Avik De Post-doctoral scholar; Ph.D. with Daniel Koditschek (2017), University of Pennsylvania Cofounder & CTO, Ghost Robotics (Philadelphia) ARL/GDRS RCTA W911NF-1020016 AFRL grant FA865015D1845 (subcontract 669737-1) ONR/OSD Vanevar Bush Fellowship N00014-16-1-2817
abundance Multiple solutions Preferred patterns of coordination are modulated across movements Reuse modules across behaviors Facilitate multifunctionality (same muscle, different function) Manage complexity of high-dimensional robots [Ting (2007)]
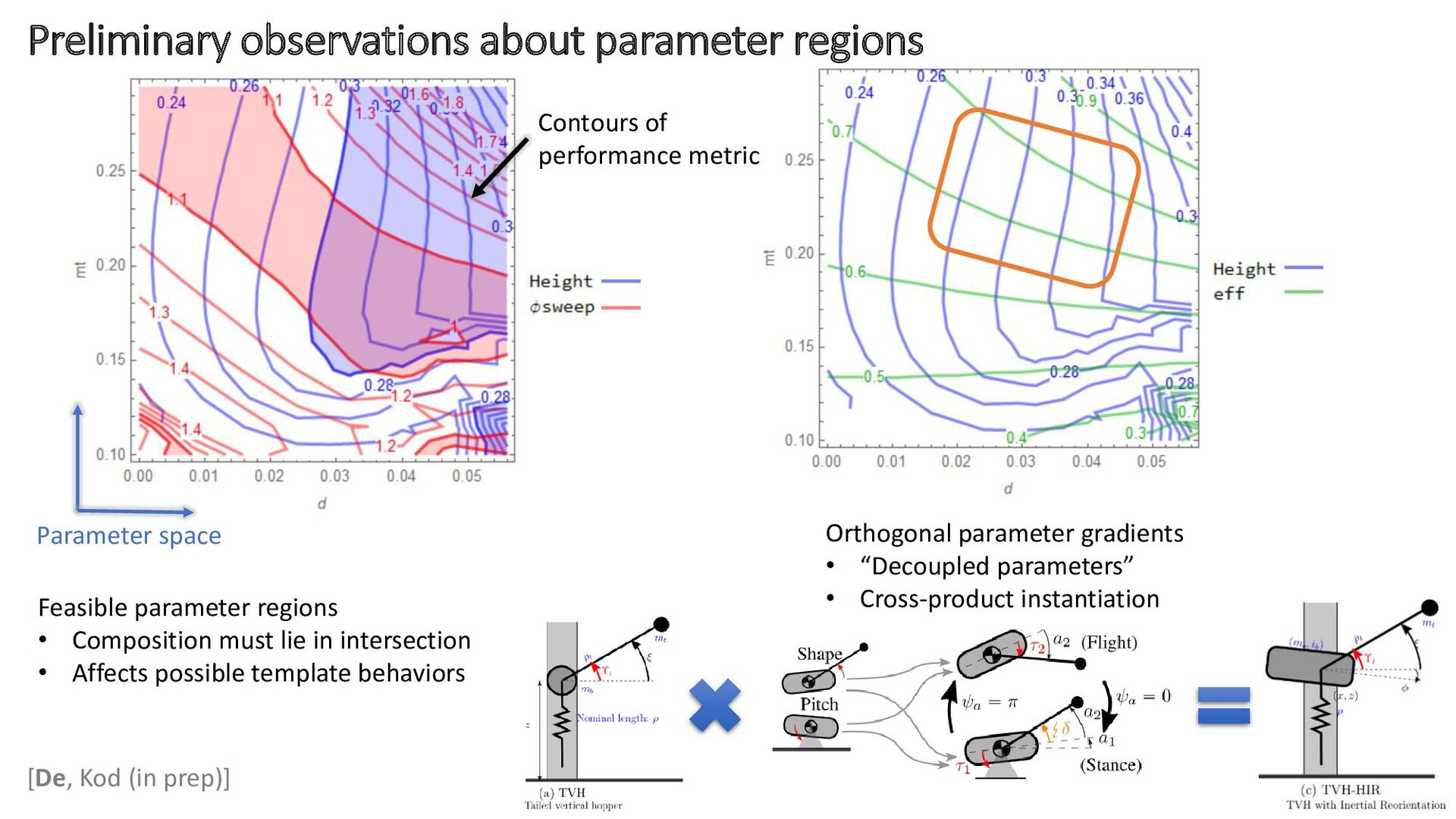
parameters” • Cross-product instantiation Feasible parameter regions • Composition must lie in intersection • Affects possible template behaviors [De, Kod (in prep)] Parameter space Contours of performance metric
