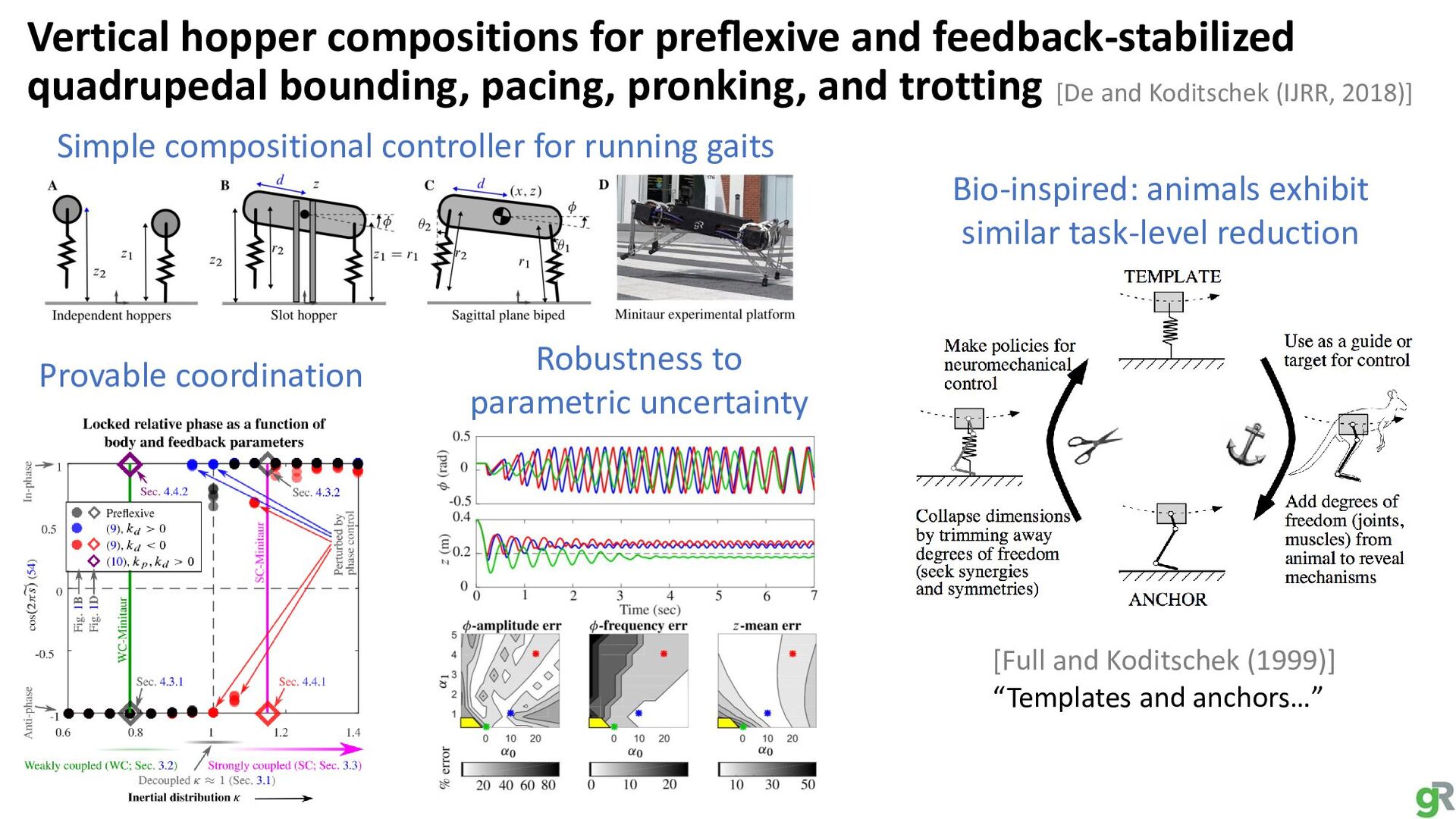
pronking, and trotting [Full and Koditschek (1999)] “Templates and anchors…” [De and Koditschek (IJRR, 2018)] Simple compositional controller for running gaits Provable coordination Robustness to parametric uncertainty Bio-inspired: animals exhibit similar task-level reduction
𝑢𝑎𝑛𝑐ℎ does not appear in ሷ 𝑟 • 𝑟 𝑞 is ~ virtual leg pos • SLIP dynamics are exactly embedded! A new kind of anchoring Input-decoupled anchoring with actuated IP template behavior Floating torso model 𝑥 ∈ 𝑆𝐸(2) Conventional anchoring Input- decoupled anchoring Invariant+attracting pitch-stable manifold (conventional anchoring/ZD) [Full & Kod (1999)] [Westervelt et al (2007)]
Vision 60 v4 Tesla Model S Ghost Vision 60 Specific joint torque (Nm/kg) 0.41 6.0 (15x) Specific peak power (W/kg) 250 1,305 (5x) Specific energy (Wh/kg) 40 30+ (similar) Control freq (Hz) 100 1,000 (10x) High force and power • The actuators (not the structure) need to support vehicle weight (including actuators) • Reciprocating swing legs need high peak power Specialized actuator requirements • High gear ratios result in high reflected actuator inertia • Harsh ground impact • High power required to swing legs • Control systems require very high actuator bandwidth for robustness/agility • Series-elastic limits bandwidth [Wensing (2017)] Efficiency fundamentally limited Can be seen in animals and robots
is hard • Stiff actuators that work in the factory and for aerial robots don’t work with legs • Managing interaction force requires force control bandwidth in the KHz range, precise detection of external forces, and specialized algorithms Impedance control [Posa et al (2014)] Air/water are predictable, whereas every single step for a legged robot contains unexpected contacts System dimension/underactuation Dimension Actuators Quadruped 36 12 Wheeled/tracked diff drive (vel control) 3 2 Wheeled/tracked fast 6 2 Quadrotor 12 4 Managing contacts • The robot body can only be controlled via ground contact • Even state of the art trajectory optimization cannot navigate the millions of possible contact sequences in anywhere near real time Environment complexity Even a single misstep/missed contact out of thousands can cause total failure Robustness requirements
{kind=link}
{kind=link}
![Challenges in legged locomotion: mechanics [Seok et. al. (2015)] GR](https://files.speakerdeck.com/presentations/fbfe7800b76140e79a8ab9cd0a58993c/slide_2.jpg){kind=link}
{kind=link}