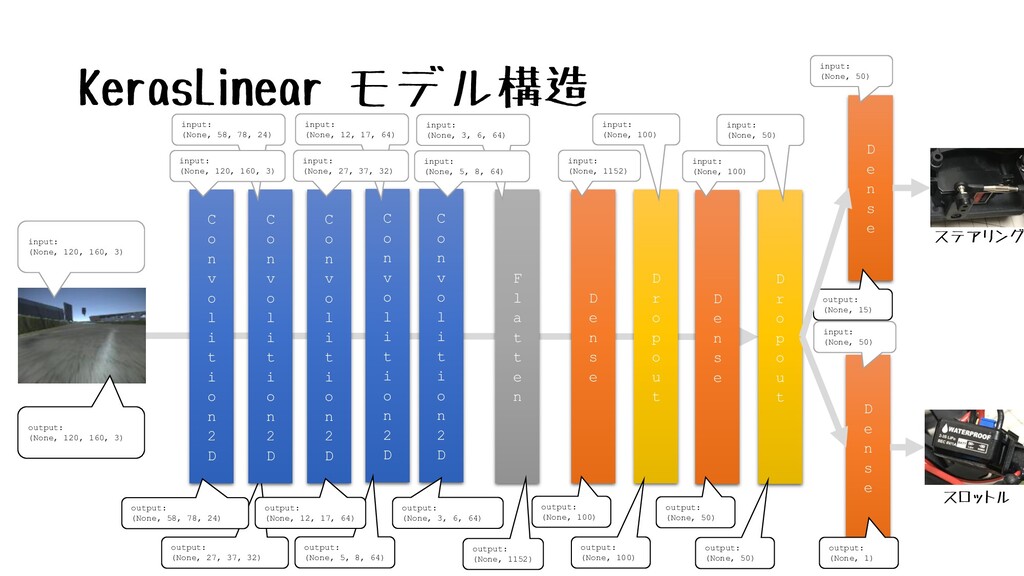
v o l i t i o n 2 D C o n v o l i t i o n 2 D C o n v o l i t i o n 2 D C o n v o l i t i o n 2 D C o n v o l i t i o n 2 D F l a t t e n input: (None, 120, 160, 3) output: (None, 120, 160, 3) output: (None, 58, 78, 24) input: (None, 58, 78, 24) input: (None, 120, 160, 3) output: (None, 5, 8, 64) output: (None, 12, 17, 64) input: (None, 12, 17, 64) input: (None, 27, 37, 32) input: (None, 3, 6, 64) input: (None, 5, 8, 64) output: (None, 1152) output: (None, 3, 6, 64) D e n s e D r o p o u t input: (None, 100) input: (None, 1152) output: (None, 100) output: (None, 100) D e n s e D r o p o u t input: (None, 50) input: (None, 100) output: (None, 50) output: (None, 50) D e n s e input: (None, 50) output: (None, 15) D e n s e input: (None, 50) output: (None, 1) スロットル ステアリング
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![donkeycarセットアップ • Raspberry Piにdonkeycarをインストール • pip install donkeycar[pi] • python](https://files.speakerdeck.com/presentations/ded2eb98b5c74c3cb07e54b7143653f1/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}