Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[RSJ22] TDP-MAT: Multimodal Language Comprehens...
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 05, 2022
Technology
840
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[RSJ22] TDP-MAT: Multimodal Language Comprehension for Object Manipulation Tasks via Real Images
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 05, 2022
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
81
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
160
変更し続けられるシステムをどう保つか — AI時代のSSoTという設計原則
kawauso
1
1.1k
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
940
Multicaで30個のミニプロジェクトをAIエージェント運用して見えてきたこと
eiei114
1
630
AI時代におけるテストの基礎の再定義 / Rethinking the Fundamentals of Testing in the AI Era
mineo_matsuya
13
4.4k
データと地図で読む 大井町の「かわるもの、かわらないもの」
yoshiyama_hana
0
140
AI時代こそ、スケールしないことをしよう -「作る人」から「なぜ作るか」を考える人へ / Do Things That Don't Scale in the AI Era — From How to Why
kaminashi
1
100
『モデル + ハーネス』で読み解く AIエージェント入門
oracle4engineer
PRO
2
160
データエンジニアリングとドメイン駆動設計
masuda220
PRO
14
2.5k
複数プロダクトで進めるAI機能実装 ── 実践から得たリアルな学びとロードマップ実現への挑戦 / AICon2026_yanari
rakus_dev
1
270
なぜ、あなたのAPIは使われないのか? AX時代の設計原則、ガードレール、運用体制
yokawasa
1
210
Vポイント分析基盤におけるデータモデリング20年史
taromatsui_cccmkhd
4
720
Featured
See All Featured
AI: The stuff that nobody shows you
jnunemaker
PRO
9
840
The Invisible Side of Design
smashingmag
301
52k
A Soul's Torment
seathinner
6
3.1k
Marketing to machines
jonoalderson
1
5.6k
Faster Mobile Websites
deanohume
310
32k
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
Crafting Experiences
bethany
1
230
