Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Physical computing with GPIO Zero - oggcamp
Search
Ben Nuttall
November 01, 2015
Programming
370
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Physical computing with GPIO Zero - oggcamp
Presentation given at oggcamp 2015 on the new GPIO Zero Python library
Ben Nuttall
November 01, 2015
More Decks by Ben Nuttall
See All by Ben Nuttall
Numeronyms are obnoxious
bennuttall
0
510
Live Highlights in BBC iPlayer
bennuttall
0
160
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
230
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
170
Running a Python Package Index for Raspberry Pi
bennuttall
0
190
From Acorns to Raspberries
bennuttall
0
170
Innovation in the newsroom
bennuttall
0
220
Innovation in the newsroom - MOS Running Order Manager
bennuttall
0
250
How to market your open source project
bennuttall
0
290
Other Decks in Programming
See All in Programming
AWS CDK を「作」ってみた 〜フルスクラッチで見えた CDK の裏側〜 / aws-cdk-from-scratch
gotok365
3
300
Foundation Models frameworkで画像分析
ryodeveloper
1
110
ルールを書いて終わらせないハーネスエンジニアリング
yug1224
2
1.3k
OS アップデート対応の取り組み方がもっと共有されてほしい
andpad
0
110
JAWS-UG横浜 #102 AWSサ終供養LT会 成仏できない AWS サービスたち 〜本日、三体供養します〜
maroon1st
0
160
OSINT for SRE: 学術論文とポストモーテムから探る システム障害の共通パターン / SRE NEXT 2026
tomoyk
1
3.6k
20260623_Loop Engineeringで自分の分身の問い合わせBotを作る
ryugen04
0
210
共通化で考えるべきは、実装より公開する型だった
codeegg
0
230
言語を使う側から、作る側へ。 自作 Lisp で得た新たな気づき。
andpad
0
120
音楽のための関数型プログラミング言語mimiumにおける多段階計算の活用
tomoyanonymous
1
320
ローカルLLMでどこまでコードが書けるか -縮小版 / How much code can be written on a local LLM Shortened
