Quoi de mieux que d'apprendre par le jeu, me suis-je dit. Quelques heures plus tard, me voilà à créer un jeu de voitures rudimentaire dans mon navigateur afin de tenter de comprendre la neuroévolution. Je vous propose de refaire ensemble ce parcours initiatique.
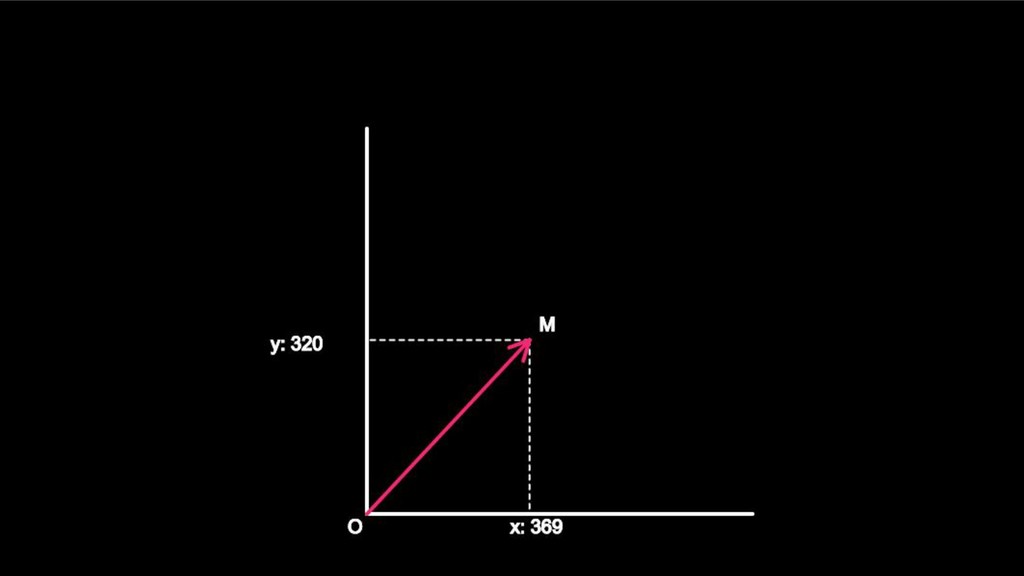
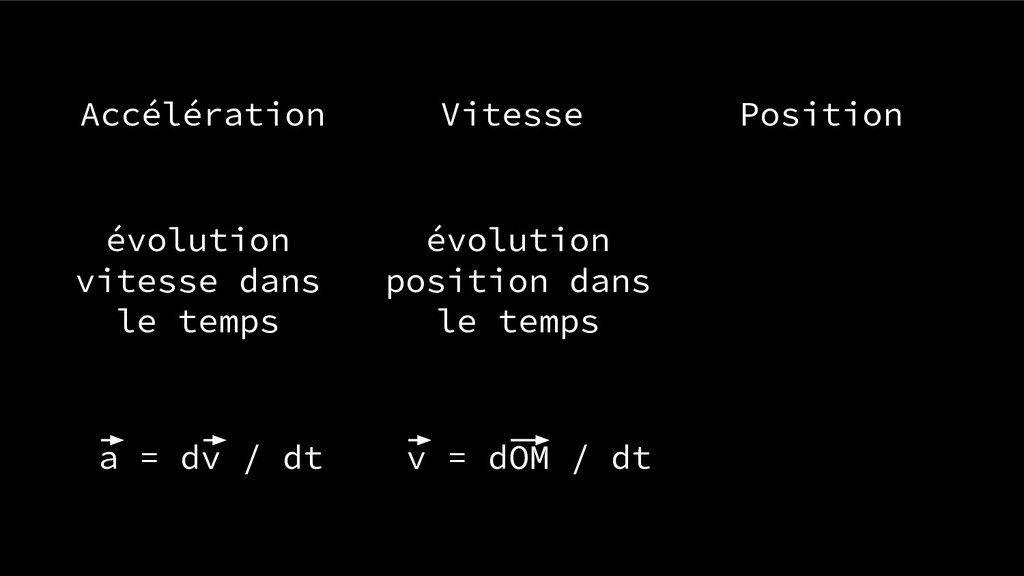
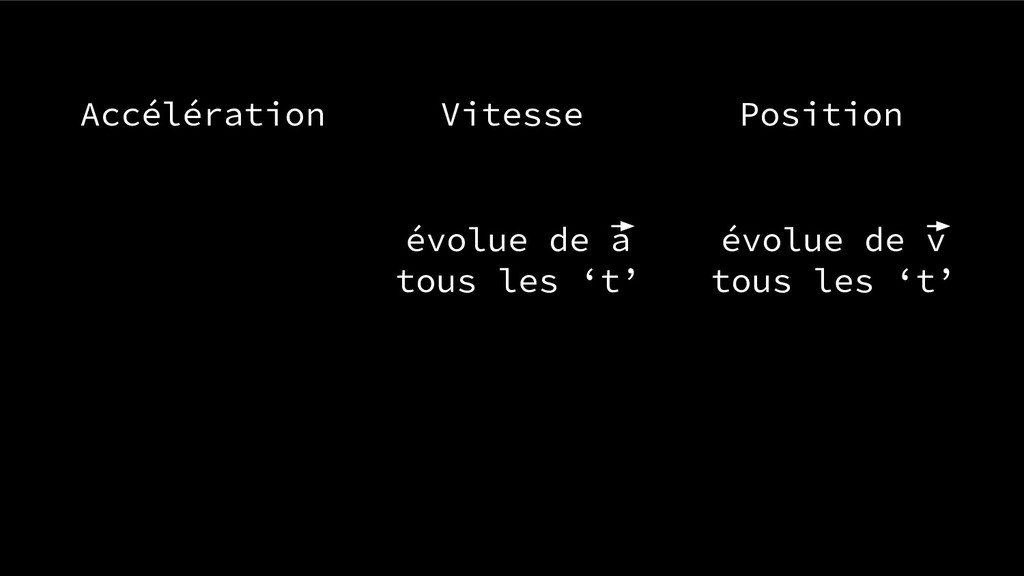
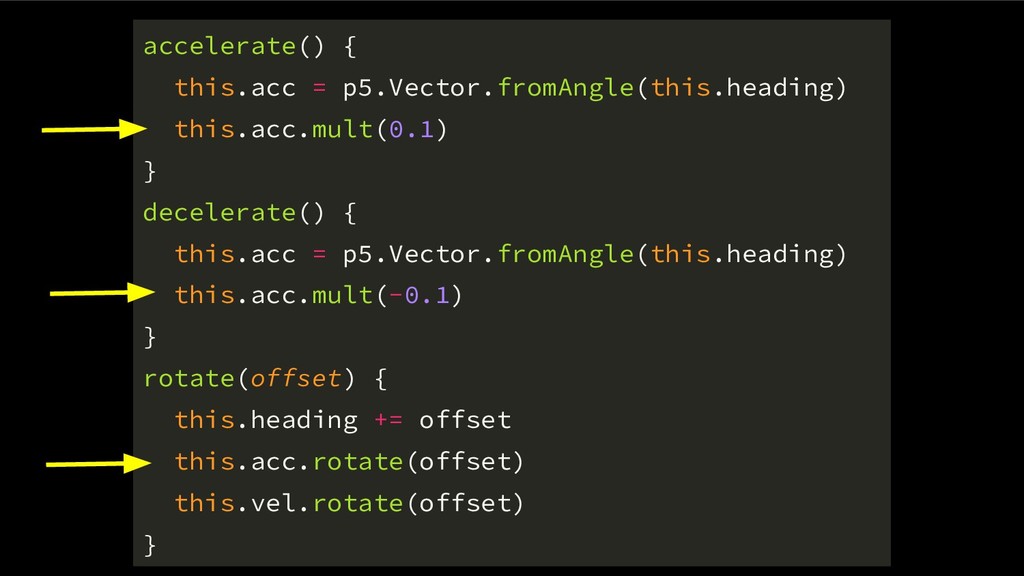
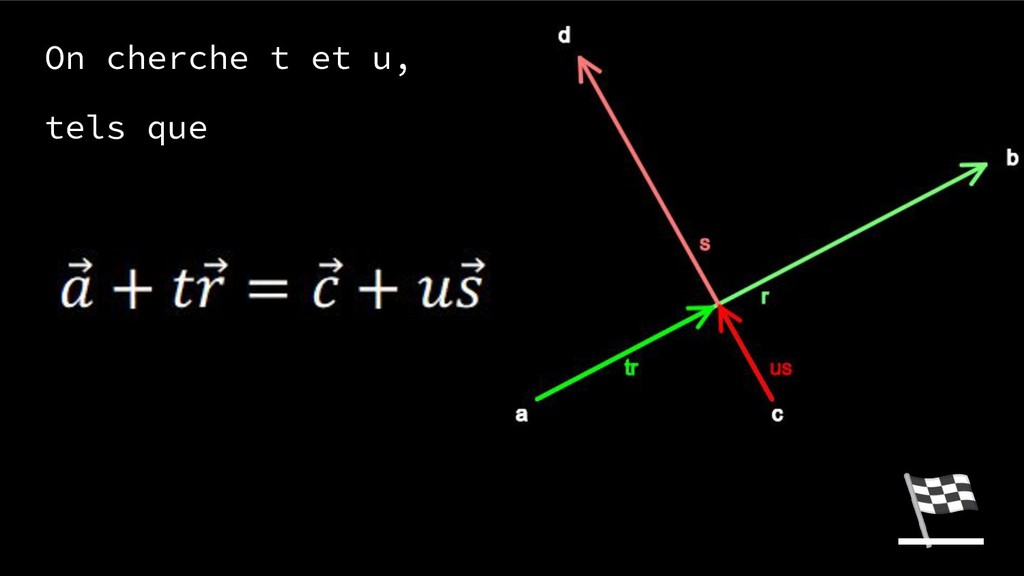
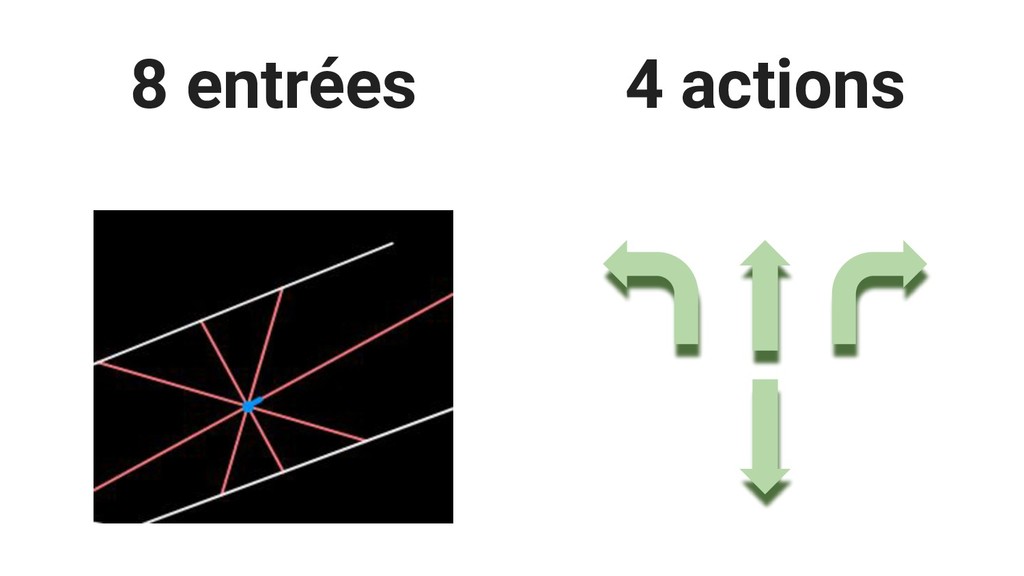