Between Models and Reality
mayunak
4
380
The browser strikes back
jonoalderson
0
1.4k
Refactoring Trust on Your Teams (GOTO; Chicago 2020)
rmw
35
3.7k
JAMstack: Web Apps at Ludicrous Speed - All Things Open 2022
reverentgeek
1
500
Improving Core Web Vitals using Speculation Rules API
sergeychernyshev
21
1.5k
Transcript
1
2
3 ✓ https://www.toyota.com/usa/toyota-effect/romy-robot
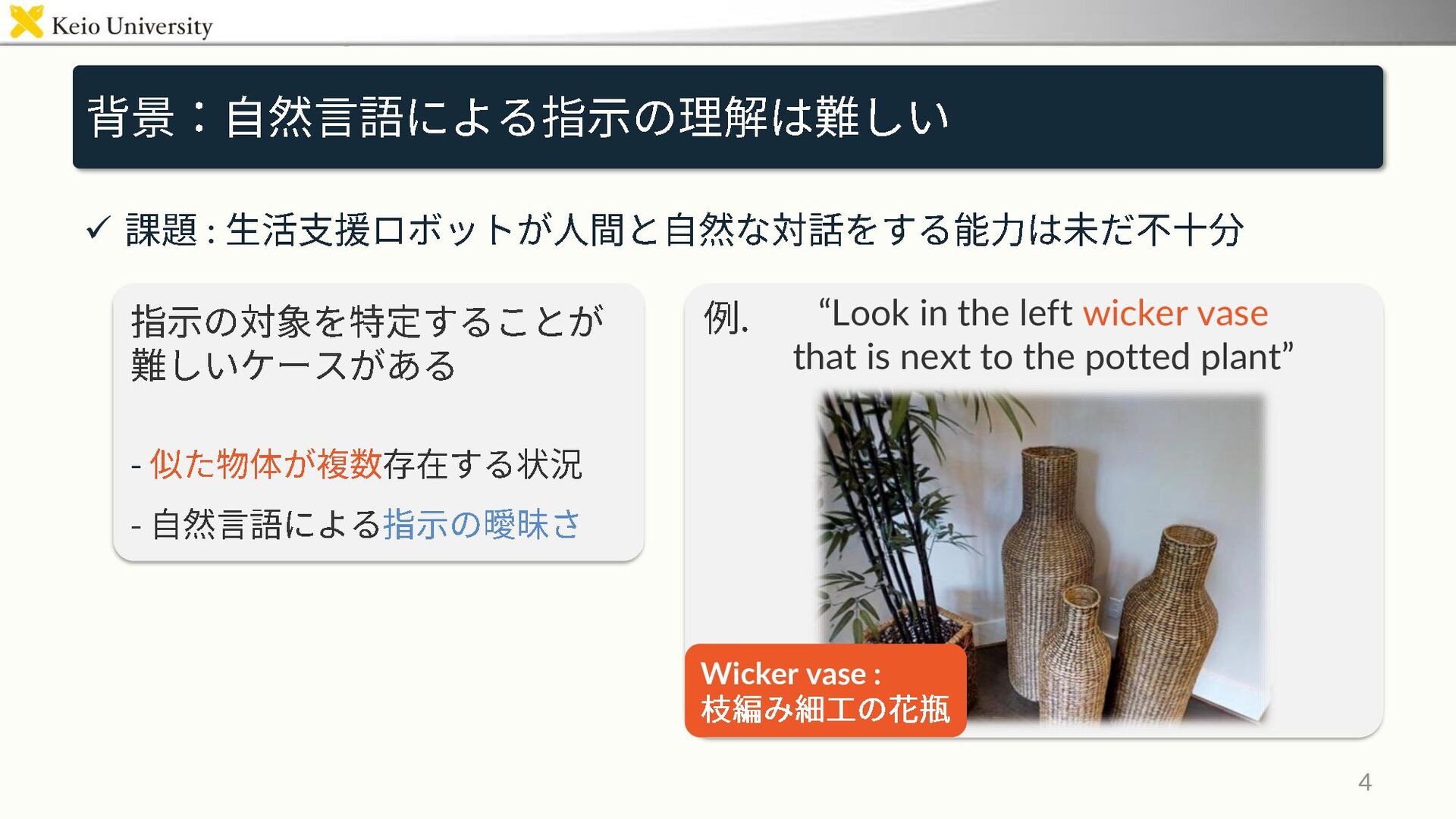
✓ : 4 “Look in the left wicker vase that
is next to the potted plant” Wicker vase :
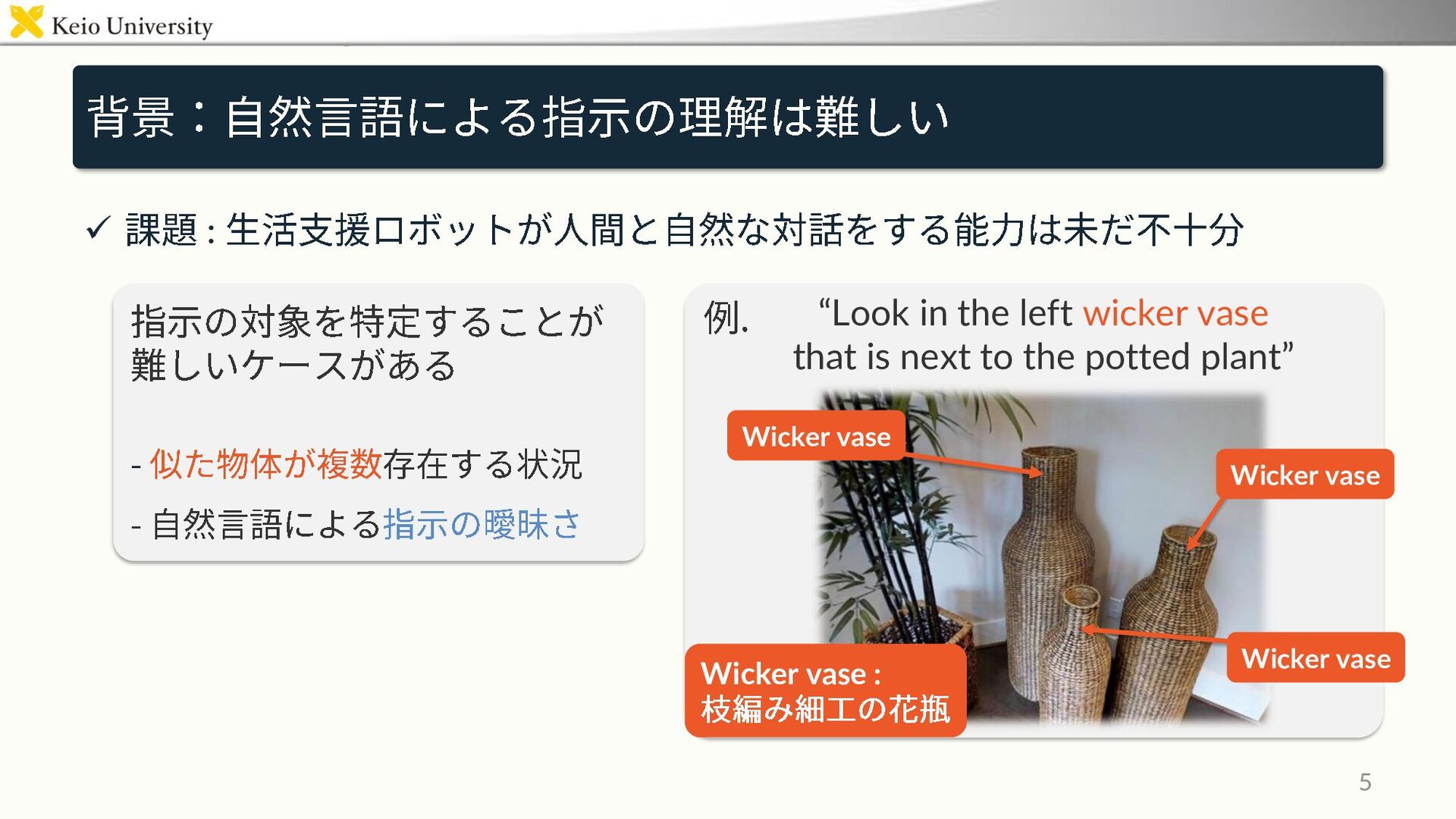
✓ : “Look in the left wicker vase that is
next to the potted plant” 5 Wicker vase : Wicker vase Wicker vase Wicker vase
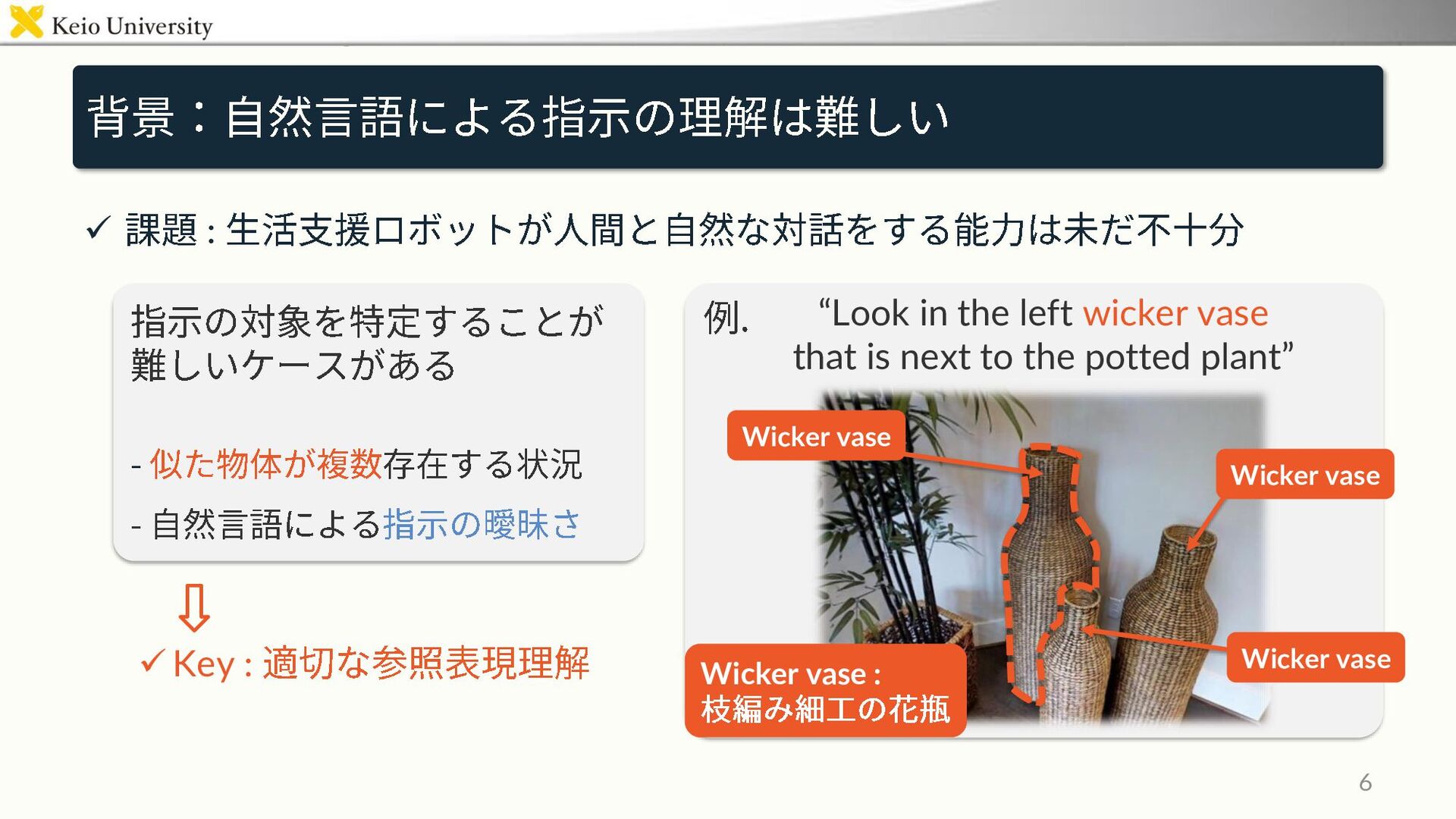
✓ : ✓ Key : “Look in the left wicker