kishida
2
190
えっ!!コードを読まずに開発を!?
hananouchi
0
200
Featured
See All Featured
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
580
How to build an LLM SEO readiness audit: a practical framework
nmsamuel
1
800
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
150
Ethics towards AI in product and experience design
skipperchong
2
330
Producing Creativity
orderedlist
PRO
348
40k
How to Think Like a Performance Engineer
csswizardry
28
2.7k
The Language of Interfaces
destraynor
162
27k
Groundhog Day: Seeking Process in Gaming for Health
codingconduct
0
240
DevOps and Value Stream Thinking: Enabling flow, efficiency and business value
helenjbeal
1
260
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
750
Designing Dashboards & Data Visualisations in Web Apps
destraynor
231
55k
Transcript
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
Ben Nuttall • Education Developer Advocate at the Raspberry Pi
Foundation – Software & project development – Learning resources & teacher training – Outreach • Hobbyist turned employee • Based in Cambridge (but from the North) • @ben_nuttall on Twitter
Python – RPi.GPIO import RPi.GPIO as GPIO from time import
sleep GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) led = 17 GPIO.setup(led, GPIO.OUT) while True: GPIO.output(led, True) sleep(1) GPIO.output(led, False) sleep(1)
Python – GPIO Zero from gpiozero import LED from time
import sleep led = LED(17) while True: led.on() sleep(1) led.off() sleep(1)
LED from gpiozero import LED from time import sleep led