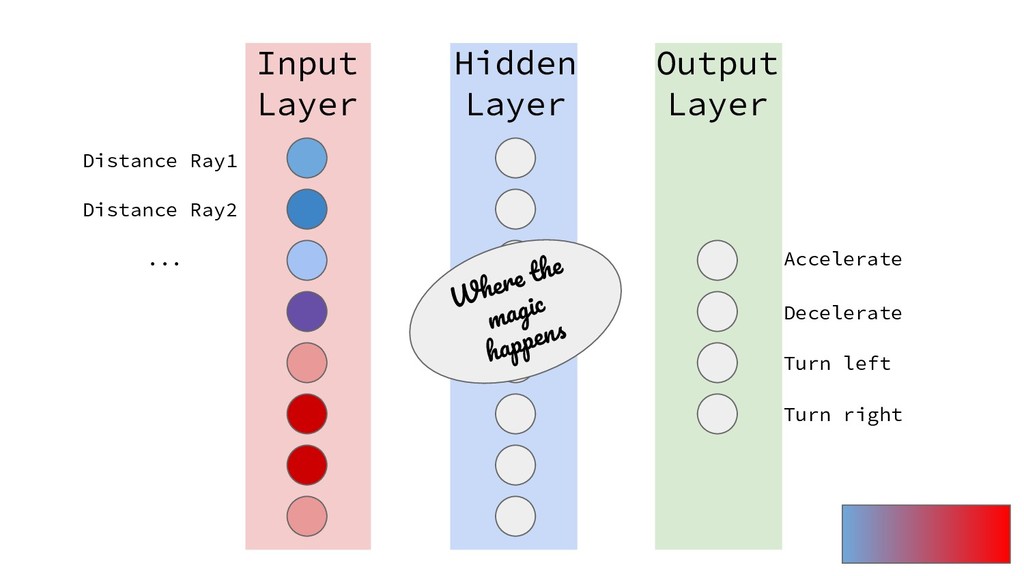
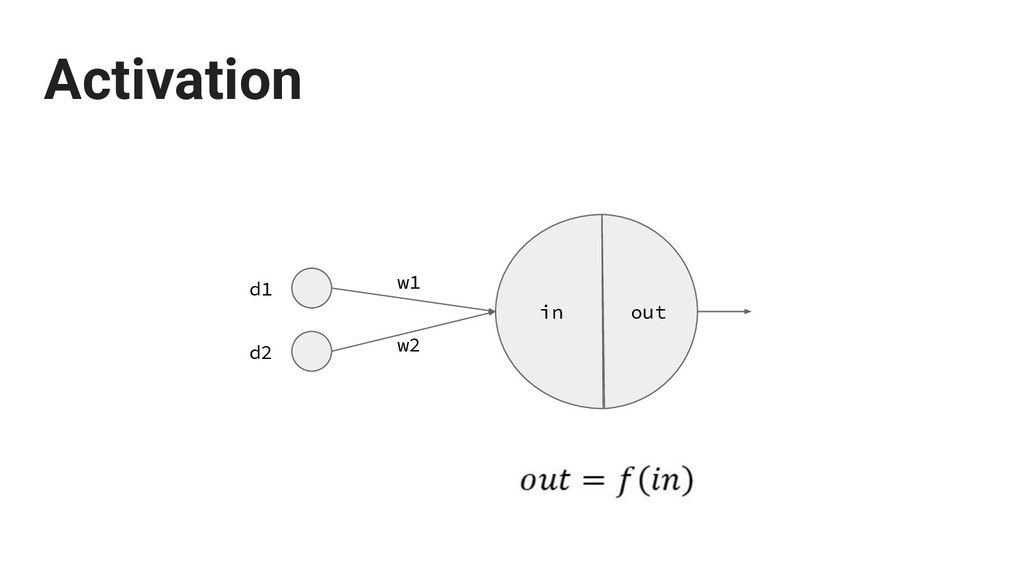
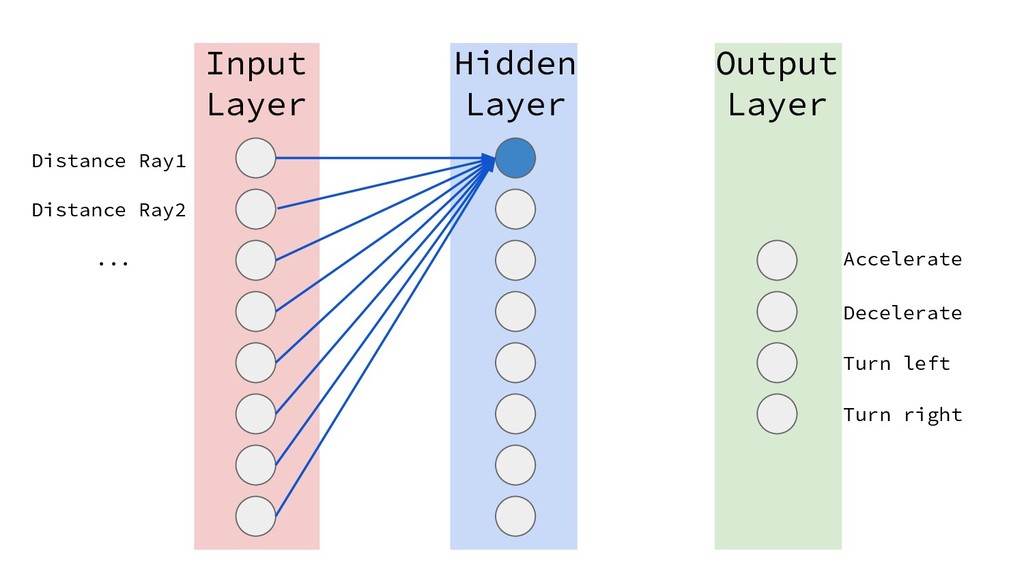
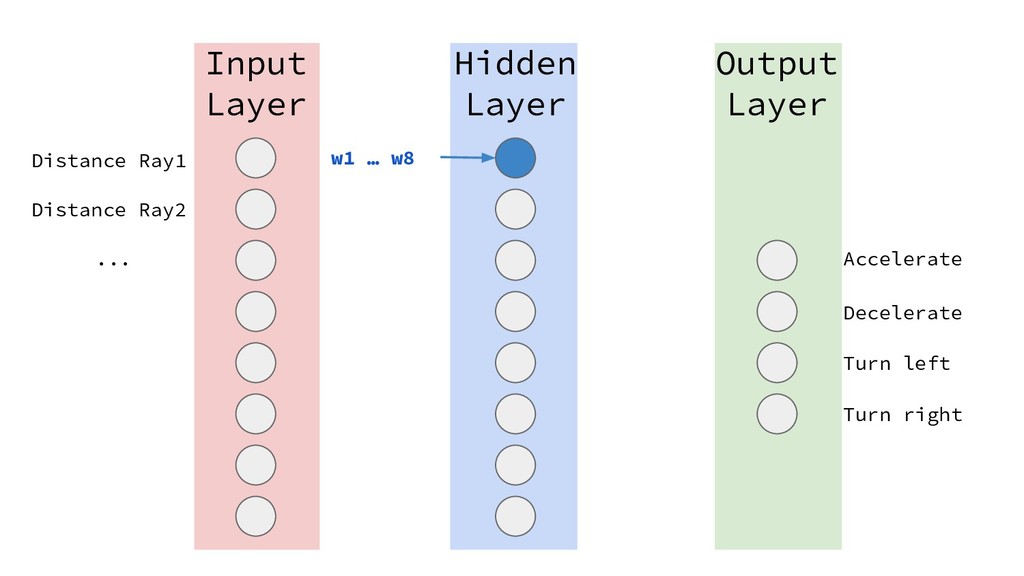
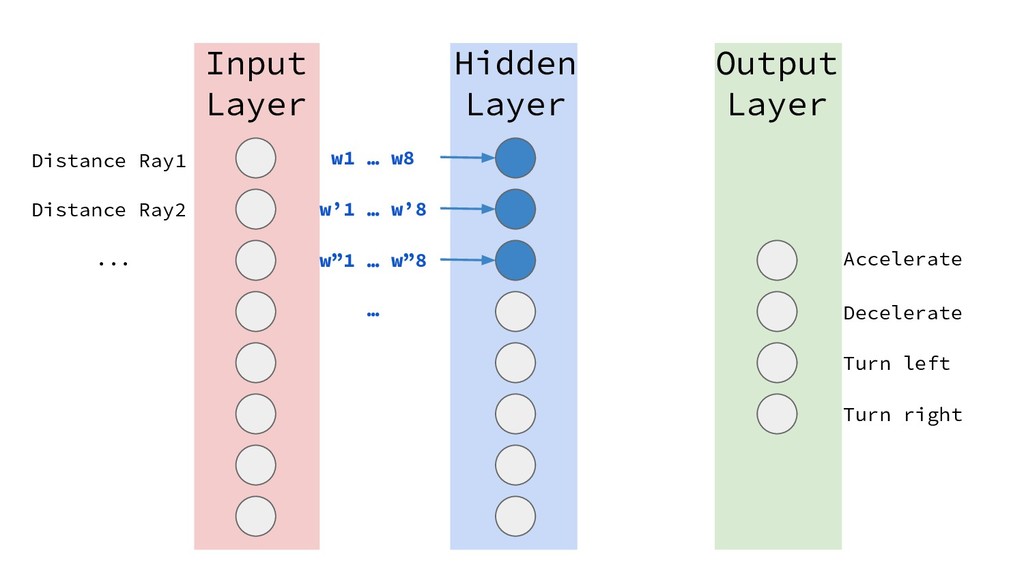
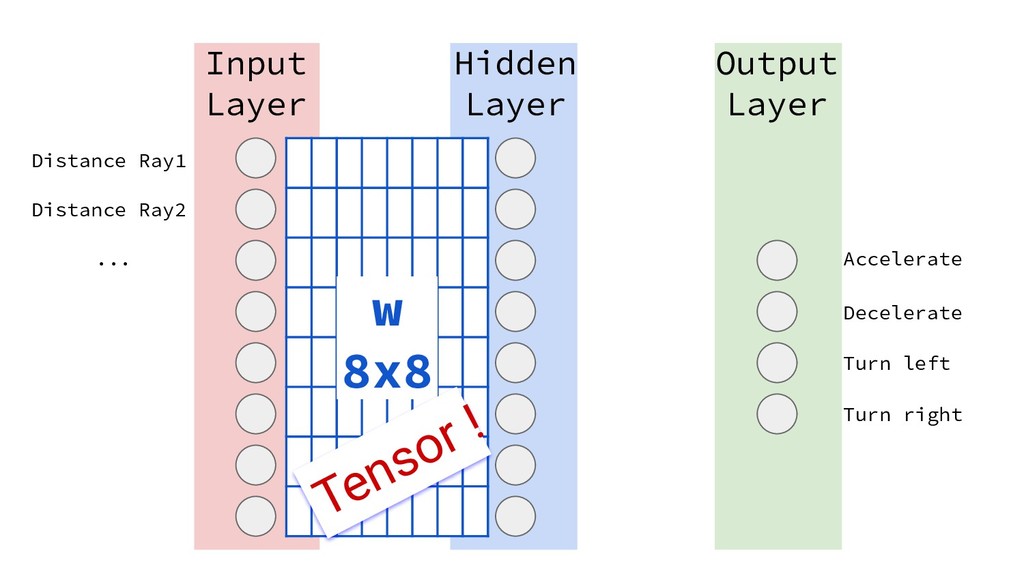