vase that is next to the potted plant” 6 Wicker vase : Wicker vase Wicker vase Wicker vase
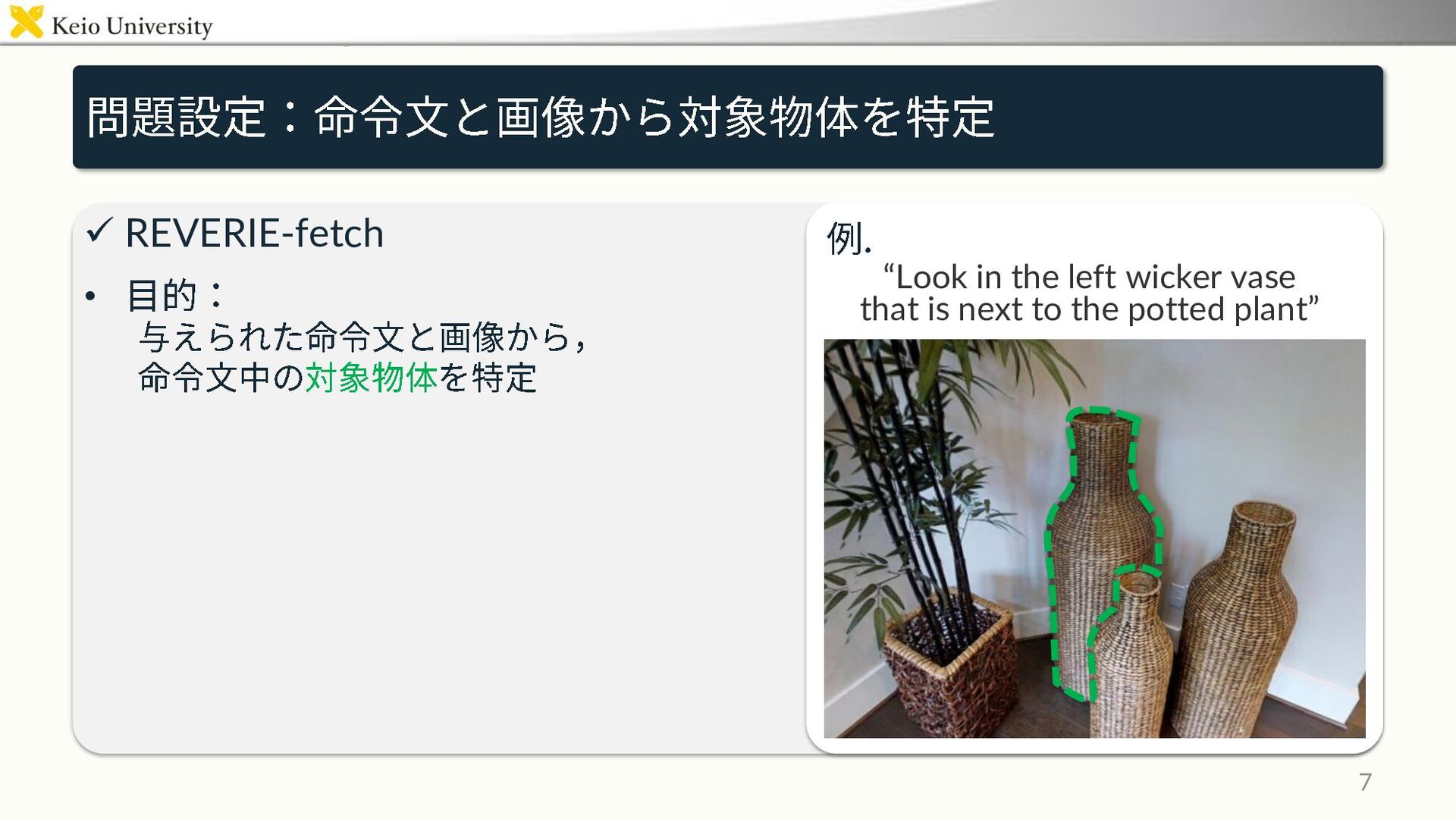
✓ REVERIE-fetch • 7 “Look in the left wicker vase
that is next to the potted plant”
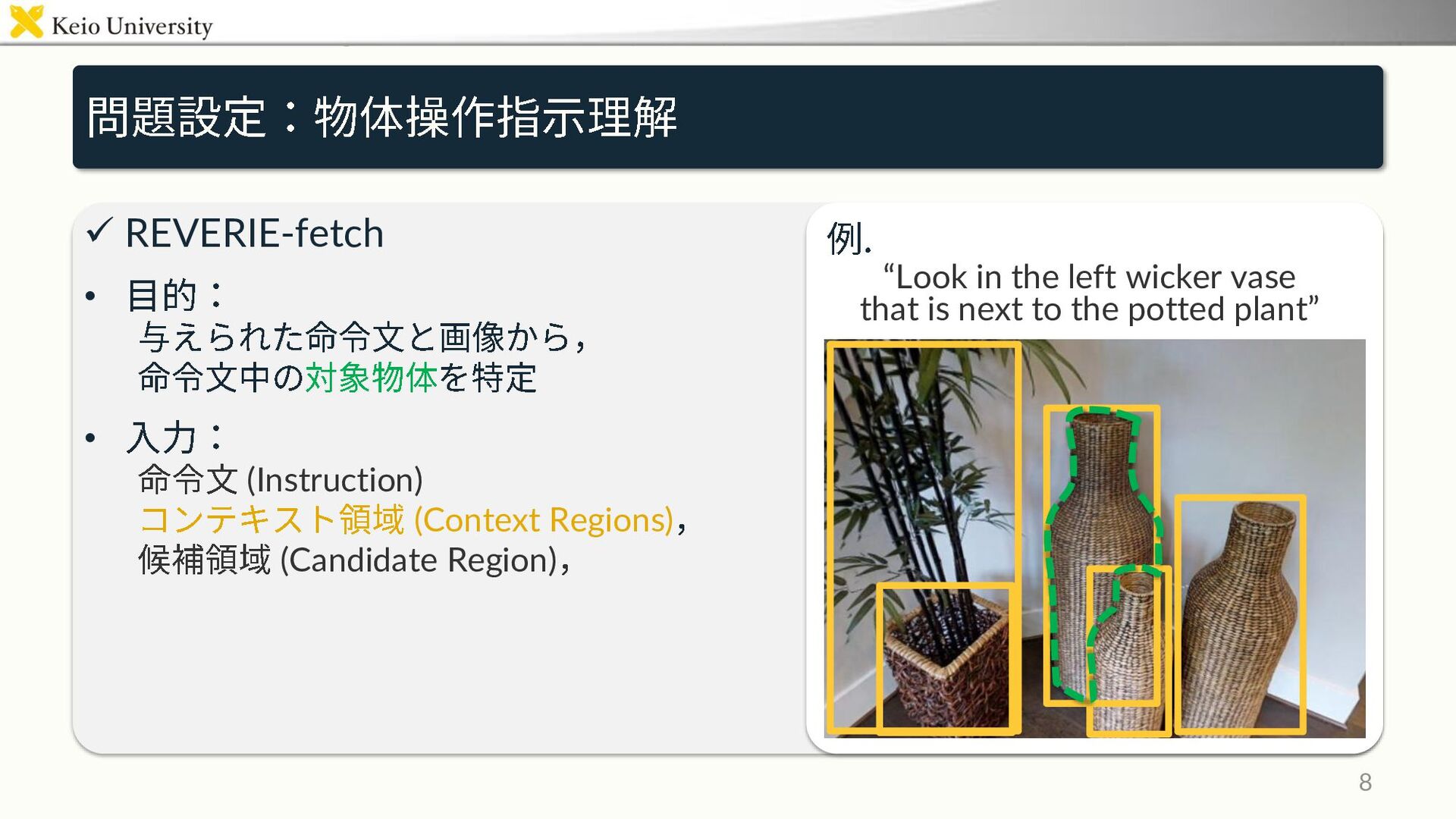
✓ REVERIE-fetch • • (Instruction) (Context Regions) (Candidate Region) 8
“Look in the left wicker vase that is next to the potted plant”
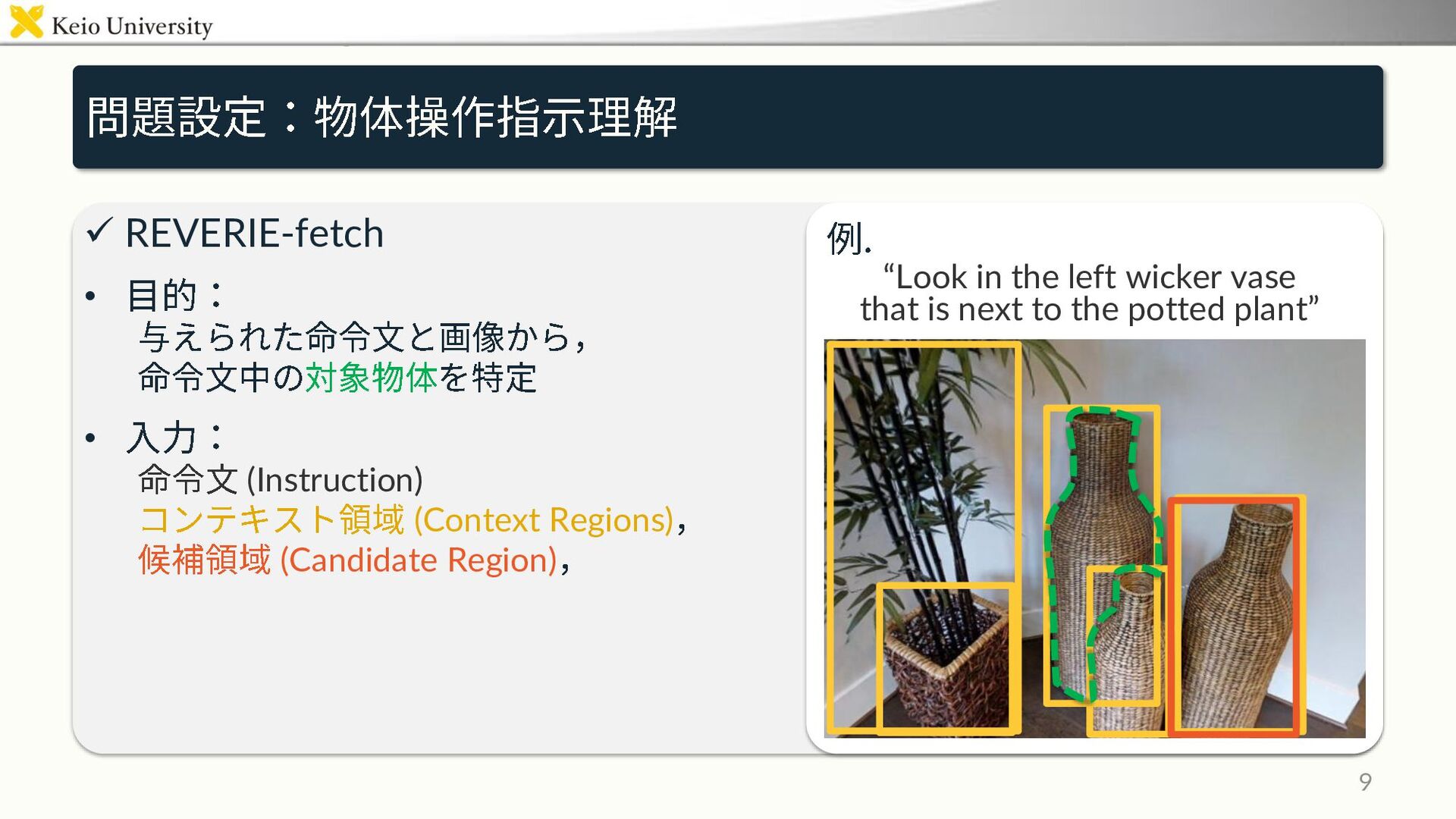
✓ REVERIE-fetch • • (Instruction) (Context Regions) (Candidate Region) 9
“Look in the left wicker vase that is next to the potted plant”
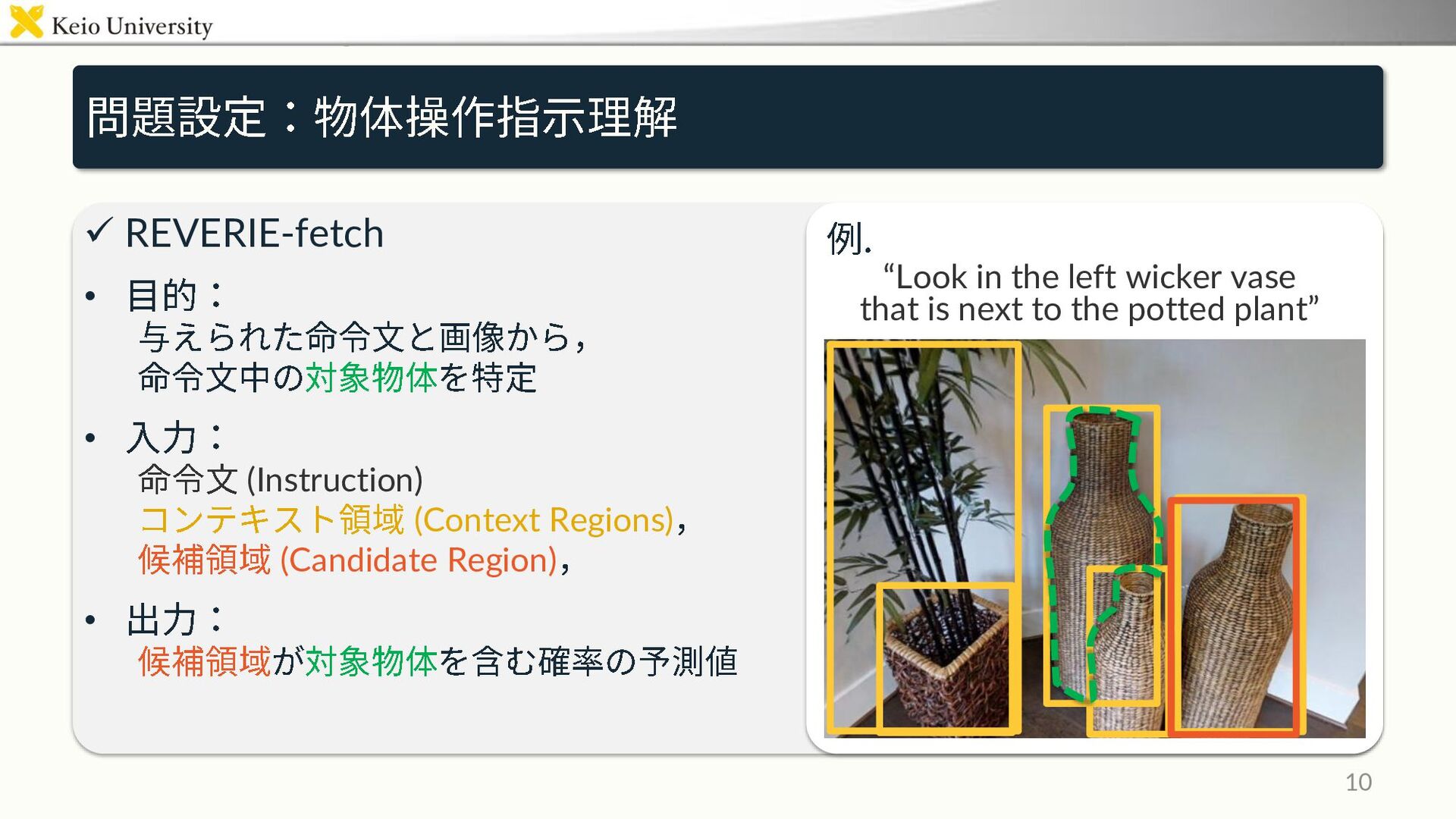
✓ REVERIE-fetch • • (Instruction) (Context Regions) (Candidate Region) •
10 “Look in the left wicker vase that is next to the potted plant”
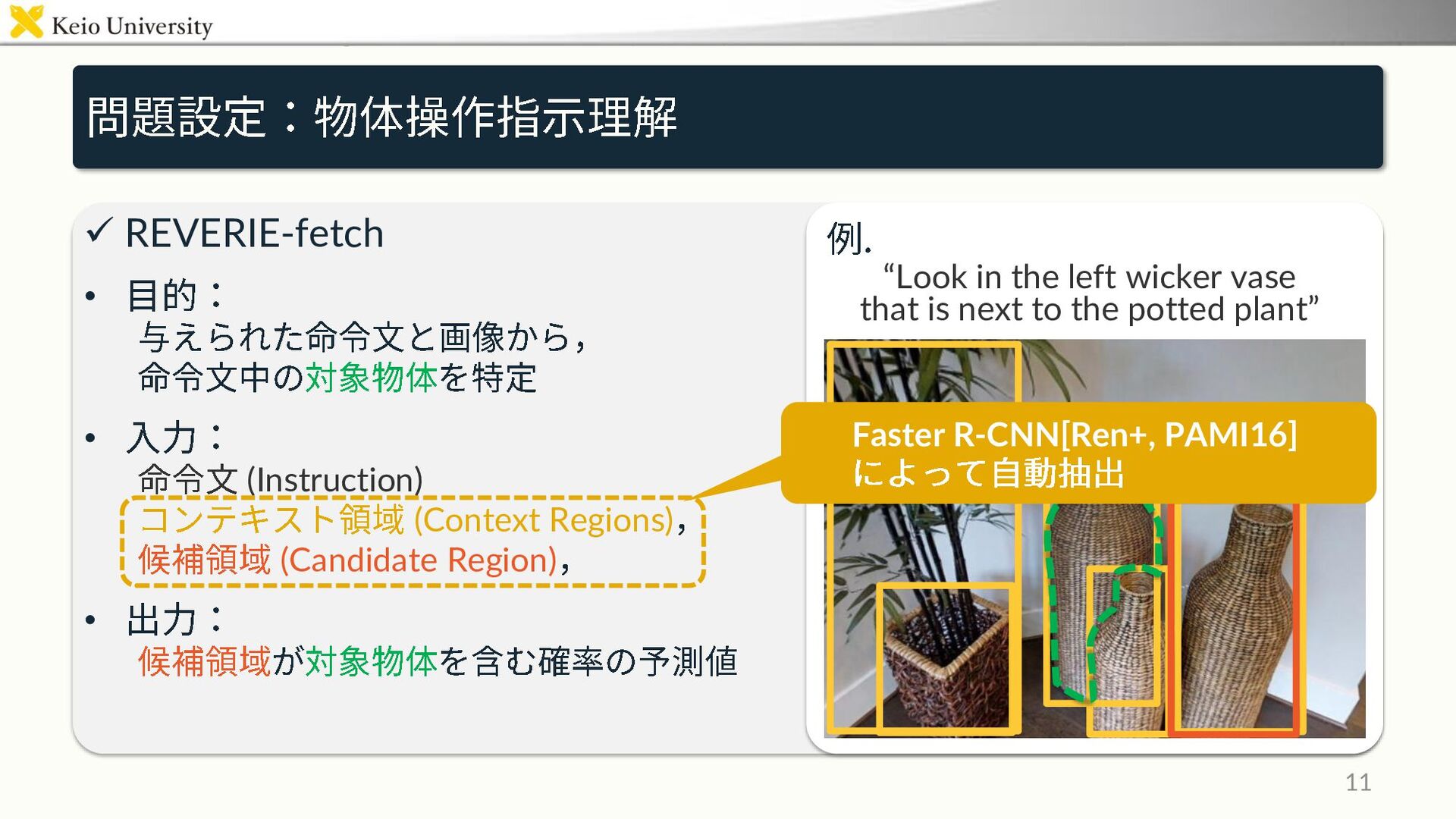
