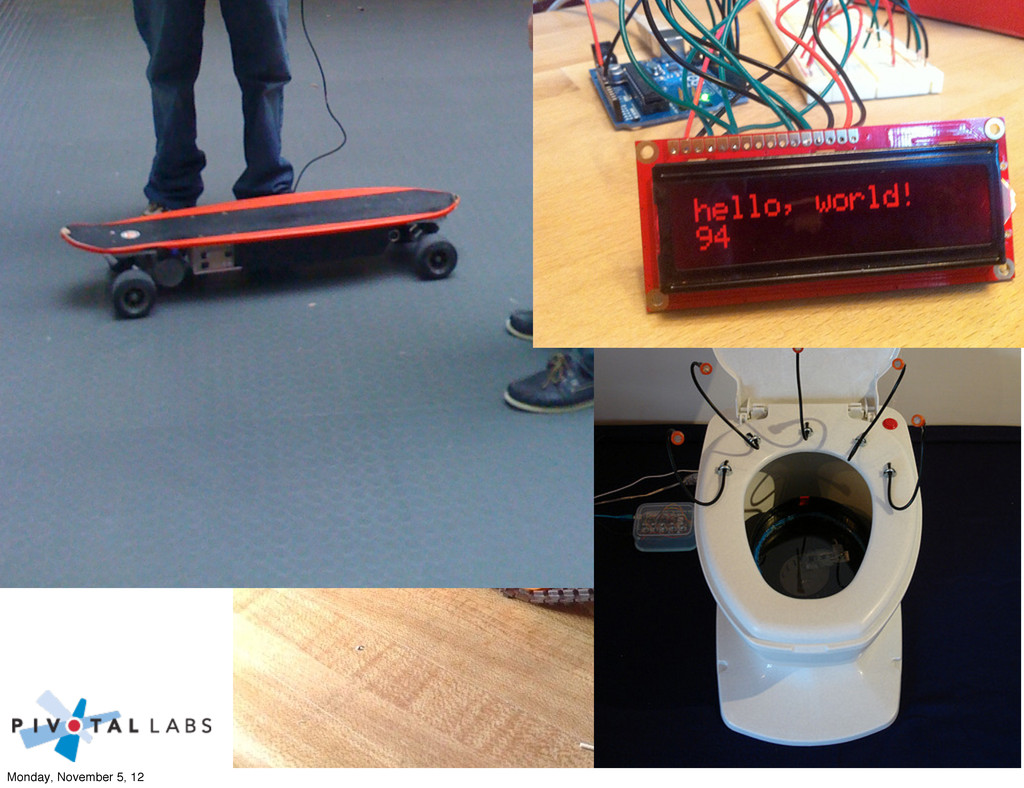
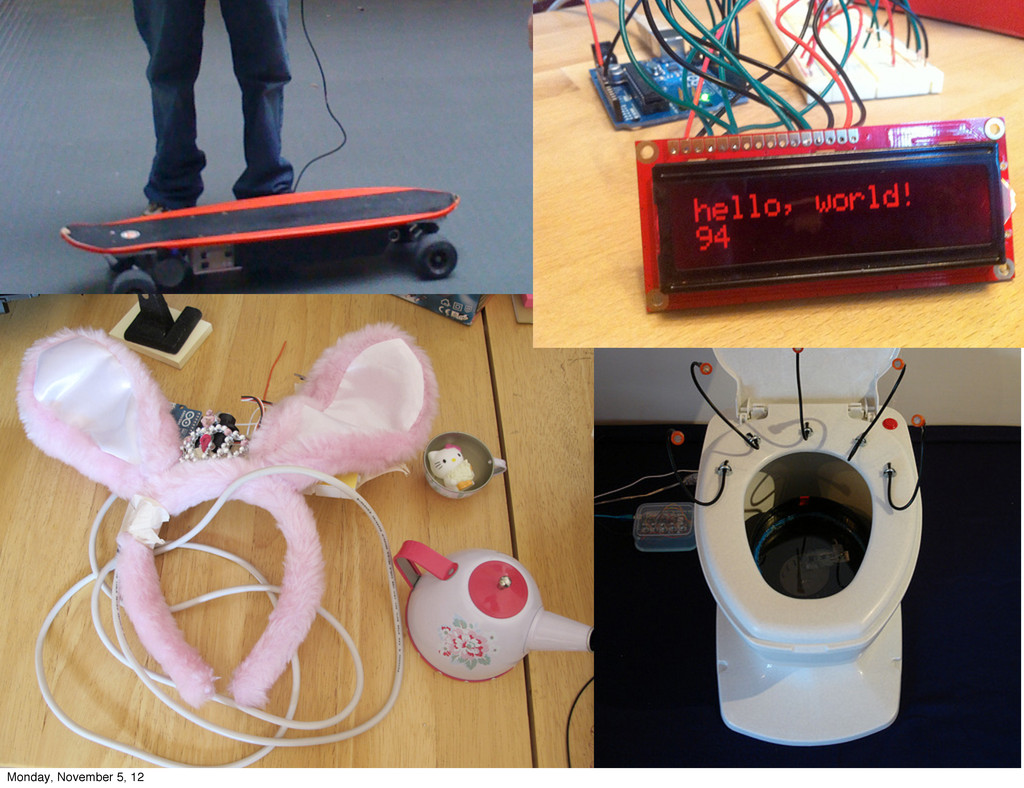
Writing software is great, websites, applications, and scripts are things we interact with every day. What about writing software that we can interact with in the physical world? From automated sprinkler systems that turn off when you pull into your drive way, to scoreboards at the company foosball table physical computing opens a door for the innovator inside every software engineer.
