Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Tigris: Architecture and Algorithms for 3D Perc...
Search
HorizonLab
October 08, 2019
Science
370
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Tigris: Architecture and Algorithms for 3D Perception in Point Clouds
MICRO 2019 Lightning Talk. Presented by Tiancheng Xu.
HorizonLab
October 08, 2019
More Decks by HorizonLab
See All by HorizonLab
Ptolemy: Architecture Support for Robust Deep Learning
horizonlab
0
450
Real-Time Spatio-Temporal LiDAR Point Cloud Compression
horizonlab
0
430
Mesorasi: Architecture Support for Point Cloud Analytics via Delayed-Aggregation
horizonlab
0
710
Building the Computing System for Autonomous Micromobility Vehicles: Design Constraints and Architectural Optimizations
horizonlab
0
330
Low-Latency Proactive Continuous Vision
horizonlab
0
250
Energy-Efficient 360-Degree Video Rendering on FPGA via Algorithm- Architecture Co-Design
horizonlab
0
550
ASV: Accelerated Stereo Vision System
horizonlab
0
380
ASV: Accelerated Stereo Vision System
horizonlab
0
220
Tigris: Architecture and Algorithms for 3D Perception in Point Clouds
horizonlab
0
400
Other Decks in Science
See All in Science
AI bij literatuuronderzoek in de wetenschap
voginip
0
220
[第67回 CV勉強会@関東] CV × Scientific Figures / kantoCV 67th CVPR 2026
lychee1223
0
140
ダメな自分の育て方―性格タイプの「劣等機能」から理解するニガテ克服術
ppillc
0
220
Inside the Mind of an LLM
baggiponte
0
200
Physical AIを支えるWeights & Biases
olachinkei
1
420
Tensor Factorization Meets Deformed Information Geometry: Convex Relaxation under Deformed Algebra
gkazunii
0
110
大黒市で発生した大規模インシデント の ポストモーテムから読み解く、 記憶媒体消去の大切さ
shucho0103
0
210
CVPR2026_VGGTとその仲間たち
mickey_0226
0
980
機械学習 - 授業概要
trycycle
PRO
0
560
見上公一.pdf
genomethica
0
170
データベース01: データベースを使わない世界
trycycle
PRO
1
1.3k
J-STAGE全文XML登載必須化について
xspa2012
0
1.2k
Featured
See All Featured
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