✓ REVERIE-fetch • • (Instruction) (Context Regions) (Candidate Region) •
11 “Look in the left wicker vase that is next to the potted plant” Faster R-CNN[Ren+, PAMI16]
MTCM [Magassouba+, RA-L19] . VGG16LSTM . Target-dependent UNITER (TDU) [Ishikawa+,
RA-L21] UNITER[Chen+, ECCV20] . REVERIE task / dataset [Qi+, CVPR20] , REVERIE 12
• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 13
• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 14
• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 15
• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 16
• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 17
2 1 3
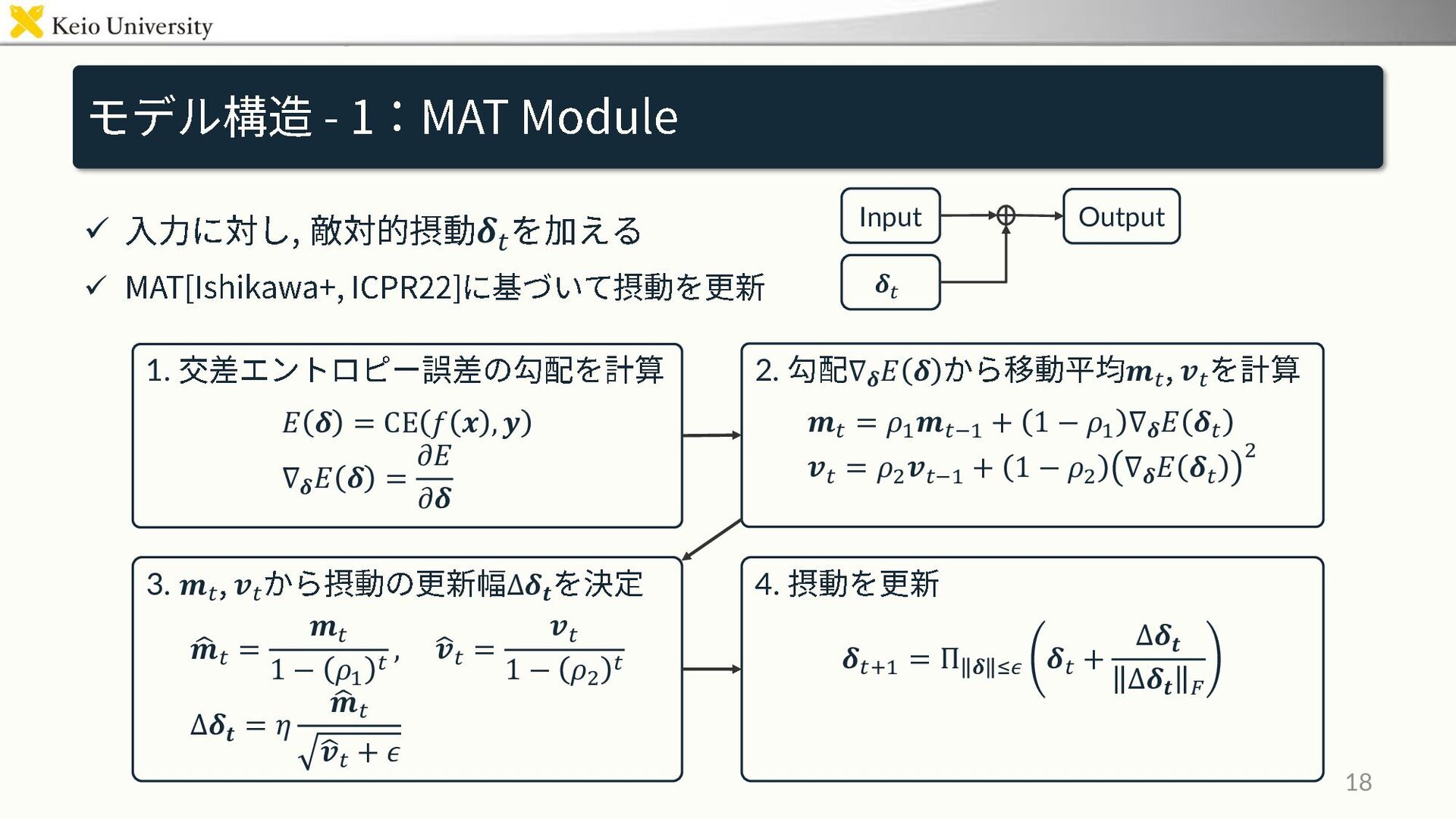
✓ 𝜹𝑡 ✓ 18 Input 𝜹𝑡 Output 1. 𝐸 𝜹
= CE 𝑓 𝒙 , 𝒚 ∇𝜹 𝐸 𝜹 = 𝜕𝐸 𝜕𝜹 2. ∇𝜹 𝐸 𝜹 𝒎𝑡 𝒗𝑡 𝒎𝑡 = 𝜌1 𝒎𝑡−1 + 1 − 𝜌1 ∇𝜹 𝐸 𝜹𝑡 𝒗𝑡 = 𝜌2 𝒗𝑡−1 + 1 − 𝜌2 ∇𝜹 𝐸 𝜹𝑡 2 3. 𝒎𝑡 𝒗𝑡 ∆𝜹𝒕 ෝ 𝒎𝑡 = 𝒎𝑡 1 − 𝜌1 𝑡 , ෝ 𝒗𝑡 = 𝒗𝑡 1 − 𝜌2 𝑡 ∆𝜹𝒕 = 𝜂 ෝ 𝒎𝑡 ෝ 𝒗𝑡 + 𝜖 4. 𝜹𝑡+1 = Π 𝜹 ≤𝜖 𝜹𝑡 + ∆𝜹𝒕 ∆𝜹𝒕 𝐹
