posture control, • With sufficient actuated DOFs, • (degrades gracefully with fewer) • Reduced dynamics at least contain IP. [De, Topping, Kod (in prep)] Back from commercial to research!
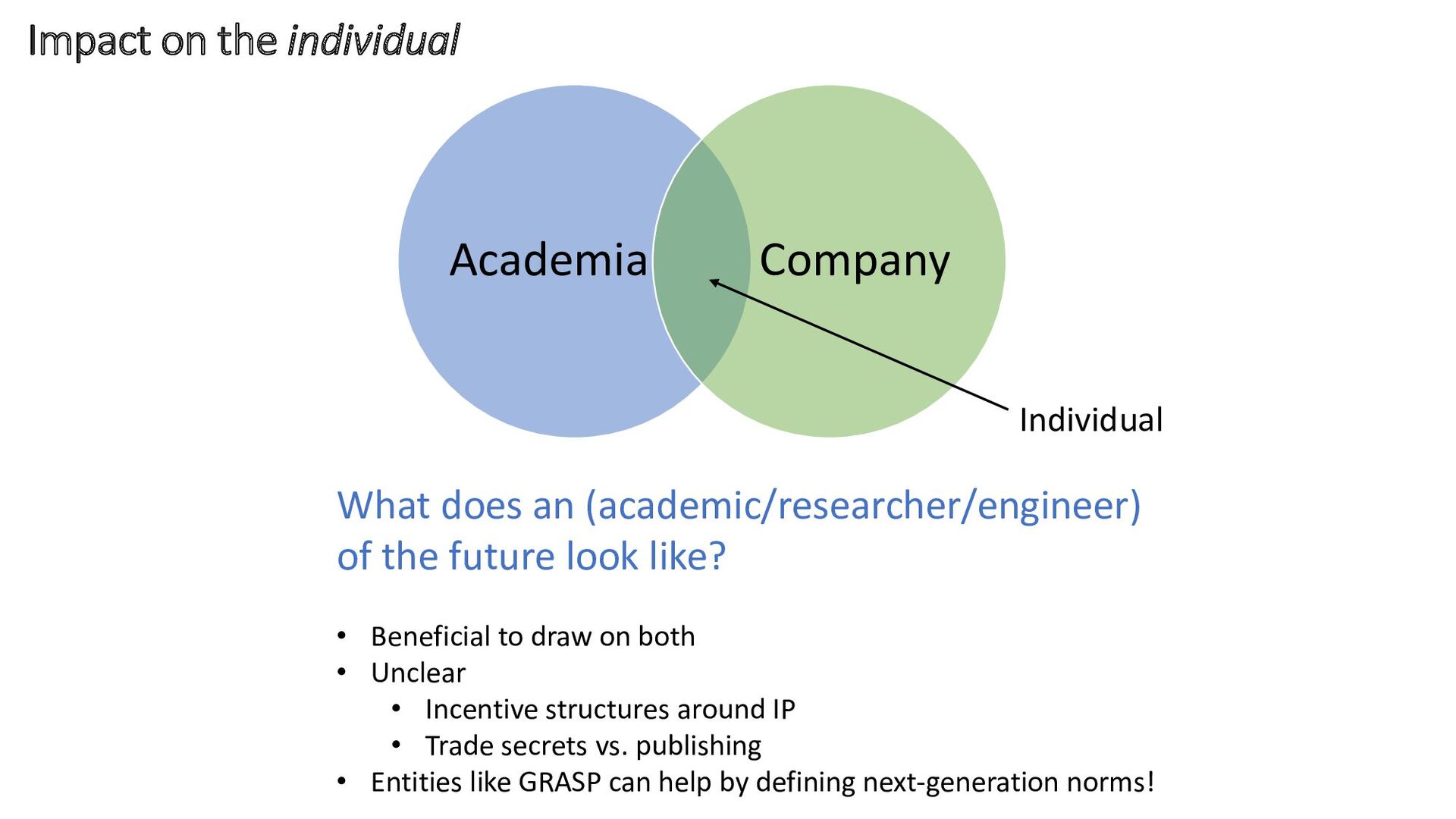
future look like? • Beneficial to draw on both • Unclear • Incentive structures around IP • Trade secrets vs. publishing • Entities like GRASP can help by defining next-generation norms! Academia Company Individual
{kind=link}
{kind=link}
![Perspectives on (legged) robot control [Raibert (1986)] Simple controllers →](https://files.speakerdeck.com/presentations/1cc41f5b3cbd4e8bb84b9bb39b81461d/slide_2.jpg){kind=link}
{kind=link}
![Applications [Shamsah, De, Kod (IROS 2018)] [De, Kod in IJRR](https://files.speakerdeck.com/presentations/1cc41f5b3cbd4e8bb84b9bb39b81461d/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}