ROSCon 2022
2022/10/21
https://roscon.ros.org/2022/
Vimeo Archive:
https://vimeo.com/showcase/9954564/video/767150435
Speakers and Contributors:
Hideki Takase, Shintaro Hosoai, Yoichiro Hibara, Haruaki Tanaka (The University of Tokyo), Hidetoshi Yugen (Kyoto University), Shoji Morita (eSOL Co.,Ltd.)
Abstract:
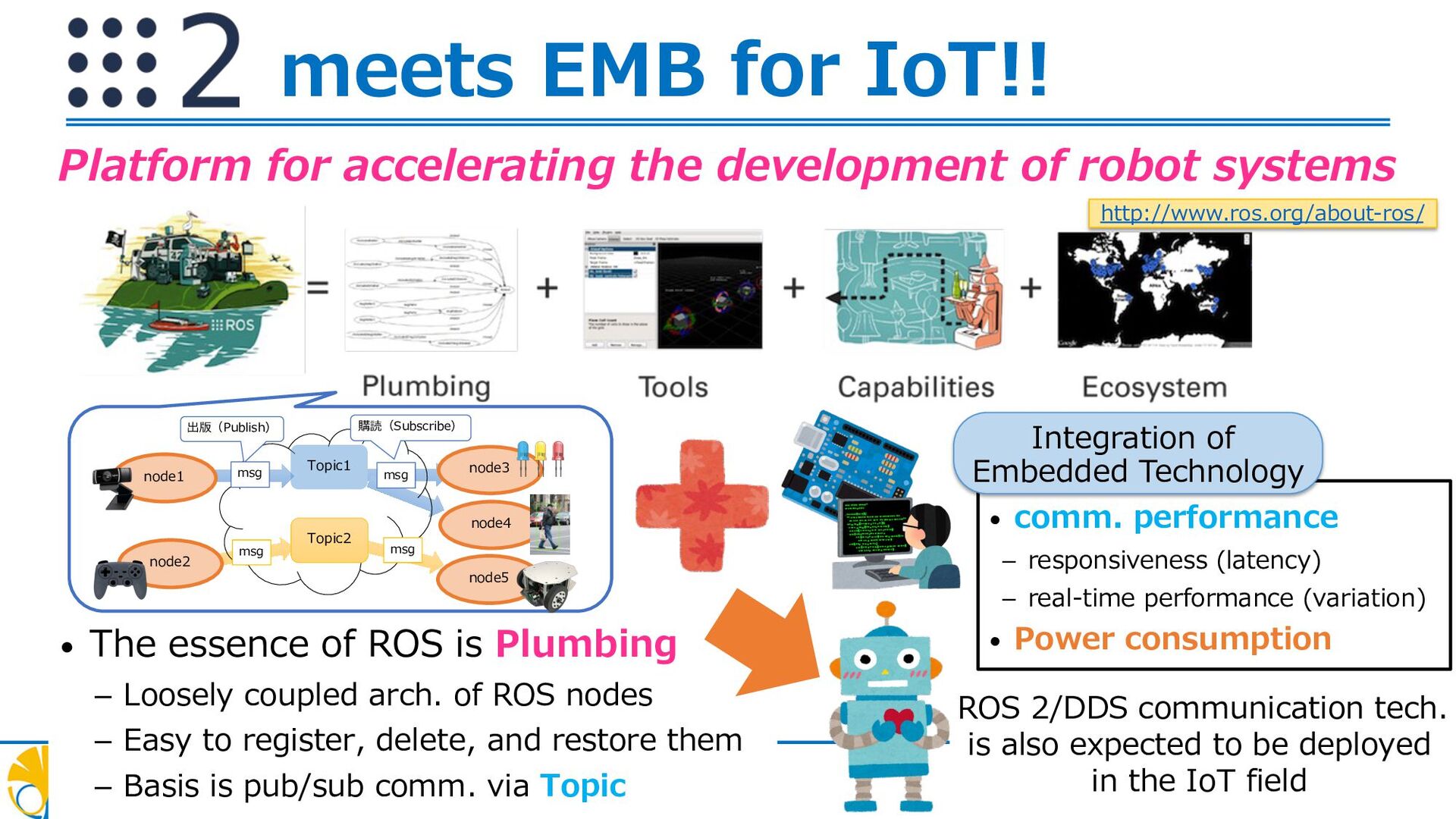
