• (Discrete) construction of “value function” • Given • Infinite horizon cost • find instantaneous “good” direction • HJB equation Reactive control • Find a potential/energy-like function 𝑉(𝑥) • “Myopic” energy-like • “All-knowing” NF • … • ~simple to construct (which lends to easy analysis) • No built-in mechanism to account for the “path cost” [cf. VV/MIT project] [Zhong, …, Todorov (2013)]
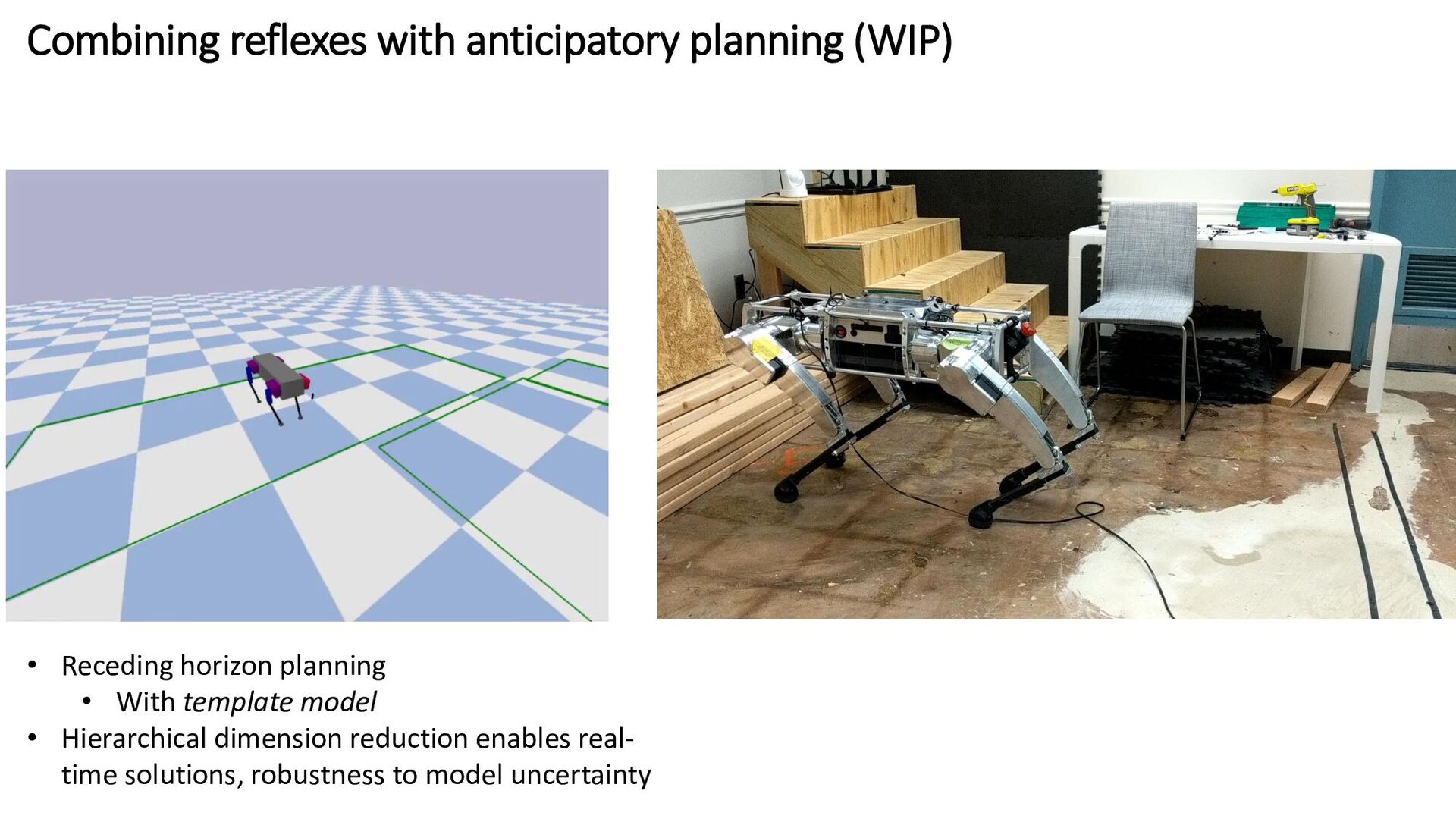
