Presented at PyDays Vienna 2018
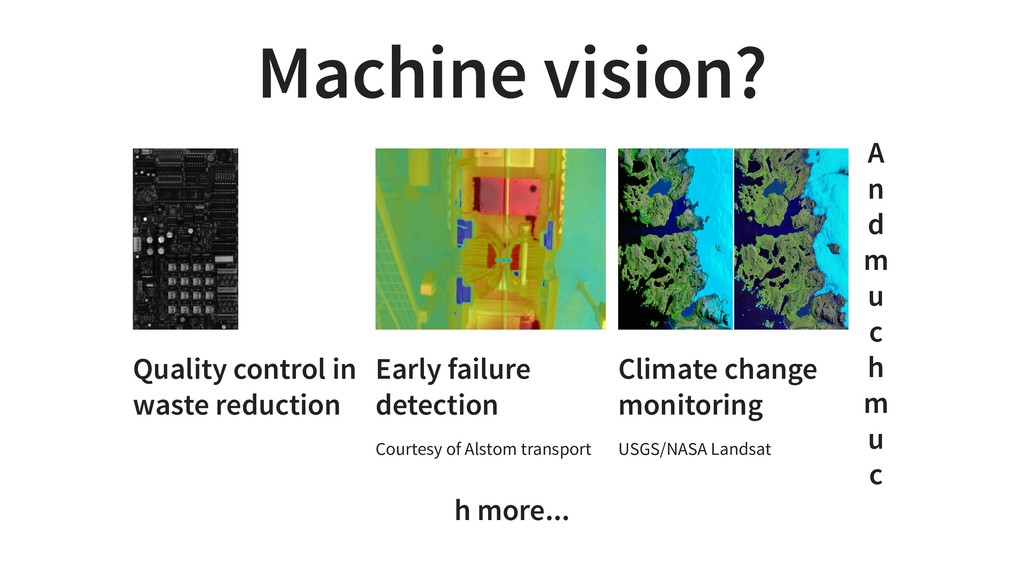
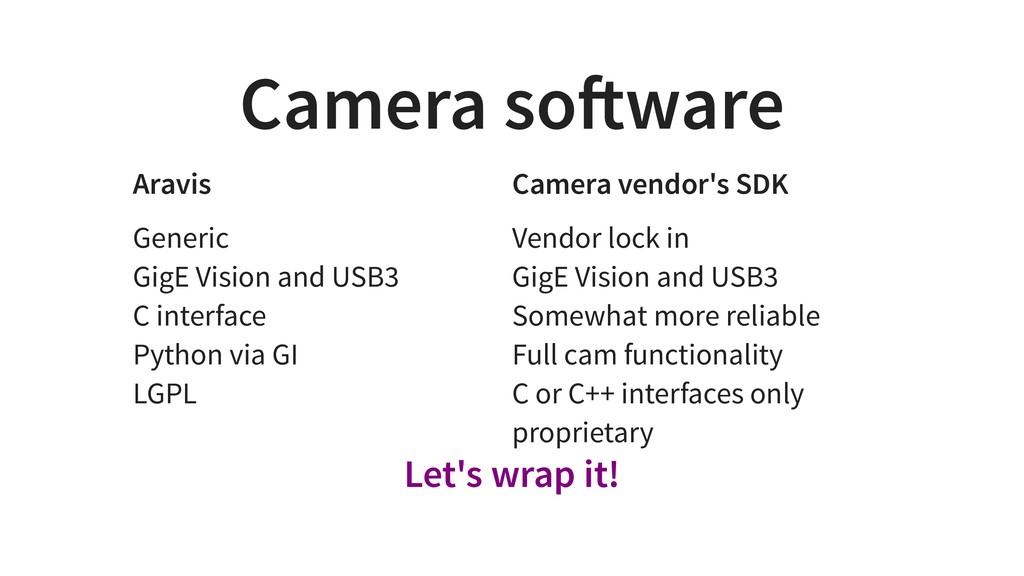
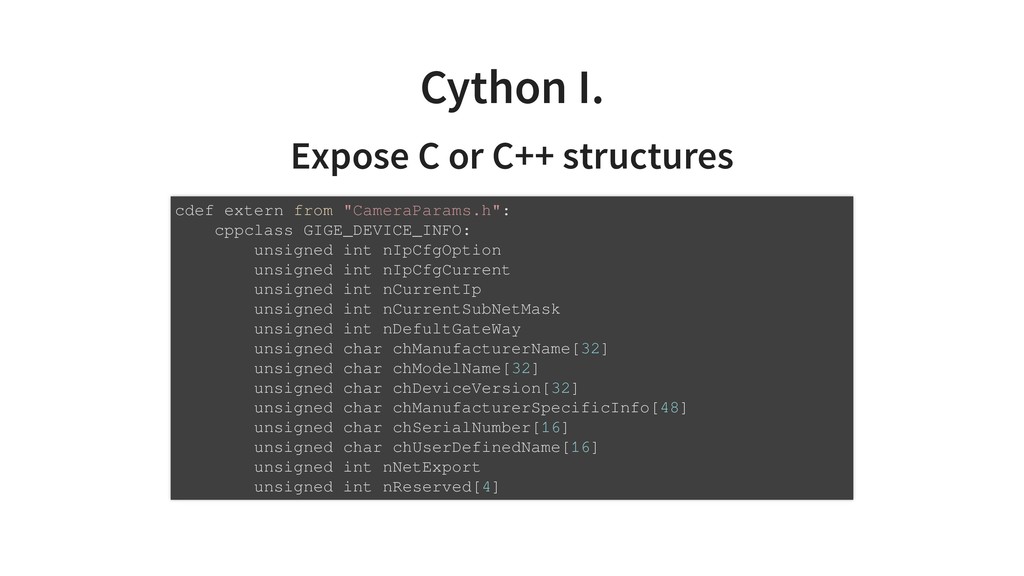
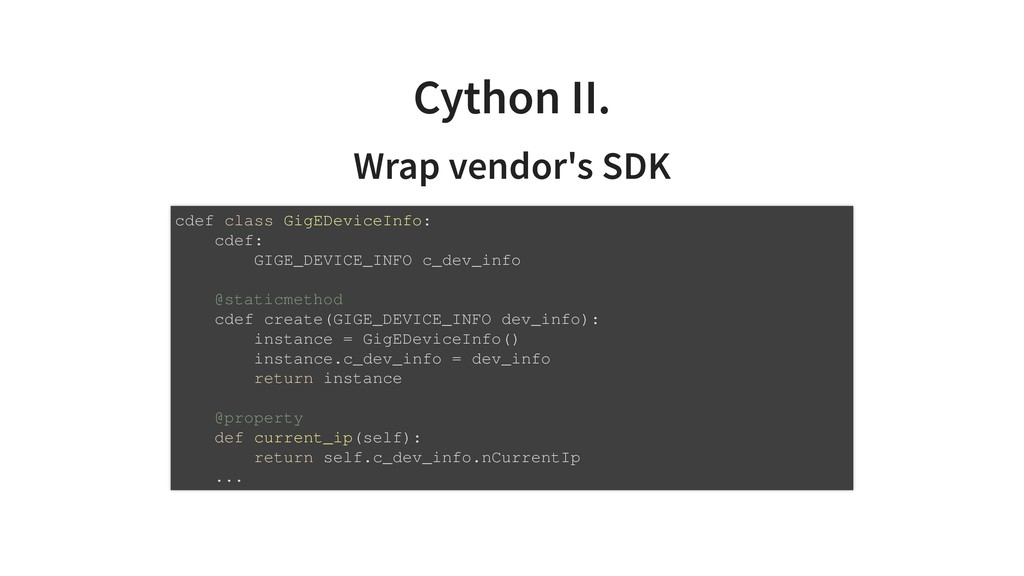
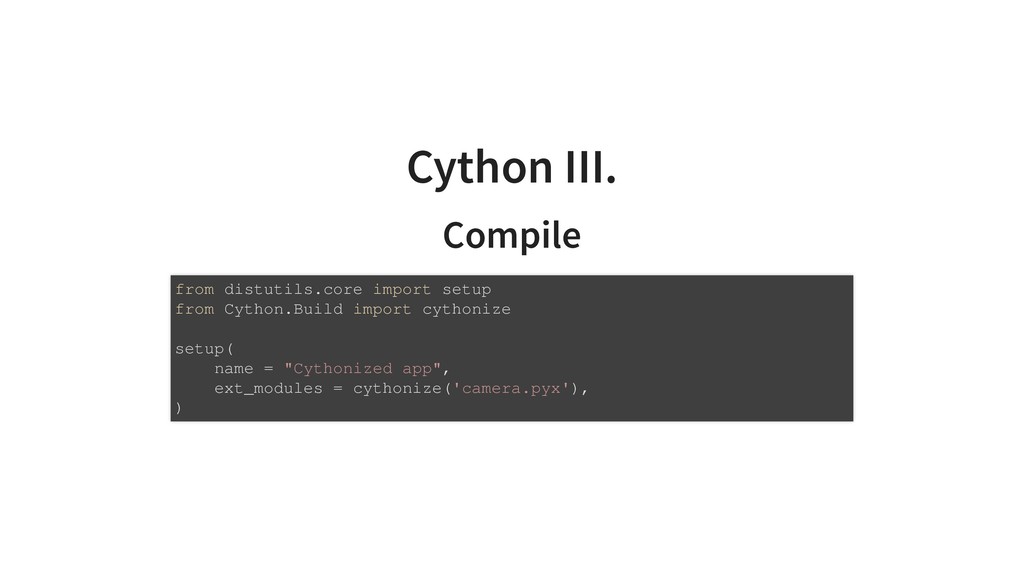