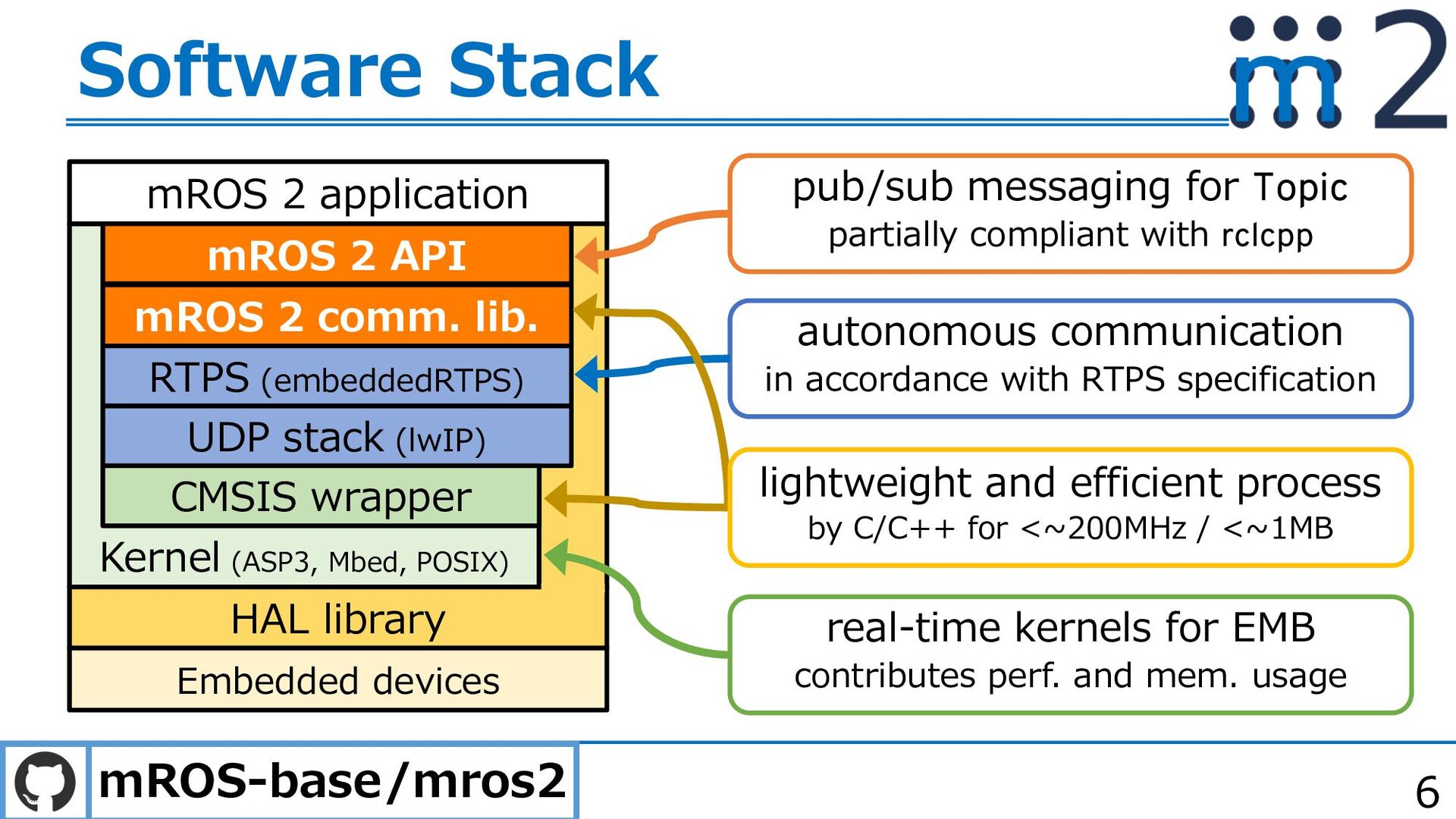
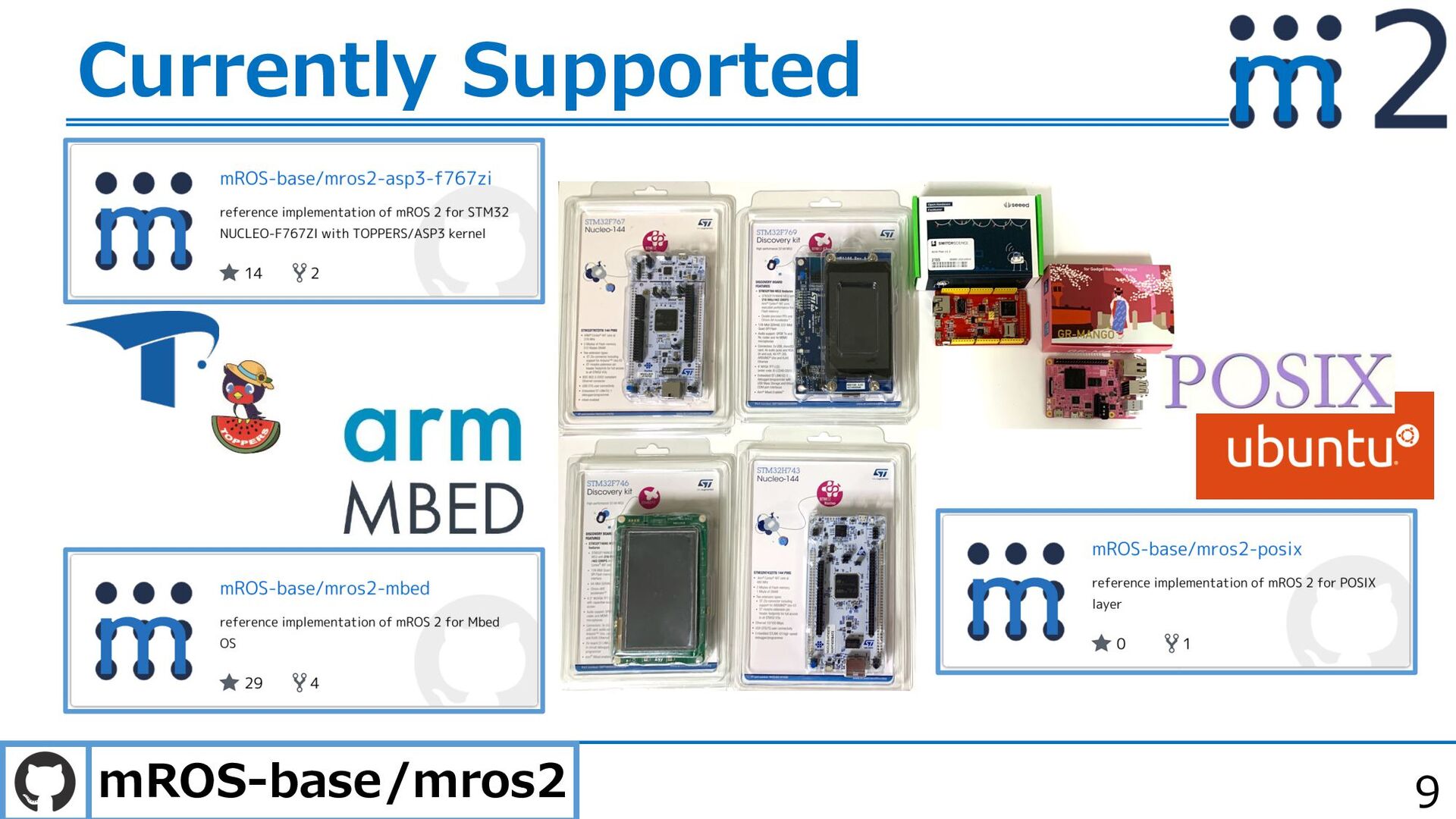
By installing ROS 2 nodes onto embedded micro-controller, robots can acquire better real-time performance and power efficiency. Of course, micro-ROS is a de-facto environment, but it is better to have different options to realize them. This talk proposes mROS 2, which realizes an agent-less and lightweight runtime environment compatible with ROS 2 for embedded devices. It consists of basic APIs that are mostly compliant with Rclcpp for the topic communication, an embedded version of the RTPS protocol stack, and a real-time kernel. We will demonstrate that embedded nodes can now directly communicate with native ROS 2 nodes via topics efficiently.