= LED(17) led.on() # on led.off() # off led.toggle() # on>off or off>on led.blink() # flash on/off continuously
LED + Button from gpiozero import LED, Button led =
LED(17) button = Button(3) button.when_pressed = led.on button.when_released = led.off
Source + Values from gpiozero import LED, Button led =
LED(17) button = Button(3) led.source = button.values
LED - PWM from gpiozero import PWMLED from time import
sleep led = PWMLED(17) led.on() # on led.off() # off led.value = 0.5 # half brightness
Motion sensor from gpiozero import LED, MotionSensor led = LED(2)
sensor = MotionSensor(3) sensor.when_motion = led.on sensor.when_no_motion = led.off
Light sensor from gpiozero import LED, LightSensor led = LED(2)
sensor = LightSensor(3) while True: sensor.wait_for_light() print("It's light!") sensor.wait_for_dark() print("It's dark")
Traffic Lights from gpiozero import TrafficLights lights = TrafficLights(9, 10,
11) lights.on() # all on lights.off() # all off lights.red.on() # red on lights.toggle() # swap state of all lights
Traffic Lights sequence lights.green.on() lights.amber.off() lights.red.off() while True: sleep(10) lights.green.off()
lights.amber.on() sleep(1) lights.amber.off() lights.red.on() sleep(10) lights.amber.on() sleep(1) lights.green.on() lights.amber.off() lights.red.off()
TrafficHat from gpiozero import TrafficHat th = TrafficHat() th.lights.red.on() th.lights.amber.on()
th.button.when_pressed = th.on th.button.when_released = th.off
TrafficHat - PWM from gpiozero import TrafficHat th = TrafficHat(pwm=True)
