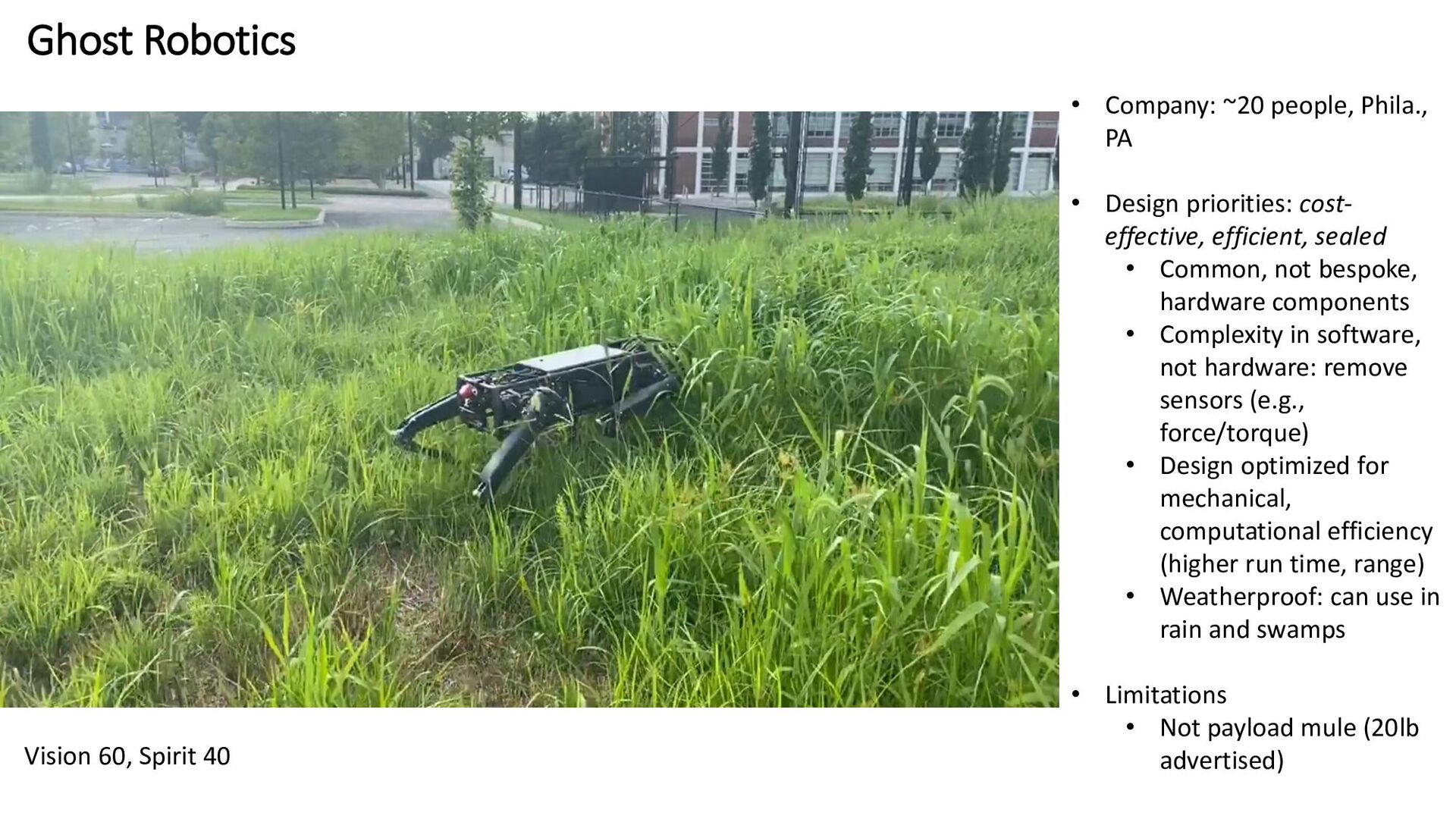
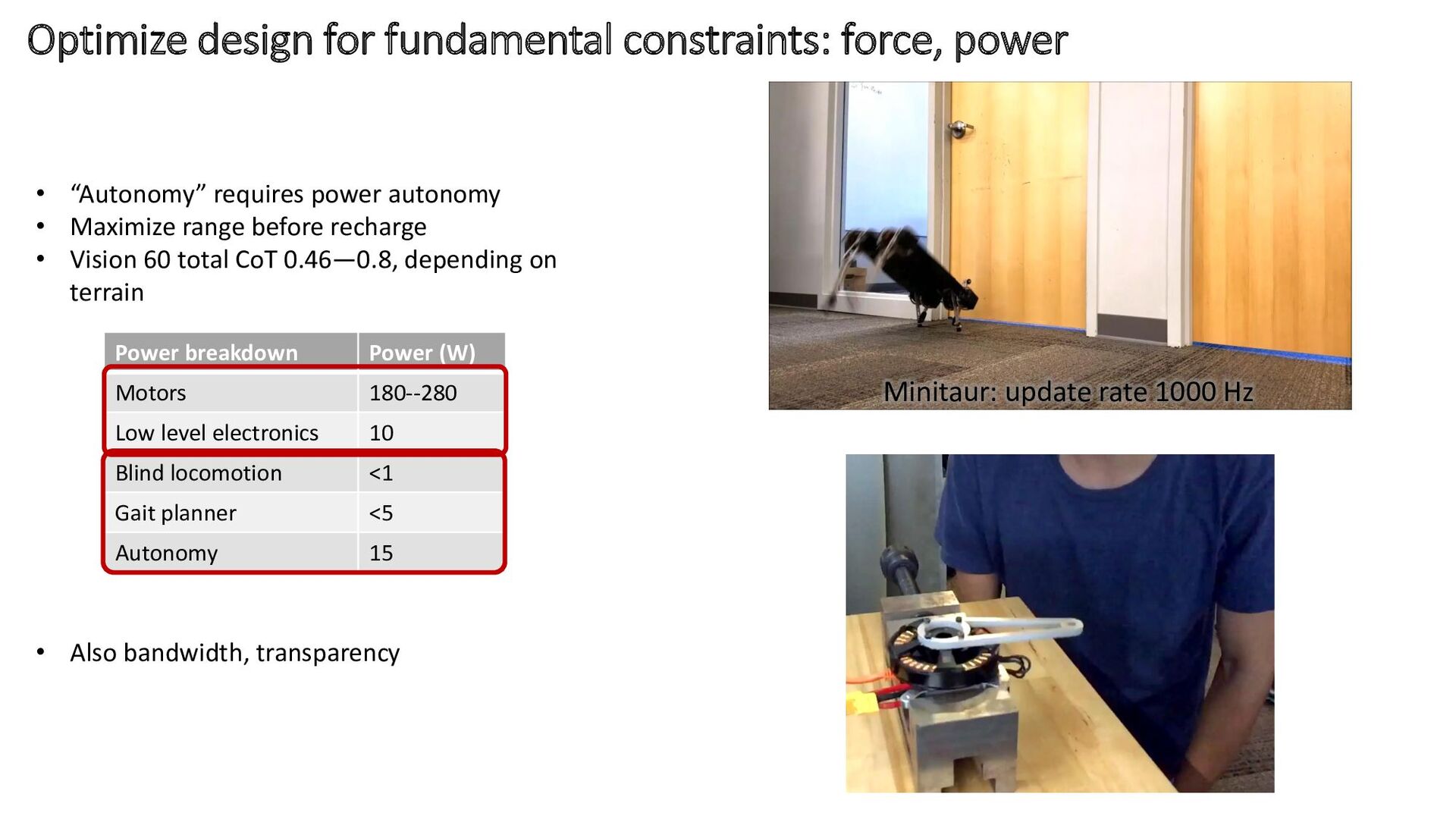
Phila., PA • Design priorities: cost- effective, efficient, sealed • Common, not bespoke, hardware components • Complexity in software, not hardware: remove sensors (e.g., force/torque) • Design