290
Exploring the relationship between traditional SERPs and Gen AI search
raygrieselhuber
PRO
2
4.1k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.8k
Leadership Guide Workshop - DevTernity 2021
reverentgeek
1
320
How to Ace a Technical Interview
jacobian
281
24k
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
360
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
610
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
How to Talk to Developers About Accessibility
jct
2
410
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
The World Runs on Bad Software
bkeepers
PRO
72
12k
Transcript
!1 Tigris: Architecture and Algorithms for 3D Perception in
Point Clouds Tiancheng Xu*, Boyuan Tian* with Yuhao Zhu Department of Computer Science University of Rochester http://horizon-lab.org
To-do: add Notre Dame Cathedral figure Goal: Intro 2 Source:
https://www.nationalgeographic.com/news/2015/06/150622-andrew-tallon-notre-dame-cathedral- laser-scan-art-history-medieval-gothic/
3 3D Reconstruction from Laser Scanning Data of the Cathedral
Source: https://www.nationalgeographic.com/news/2015/06/150622-andrew-tallon-notre-dame-cathedral- laser-scan-art-history-medieval-gothic/
4 Point Cloud Registration
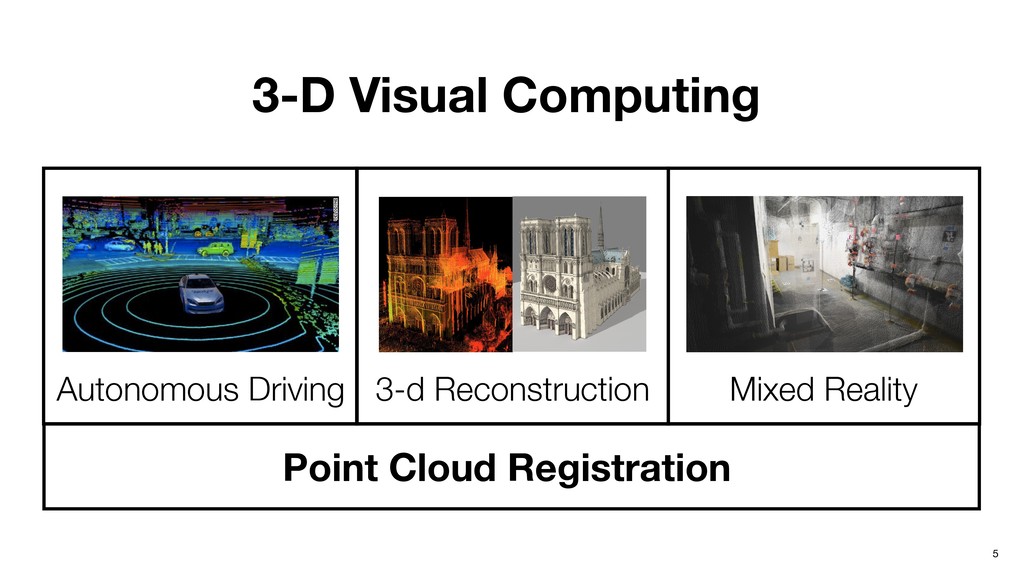
5 3-d Reconstruction Autonomous Driving Mixed Reality 3-D Visual Computing
Point Cloud Registration
6 Real-Time Energy-Efficient Point Cloud Registration
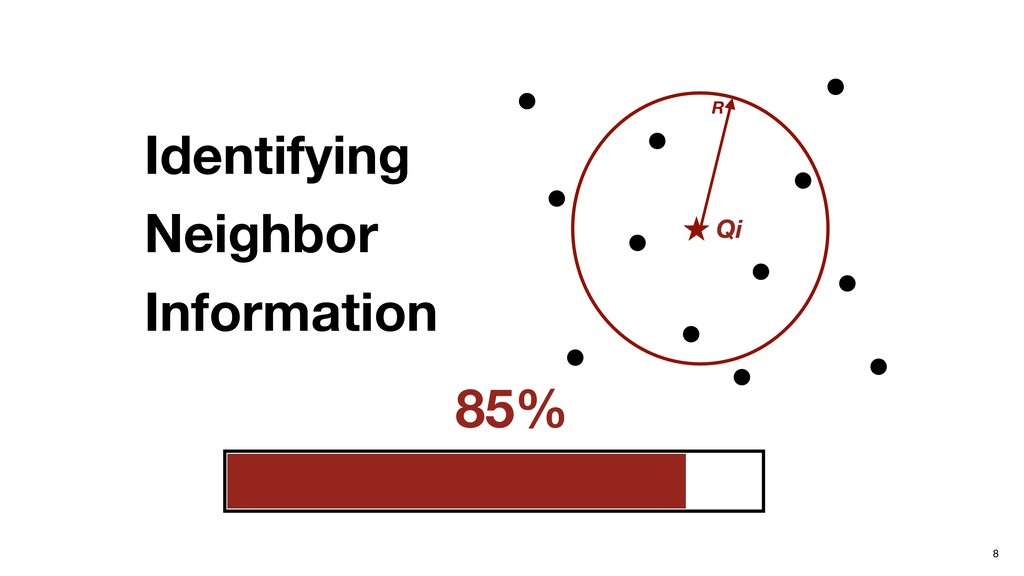
7 Identifying Neighbor Information Qi R
8 Identifying Neighbor Information Qi R 85%
9 Data Structure Algorithms Hardware Architecture Tigris
10 20.9X Speedup 10.5X Power Reduction Performance Bottleneck
11 3.5X Speedup 3.0X Power Reduction End-to-end Pipeline
12 Session V-A: Domain Specific Accelerators Tuesday, 2:30 PM
Best Paper Nominee
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}