globally estimating VF—intractable • Local estimates around “frequented” regions of state space • “Trajectory optimization” -> local estimate around a specific state/input trajectory • Analogies for RL • Bad if perturbed to a different region of state space • Online “re-estimation” of finite-horizon value function -> MPC • Ensures the trajectory is “near” the current state
𝑢 … 𝑠. 𝑡. 𝑢 ∈ 𝑈 • Global solution if feasible space is convex • In practice: • QP of problem size 100—1000 < 1ms on desktop processor • Problem size 10—100 < 1ms on microcontroller Analytical • Inverse dynamics • Use properties of mechanical system -> natural control • Challenges: • Underactuation • Constraints: 𝑢 ∈ 𝑈? Friction? Recall (assuming known VF) • Optimal control wants • Reactive control wants 𝜕𝑉 𝜕𝑥 𝑓 𝑥, 𝑢 < 0
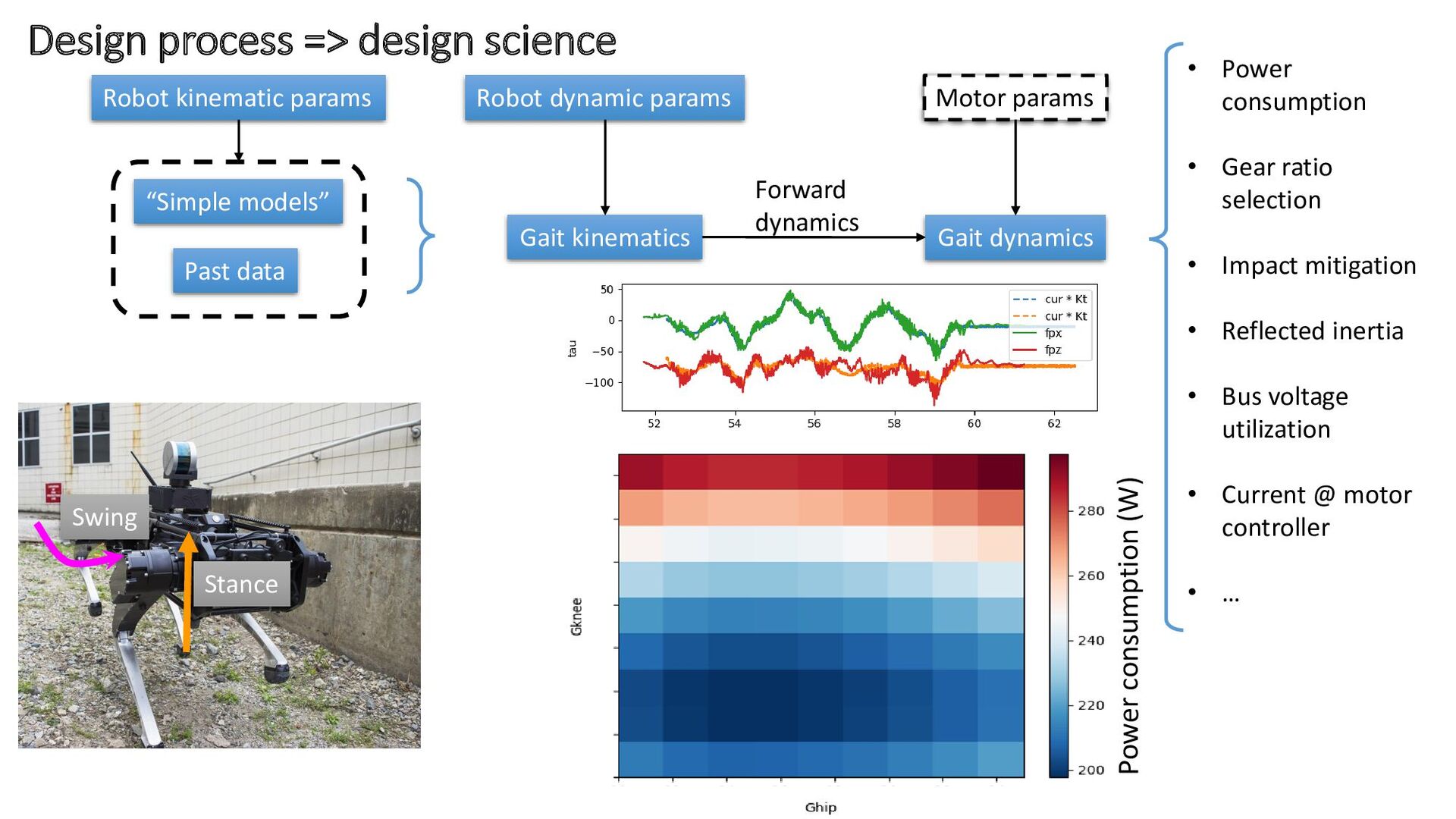
ratio selection • Impact mitigation • Reflected inertia • Bus voltage utilization • Current @ motor controller • … Power consumption (W) Swing Stance Gait kinematics “Simple models” Past data Gait dynamics Forward dynamics Robot kinematic params Robot dynamic params Motor params