✓ CLIP ✓ ViT[Dosovitskiy+, ICLR21] ✓ transformer [EOT] 19 [EOT]
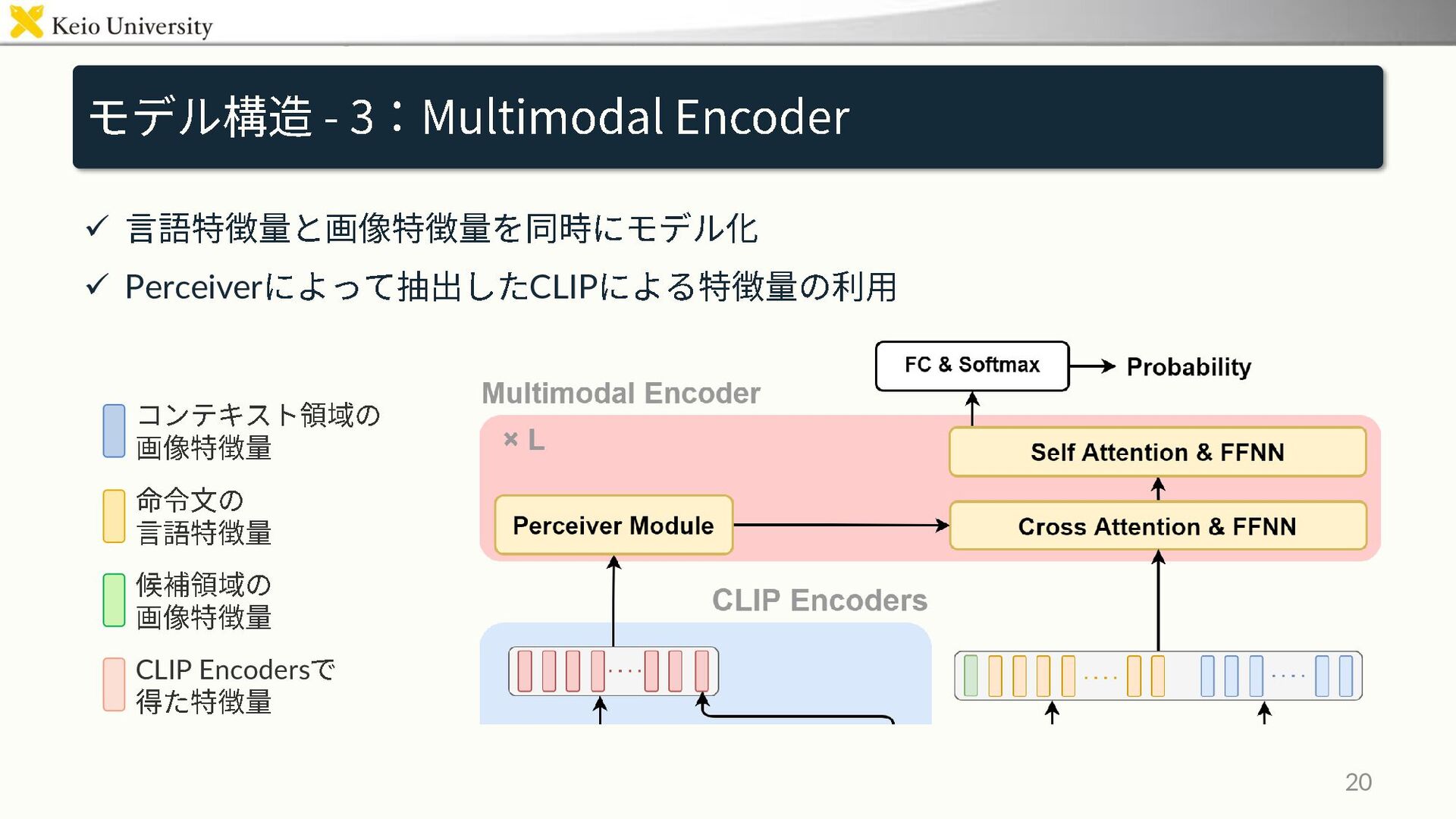
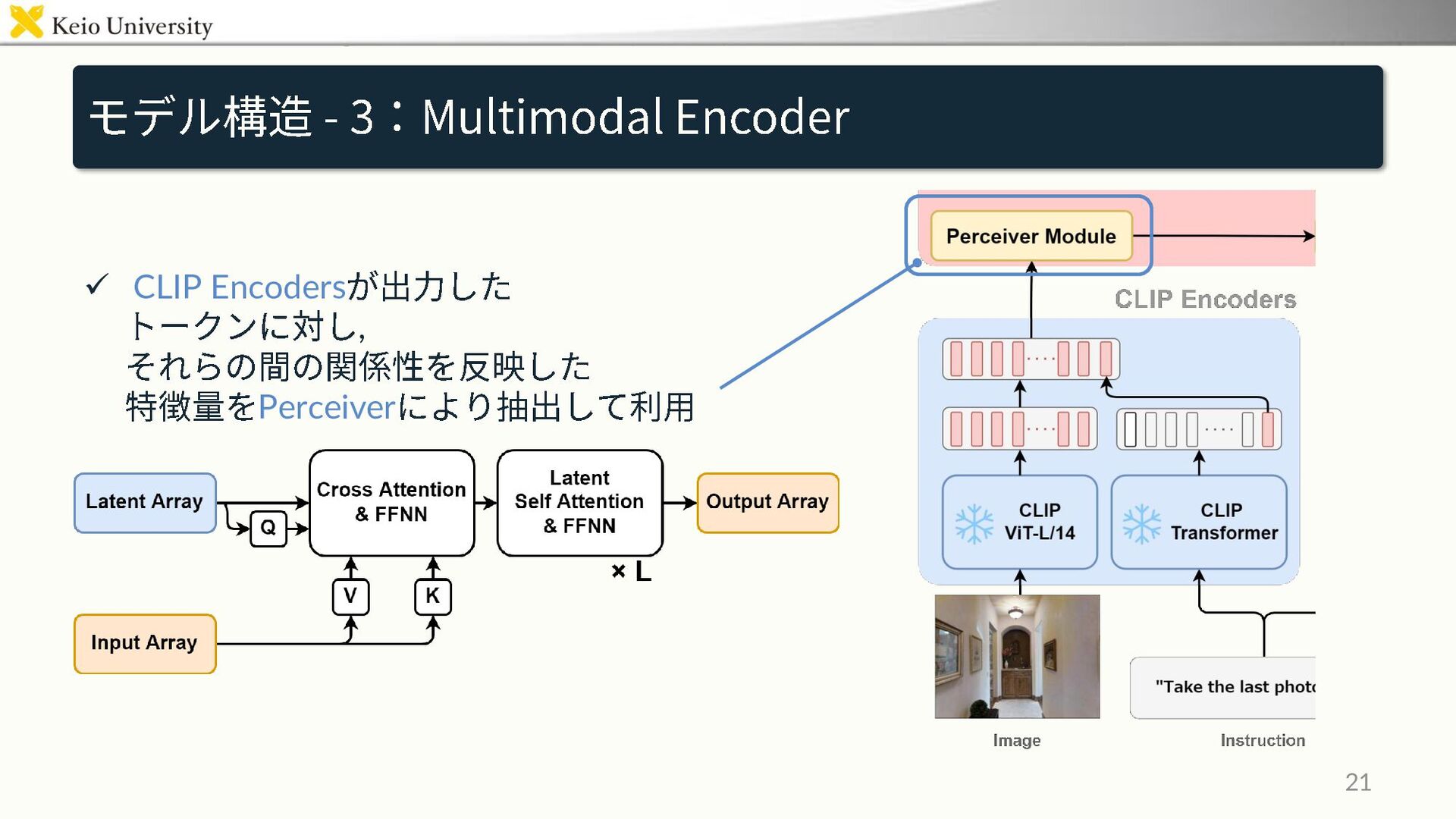
✓ ✓ Perceiver CLIP 20 CLIP Encoders
✓ CLIP Encoders , Perceiver 21
✓ REVERIE-fetch dataset - REVERIE dataset ✓ REVERIE[Qi+, CVPR18] -
→ 1. , 2. https://yuankaiqi.github.io/REVERIE_Challenge/static/img/demo.gif 22 Matterport3D
✓ REVERIE-fetch dataset - REVERIE dataset ✓ REVERIE[Qi+, CVPR18] :
+ 23 , ↓ - REVERIE - - https://yuankaiqi.github.io/REVERIE_Challenge/static/img/demo.gif
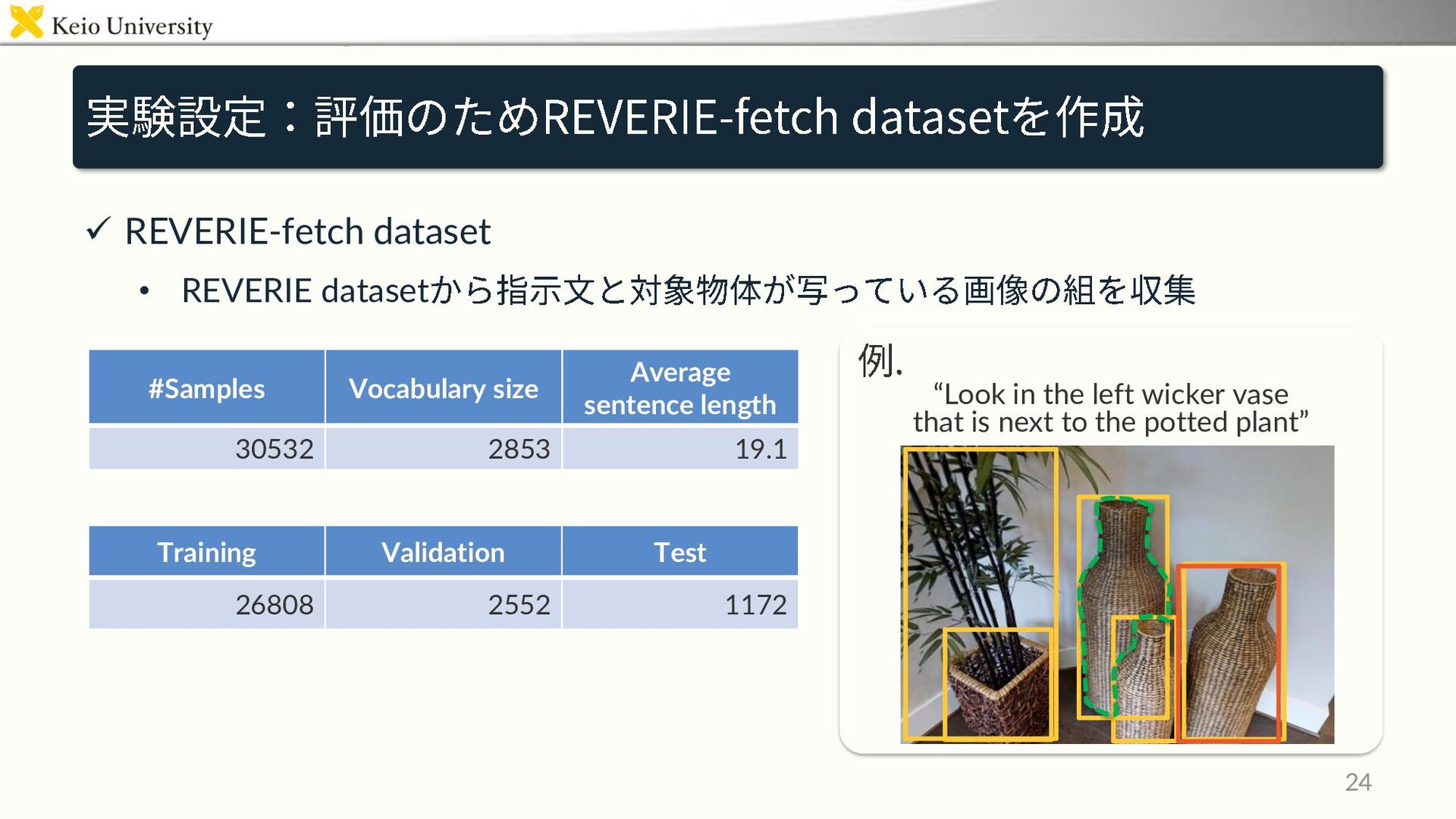
✓ REVERIE-fetch dataset • REVERIE dataset #Samples Vocabulary size Average