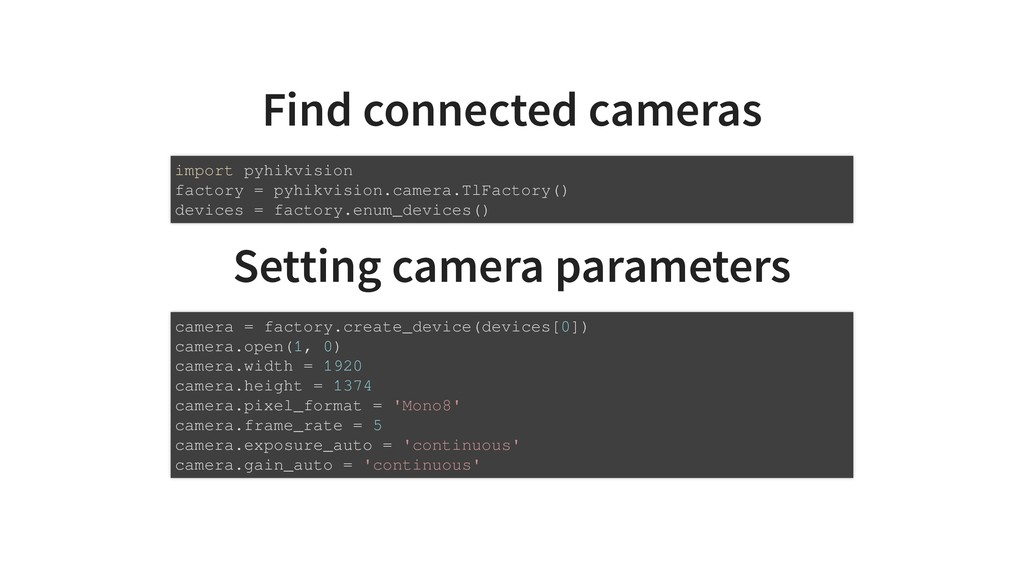
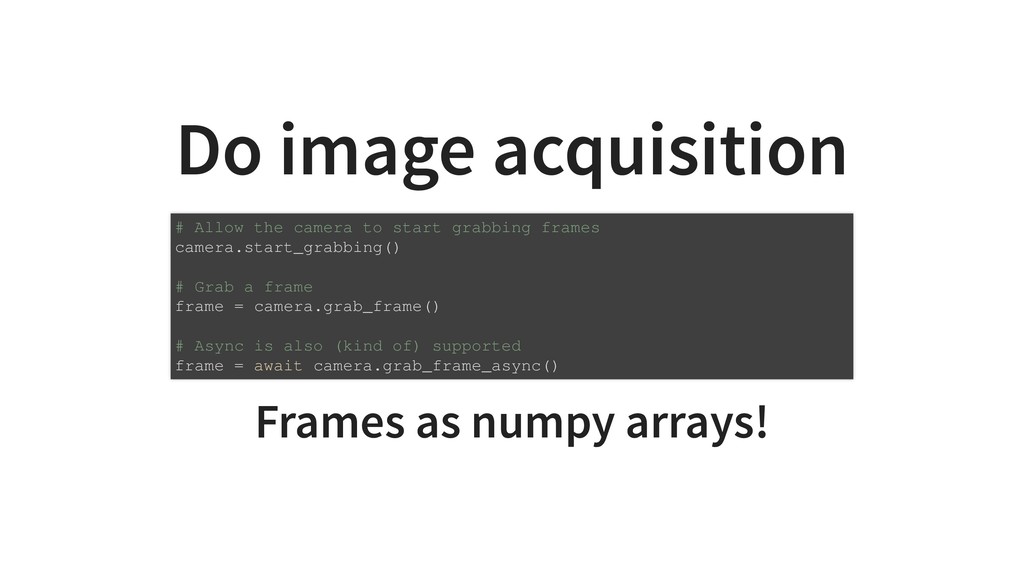
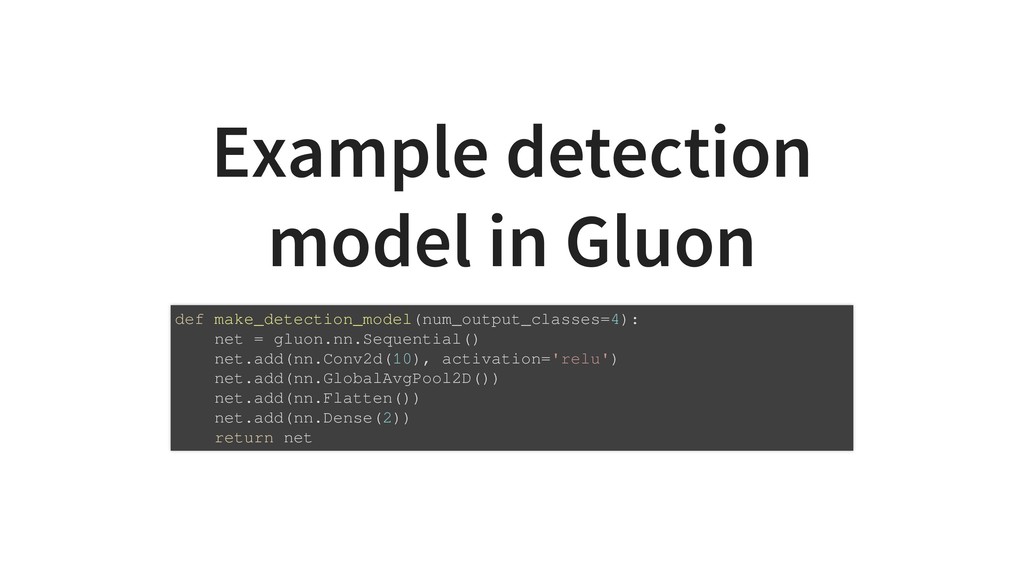
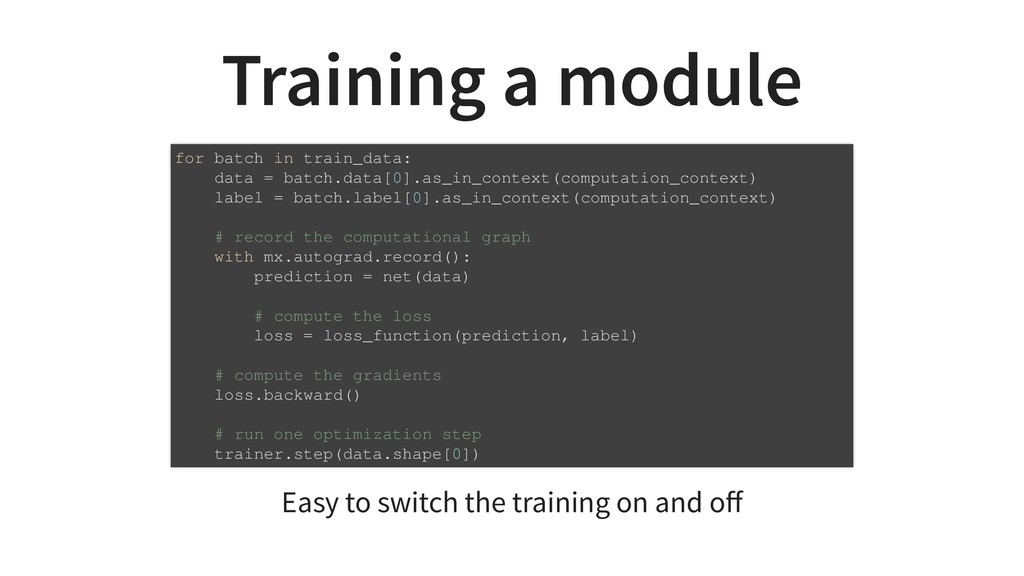
This talk explores how we, at KardioMe, build computer vision