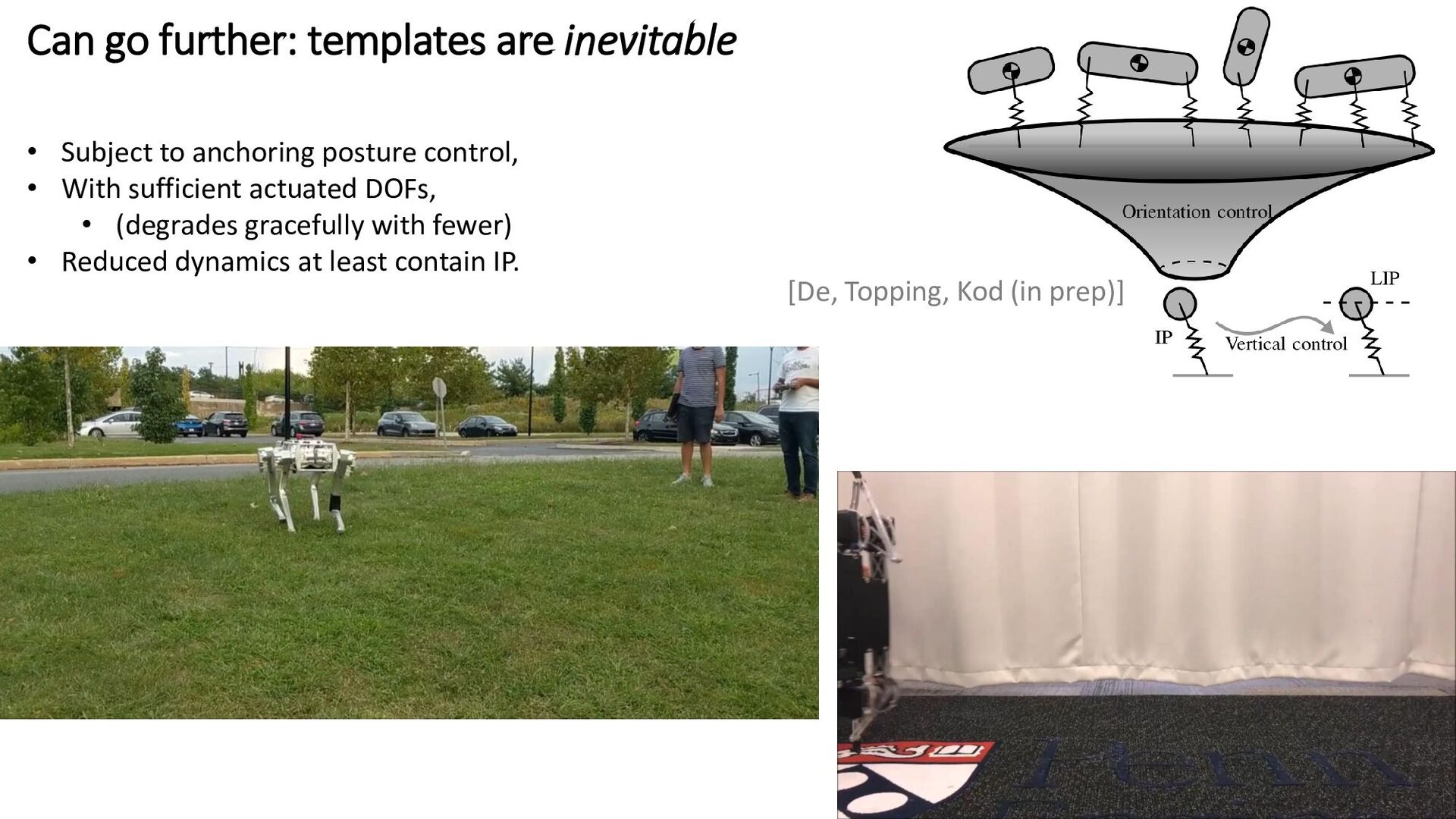
posture control, • With sufficient actuated DOFs, • (degrades gracefully with fewer) • Reduced dynamics at least contain IP. [De, Topping, Kod (in prep)]
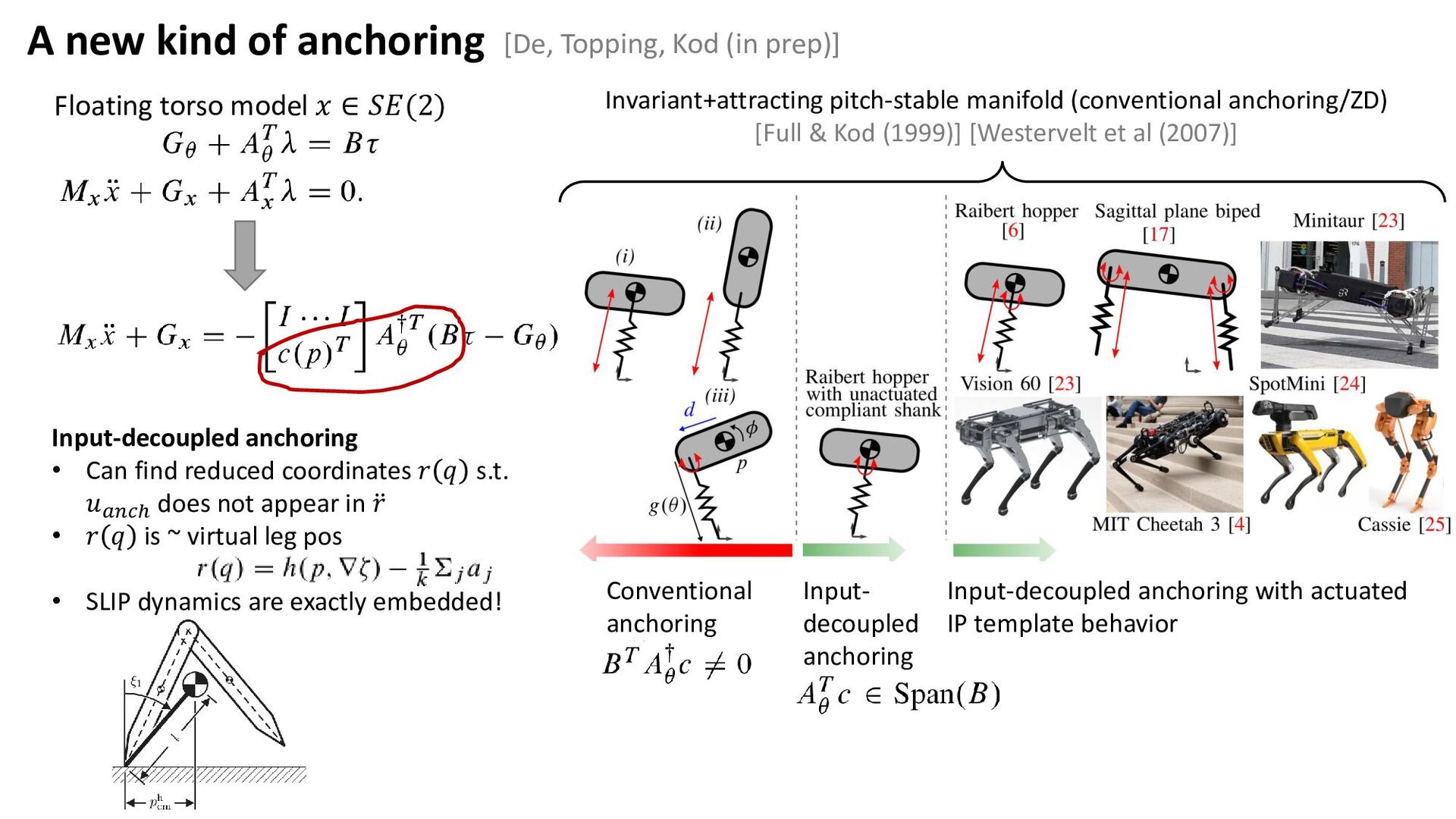
manifold” = pitch-steady locomotion (e.g. walking) • Render ZM attracting and invariant Limitations: • Restriction dynamics are affected by anchoring force • Form of restriction dynamics depends on virtual constraint choice