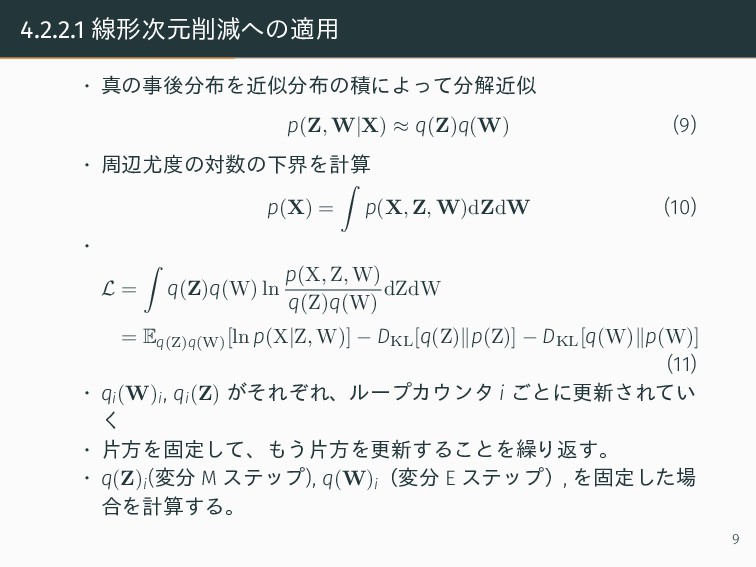
x で記述される。 p(X|Z, W) = N ∏ n=1 p (xn|zn, W) = N ∏ n=1 N ( xn|Wzn, σ2 x I ) (6) • Z は潜在変数なので、未観測の変数の集合であり、観測された値 ではない。 • 潜在変数の生成は独立なガウス分布に従うと仮定 p(Z) = N ∏ n=1 N (zn|0, I) (7) • 上記の仮定の生成分布のパラメータもガウス分布にしたがう と仮定 p(Z, W|X) ≈ q(Z)q(W) (8) 8
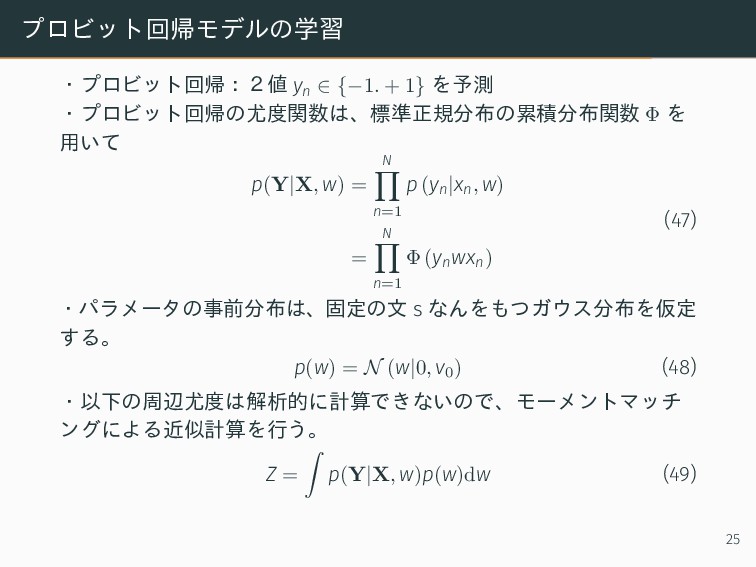
を 用いて p(Y|X, w) = N ∏ n=1 p (yn|xn, w) = N ∏ n=1 Φ (yn wxn) (47) ・パラメータの事前分布は、固定の文 s なんをもつガウス分布を仮定 する。 p(w) = N (w|0, v 0 ) (48) ・以下の周辺尤度は解析的に計算できないので、モーメントマッチ ングによる近似計算を行う。 Z = ∫ p(Y|X, w)p(w)dw (49) 25
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}