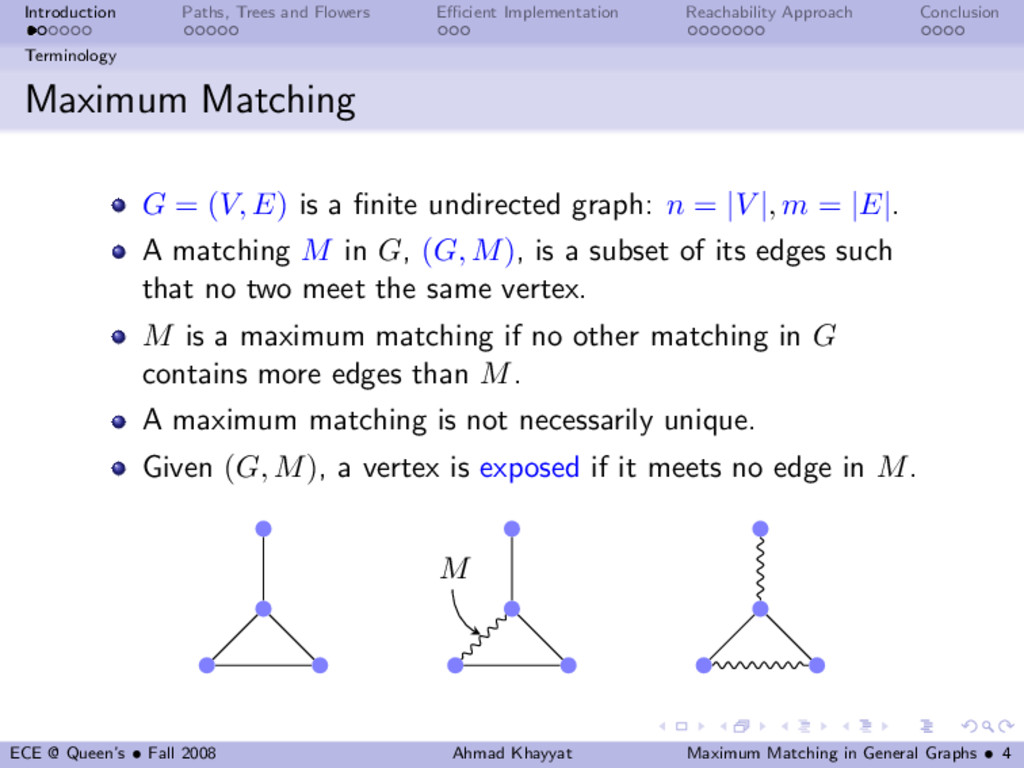
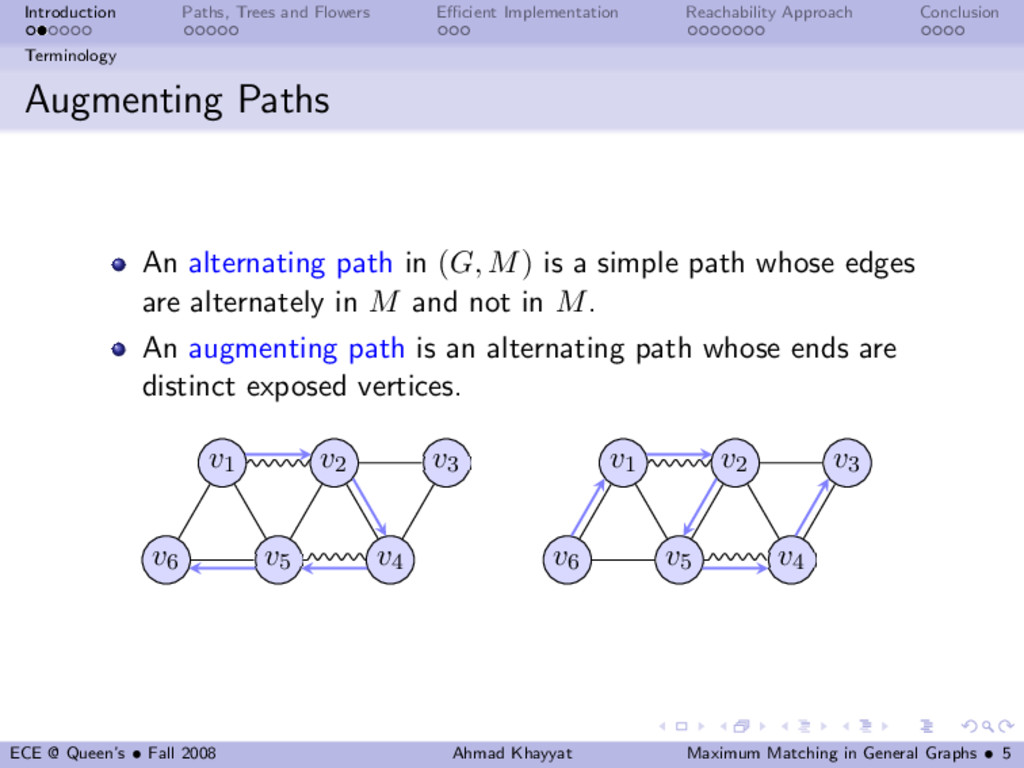
A matching M in G is a subset of its edges such that no two meet the same vertex. A maximum matching is a matching of maximum cardinality. That is, M is a maximum matching if no matching on G contains more edges than M . A maximum matching is not necessarily unique.
