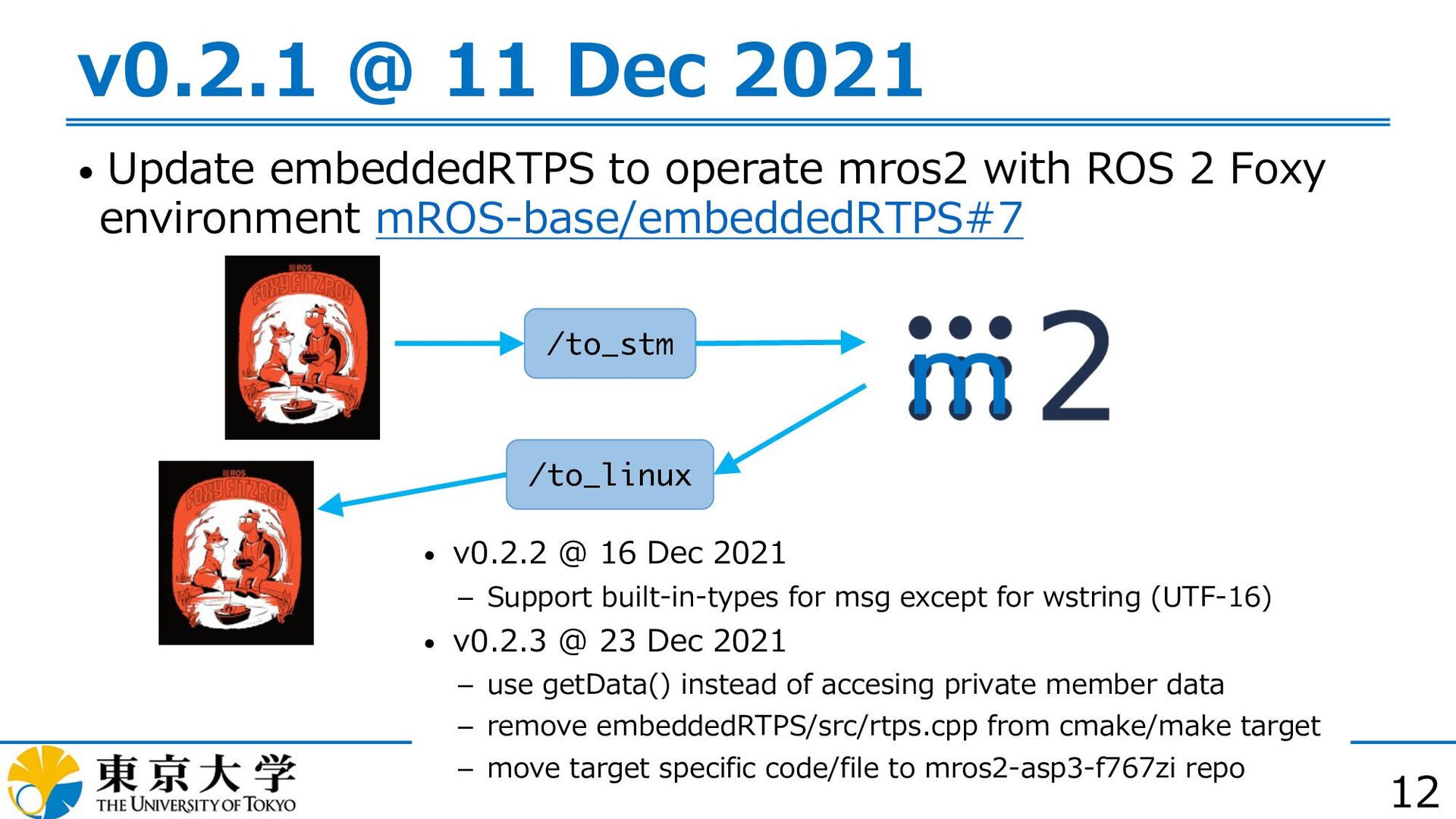
operate mros2 with ROS 2 Foxy environment mROS-base/embeddedRTPS#7 /to_stm /to_linux • v0.2.2 @ 16 Dec 2021 Support built-in-types for msg except for wstring (UTF-16) • v0.2.3 @ 23 Dec 2021 use getData() instead of accesing private member data remove embeddedRTPS/src/rtps.cpp from