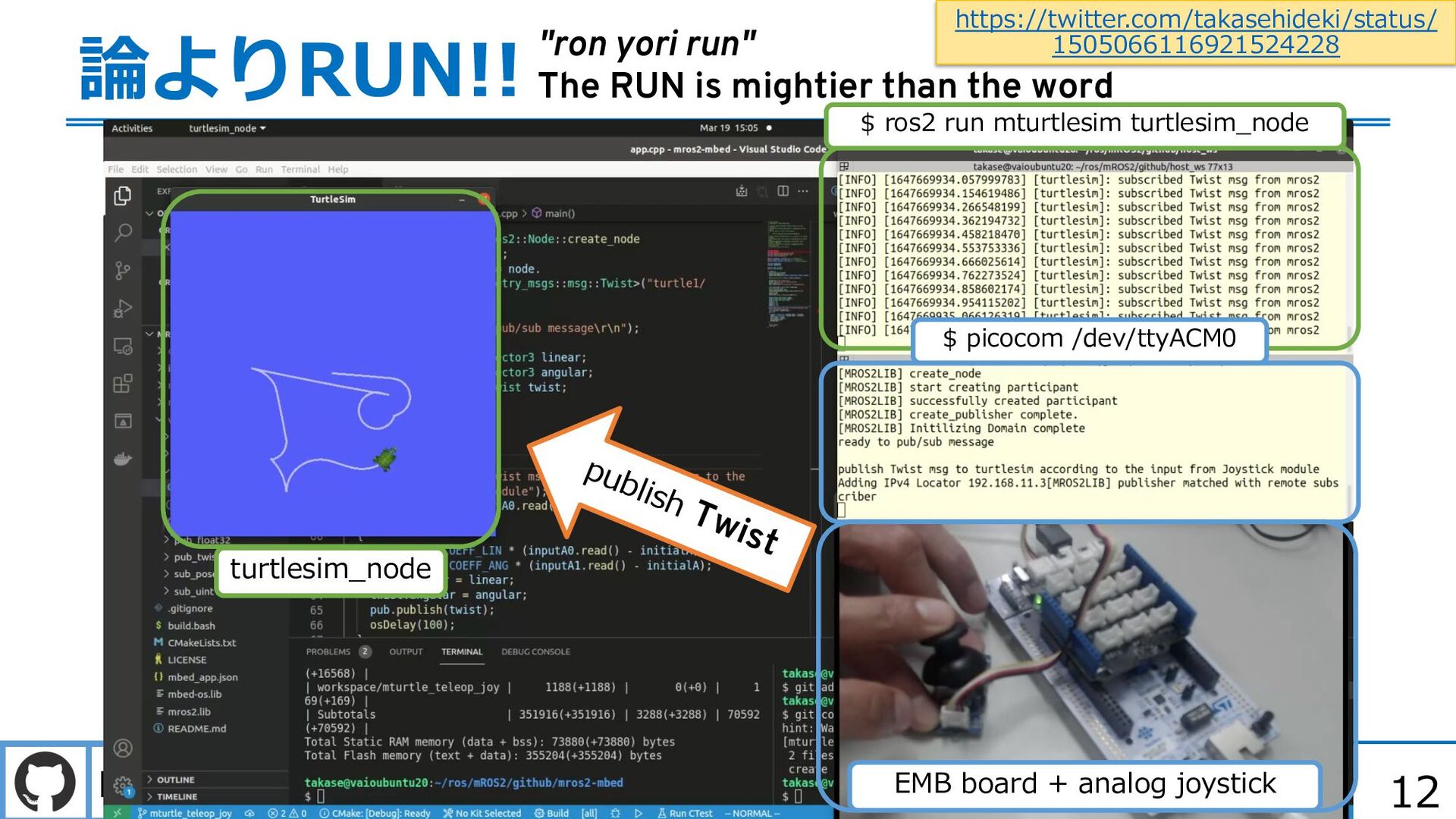
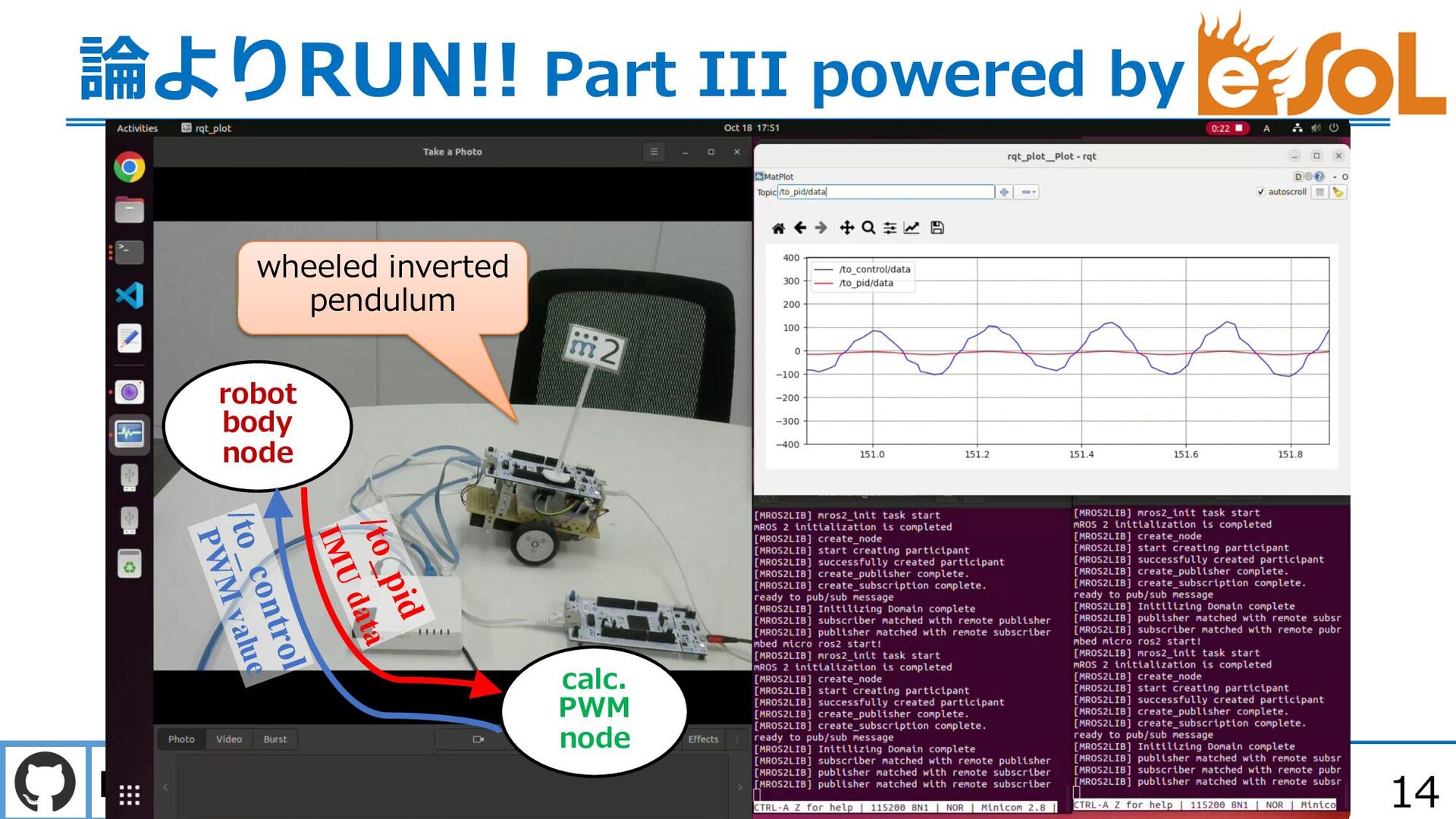
Demonstrations a.k.a 論よりRUN:
Part1 (p.12) https://twitter.com/takasehideki/status/1505066116921524228
Part2 (p.13) https://twitter.com/takasehideki/status/1584486712780390401
Part3 (p.14) https://twitter.com/takasehideki/status/1584488359808102402
More Info (STAR please!!):