th.lights.red.value = 0.2 th.lights.amber.value = 0.4 th.lights.green.value = 0.8
Push button stop motion from gpiozero import Button from picamera
import PiCamera button = Button(4) with PiCamera() as camera: camera.start_preview() frame = 1 while True: button.wait_for_press() camera.capture('/home/pi/frame%03d.jpg' % frame) frame += 1
Full colour LED from gpiozero import RGBLED led = RGBLED(2,
3, 4) led.red.on() # full red led.color = (1, 0, 1) # purple led.blue = 0.3 # dim the blue value to 0.3 # now (1, 0, 0.3)
Motor from gpiozero import Motor from time import sleep motor
= Motor(forward=17, backward=18) while True: motor.forward() sleep(5) motor.backward() sleep(5)
Robot from gpiozero import Robot from time import sleep robot
= Robot(left=(17, 18), right=(22, 23)) while True: robot.forward() sleep(10) robot.left() sleep(1)
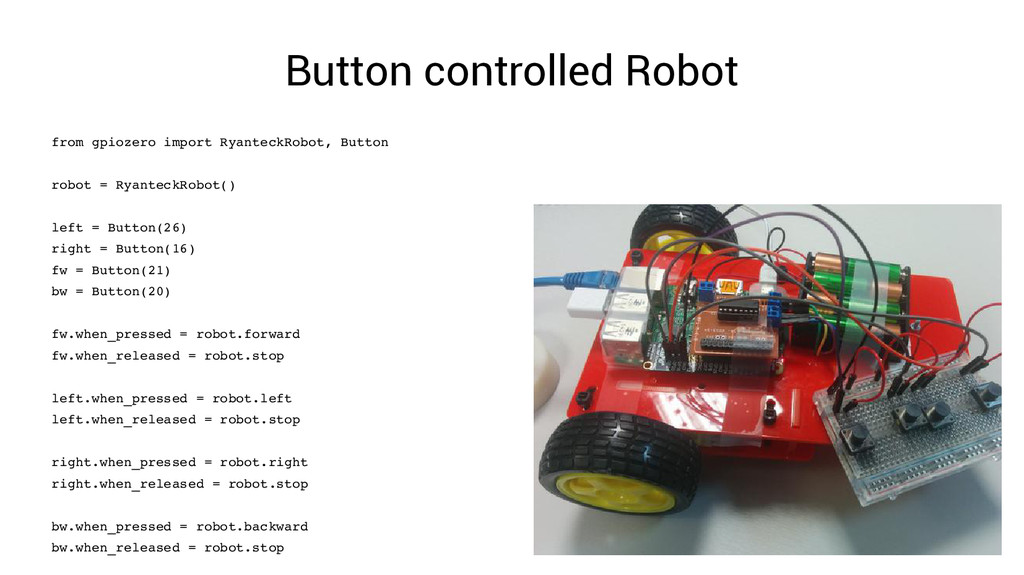
Button controlled Robot from gpiozero import RyanteckRobot, Button robot =
RyanteckRobot() left = Button(26) right = Button(16) fw = Button(21) bw = Button(20) fw.when_pressed = robot.forward fw.when_released = robot.stop left.when_pressed = robot.left left.when_released = robot.stop right.when_pressed = robot.right right.when_released = robot.stop bw.when_pressed = robot.backward bw.when_released = robot.stop
Analogue - potentiometers from gpiozero import MCP3008 pot = MCP3008()
while True: print(pot.value)
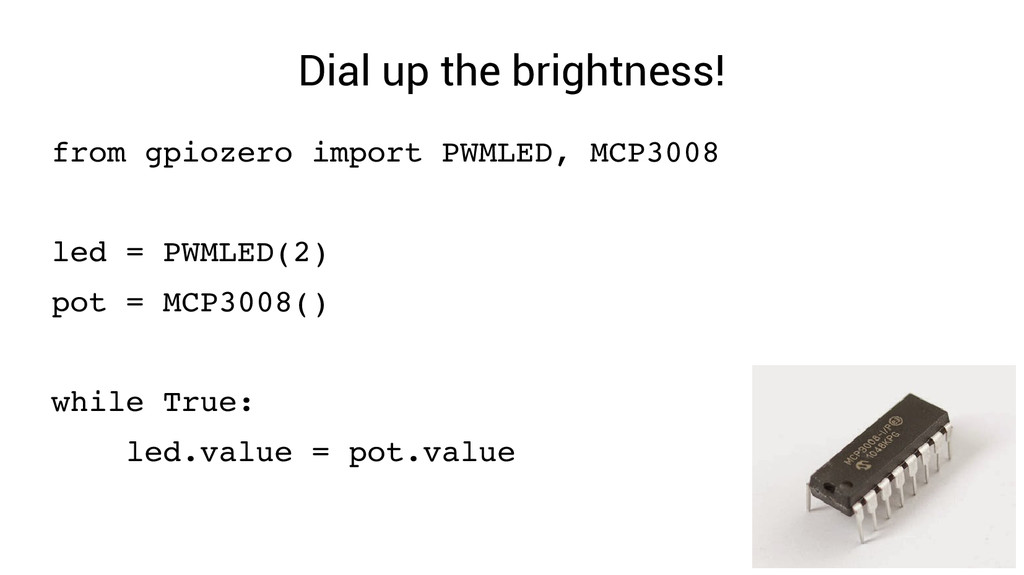
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() while True: led.value = pot.value