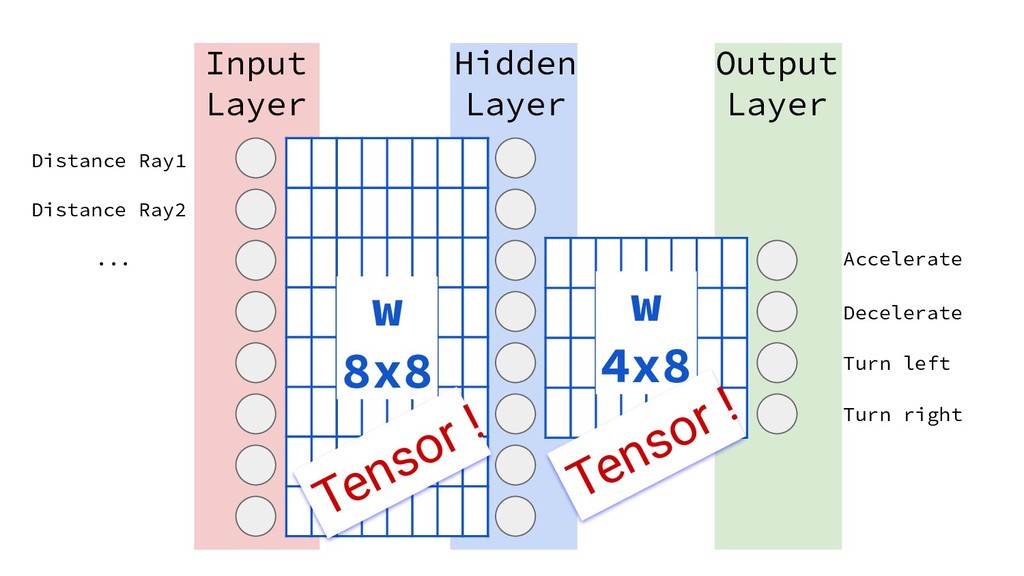
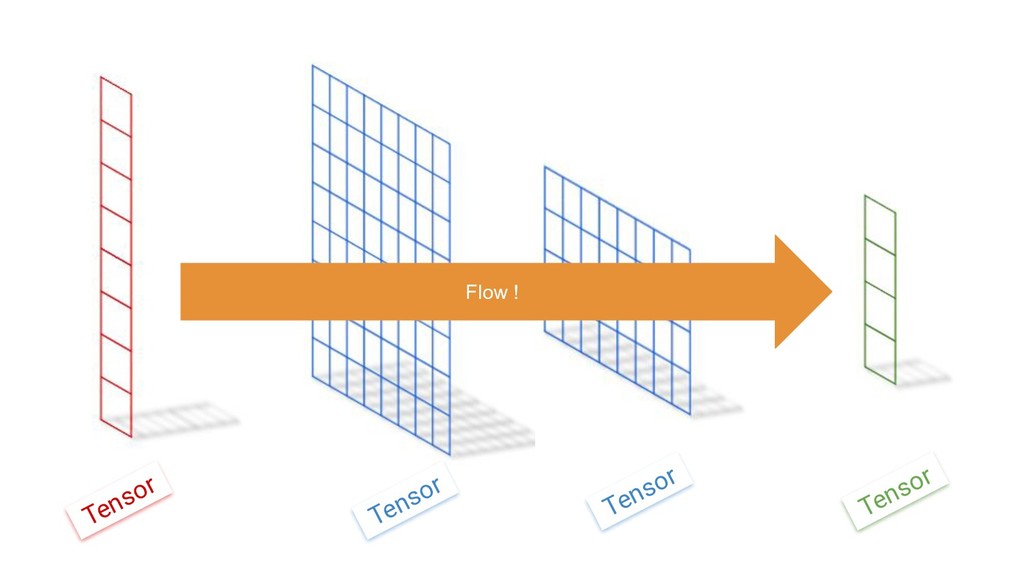
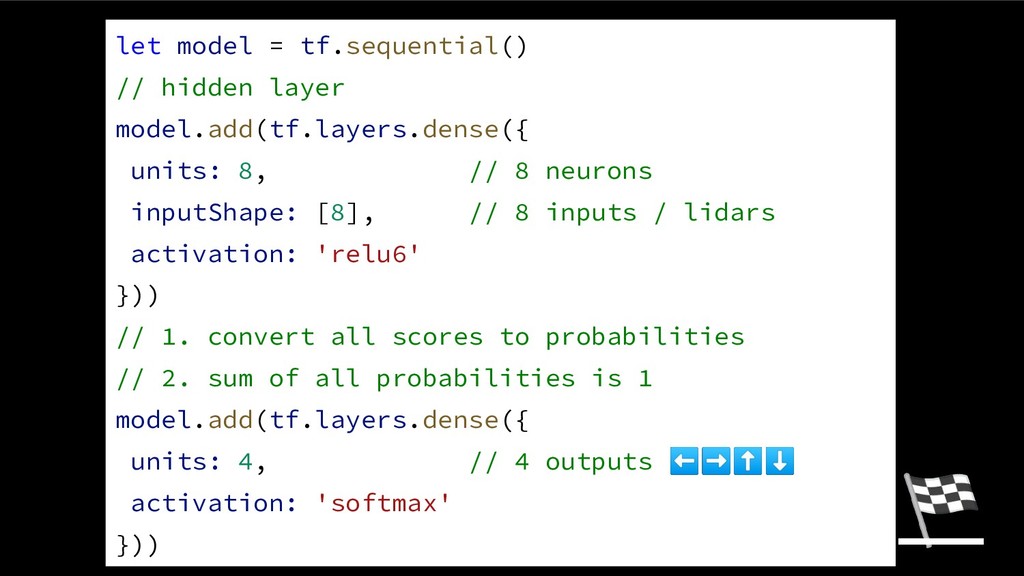
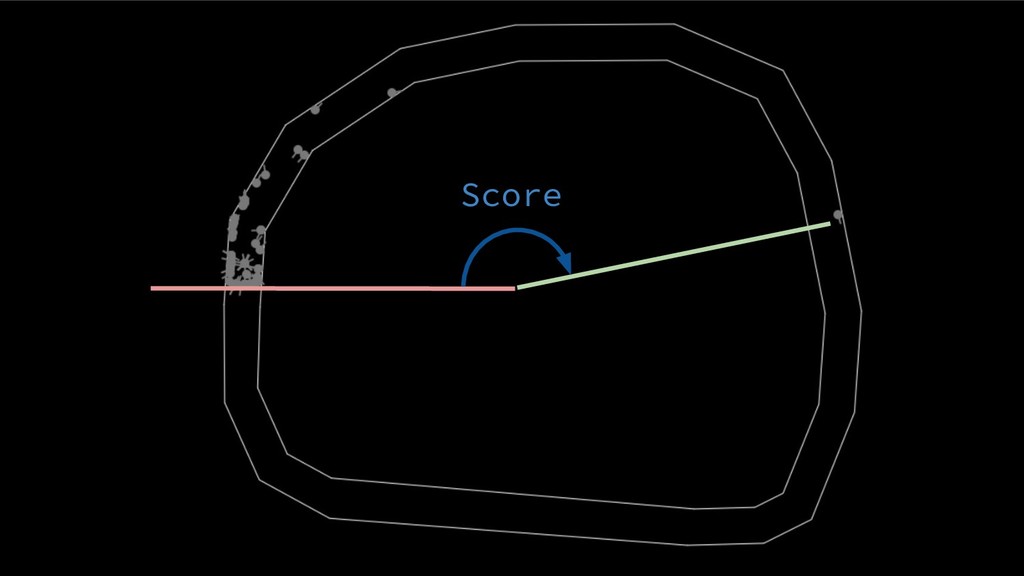
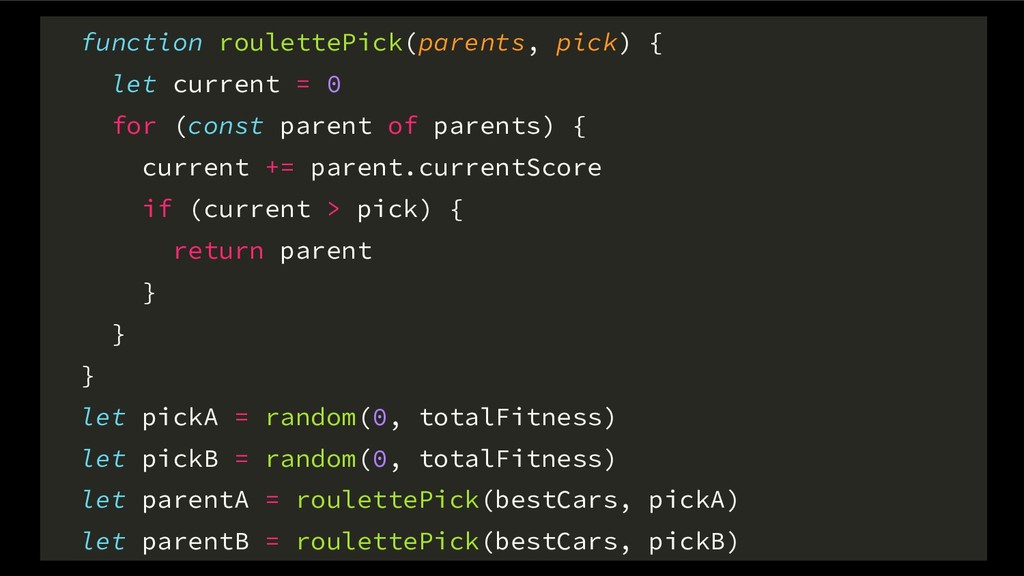
On passera d'abord la première en mettant en place