{kind=link}
{kind=link}
{kind=link}
![Inspiration from Biology [Ting et. al. (2016)] Biology Robotics Motor](https://files.speakerdeck.com/presentations/6efd2dcadc5c49a2b4d8a4421426b839/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
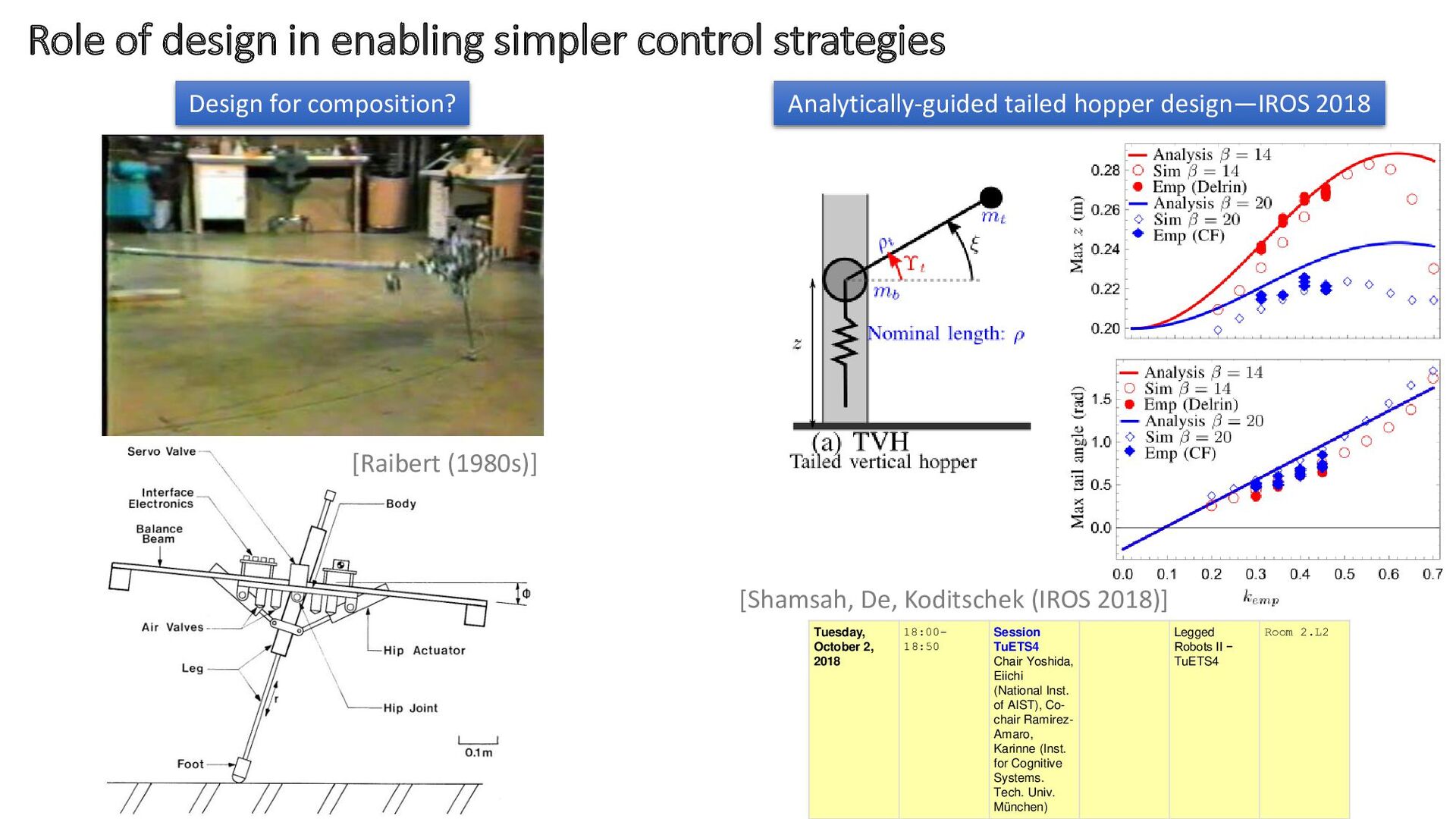
![Applications [Shamsah, De, Kod (IROS 2018)] [De, Kod in IJRR](https://files.speakerdeck.com/presentations/6efd2dcadc5c49a2b4d8a4421426b839/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Hierarchical synthesis strategy [Shamsah et al (IROS 2018)] [Libby et](https://files.speakerdeck.com/presentations/6efd2dcadc5c49a2b4d8a4421426b839/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}