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() led.source = pot.values
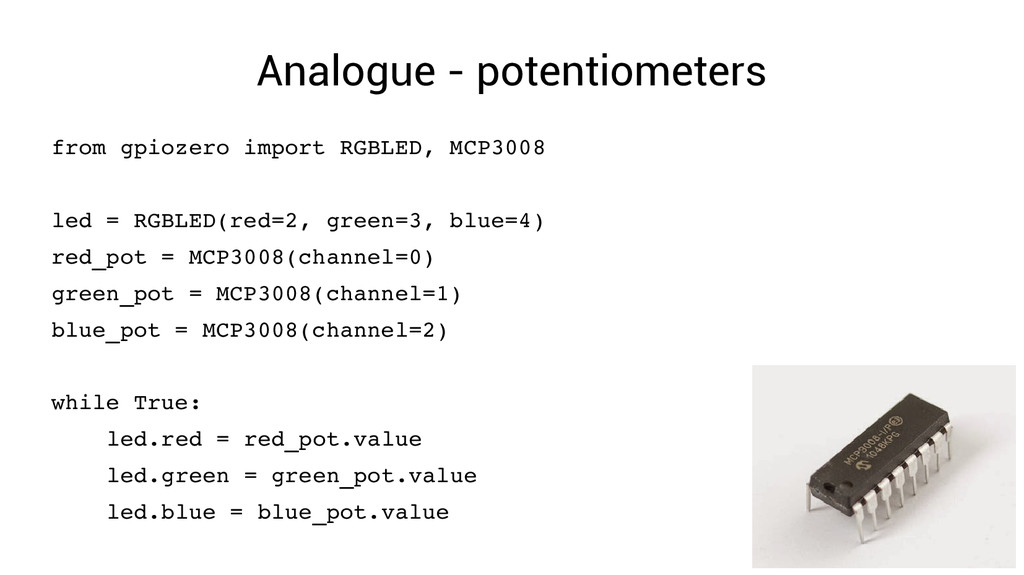
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) while True: led.red = red_pot.value led.green = green_pot.value led.blue = blue_pot.value
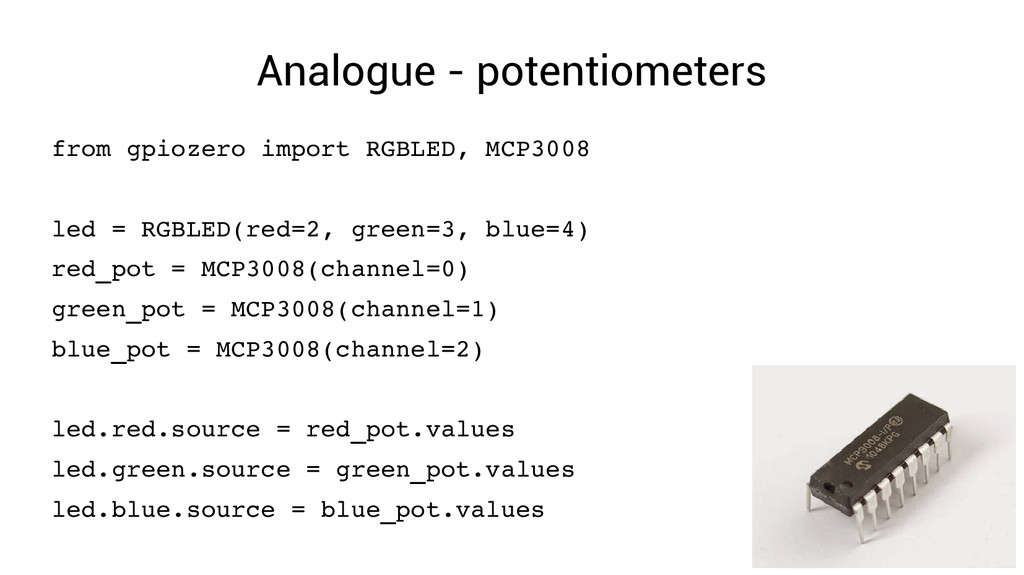
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) led.red.source = red_pot.values led.green.source = green_pot.values led.blue.source = blue_pot.values
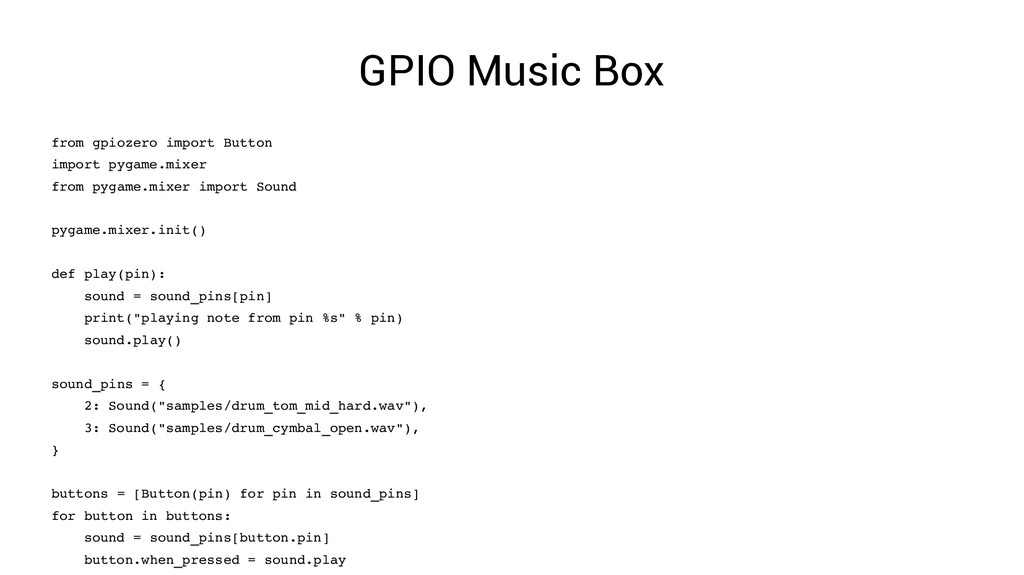
GPIO Music Box from gpiozero import Button import pygame.mixer from
pygame.mixer import Sound pygame.mixer.init() def play(pin): sound = sound_pins[pin] print("playing note from pin %s" % pin) sound.play() sound_pins = { 2: Sound("samples/drum_tom_mid_hard.wav"), 3: Sound("samples/drum_cymbal_open.wav"), } buttons = [Button(pin) for pin in sound_pins] for button in buttons: sound = sound_pins[button.pin] button.when_pressed = sound.play
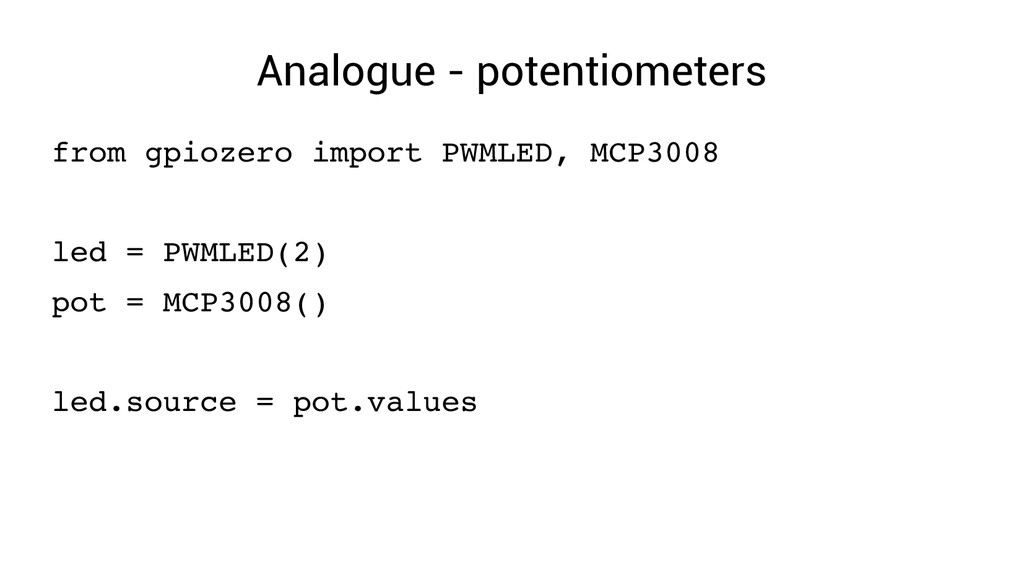
Analogue - potentiometers from gpiozero import PWMLED, MCP3008 led =
PWMLED(2) pot = MCP3008() led.source = pot.values
GPIO Zero - beta • www.pythonhosted.org/gpiozero – Installation instructions –
Documentation – Examples • GitHub Issues – Suggestions – Feedback • Contact me –
[email protected]
– @ben_nuttall on Twitter • #gpiozero on Twitter
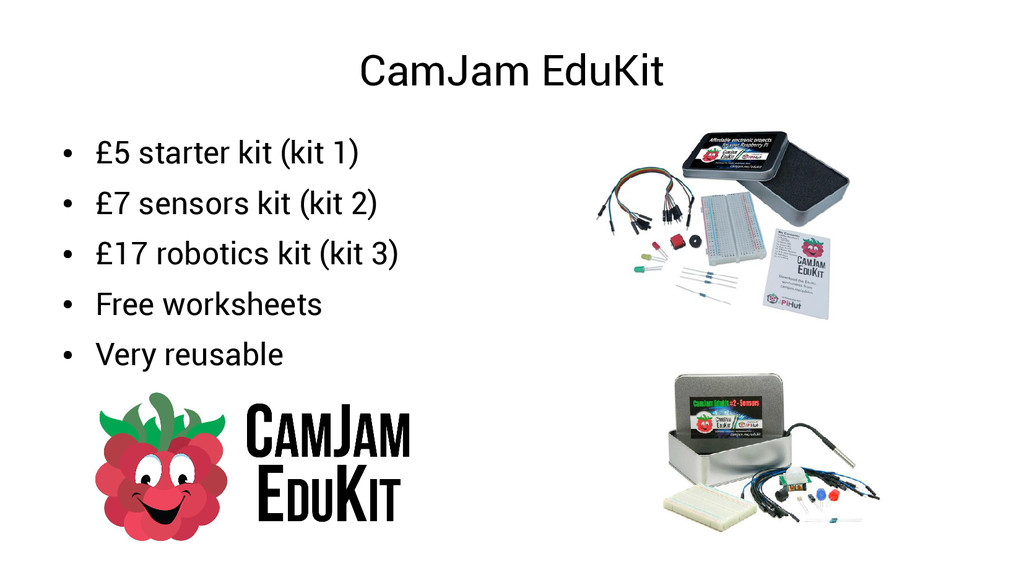
CamJam EduKit • £5 starter kit (kit 1) • £7
sensors kit (kit 2) • £17 robotics kit (kit 3) • Free worksheets • Very reusable
The MagPi
The MagPi
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}