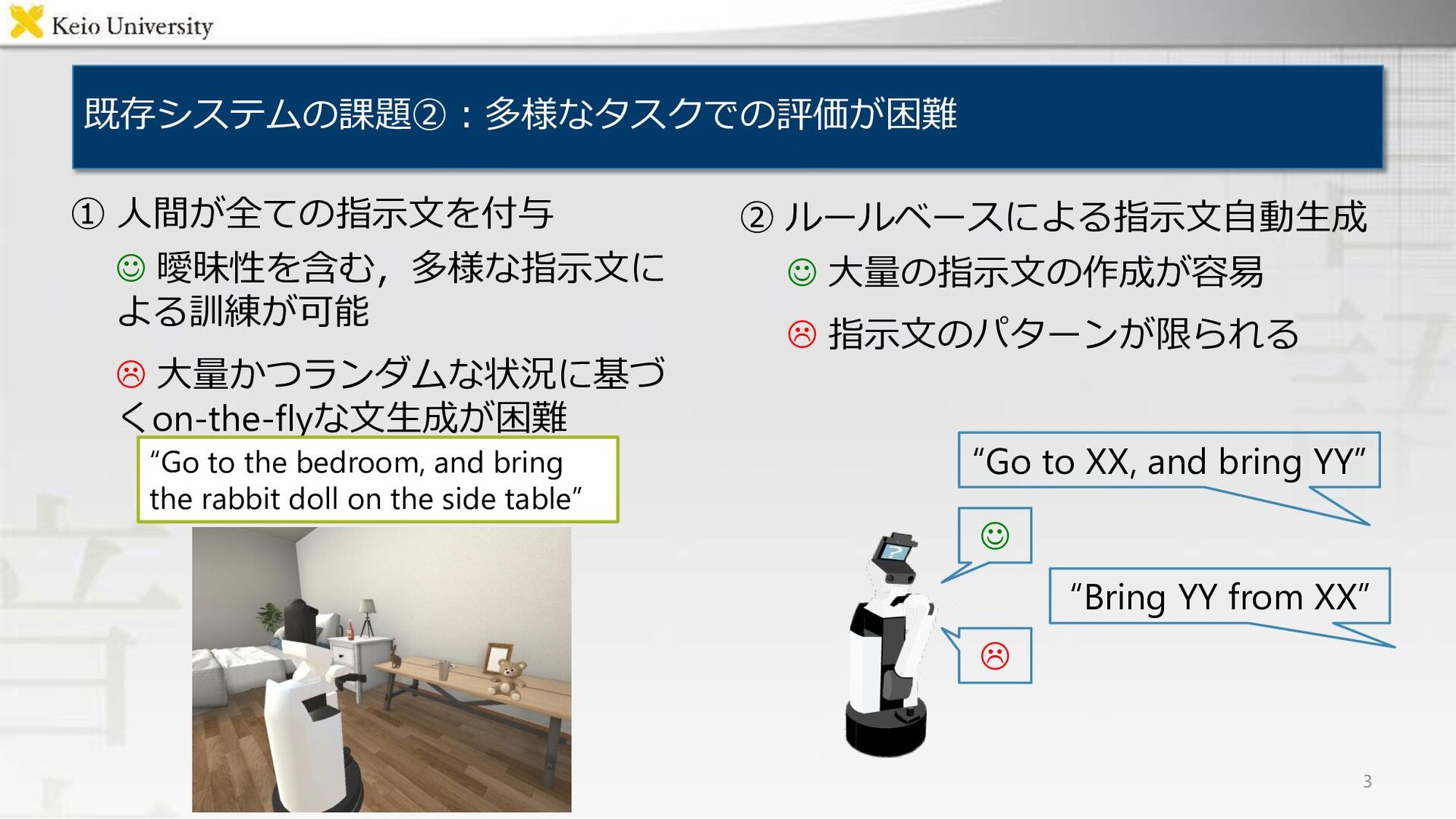
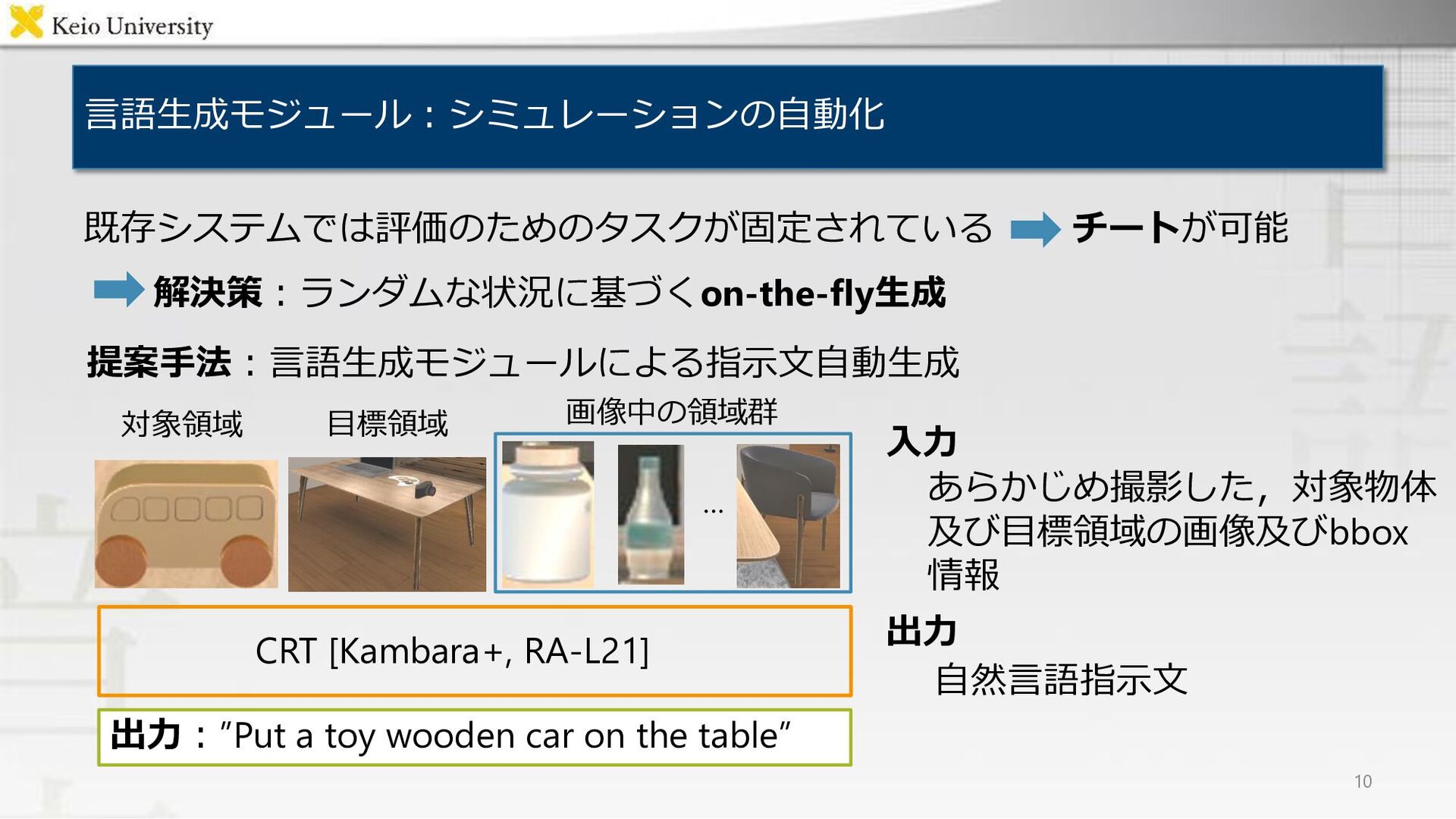
大量かつランダムな状況に基づ くon-the-flyな文生成が困難 ☺ 大量の指示文の作成が容易 指示文のパターンが限られる “Go to the bedroom, and bring the rabbit doll on the side table” “Go to XX, and bring YY” ☺ “Bring YY from XX”
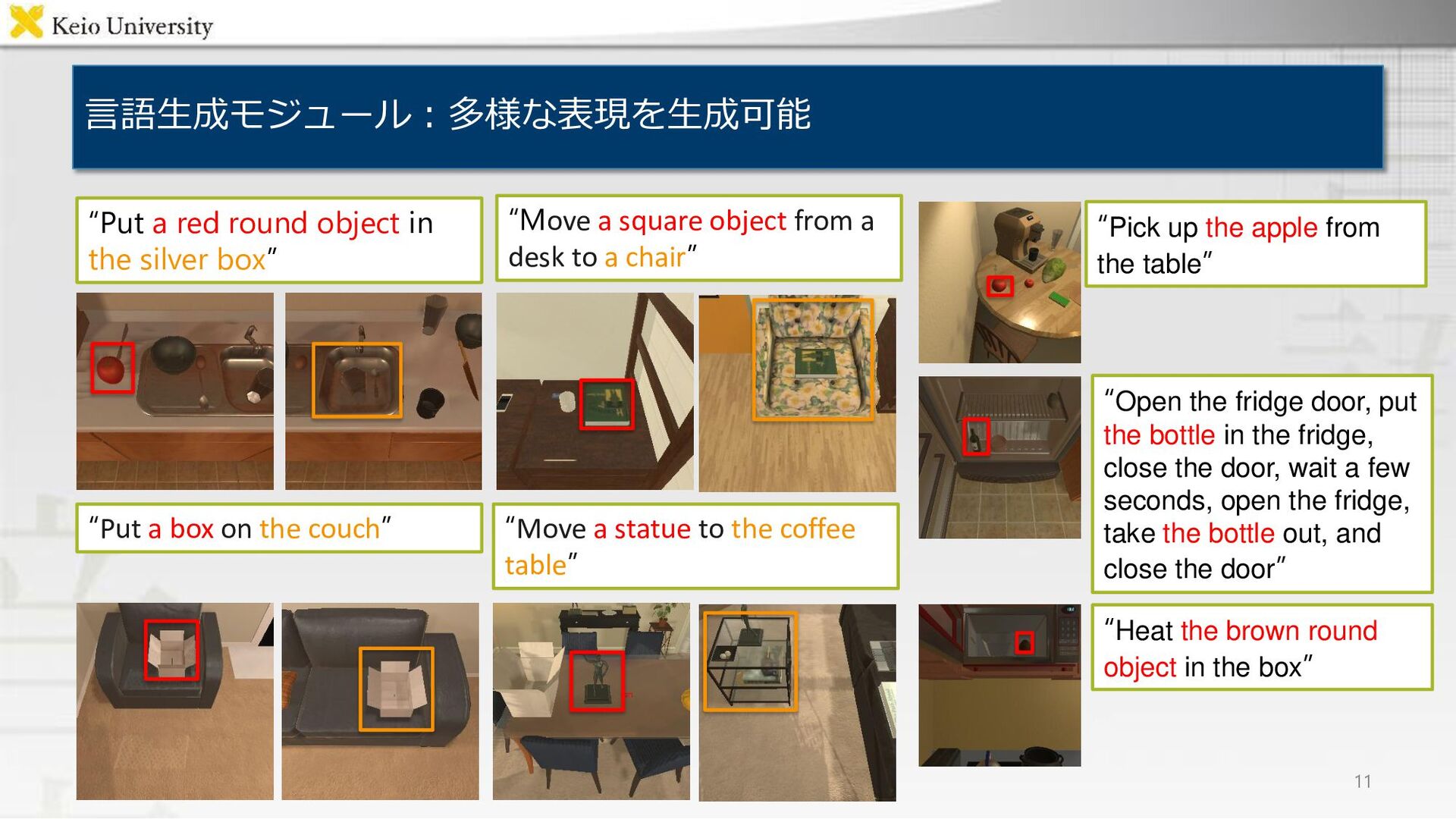
box” “Move a square object from a desk to a chair” “Put a box on