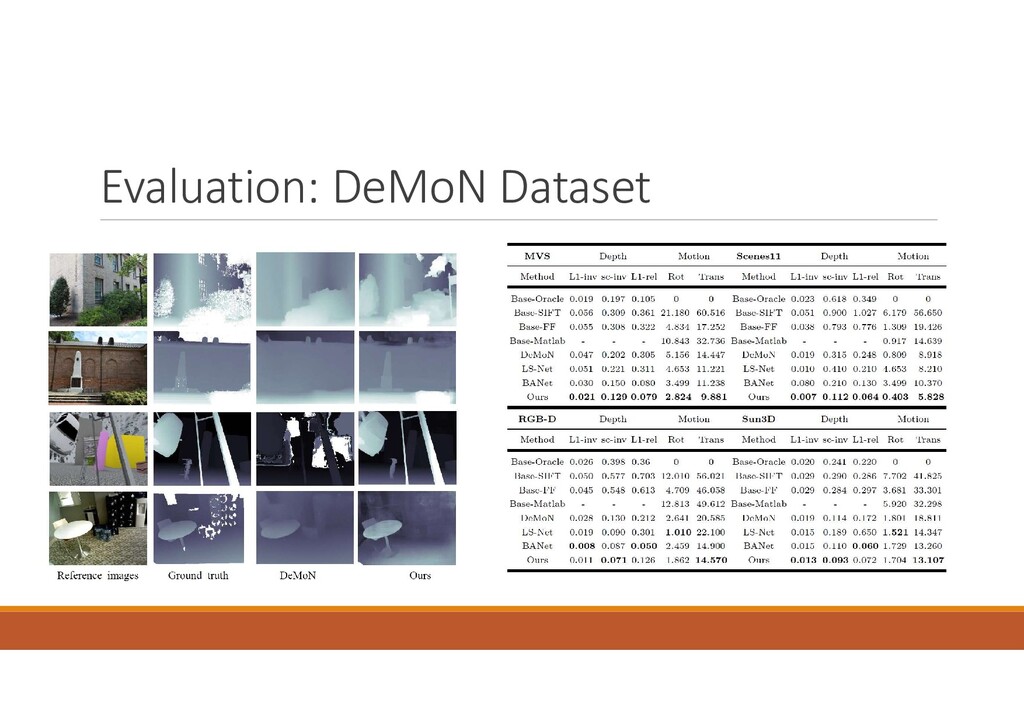
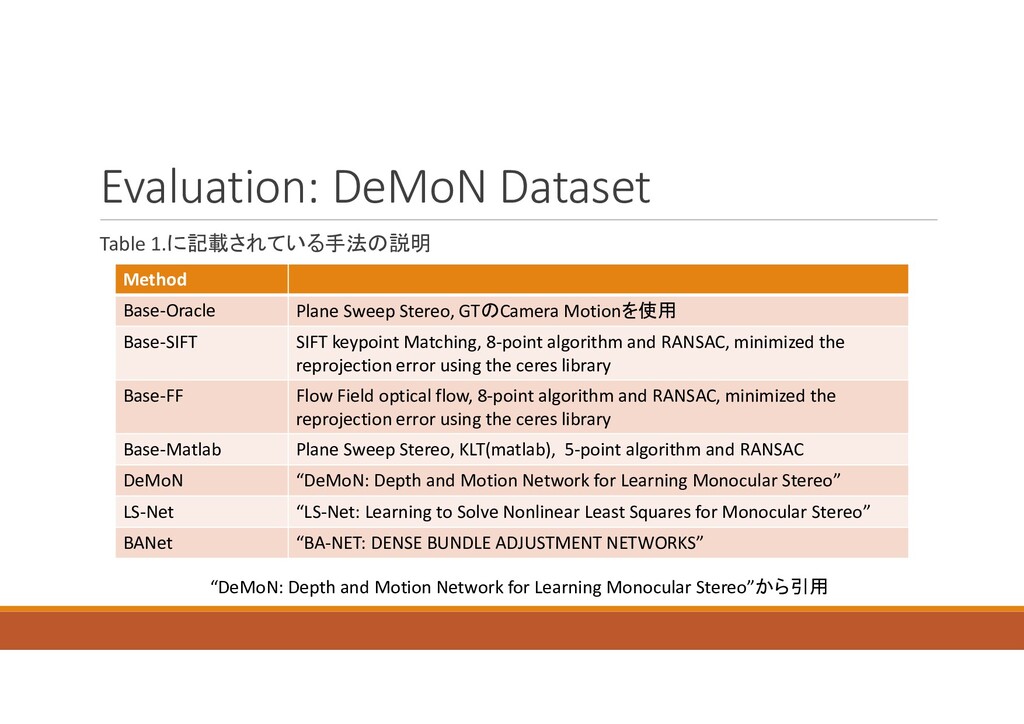
GTのCamera Motionを使用 Base-SIFT SIFT keypoint Matching, 8-point algorithm and RANSAC, minimized the reprojection error using the ceres library Base-FF Flow Field optical flow, 8-point algorithm and RANSAC, minimized the reprojection error using the ceres library Base-Matlab Plane Sweep Stereo, KLT(matlab), 5-point algorithm and RANSAC DeMoN “DeMoN: Depth and Motion Network for Learning Monocular Stereo” LS-Net “LS-Net: Learning to Solve Nonlinear Least Squares for Monocular Stereo” BANet “BA-NET: DENSE BUNDLE ADJUSTMENT NETWORKS” “DeMoN: Depth and Motion Network for Learning Monocular Stereo”から引用
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}