direct-drive robots: genealogy [1] M. Raibert, “Legged Robots that Balance,” 1986. [2] M. Ahmadi and M. Buehler, "The ARL monopod II running robot: control and energetics," ICRA 1999. [3] D. Papadopoulos and M. Buehler, "Stable running in a quadruped robot with compliant legs," ICRA 2000. [4] U. Saranli, M Buhler and D. E. Koditschek, “RHex: A Simple and Highly Mobile Hexapod Robot,” IJRR 2001. [5] H. Asada and K. Youcef-Toumi, “Direct-Drive Robot: Theory and Practice.” [6] J. K. Salisbury, and M. A. Srinivasan, "Phantom-based haptic interaction with virtual objects," CG&A 1997. [7] S. Seok, A. Wang, M. Y. Michael Chuah, D. J. Hyun, J. Lee, D. M. Otten, J. H. Lang, and S. Kim, “Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot,” IEEE/ASME Transactions on Mechatronics, 2015. [8] G. Kenneally and D. E. Koditschek, “Kinematic Leg Design in an Electromechanical Robot,” Submitted. [9] G. Kenneally, A. De and D. E. Koditschek, “Design Principles for a Family of Direct-Drive Legged Robots,” in prep. Buehler et. al. ’99-’01 [2-4] Raibert ’86 [1] Asada ’87 [5] Kim ’15 [7] Kenneally ’15 [8] Salisbury ’97 [6] 3.5 Nm motor (250 g) ~0.7 KW Motor controller+encoder (~30 g) “Computer”+IMU (~20 g) [9]
{kind=link}
![Asada [5] > Kim [7] > Toward a family of](https://files.speakerdeck.com/presentations/487bdb288083439c9c0c328f9835b18c/slide_1.jpg){kind=link}
![> A family of direct-drive robots [1] • Motors: select](https://files.speakerdeck.com/presentations/487bdb288083439c9c0c328f9835b18c/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
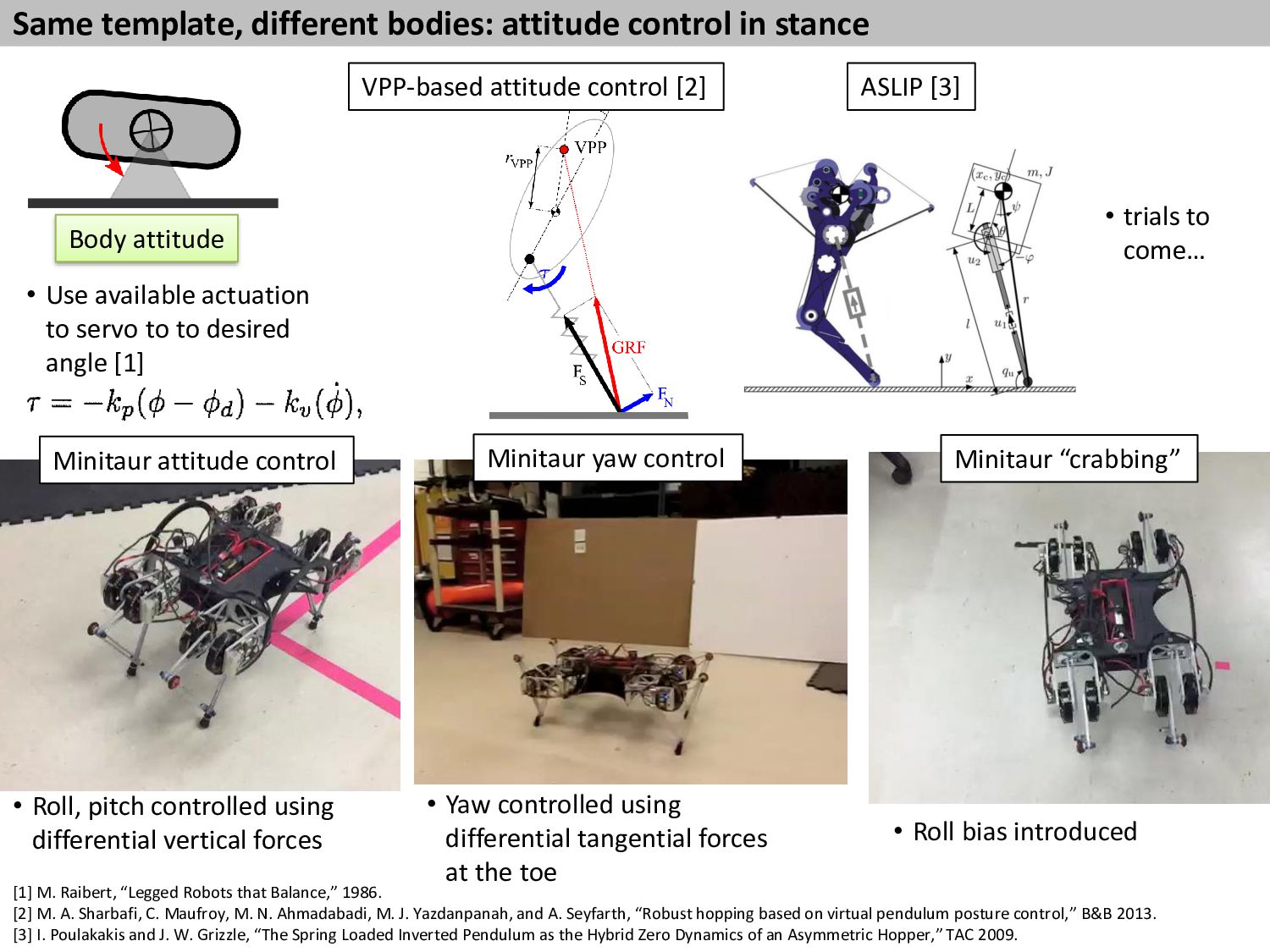
![Same template, different bodies: vertical hopping [1] M. Raibert, “Legged](https://files.speakerdeck.com/presentations/487bdb288083439c9c0c328f9835b18c/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![Same body; different composition: Jerboa [2] [1] A. De and](https://files.speakerdeck.com/presentations/487bdb288083439c9c0c328f9835b18c/slide_9.jpg){kind=link}
![Price of modularity DESIGN COMPROMISES (SIMPLE) PERFORMANCE (SUBTLE) [1] M.](https://files.speakerdeck.com/presentations/487bdb288083439c9c0c328f9835b18c/slide_10.jpg){kind=link}
{kind=link}