Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
物体追跡
Search
Masafumi Abeta
January 24, 2022
Science
360
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
物体追跡
社内勉強会で発表した資料です。
Masafumi Abeta
January 24, 2022
More Decks by Masafumi Abeta
See All by Masafumi Abeta
Pythonのパッケージマネージャー「uv」
abeta
1
450
GPTモデルでキャラクター設定する際の課題
abeta
0
390
GPTをLINEで使えるようにして布教した
abeta
0
220
【Nishika】プリント基板の電子部品検出
abeta
0
360
初心者向けChatGPT入門
abeta
0
290
GPT Short Talk
abeta
0
170
拡散モデルについて少しだけ
abeta
0
96
動的計画モデル
abeta
0
210
特徴量記述
abeta
0
220
Other Decks in Science
See All in Science
医療 LLM ベンチマークの現在地:多面的評価 と日本ローカライズ
analokmaus
1
600
AkarengaLT vol.41
hashimoto_kei
1
150
Snowflake HCLS Meet Upヘルスケアユーザー会紹介
ktatsuya
0
110
KISHIMOTO Atsuo
genomethica
0
170
Inside the Mind of an LLM
baggiponte
0
200
ITTF卓球世界ランキングのポイント比を用いた試合結果予測モデルの性能評価 / Performance evaluation of match result prediction models using the point ratio of the ITTF Table Tennis World Ranking