optimized for mechanical, computational efficiency (higher run time, range) • Weatherproof: can use in rain and swamps • Limitations • Not payload mule (20lb advertised)
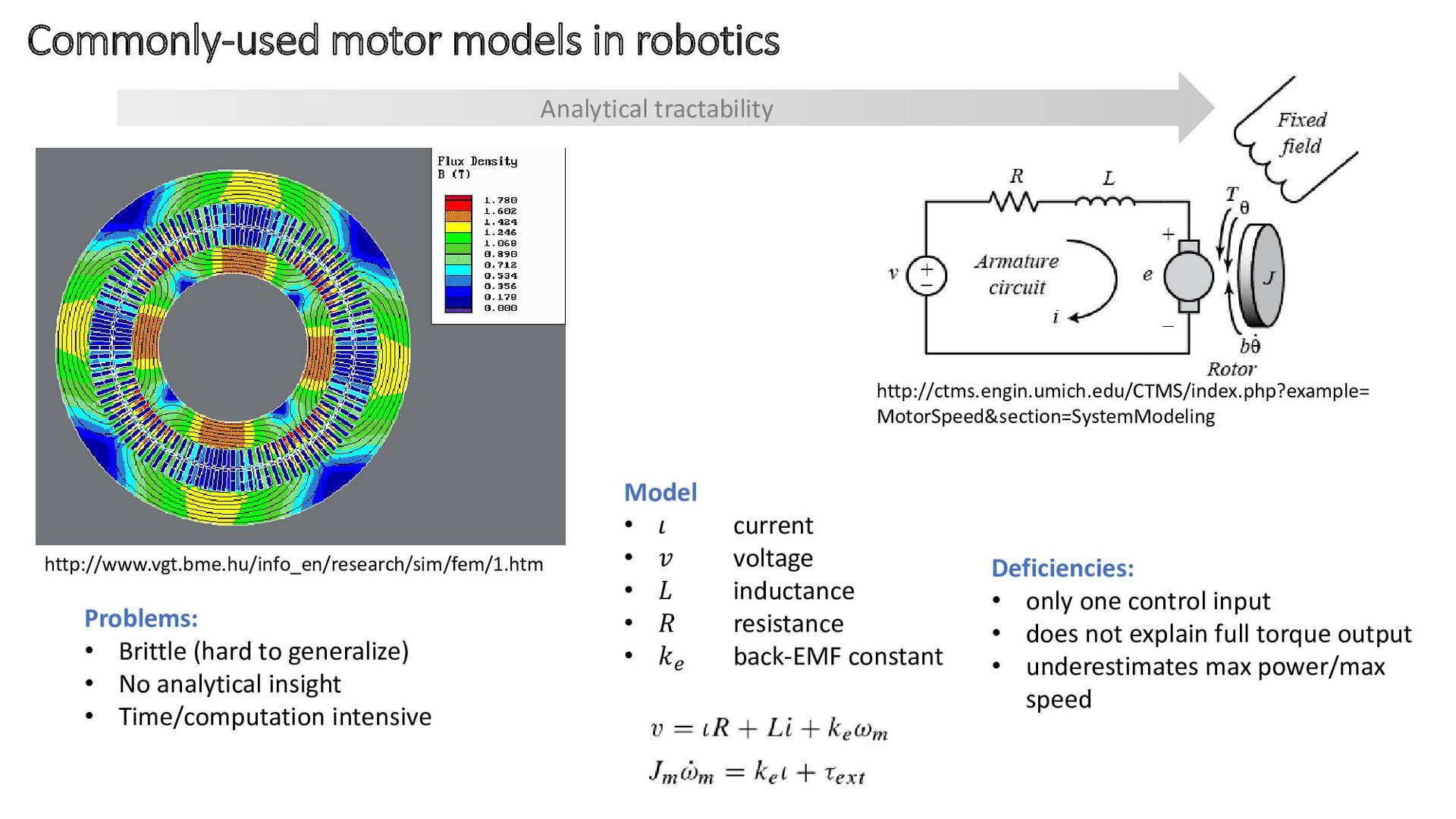
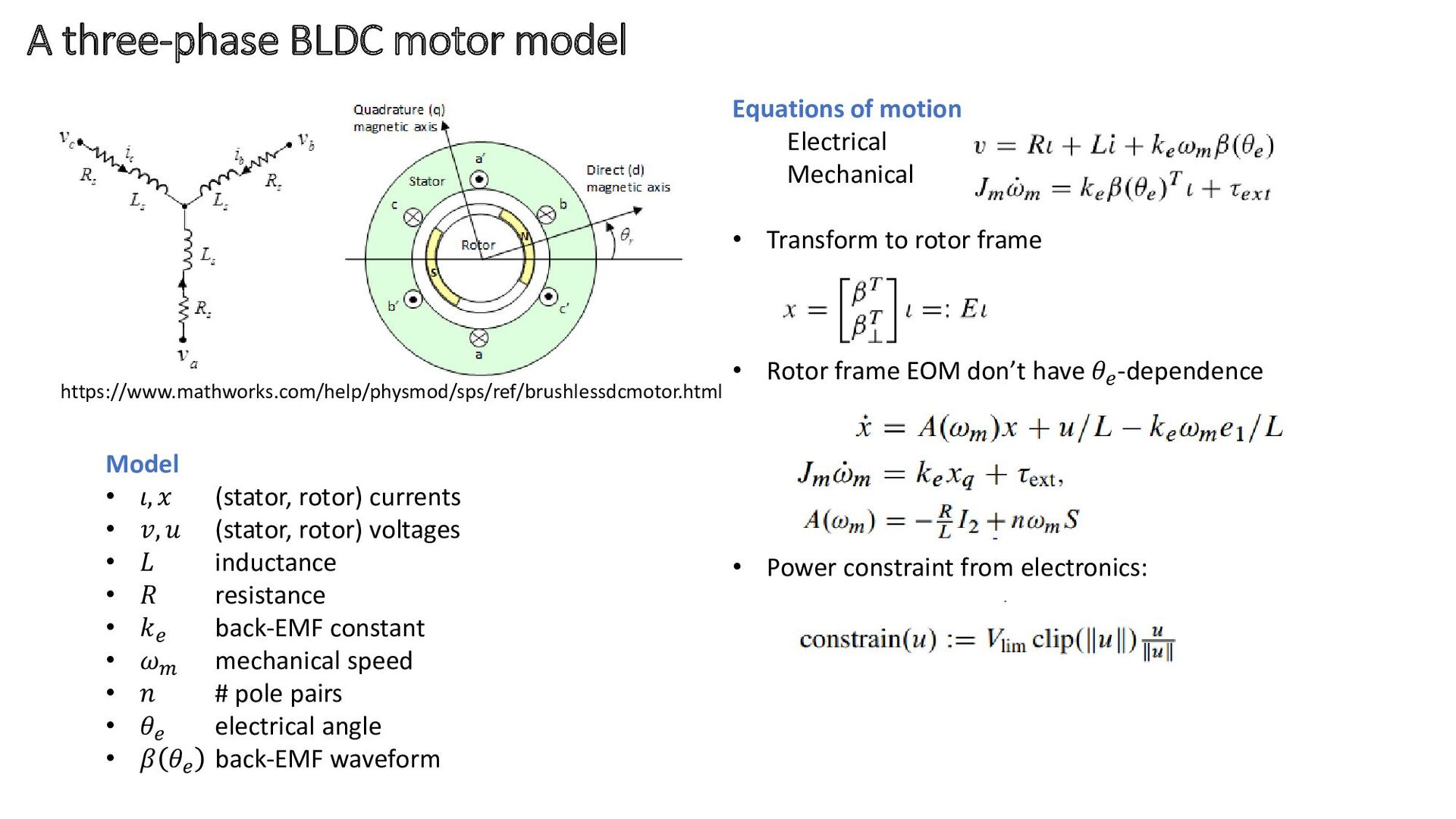