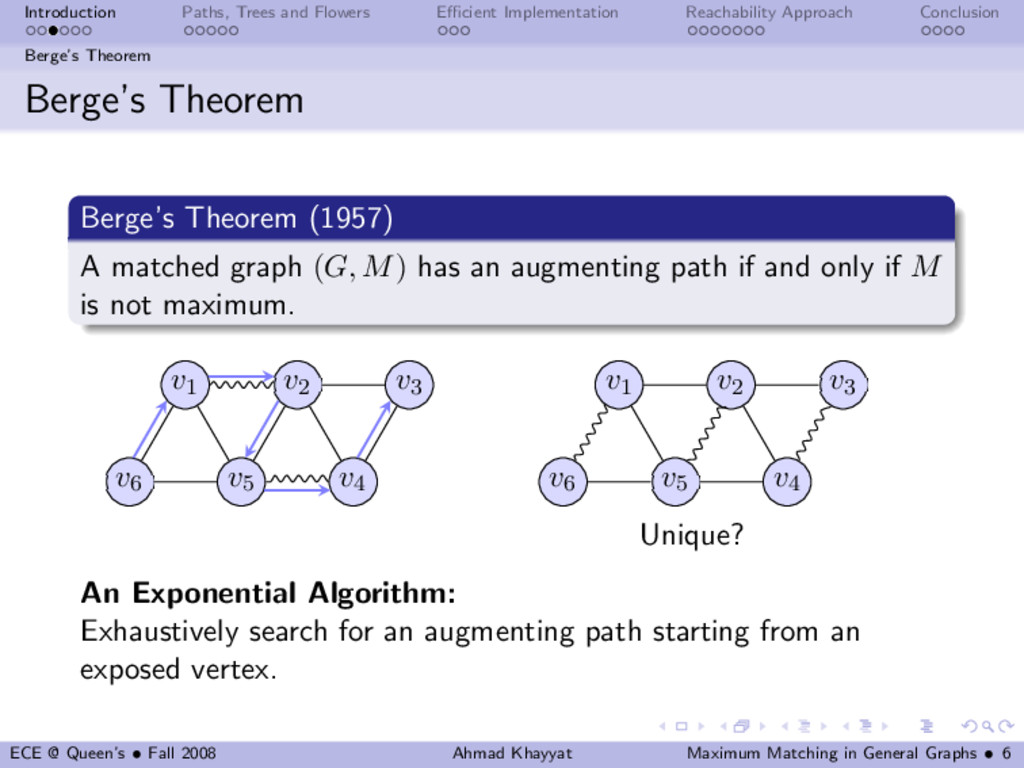
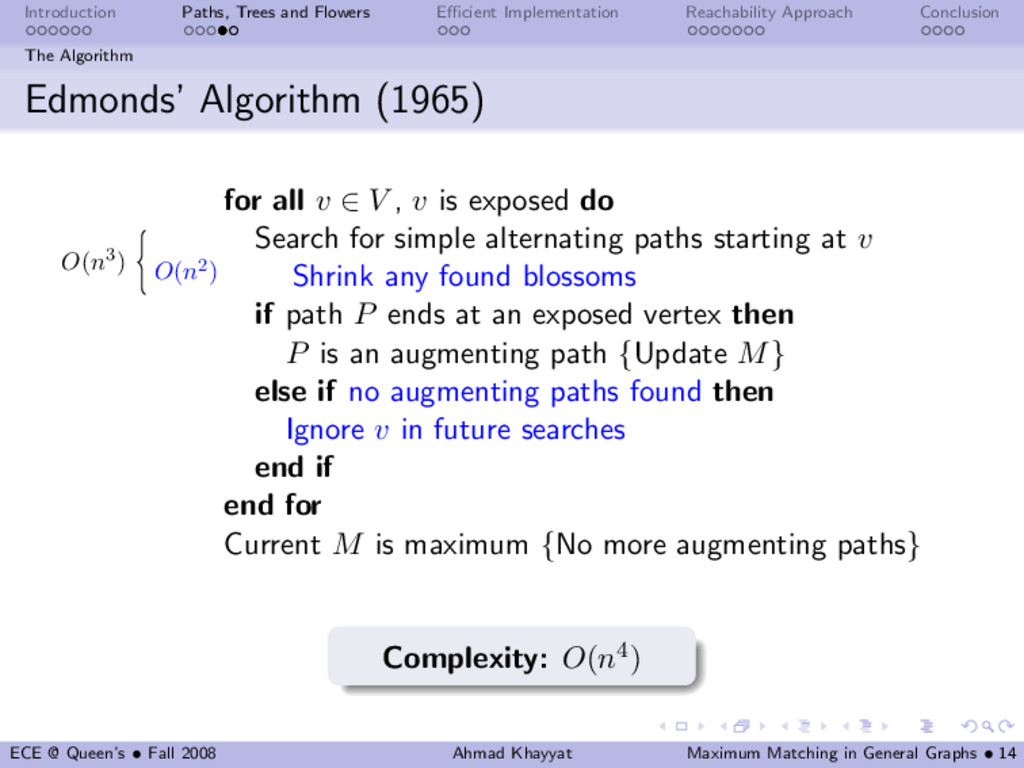
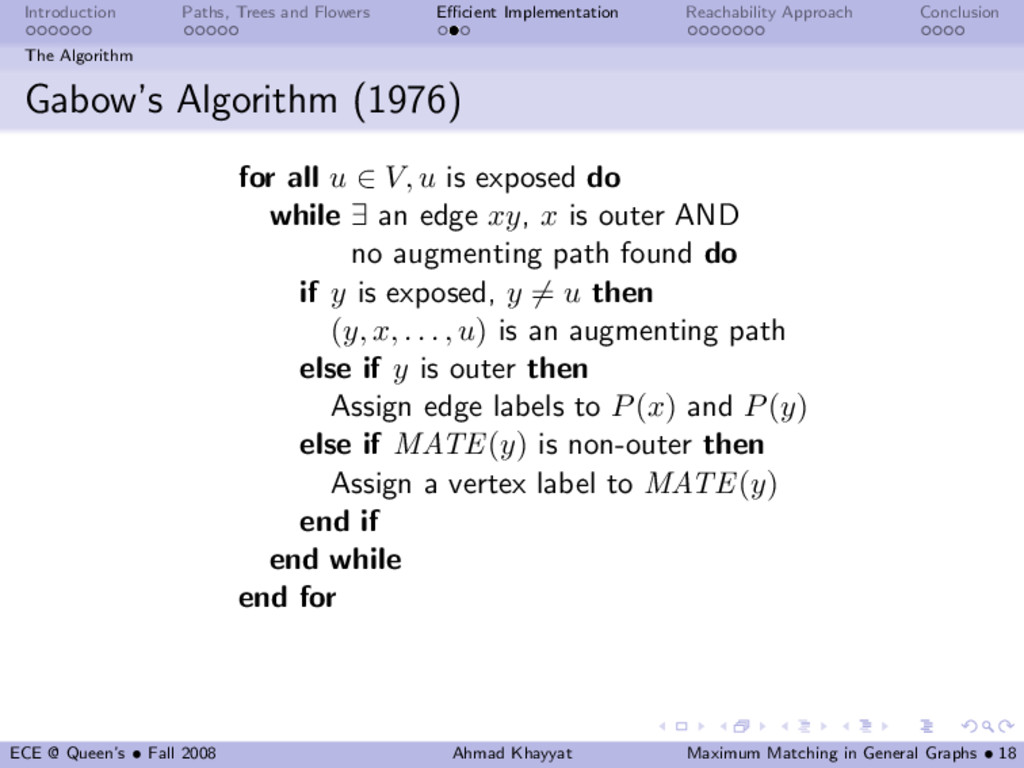
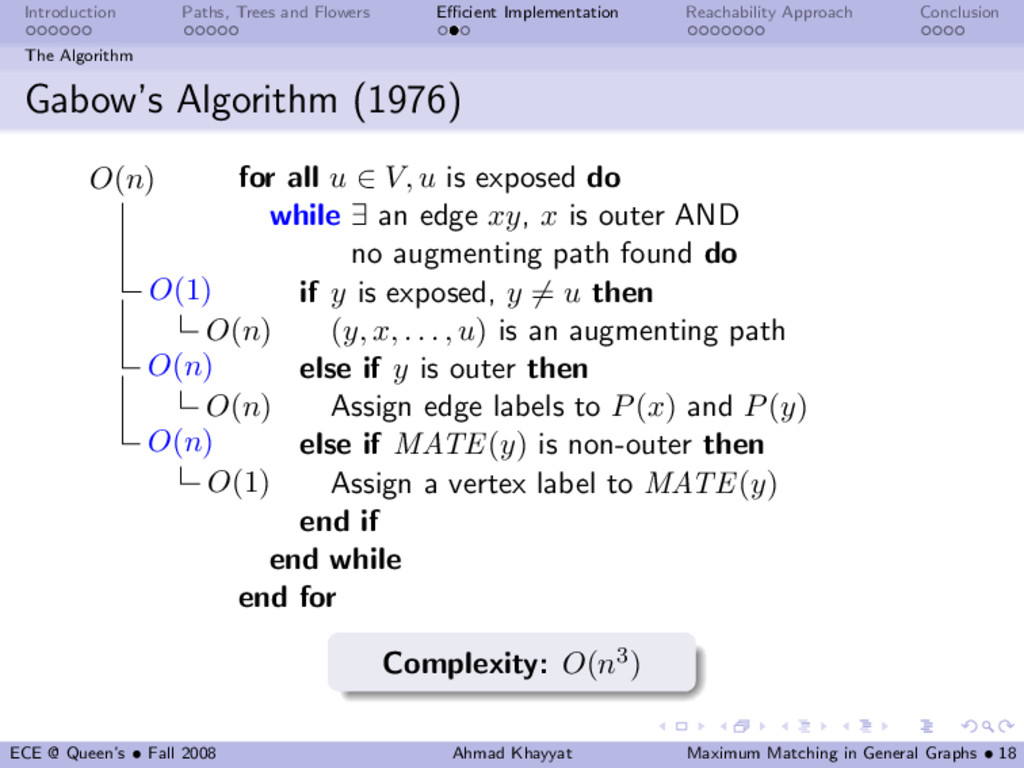
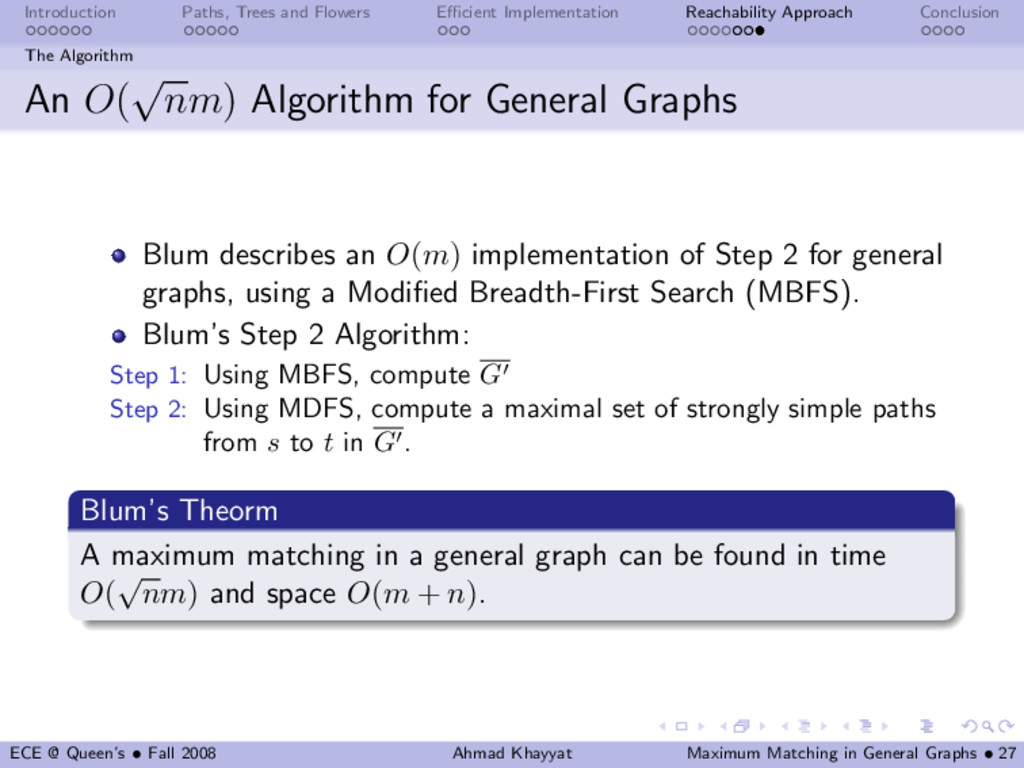
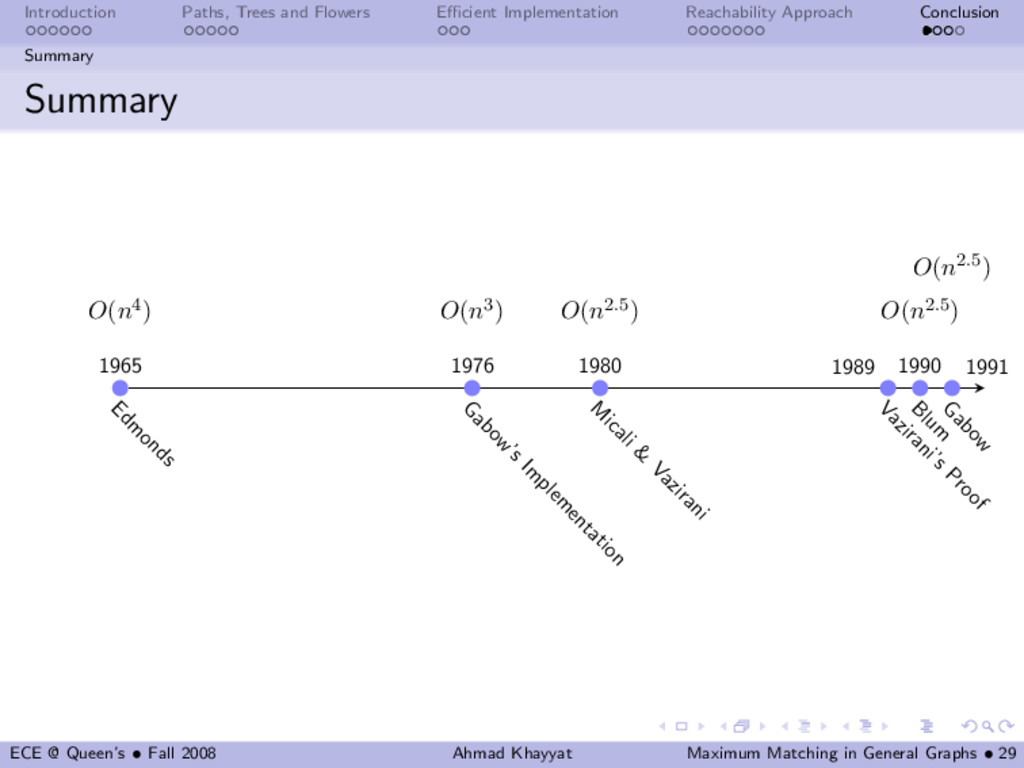
Berge proposed constructing a maximum matching by exhaustively searching for augmenting paths, which Edmonds argues is of exponential order. Edmonds then proposed the first polynomial time maximum matching algorithm using the same augmenting path method. His algorithm is O(n 4 ). Gabow then proposed a “careful implementation” of Edmonds algorithm that improves the algorithm time to O(n 3 ). Vazirani, Blum, and Gabow used different techniques to achieve the best known algorithms for solving the maximum matching problem for general non-bipartite graphs. The three algorithms are of complexity O(m n), which gives O(n 2.5) for dense graphs.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}