Valid zero dynamics [De, Topping, Kod (in prep)] [Westervelt et. al (2007)]
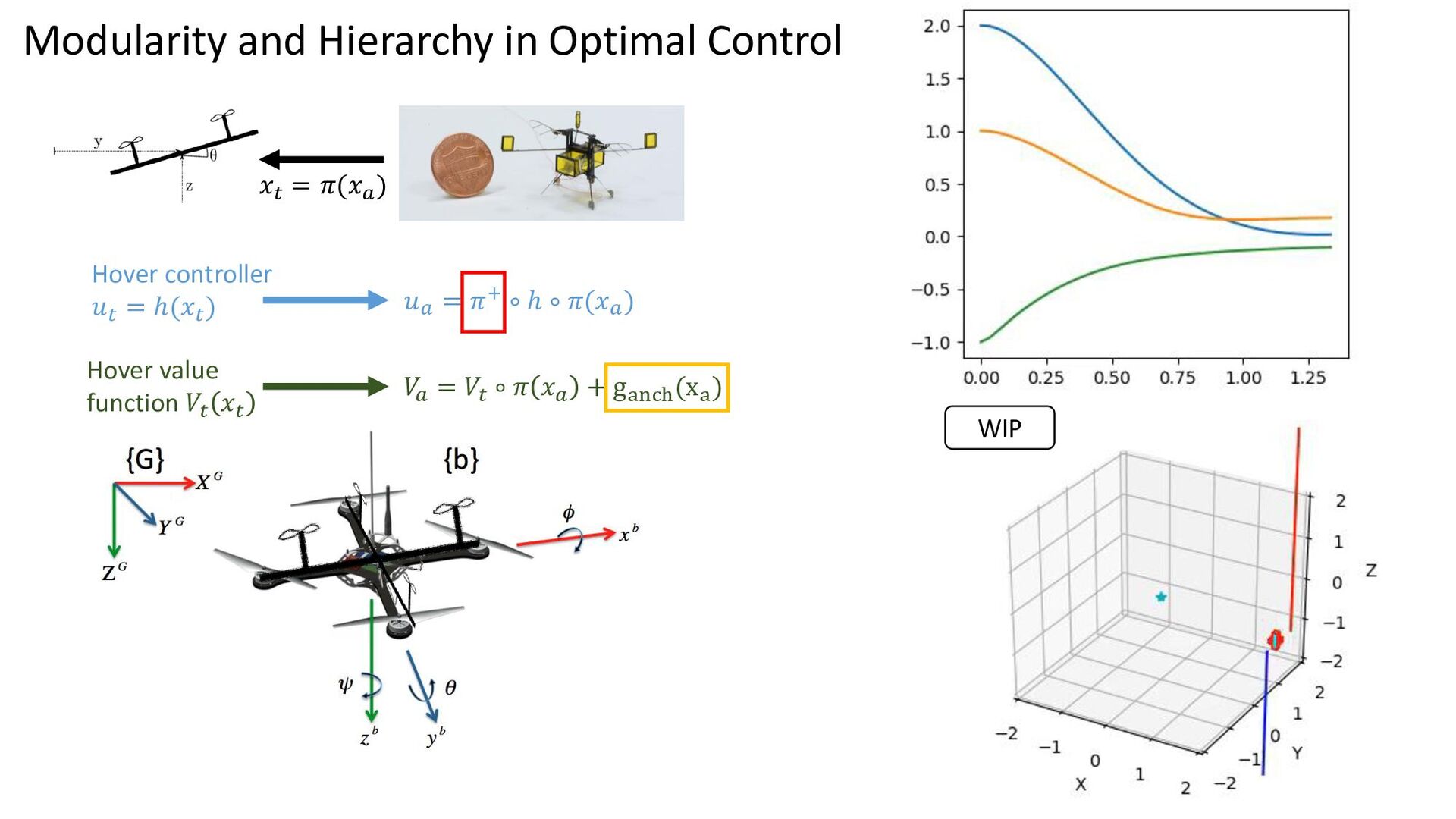
𝑢𝑎𝑛𝑐ℎ does not appear in ሷ 𝑟 • 𝑟 𝑞 is ~ virtual leg pos • SLIP dynamics are exactly embedded! A new kind of anchoring Input-decoupled anchoring with actuated IP template behavior Floating torso model 𝑥 ∈ 𝑆𝐸(2) Conventional anchoring Input- decoupled anchoring Invariant+attracting pitch-stable manifold (conventional anchoring/ZD) [Full & Kod (1999)] [Westervelt et al (2007)] [De, Topping, Kod (in prep)]
