EMIKA Panda Robot ◼ 評価指標:ユーザによる採点 ◼ ゴール状態との差分を正確に測定できないため ② シミュレーション:ablation study ◼ 1-9個の物体を含む200シーンを使用 ◼ 評価指標 ◼ Median rotation error [°] ◼ Median position error [cm] ◼ 位置および角度の差分が閾値未満である(= rearrangementに成功している)物体の割合 [%] 11 https://www.directindustry.com/ja/prod/franka-emika/product-187686-1906234.html
{kind=link}
{kind=link}
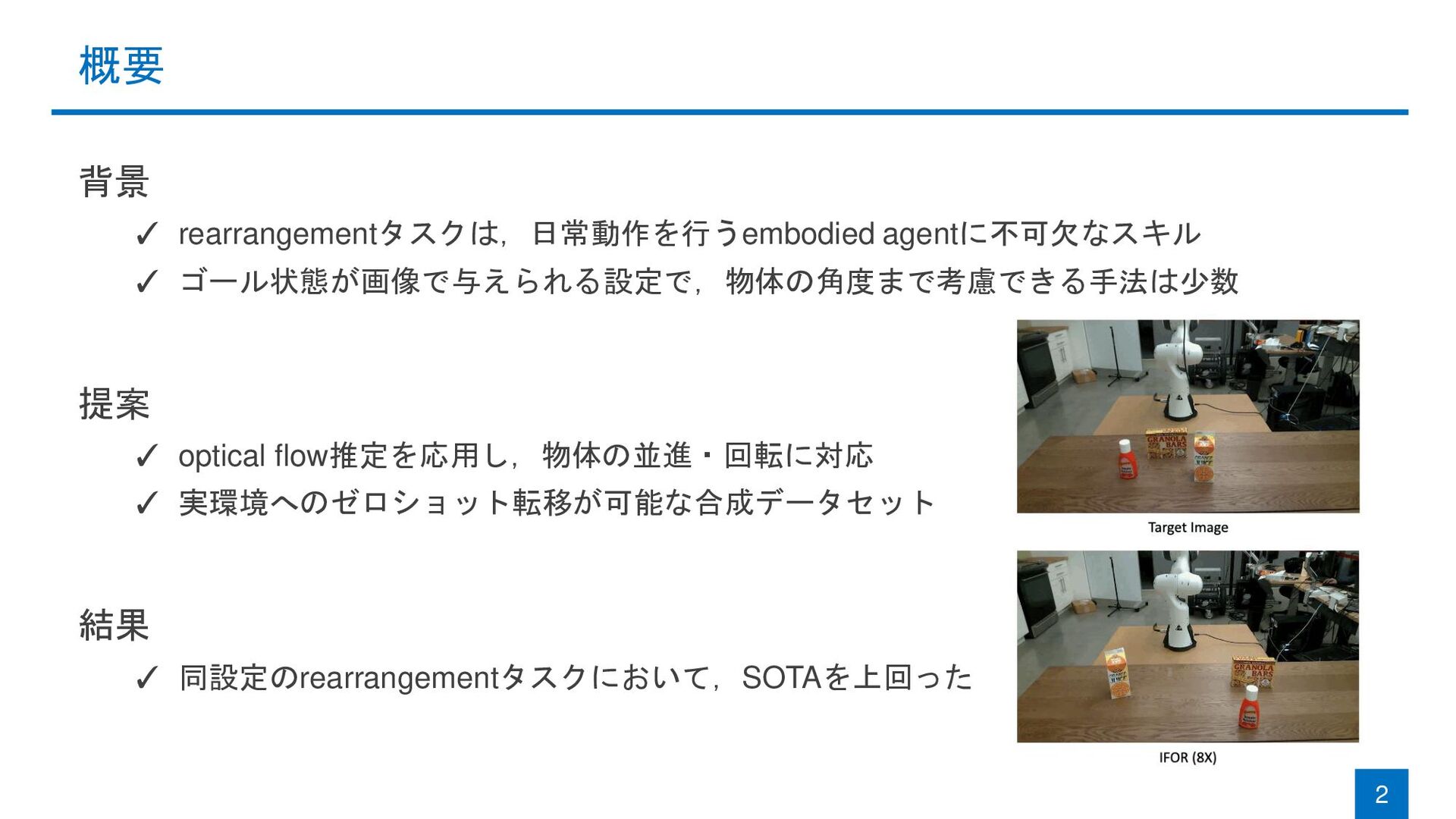
![背景:rearrangementタスクは生活支援ロボットに不可欠なスキル ◼ object rearrangement [Batra+, 20] ◼ 現在の状態から望ましいゴール状態へ変化させる物体操作 ◼ 例:食卓を整える,机上を片付ける等](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_2.jpg){kind=link}