the couch” “Move a statue to the coffee table” “Pick up the apple from the table” “Open the fridge door, put the bottle in the fridge, close the door, wait a few seconds, open the fridge, take the bottle out, and close the door” “Heat the brown round object in the box”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![関連研究: Fetch-and-carryタスクにおいて,生成と理解を同時に扱う手法はない 4 手法 概要 OMT [Fukushima+, ICRA22] Transformerを利用したObject goal](https://files.speakerdeck.com/presentations/0e7e8185aa6e428f9635101f181973da/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
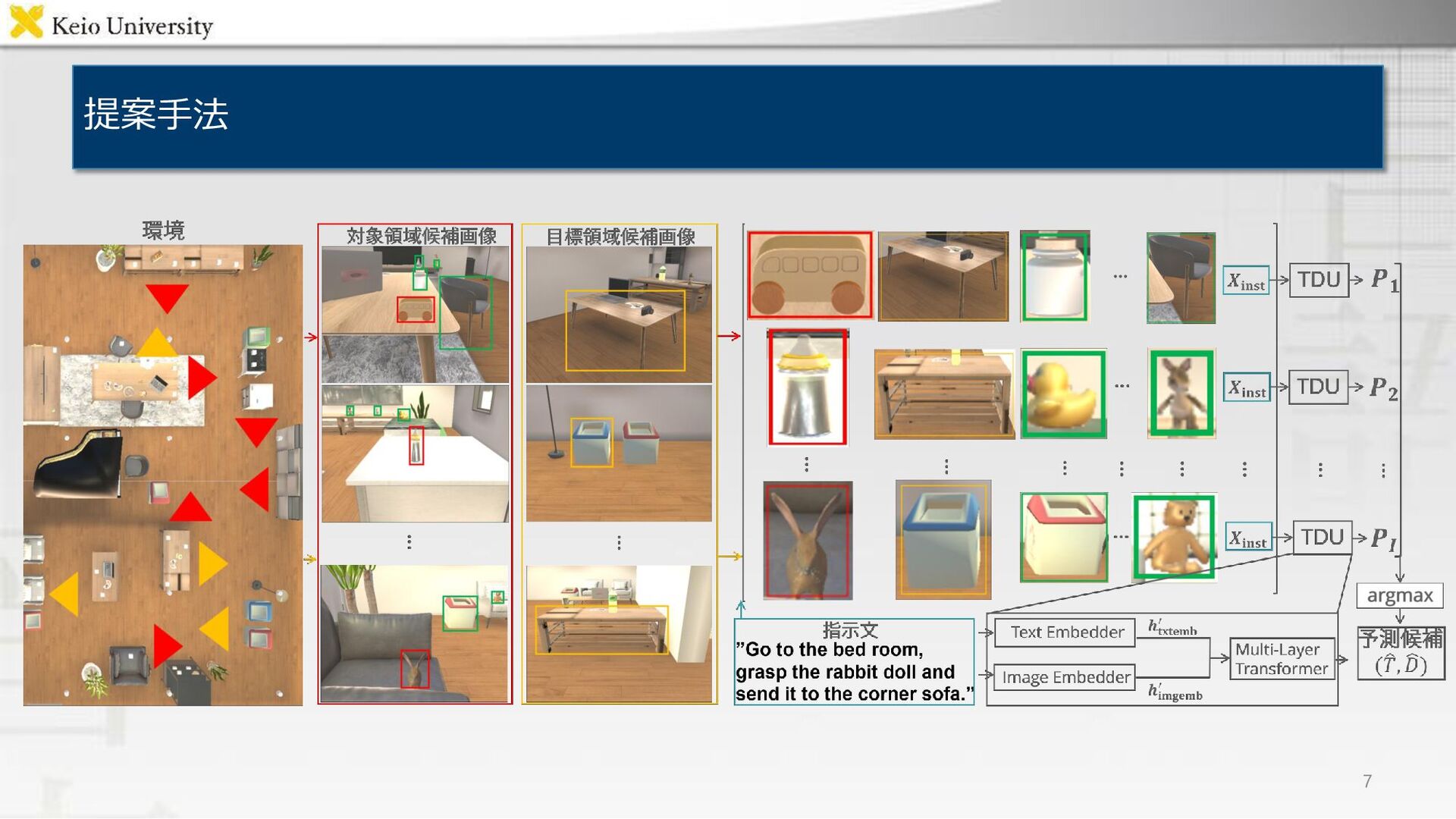
![言語理解モジュール:複数候補から最適な組を決定 9 ベース:Target-dependent UNITER [Ishikawa+, RA-L21] 入力:複数の対象物体,目標領域の 候補のペア 出力:各ペアが正解のペアであるか についての確率の予測値](https://files.speakerdeck.com/presentations/0e7e8185aa6e428f9635101f181973da/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
![人手によるコーディングとは乖離がある一方,学習ベース手法によりルール ベース作成されたタスクの実行に成功 12 手法 Object grounding 精度 [%] 物体把持 成功率](https://files.speakerdeck.com/presentations/0e7e8185aa6e428f9635101f181973da/slide_12.jpg){kind=link}
{kind=link}
{kind=link}