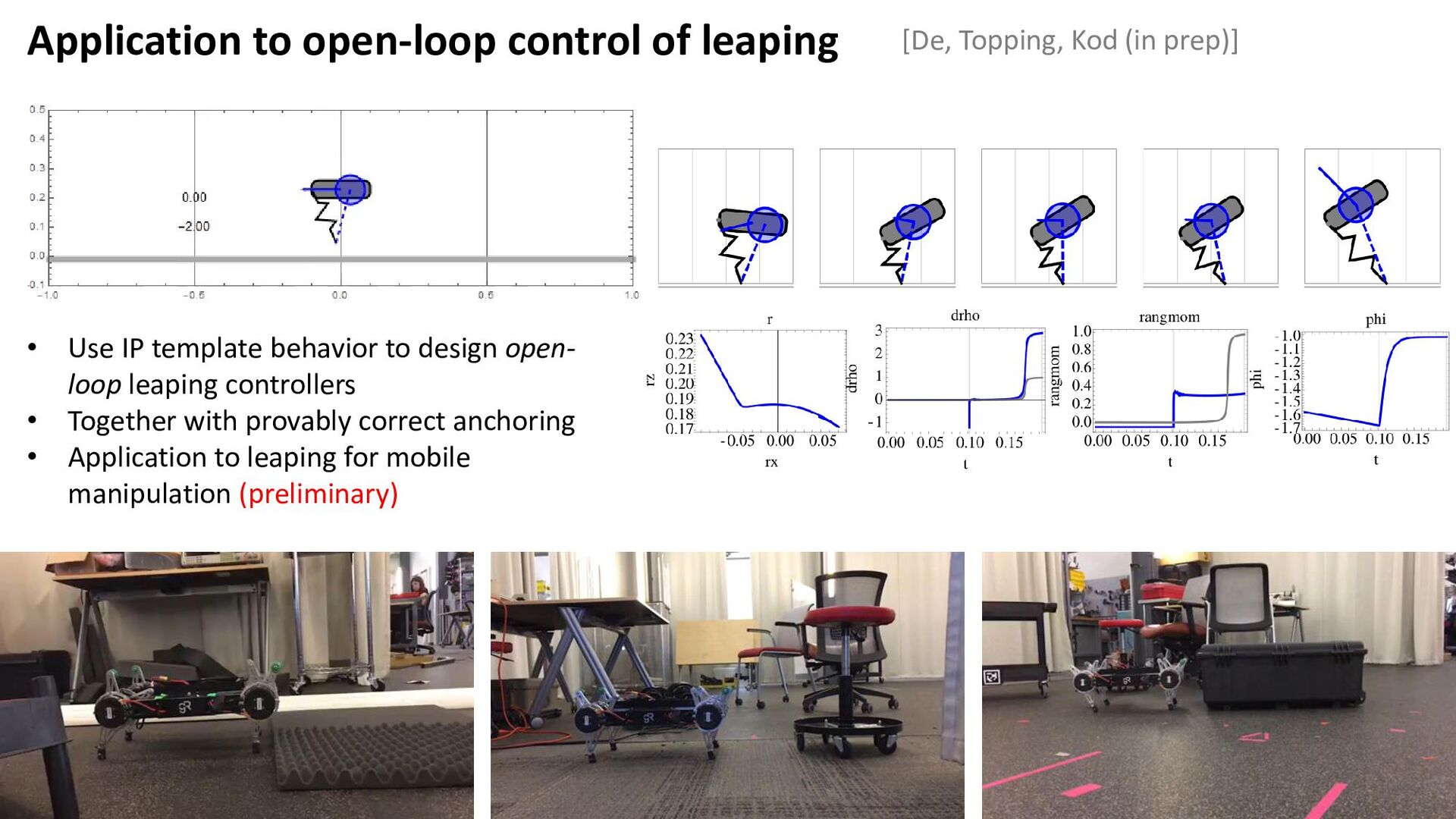
prep)] • Use IP template behavior to design open- loop leaping controllers • Together with provably correct anchoring • Application to leaping for mobile manipulation (preliminary)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Control as reduction (anchoring) + composition [Full and Koditschek (1999)]](https://files.speakerdeck.com/presentations/2f66544a336047dd806e831dda0c0aaf/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}