konakalab
0
140
Wet Active Matter
rajeshrinet
0
120
やるべきときにMLをやる AIエージェント開発
fufufukakaka
2
1.5k
「念のためのログ保存」を組織全体でやめるためのポリシーと仕組み作り
i2tsuki
4
300
水耕栽培:古代の知恵から宇宙農業まで
grow_design_lab
0
160
HajimetenoLT vol.17
hashimoto_kei
1
240
Endel Tulvingとエピソード記憶
rmaruy
0
150
Featured
See All Featured
Bash Introduction
62gerente
615
220k
Amusing Abliteration
ianozsvald
1
230
Technical Leadership for Architectural Decision Making
baasie
3
440
The innovator’s Mindset - Leading Through an Era of Exponential Change - McGill University 2025
jdejongh
PRO
1
220
Groundhog Day: Seeking Process in Gaming for Health
codingconduct
0
250
StorybookのUI Testing Handbookを読んだ
zakiyama
31
6.8k
Building Flexible Design Systems
yeseniaperezcruz
330
40k
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
Exploring anti-patterns in Rails
aemeredith
3
450
Efficient Content Optimization with Google Search Console & Apps Script
katarinadahlin
PRO
1
730
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
Transcript
XX University 物体追跡 2022.01.24 Abeta
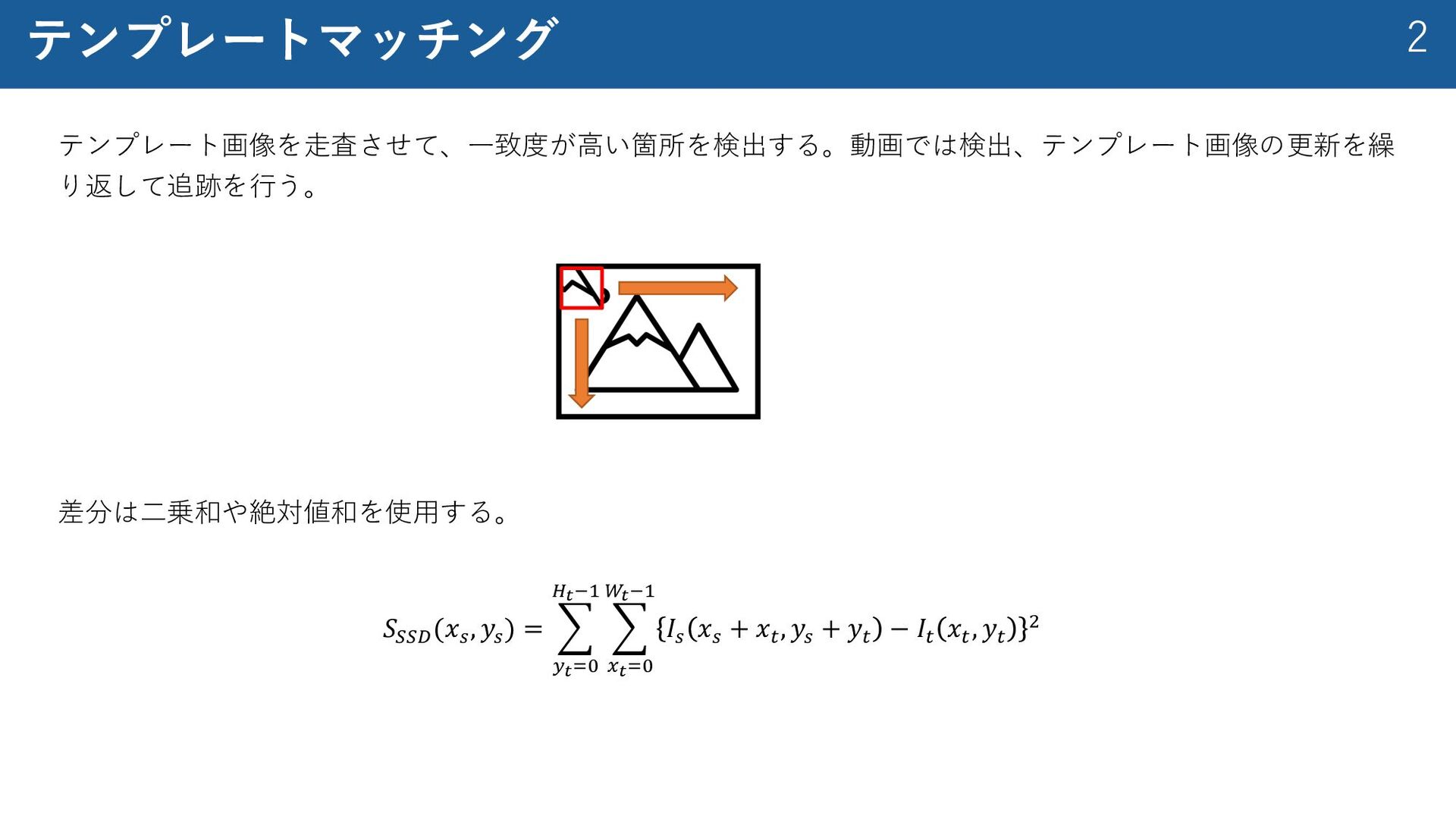
2 テンプレートマッチング テンプレート画像を⾛査させて、⼀致度が⾼い箇所を検出する。動画では検出、テンプレート画像の更新を繰 り返して追跡を⾏う。 𝑆!!" (𝑥# , 𝑦# ) =
( $!%& '!() ( *!%& +!() 𝐼# 𝑥# + 𝑥, , 𝑦# + 𝑦, − 𝐼, 𝑥, , 𝑦, - 差分は⼆乗和や絶対値和を使⽤する。
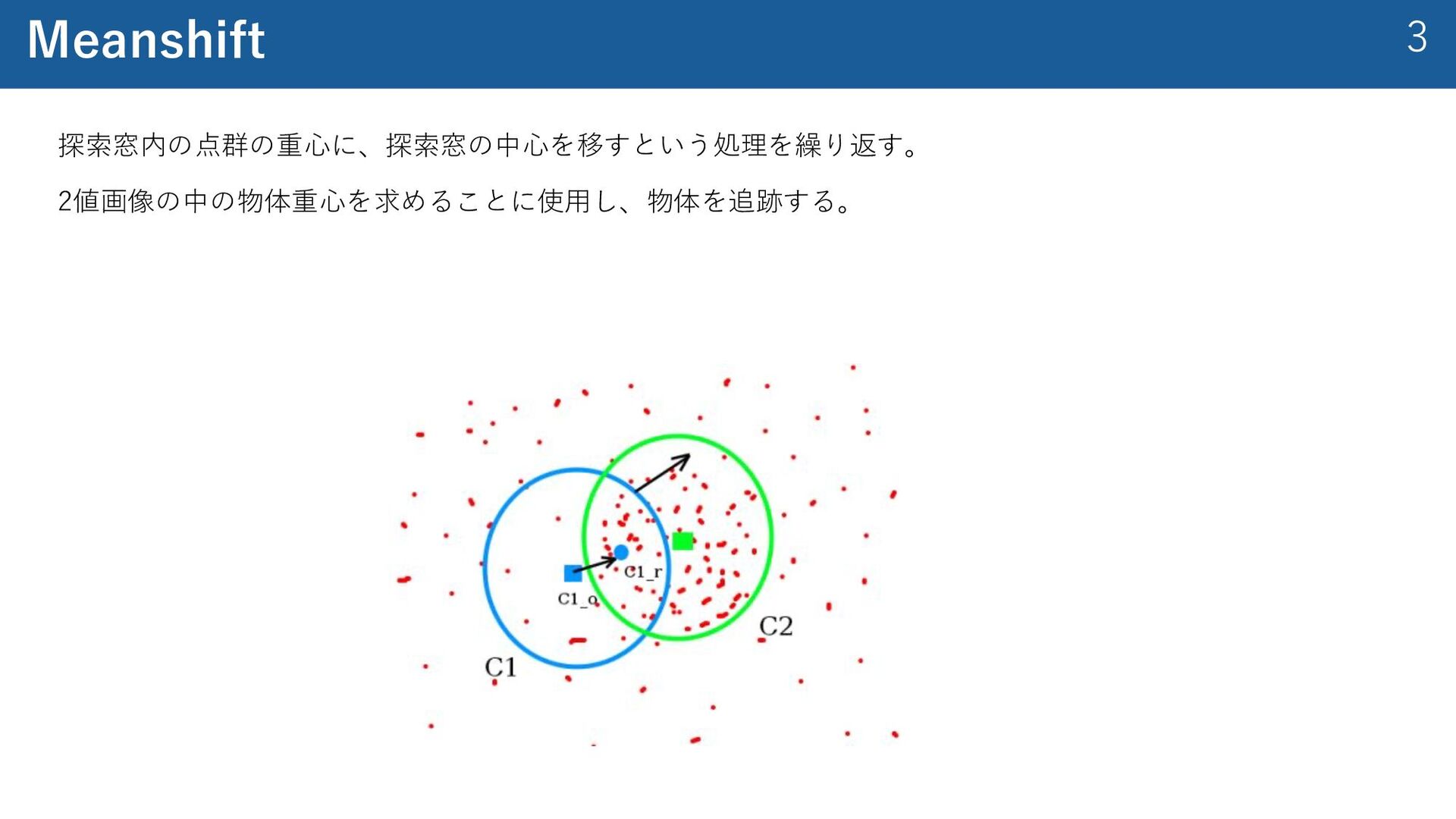
3 Meanshift 探索窓内の点群の重⼼に、探索窓の中⼼を移すという処理を繰り返す。 2値画像の中の物体重⼼を求めることに使⽤し、物体を追跡する。