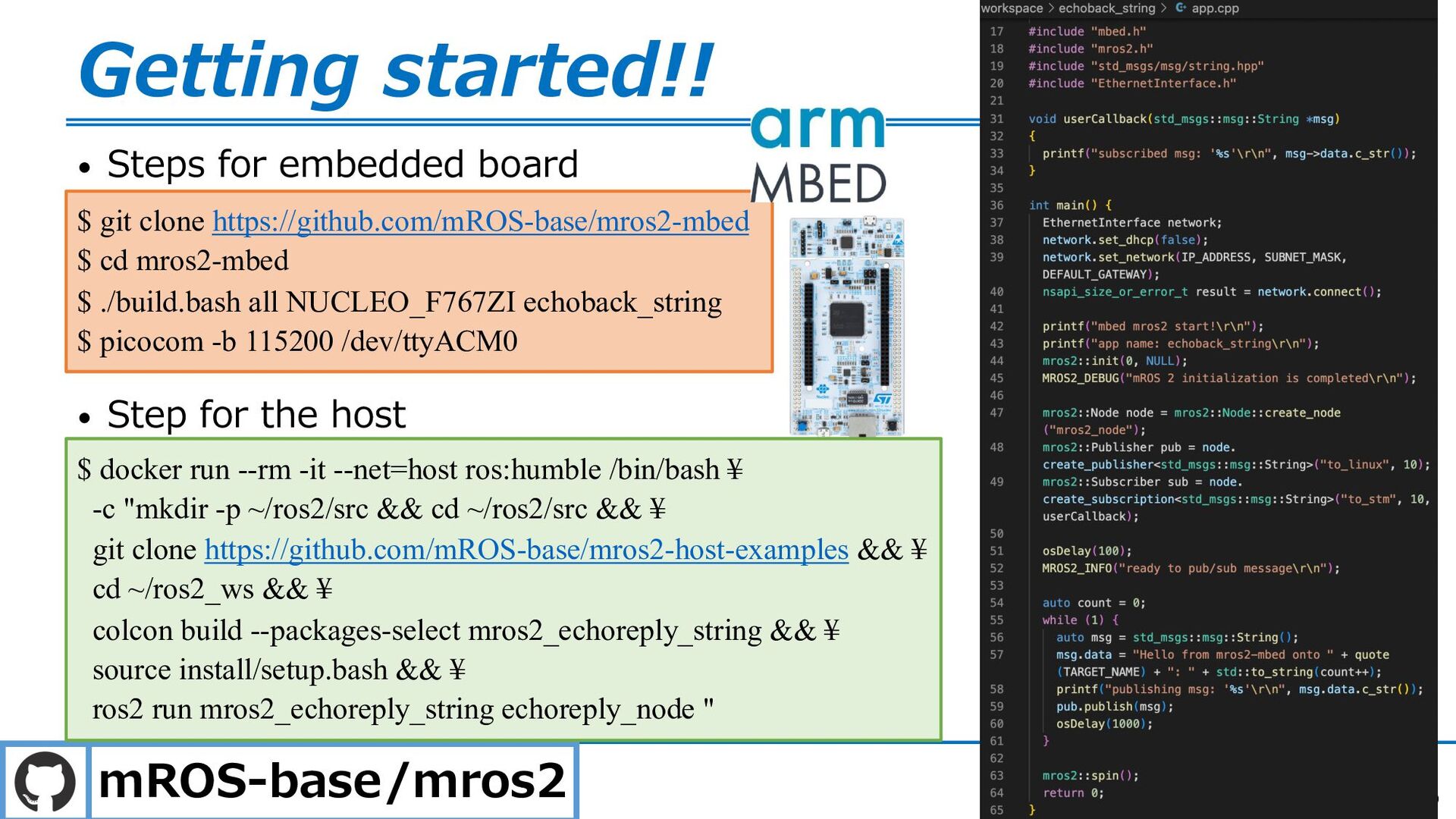
https://github.com/mROS-base/mros2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![7 Note: embeddedRTPS [A. Kampmann+ ITSC'2019] • Portable RTPS implementation](https://files.speakerdeck.com/presentations/5e189c64ddbd40369584d5334fbac079/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
![mROS-base/mros2 10 Evaluation [email protected] with Foxy uros-serial uros-udp uros-rtps mros2-asp3](https://files.speakerdeck.com/presentations/5e189c64ddbd40369584d5334fbac079/slide_9.jpg){kind=link}
![11 Evaluation Results • UInt16 [ms] uros- serial uros- udp](https://files.speakerdeck.com/presentations/5e189c64ddbd40369584d5334fbac079/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}