la boucle de jeu avec la physique et le dessin dans un canvas, la seconde, en équipant notre voiture de lidars, puis la troisième en lui greffant un cerveau à base de réseau de neurones artificiels. Et enfin on mettra le turbo, en lui donnant les moyens d'apprendre à se déplacer grâce à la neuroévolution.
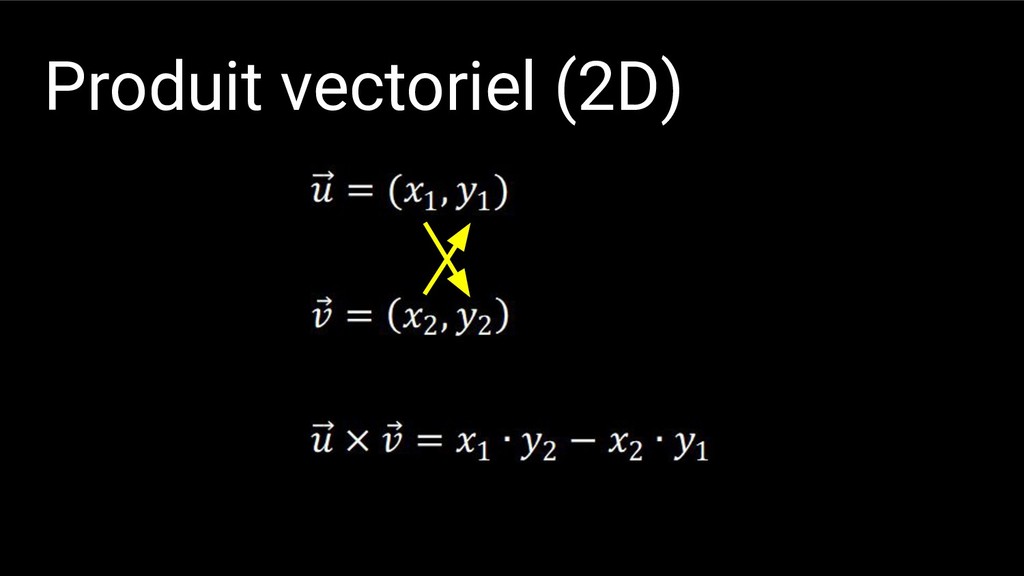
Ce talk cherche à démocratiser au plus grand nombre, les principes de la neuroévolution et des algorithmes génétiques, mais aussi de vous faire découvrir des techniques de gamedev, comme le raycasting, le tout en JavaScript, dans le navigateur.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![class Car { constructor(...) { this.lidar = [] for (let](https://files.speakerdeck.com/presentations/060385f2652c4bee9075dad201583af4/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![cars = [] for (let i = 0; i <](https://files.speakerdeck.com/presentations/060385f2652c4bee9075dad201583af4/slide_59.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}