only one control input • does not explain full torque output • underestimates max power/max speed Model • 𝜄 current • 𝑣 voltage • 𝐿 inductance • 𝑅 resistance • 𝑘𝑒 back-EMF constant Problems: • Brittle (hard to generalize) • No analytical insight • Time/computation intensive Analytical tractability
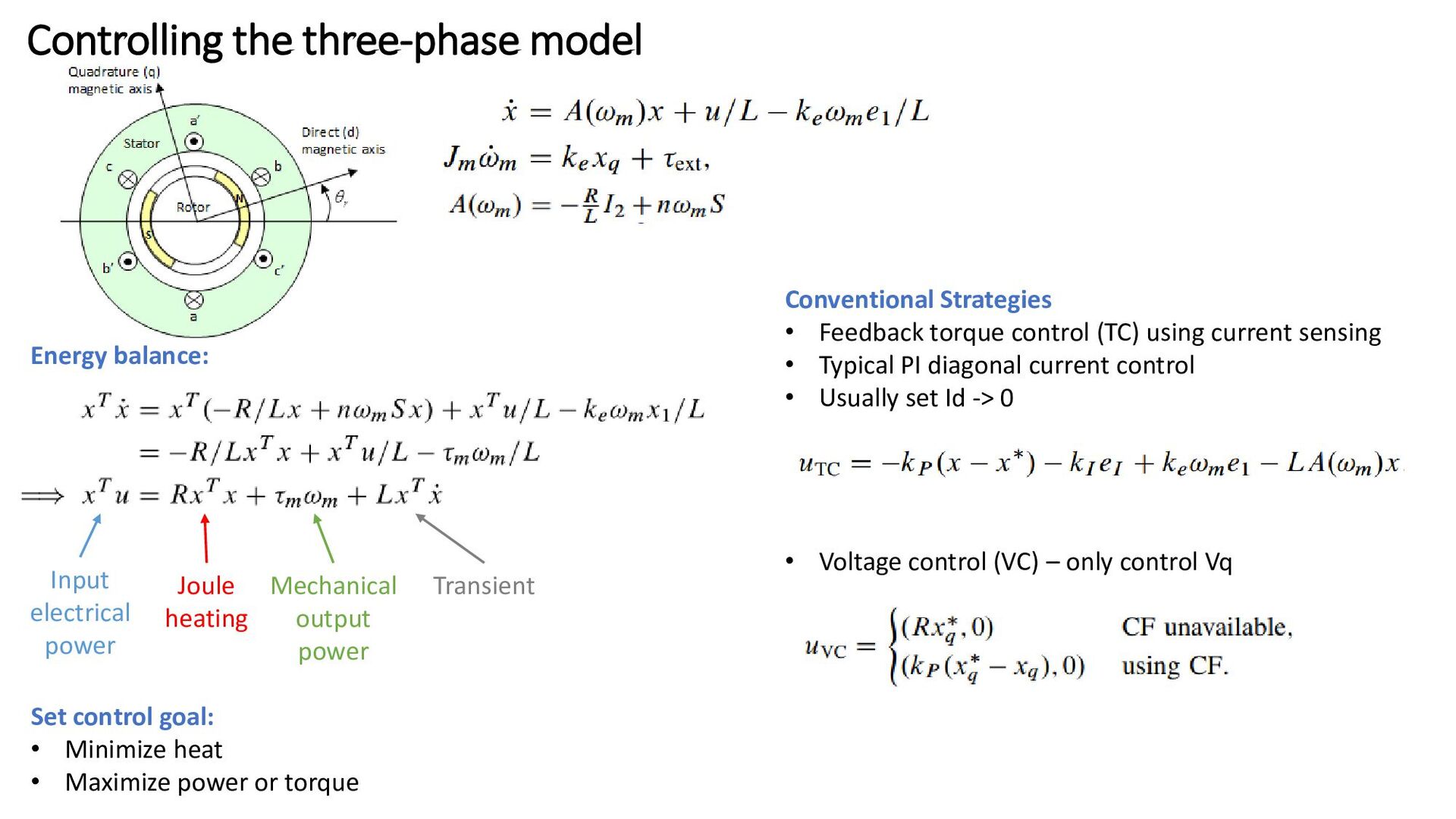
Minimize heat • Maximize power or torque Input electrical power Joule heating Mechanical output power Transient Conventional Strategies • Feedback torque control (TC) using current sensing • Typical PI diagonal current control • Usually