systems that help reducing waste in industrial production. We will first have a look at wrapping of C++ interfaces of industrial cameras in Cython. We will then explore development machine learning models that are able to interpret the image content, and detect failures early. Writing reusable modules in libraries with dynamic code execution (like Gluon) can make such task much simpler.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
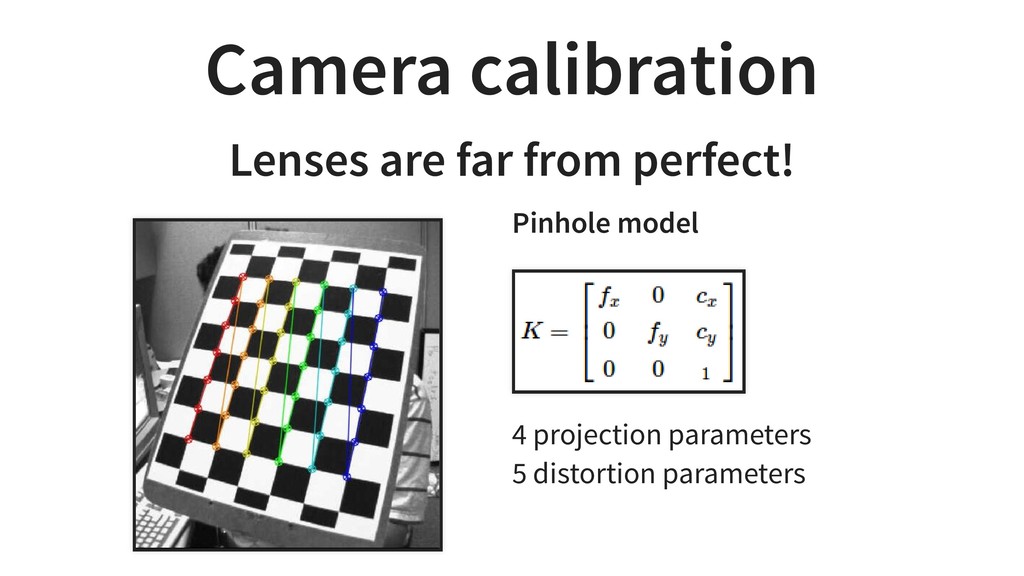
![Camera calibration with OpenCV Undistort images image_points, object_points = [],](https://files.speakerdeck.com/presentations/3dc7ac9b423347ca9dab36e6ab3b00da/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}