It's too hard
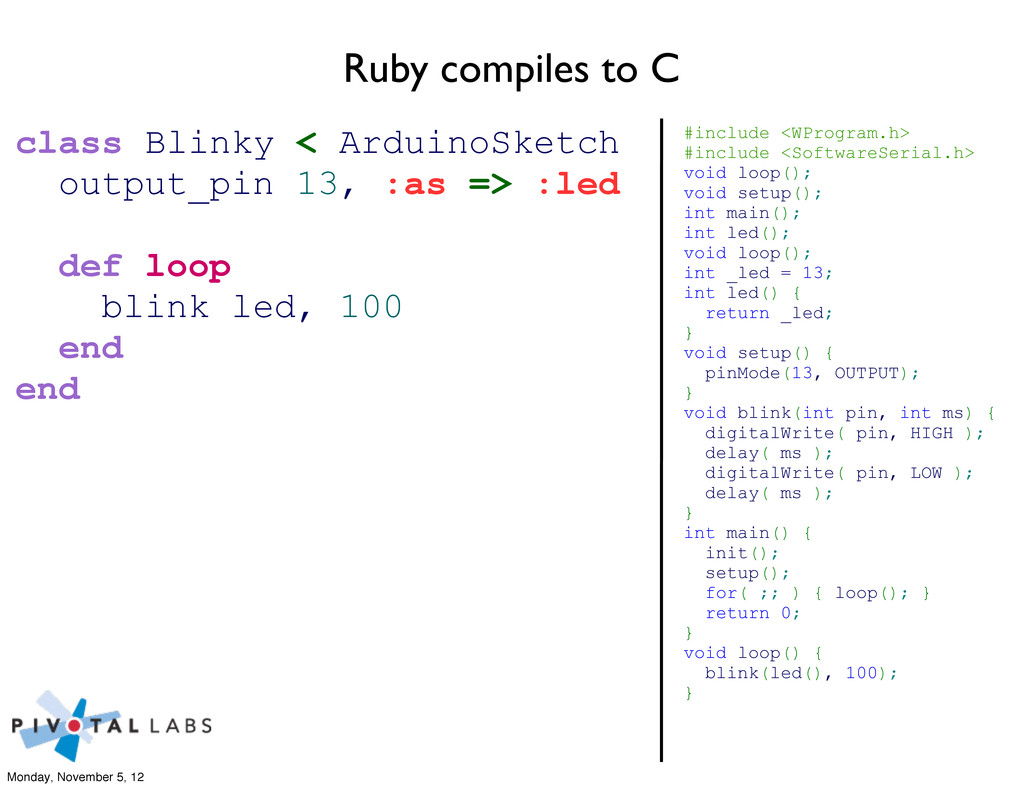
Not true, there are amazing libraries and compilers that let us write software for Arduinos in the best language, Ruby. Think about it no C, no headers, and no static types, just plain old ruby. That is a good deal.
In this talk I will go over a few of the most popular Ruby libraries for interacting with an Arduino, talk about some basics of each library and then spend time on how these libraries and Arduino can interact to create applications that respond in the physical world. There will be t-shirts shot from a robotic cannon.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![def initialize(options={}) @data_callbacks = [] @board.add_analog_hardware(self) @board.start_read end def update(data)](https://files.speakerdeck.com/presentations/5098572bc5f78d0002010edb/slide_73.jpg){kind=link}
{kind=link}
{kind=link}
![def step_cc digital_write(Board::HIGH, pins[:dir]) digital_write(Board::HIGH, pins[:step]) digital_write(Board::LOW, pins[:step]) end def](https://files.speakerdeck.com/presentations/5098572bc5f78d0002010edb/slide_76.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}