set Id -> 0 • Voltage control (VC) – only control Vq
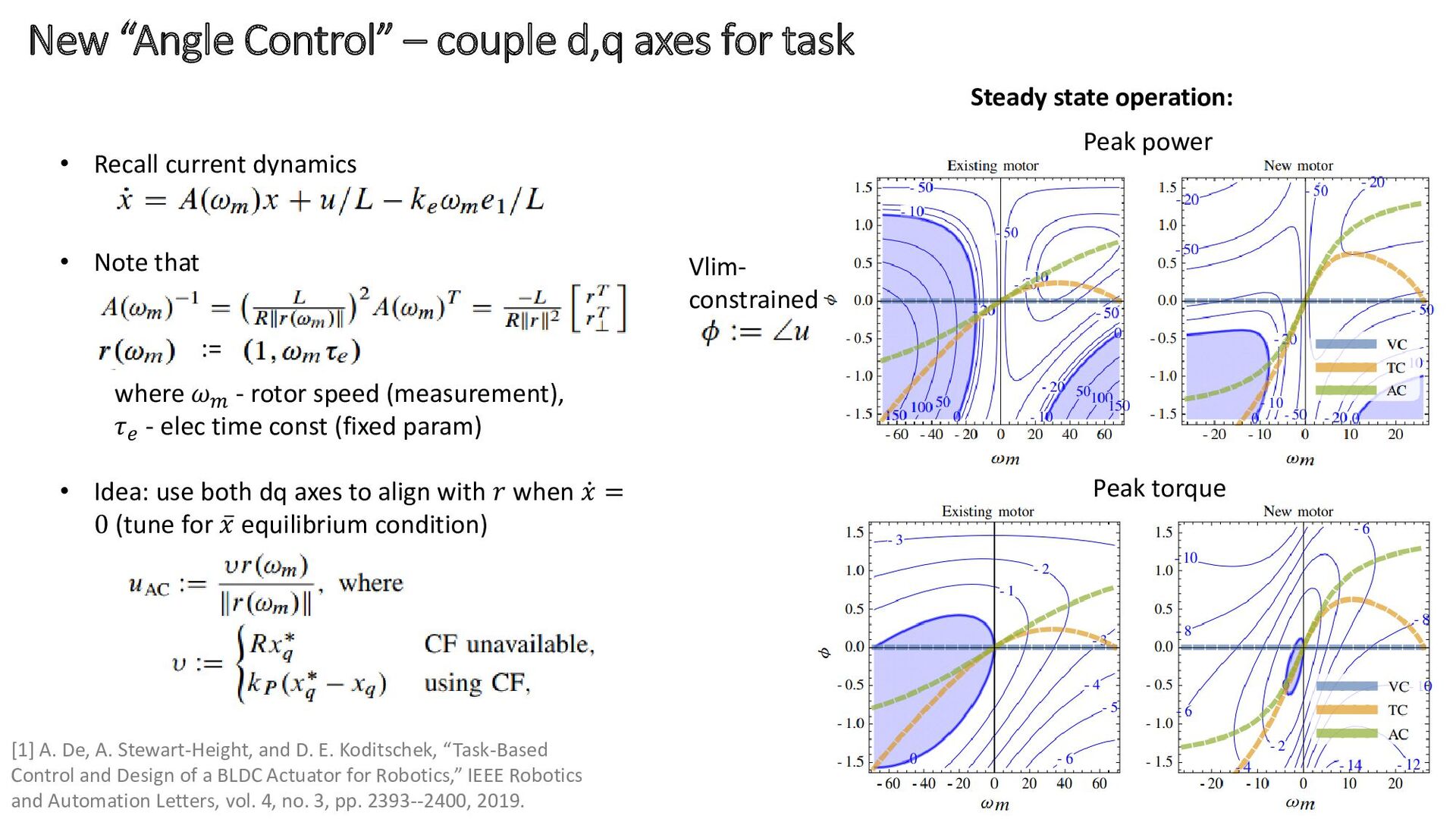
torque Peak power Vlim- constrained • Recall current dynamics • Note that where 𝜔𝑚 - rotor speed (measurement), 𝜏𝑒 - elec time const (fixed param) • Idea: use both dq axes to align with 𝑟 when ሶ 𝑥 = 0 (tune for ҧ 𝑥 equilibrium condition) := Steady state operation: [1] A. De, A. Stewart-Height, and D. E. Koditschek, “Task-Based Control and Design of a BLDC Actuator for Robotics,” IEEE Robotics and Automation Letters, vol. 4, no. 3, pp. 2393--2400, 2019.