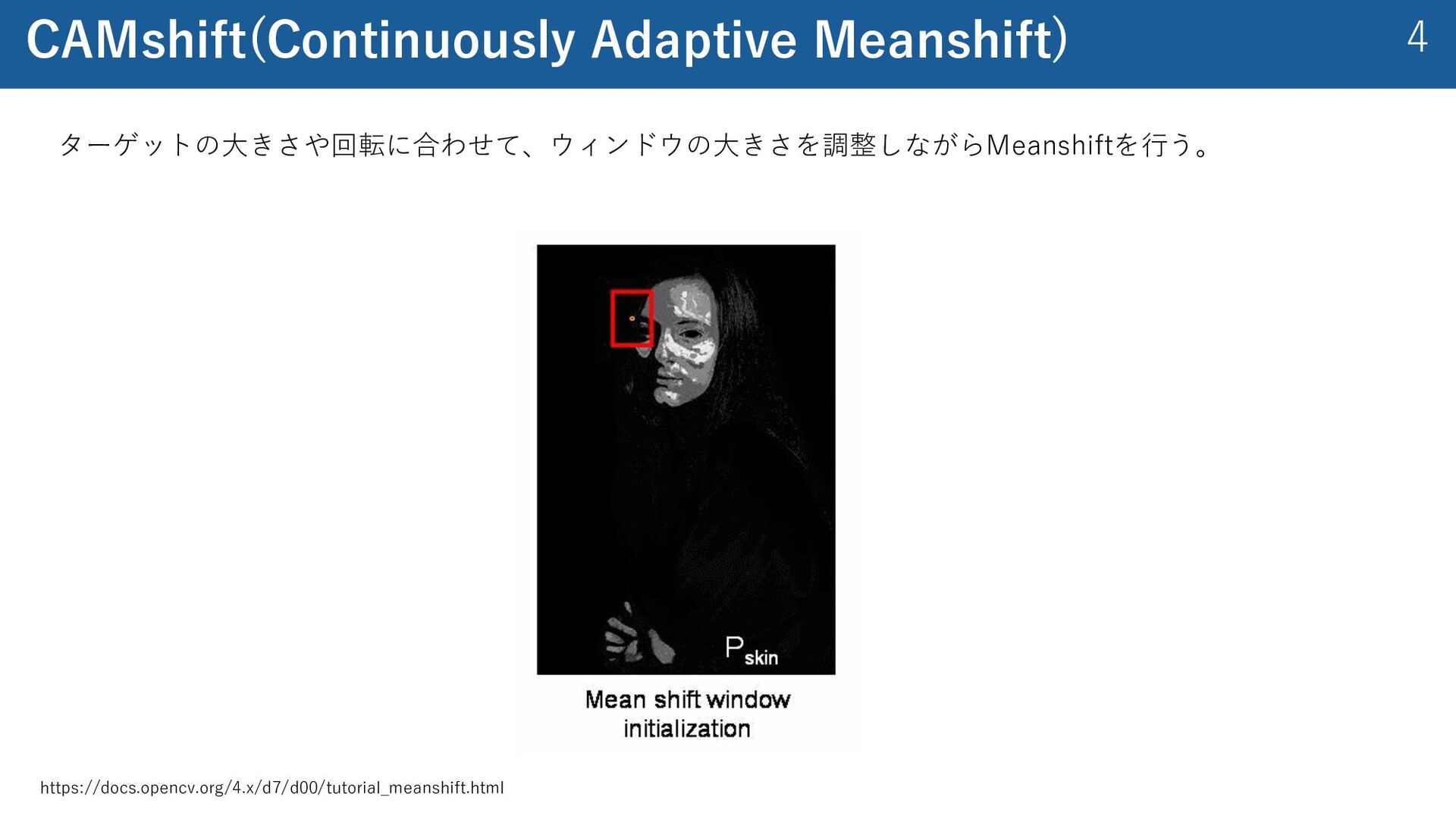
4 CAMshift(Continuously Adaptive Meanshift) ターゲットの⼤きさや回転に合わせて、ウィンドウの⼤きさを調整しながらMeanshiftを⾏う。 https://docs.opencv.org/4.x/d7/d00/tutorial_meanshift.html
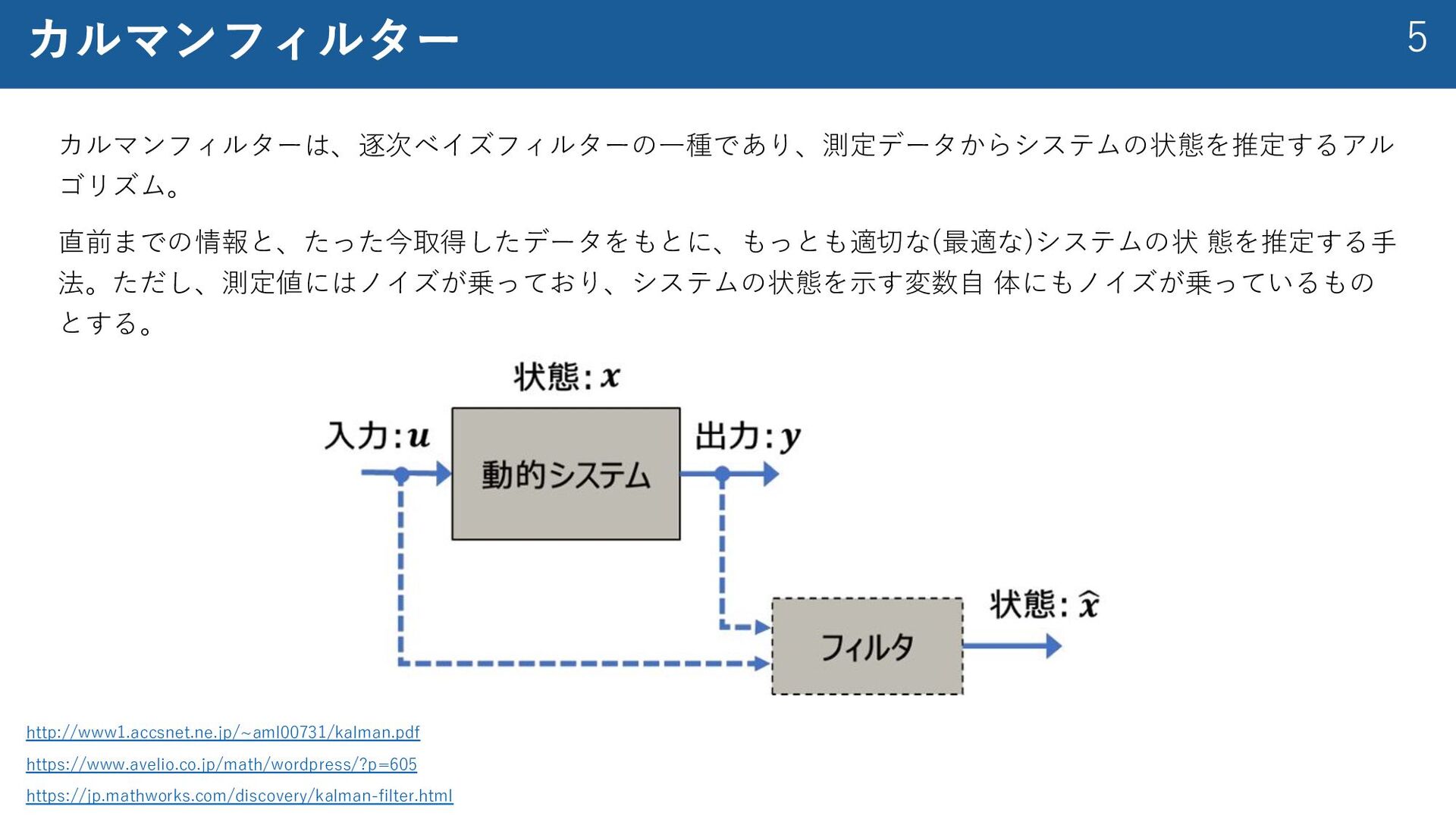
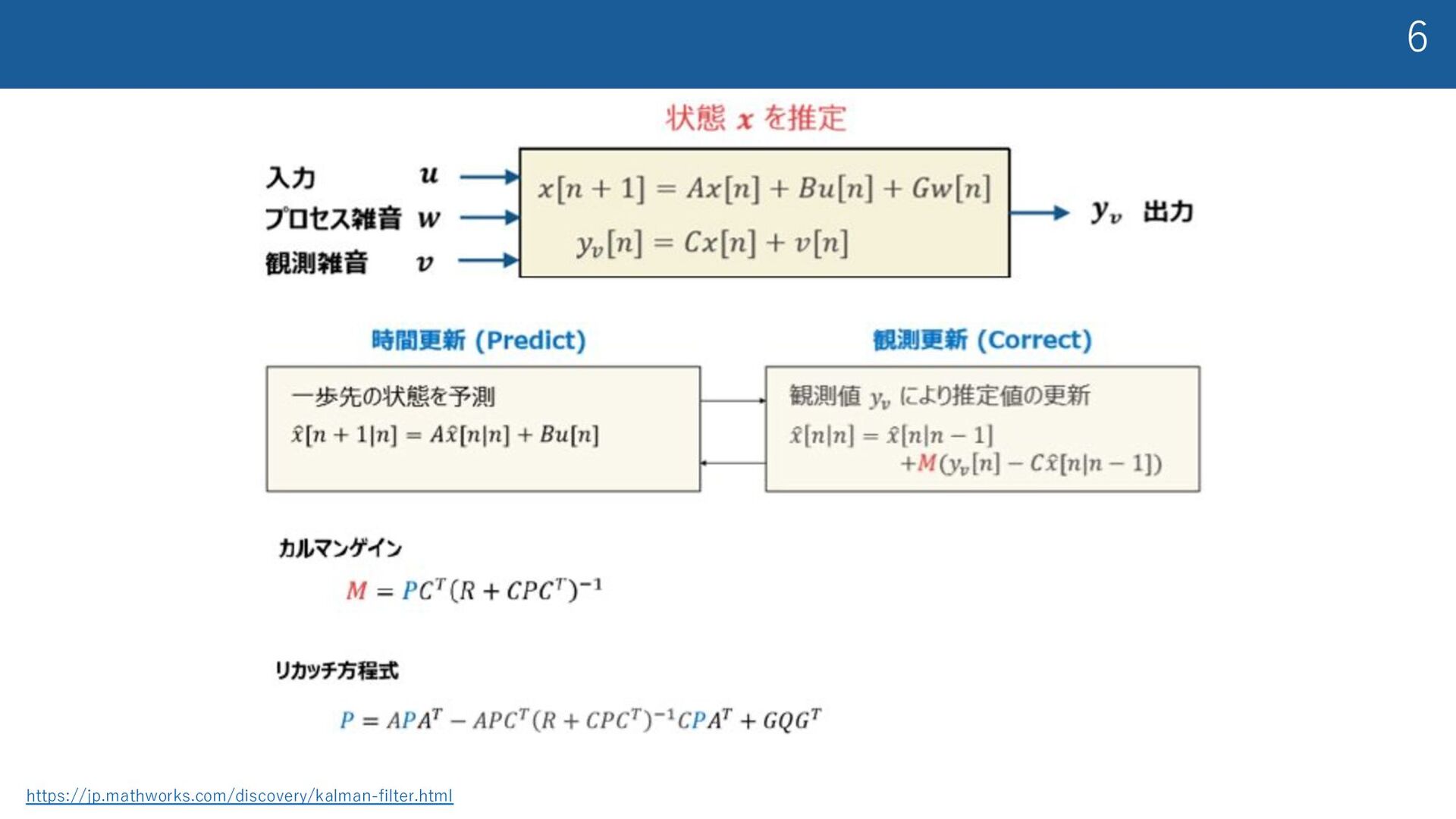
5 カルマンフィルター カルマンフィルターは、逐次ベイズフィルターの⼀種であり、測定データからシステムの状態を推定するアル ゴリズム。 直前までの情報と、たった今取得したデータをもとに、もっとも適切な(最適な)システムの状 態を推定する⼿ 法。ただし、測定値にはノイズが乗っており、システムの状態を⽰す変数⾃ 体にもノイズが乗っているもの とする。 https://jp.mathworks.com/discovery/kalman-filter.html