cmake/make target move target specific code/file to mros2-asp3-f767zi repo
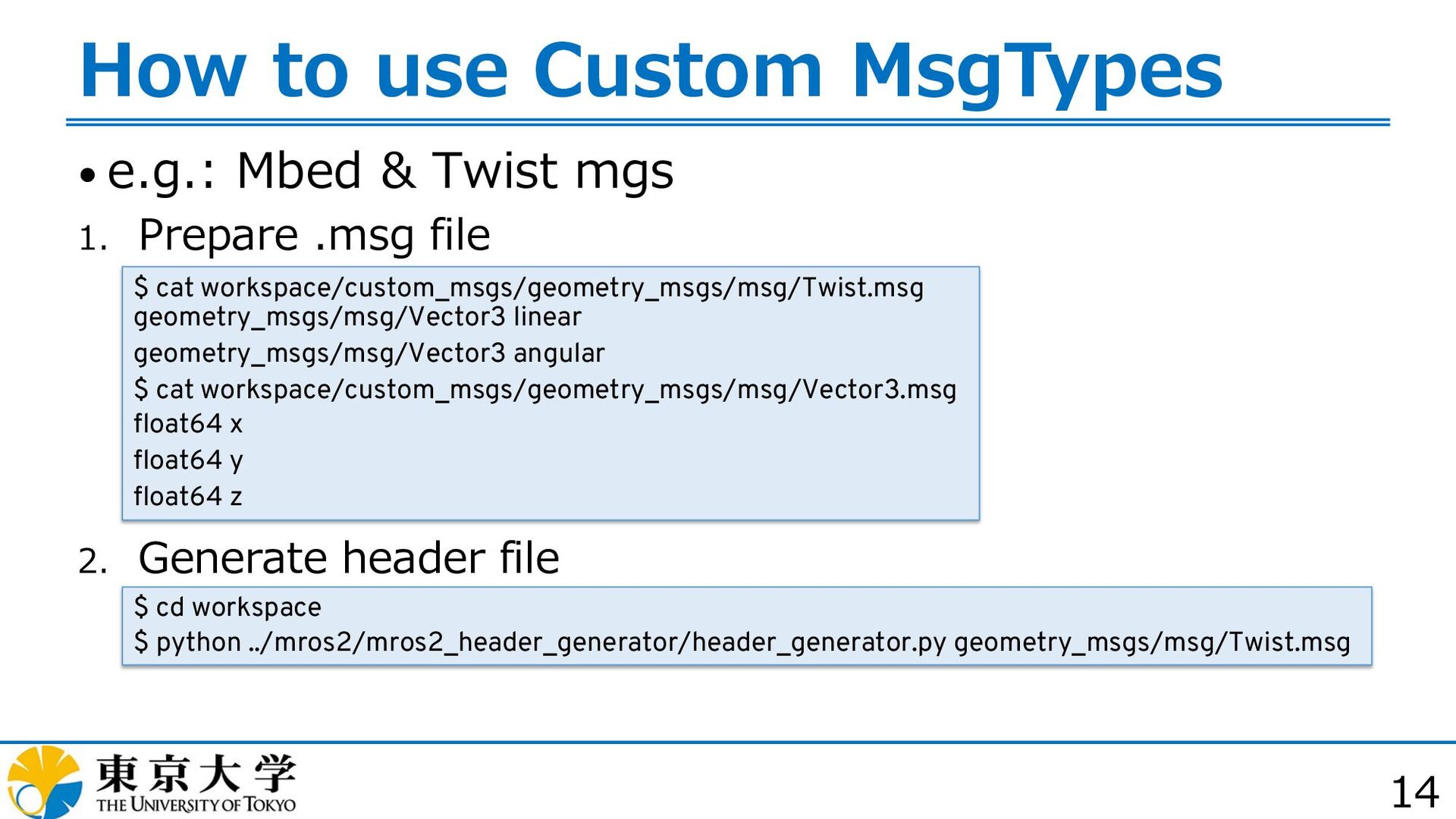
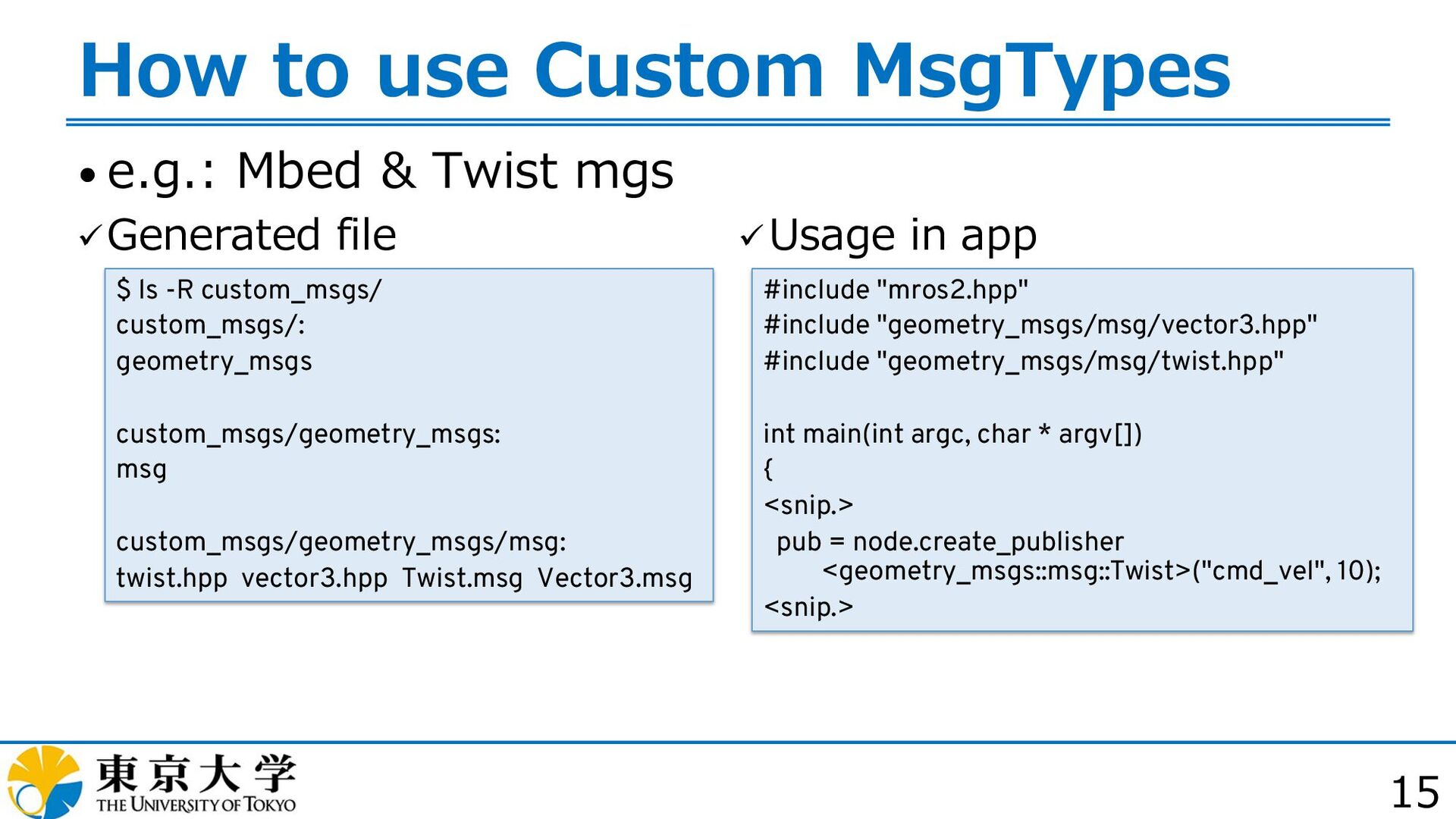
platform already worked fine with Ubuntu (native & docker) übut, porting to POSIX compliant RTOS & checking the operation have not progressed yet does not yet support custom