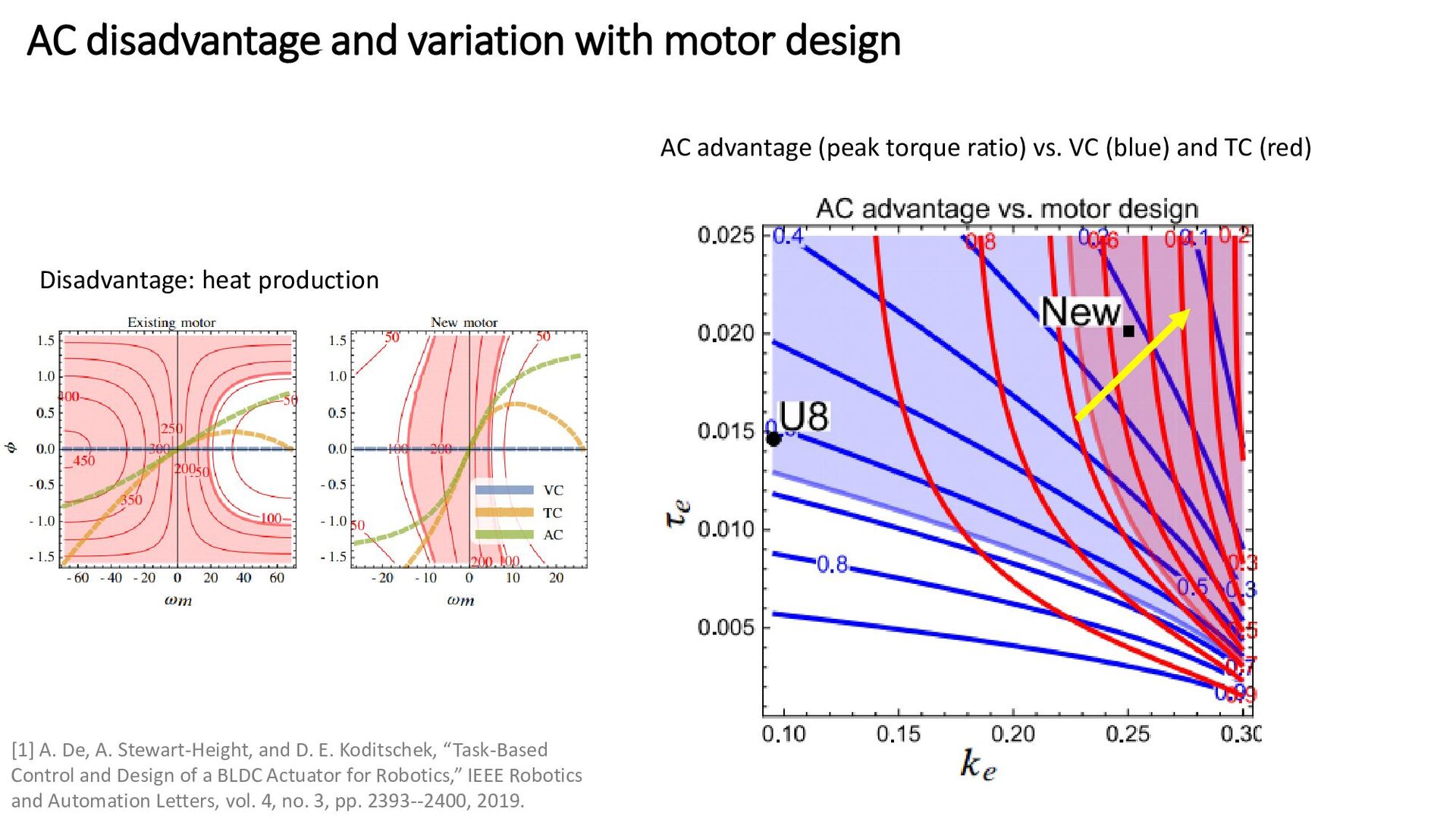
AC advantage (peak torque ratio) vs. VC (blue) and TC (red) [1] A. De, A. Stewart-Height, and D. E. Koditschek, “Task-Based Control and Design of a BLDC Actuator for Robotics,” IEEE Robotics and Automation Letters, vol. 4, no. 3, pp. 2393--2400, 2019.
