Share
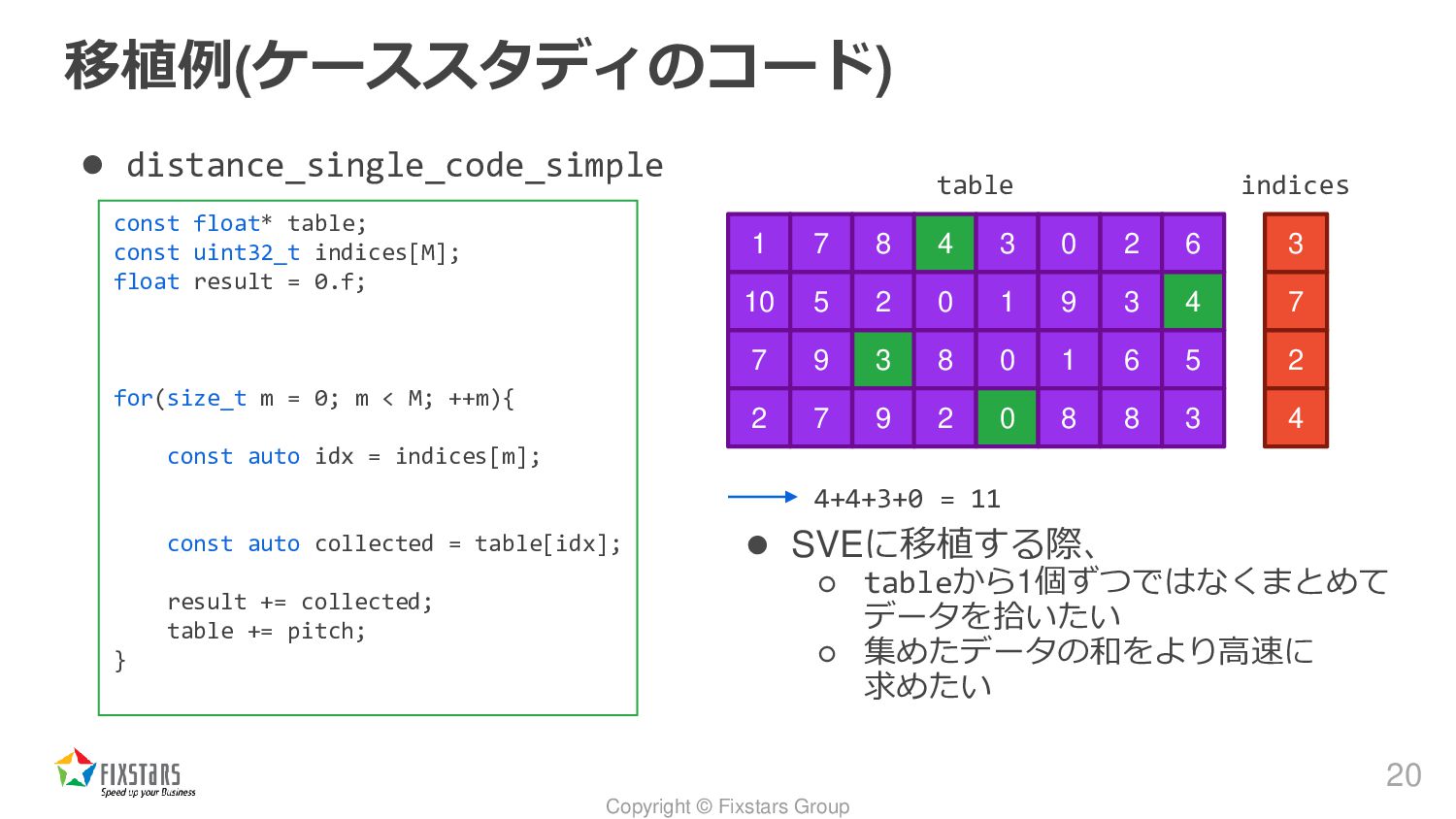
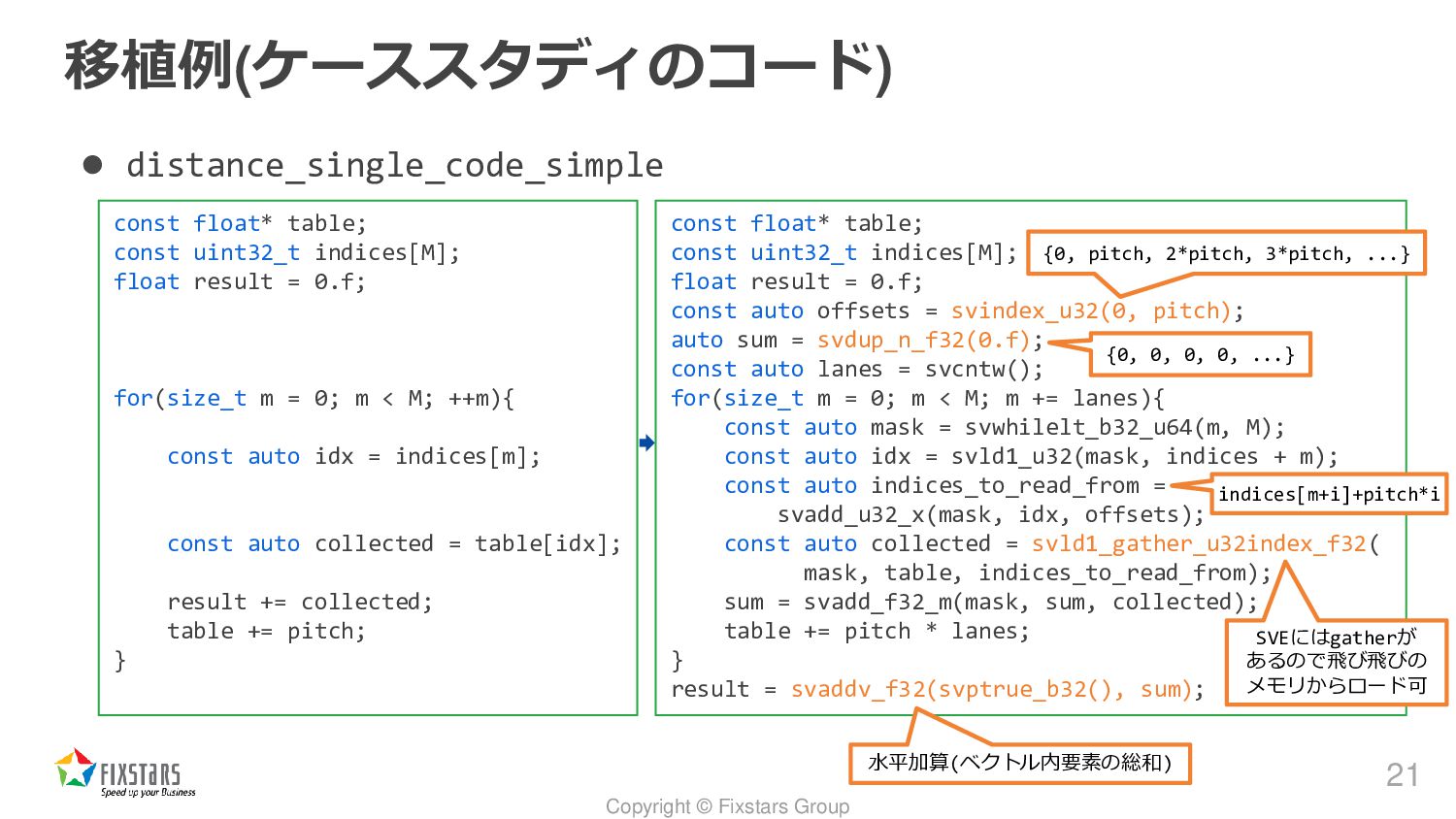
アマゾン ウェブ サービス ジャパン合同会社が2022年10月13日に開催した「AWS 秋の Amazon EC2 Deep Dive 祭り 2022」に、当社のエンジニアが登壇した際の資料です。 「Graviton3の性能を最大限引き出す方法 -ARM SVEを使った事例紹介-」と題したセッションを行いました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Copyright © Fixstars Group Thank you! お問い合わせ窓口 : [email protected]](https://files.speakerdeck.com/presentations/a5c5c61edab34c97ad93bb667d11031d/slide_28.jpg){kind=link}