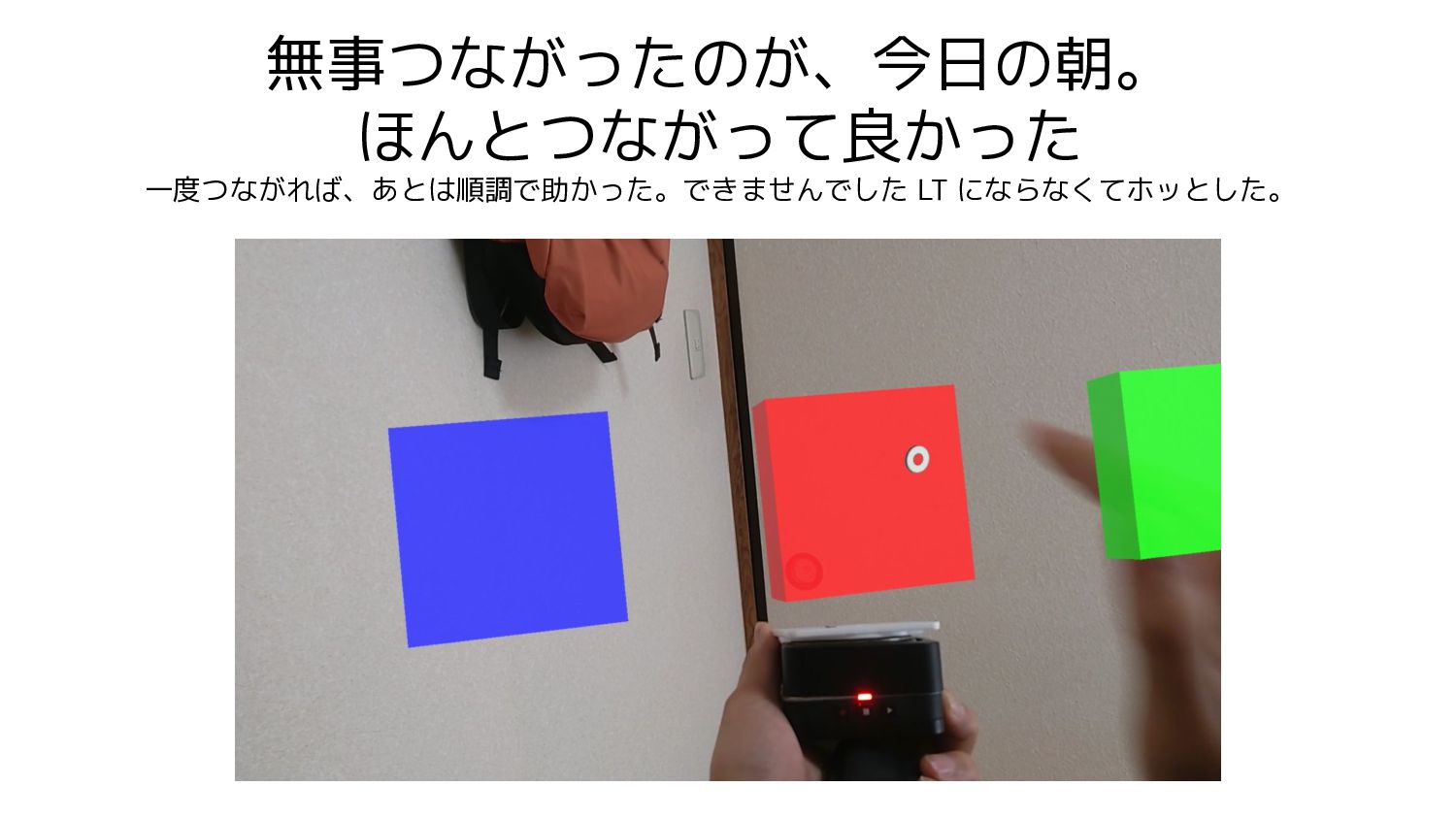
XRミーティング 20220316「HoloLens 2 と Keigan Motor を Bluetooth でつないでみる試行錯誤」の登壇資料です。
◆スライド内の素材は以下を使用させて頂いております。ありがとうございます!
・シルエットデザイン http://kage-design.com/
・human pictogram 2.0 http://pictogram2.com
・ICOOON MONO http://icooon-mono.com/
・Adobe Stock https://stock.adobe.com/jp
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}