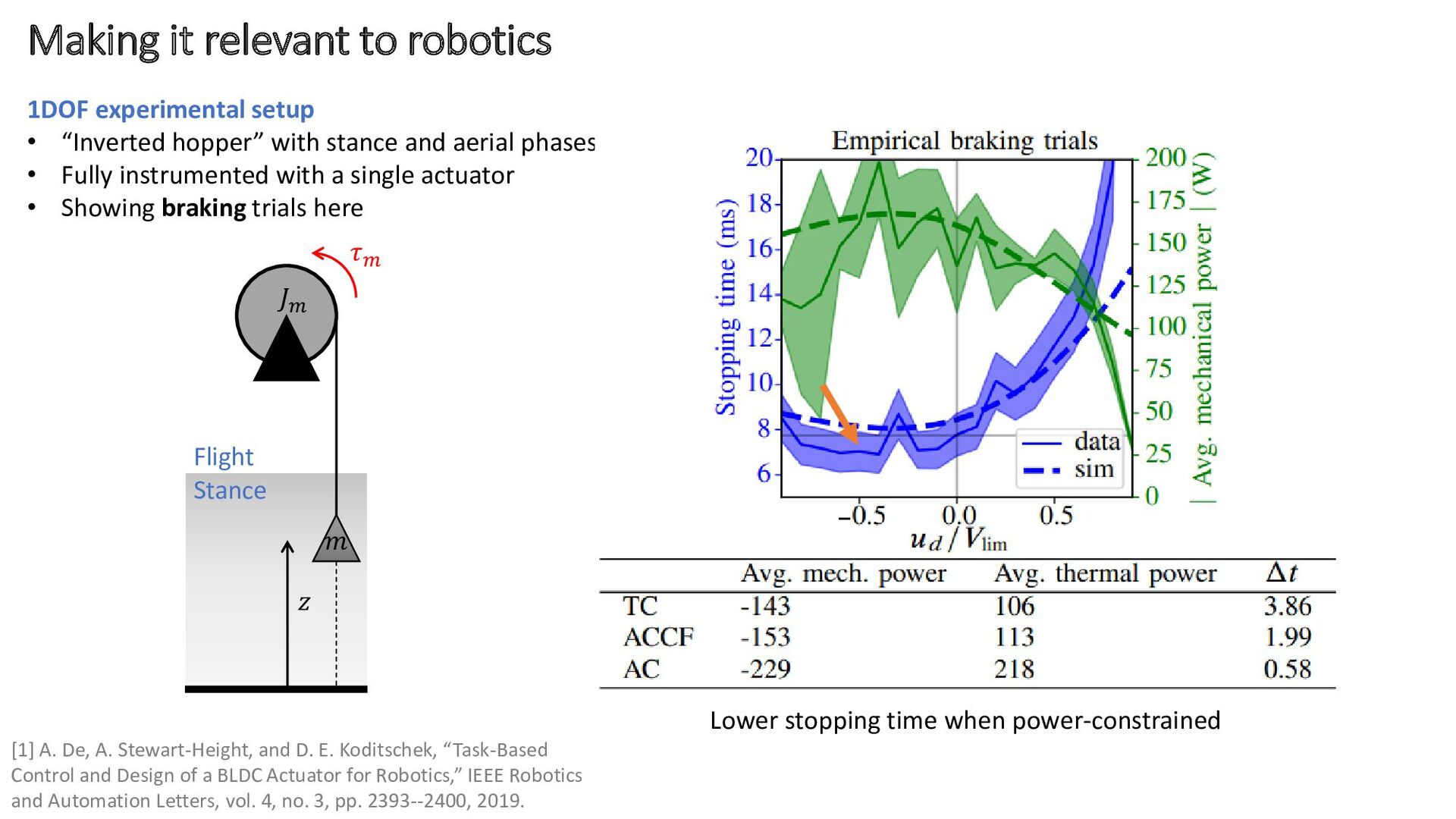
hopper” with stance and aerial phases • Fully instrumented with a single actuator • Showing braking trials here 𝑚 𝐽𝑚 𝜏𝑚 𝑧 Flight Stance Lower stopping time when power-constrained [1] A. De, A. Stewart-Height, and D. E. Koditschek, “Task-Based Control and Design of a BLDC Actuator for Robotics,” IEEE Robotics and Automation Letters, vol. 4, no. 3, pp. 2393--2400, 2019.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}