https://www.avelio.co.jp/math/wordpress/?p=605 http://www1.accsnet.ne.jp/~aml00731/kalman.pdf
6 https://jp.mathworks.com/discovery/kalman-filter.html
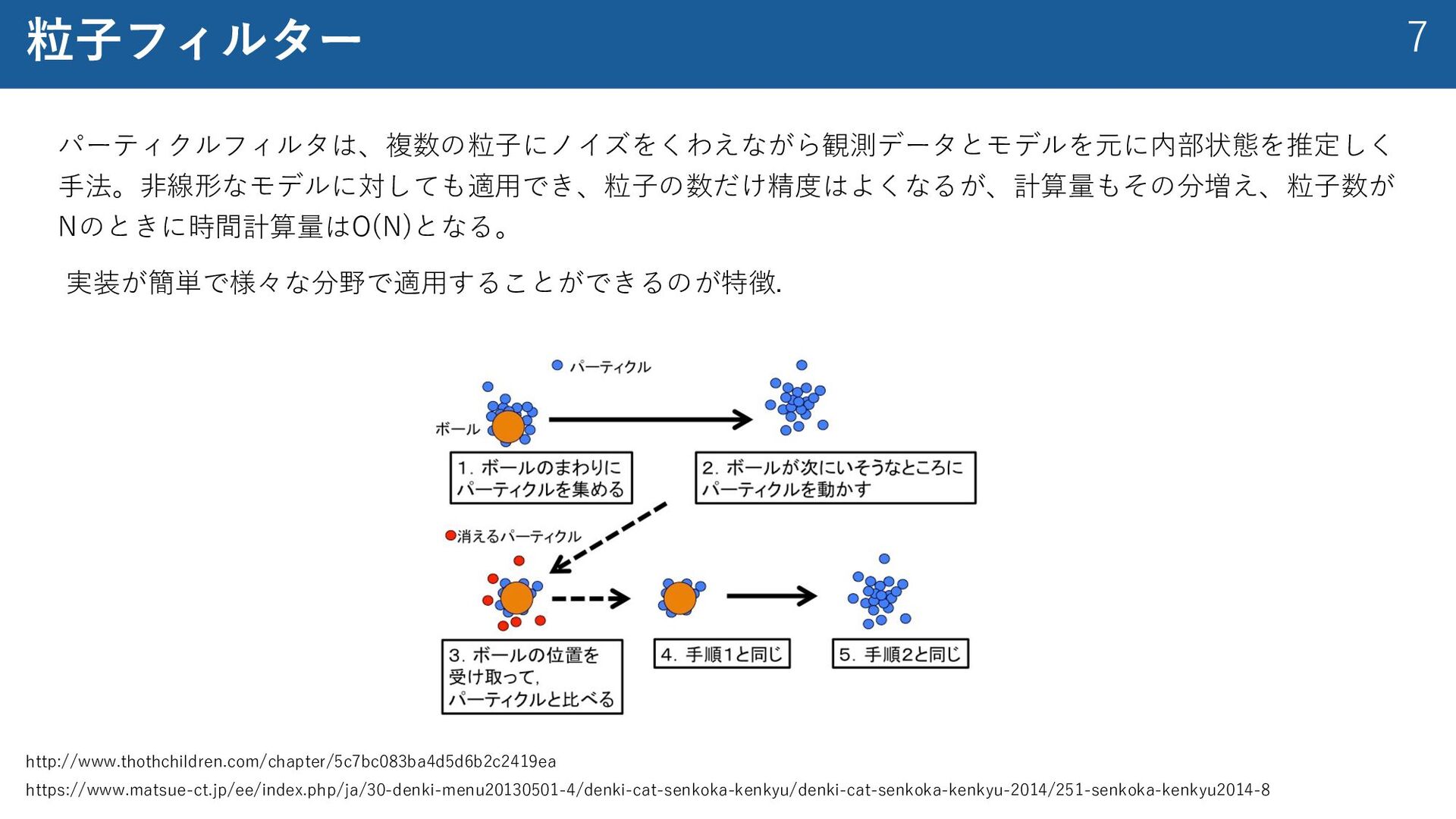
7 粒⼦フィルター パーティクルフィルタは、複数の粒⼦にノイズをくわえながら観測データとモデルを元に内部状態を推定しく ⼿法。⾮線形なモデルに対しても適⽤でき、粒⼦の数だけ精度はよくなるが、計算量もその分増え、粒⼦数が Nのときに時間計算量はO(N)となる。 実装が簡単で様々な分野で適⽤することができるのが特徴. https://www.matsue-ct.jp/ee/index.php/ja/30-denki-menu20130501-4/denki-cat-senkoka-kenkyu/denki-cat-senkoka-kenkyu-2014/251-senkoka-kenkyu2014-8 