![関連研究:ゴール状態の与え方を多様に定義 4 手法 概要 NeRP [Qureshi+, RSS21] ・ゴール状態:RGB-D画像 → 本研究と同様](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
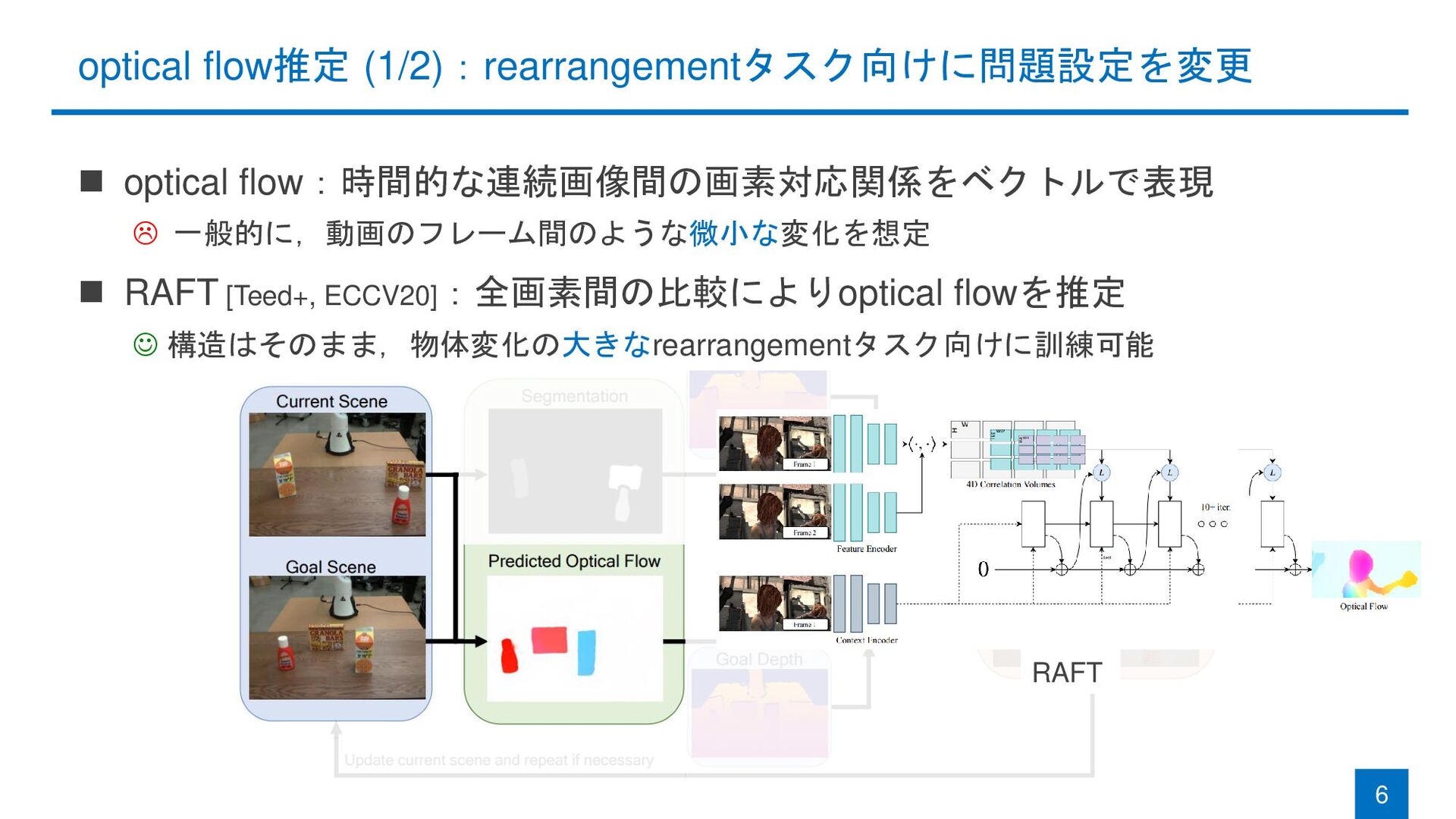
![optical flow推定 (2/2):合成データセットを用いてRAFTを訓練 ◼ photo-realisticなレンダラ:NViSII [Morrical+, 21] ◼ 光源,背景,支持物体のテクスチャ、カメラ視点等を無作為に変更 ◼](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_6.jpg){kind=link}
![未知物体のセグメンテーション:「物体らしさ」の情報を獲得 ◼ UCN [Xiang+, CoRL20]:RGB-D画像を入力とするセグメンテーション手法 ◼ 同物体のピクセルに対して似た埋め込み表現を与え,インスタンスをクラスタリング ◼ 目的:optical flowに欠ける物体形状に関する情報を補足](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_7.jpg){kind=link}
{kind=link}