sentence length 30532 2853 19.1 Training Validation Test 26808 2552 1172 24 “Look in the left wicker vase that is next to the potted plant”
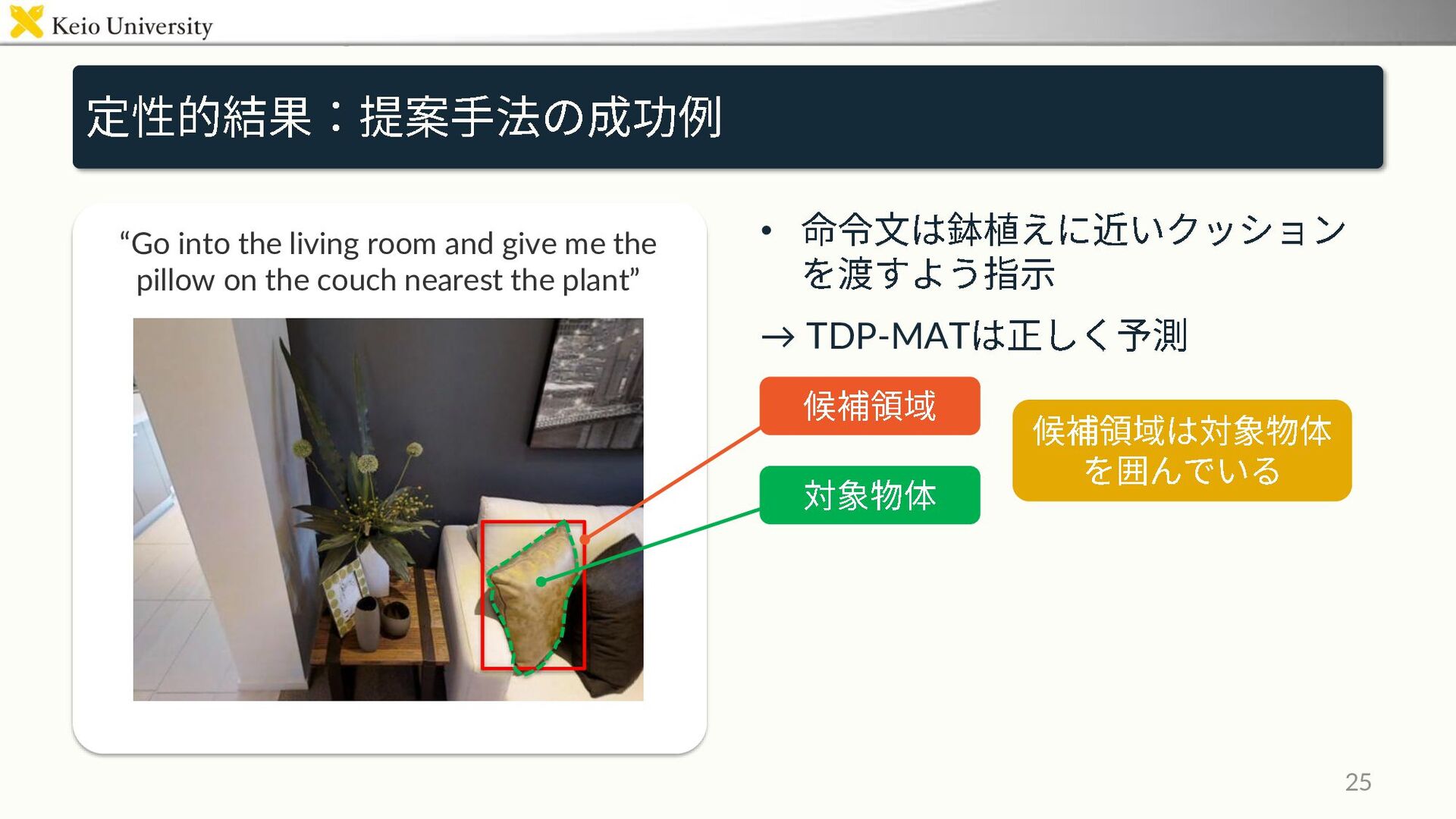
“Go into the living room and give me the pillow
on the couch nearest the plant” 25 • → TDP-MAT
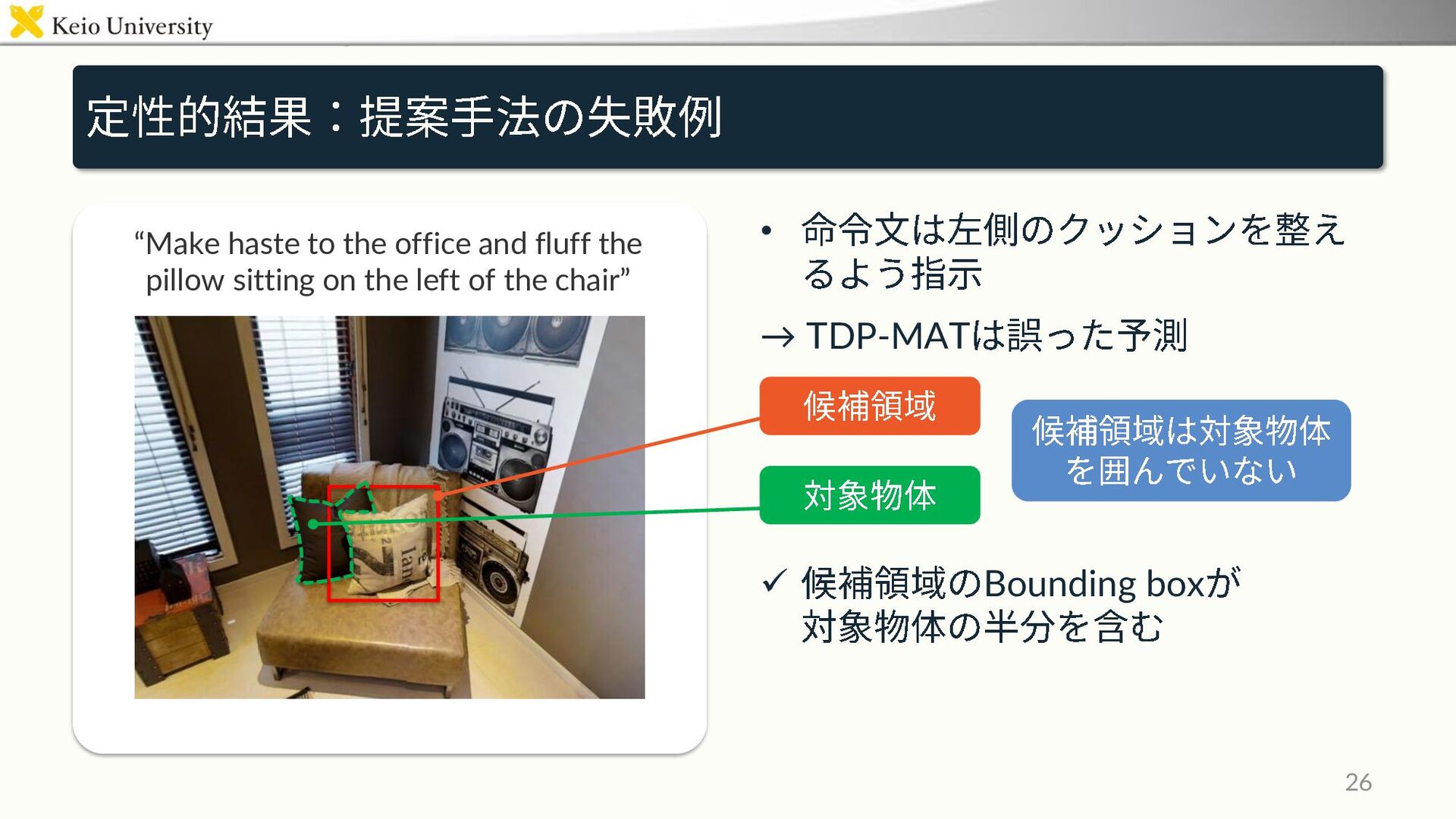
26 • → TDP-MAT ✓ Bounding box “Make haste to
the office and fluff the pillow sitting on the left of the chair”
• Acc [%] : 27 Condition Acc [%] ↑ Baseline
: TDU [Ishikawa+, IROS21] 73.3 0.485 Ours : TDP-MAT W/o MAT 72.5 3.55 W/o MAT + Smaller learning rate 74.4 0.831 W/o CLIP & Perceiver 74.1 1.47 W/o Pretraining 73.1 2.24 Full 75.3 0.691 +2.0
28 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]
73.3 0.485 Ours : TDP-MAT W/o MAT 72.5 3.55 W/o MAT + Smaller learning rate 74.4 0.831 W/o CLIP & Perceiver 74.1 1.47 W/o Pretraining 73.1 2.24 Full 75.3 0.691 +2.8 - - 5 - ( ) - Smaller learning rate : 1/8 -