MsgTypes but, embeddedRTPS has been bumped to its latest version and also, enhancing the documentation is needed,,,
contribution!! https://github.com/mROS-base/mros2 • operation check with another Mbed ready boards • check with Galactic & support Humble?? • implement new target with POSIX compliant RTOS • support QoS control, Service, Action,...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
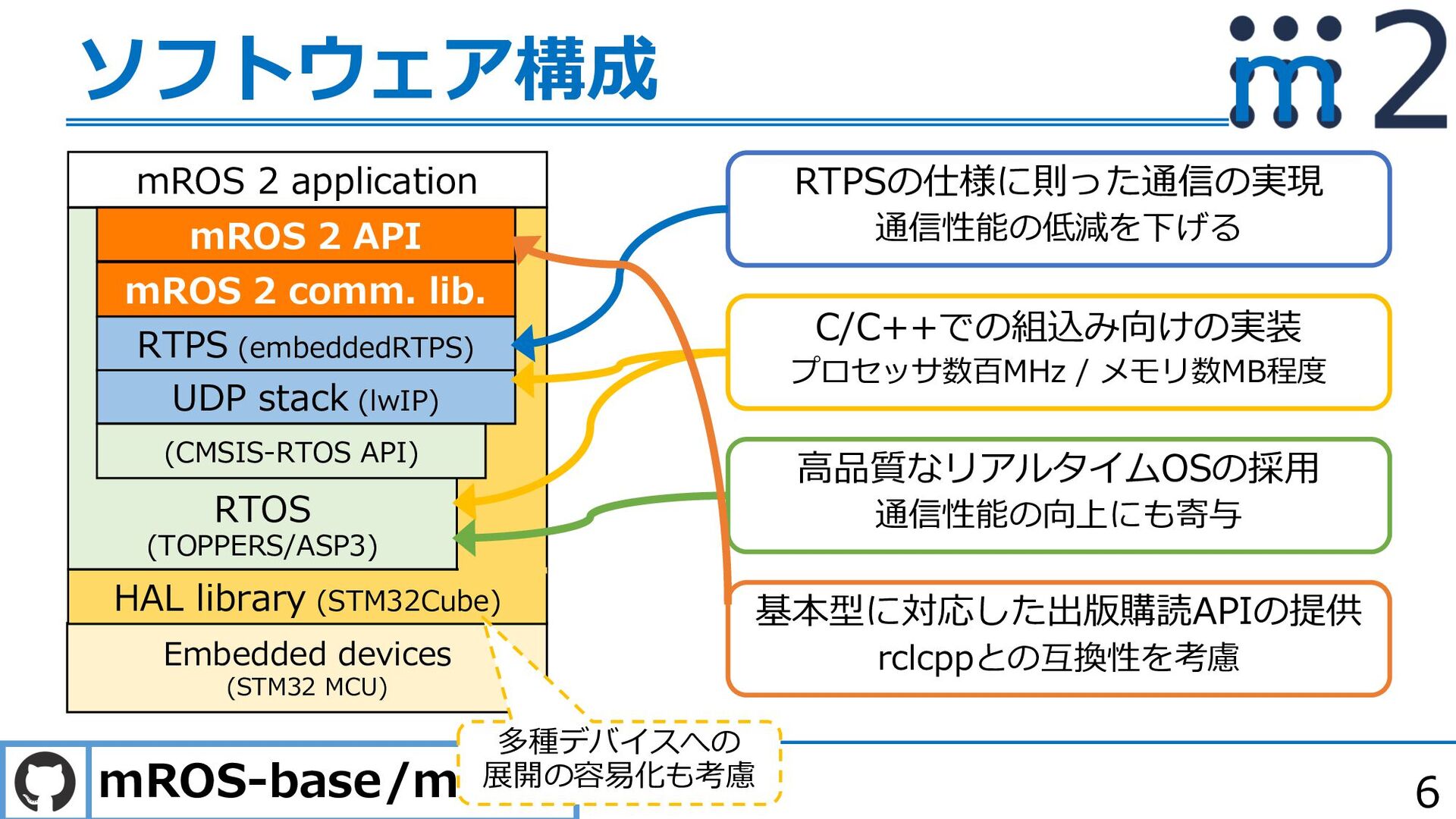
![7 補⾜︓embeddedRTPS [A. Kampmann+ ITSC'2019] • C++実装による組込み向けのRTPSスタック UDP/IP には lwIP](https://files.speakerdeck.com/presentations/c6482d1656294f2d9d56f9693269884a/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}