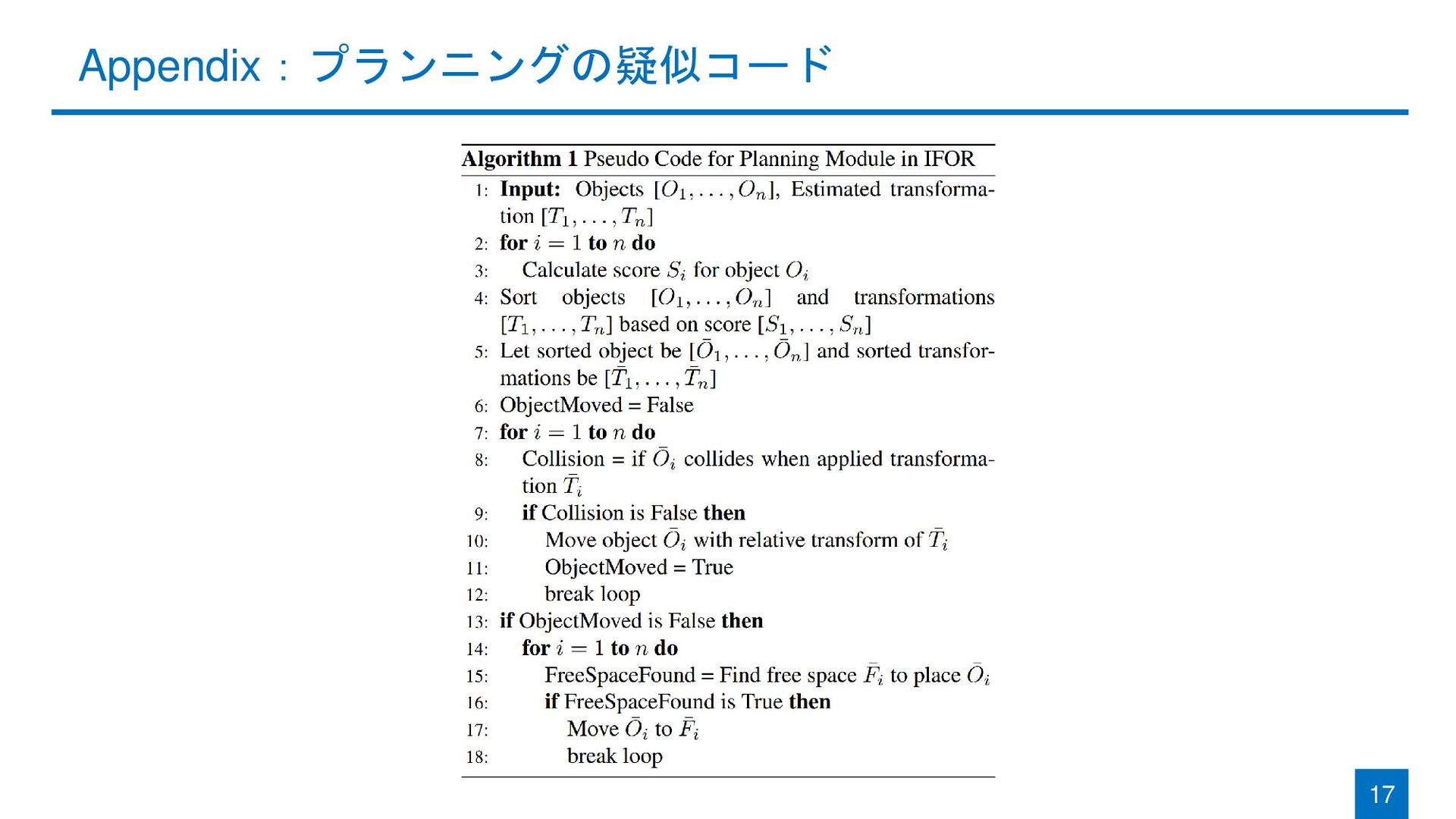
![プランニング:pick-and-placeタスクの実行 ◼ 衝突しない物体のうち,変換が大きい(= スコア が高い)ものから実行 ◼ 衝突予測:SceneCollisionNet [Danielczuk+, ICRA20] ◼](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_9.jpg){kind=link}
![実験設定:実機・シミュレーションの両環境で評価 ① 実機:SOTAであるNeRP [Qureshi+, RSS21] と比較 ◼ 2-5個の未知物体を含む6シーンを使用 ◼ ロボット:Franka](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Appendix:RANSAC [Fischler+, ACM81] ◼ 外れ値の影響を抑制 ◼ 大幅に誤った対応点を予測したケース(= 多数存在)に対処 16 変換例](https://files.speakerdeck.com/presentations/db65235c93cd4a56b704d98bf7d3fd54/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}