http://www.thothchildren.com/chapter/5c7bc083ba4d5d6b2c2419ea
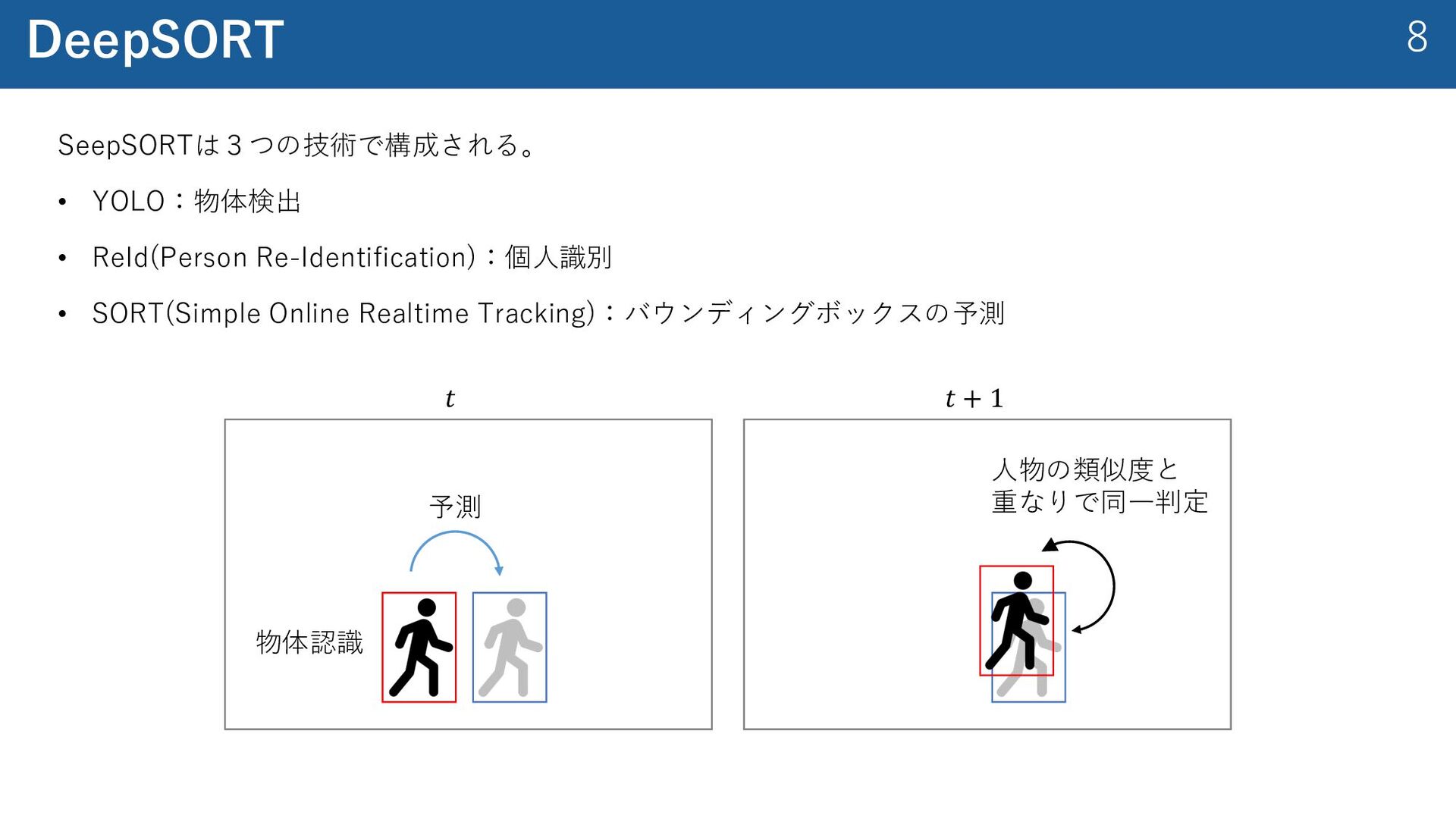
8 DeepSORT SeepSORTは3つの技術で構成される。 • YOLO:物体検出 • ReId(Person Re-Identification):個⼈識別 • SORT(Simple
Online Realtime Tracking):バウンディングボックスの予測 予測 𝑡 𝑡 + 1 物体認識 ⼈物の類似度と 重なりで同⼀判定
9 参考⽂献 • 中村恭之, ⼩枝正直, 上⽥悦⼦, 『OpenCVによるコンピュータビジョン・機械学習⼊⾨』, 講談社, 2017
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}