29 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]
73.3 0.485 Ours : TDP-MAT W/o MAT 72.5 3.55 W/o MAT + Smaller learning rate 74.4 0.831 W/o CLIP & Perceiver 74.1 1.47 W/o Pretraining 73.1 2.24 Full 75.3 0.691 +1.2 - CLIP Encoders, Perceiver Module, - Cross Attention
30 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]
73.3 0.485 Ours : TDP-MAT W/o MAT 72.5 3.55 W/o MAT + Smaller learning rate 74.4 0.831 W/o CLIP & Perceiver 74.1 1.47 W/o Pretraining 73.1 2.24 Full 75.3 0.691 +2.2 - TDU
✓ • ✓ • MAT • ✓ • 31
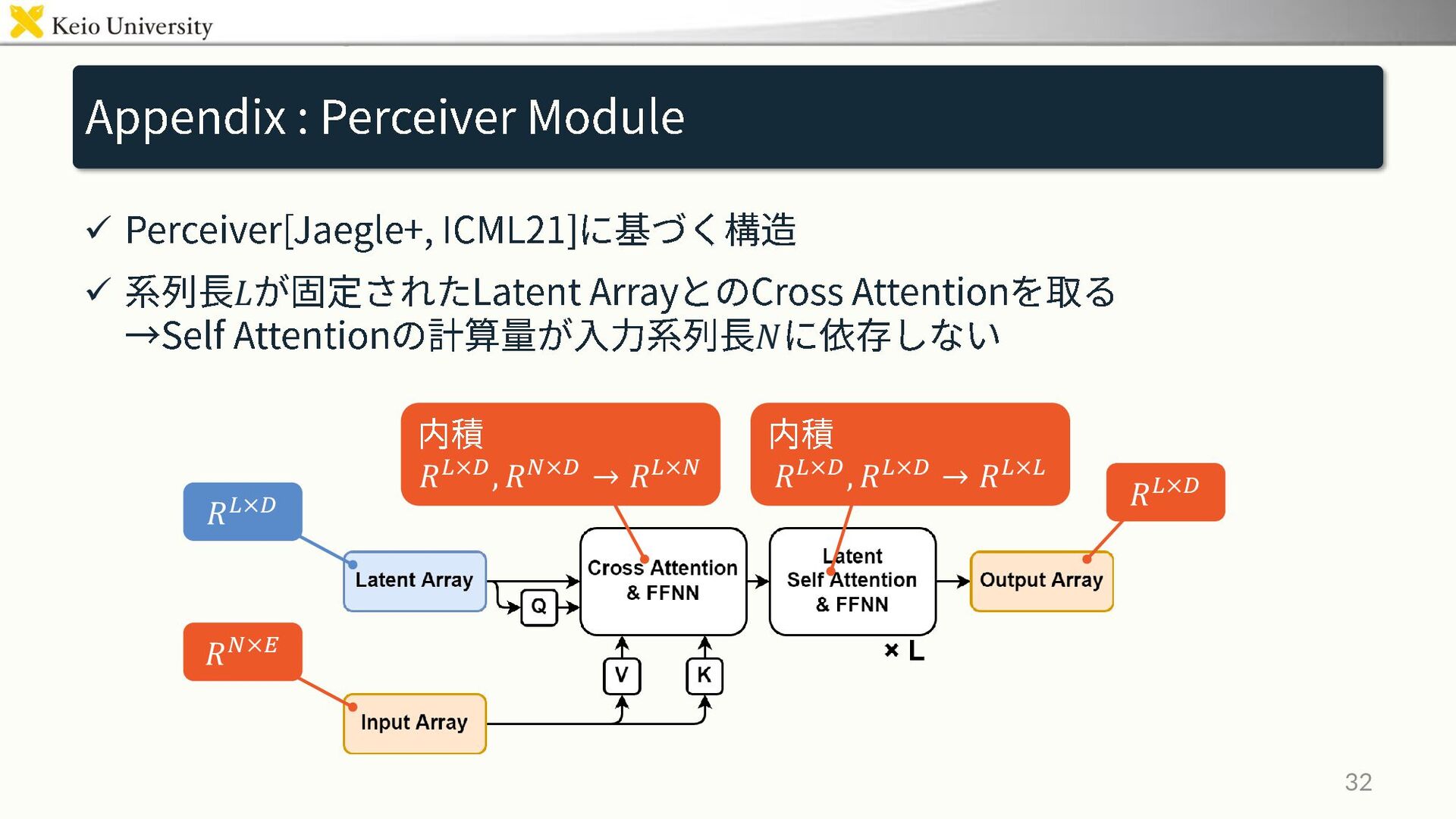
✓ ✓ 𝐿 𝑁 𝑅𝐿×𝐷 𝑅𝑁×𝐸 𝑅𝐿×𝐷, 𝑅𝑁×𝐷 → 𝑅𝐿×𝑁
𝑅𝐿×𝐷 𝑅𝐿×𝐷, 𝑅𝐿×𝐷 → 𝑅𝐿×𝐿 32
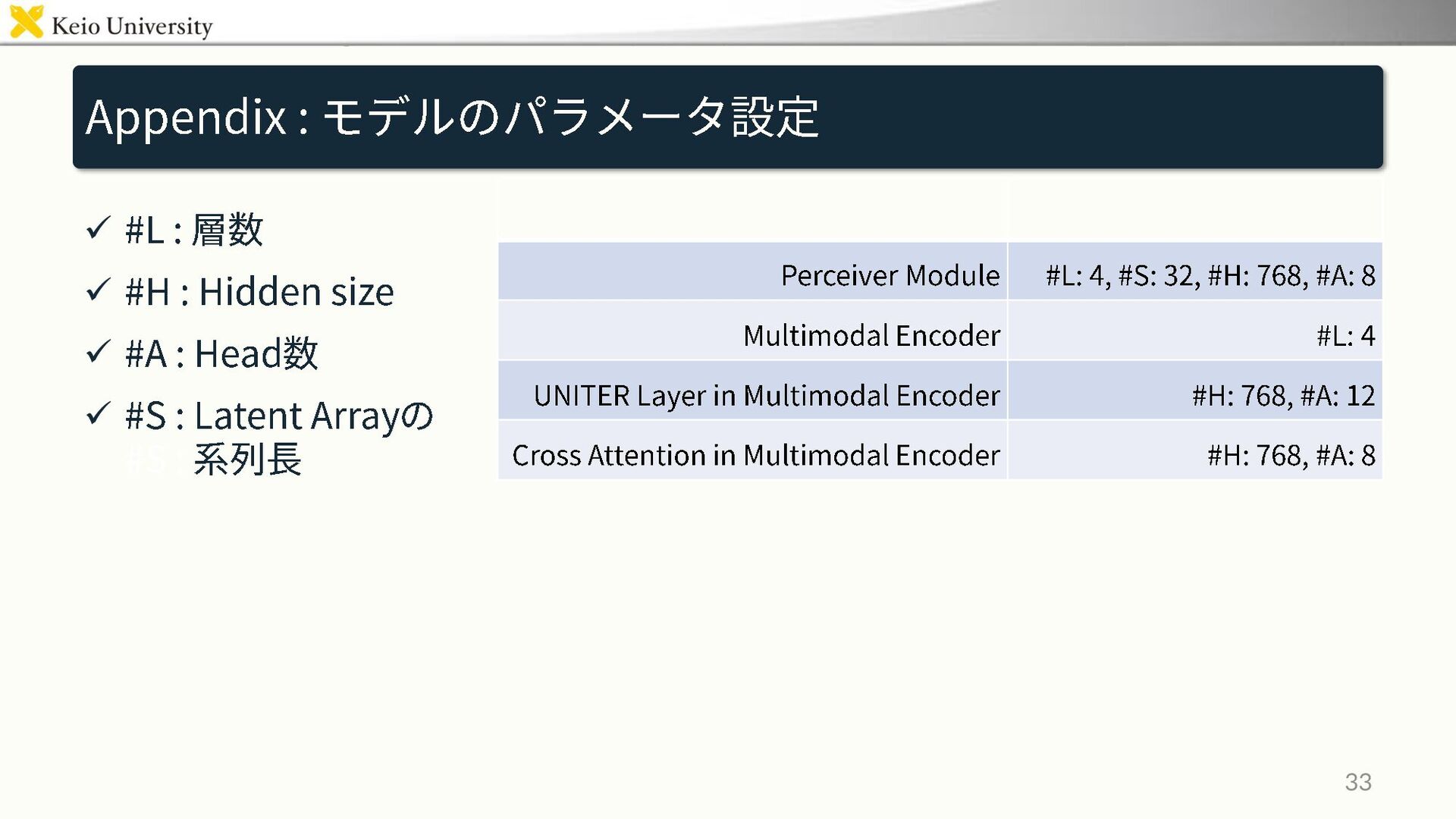
✓ ✓ ✓ ✓ 33
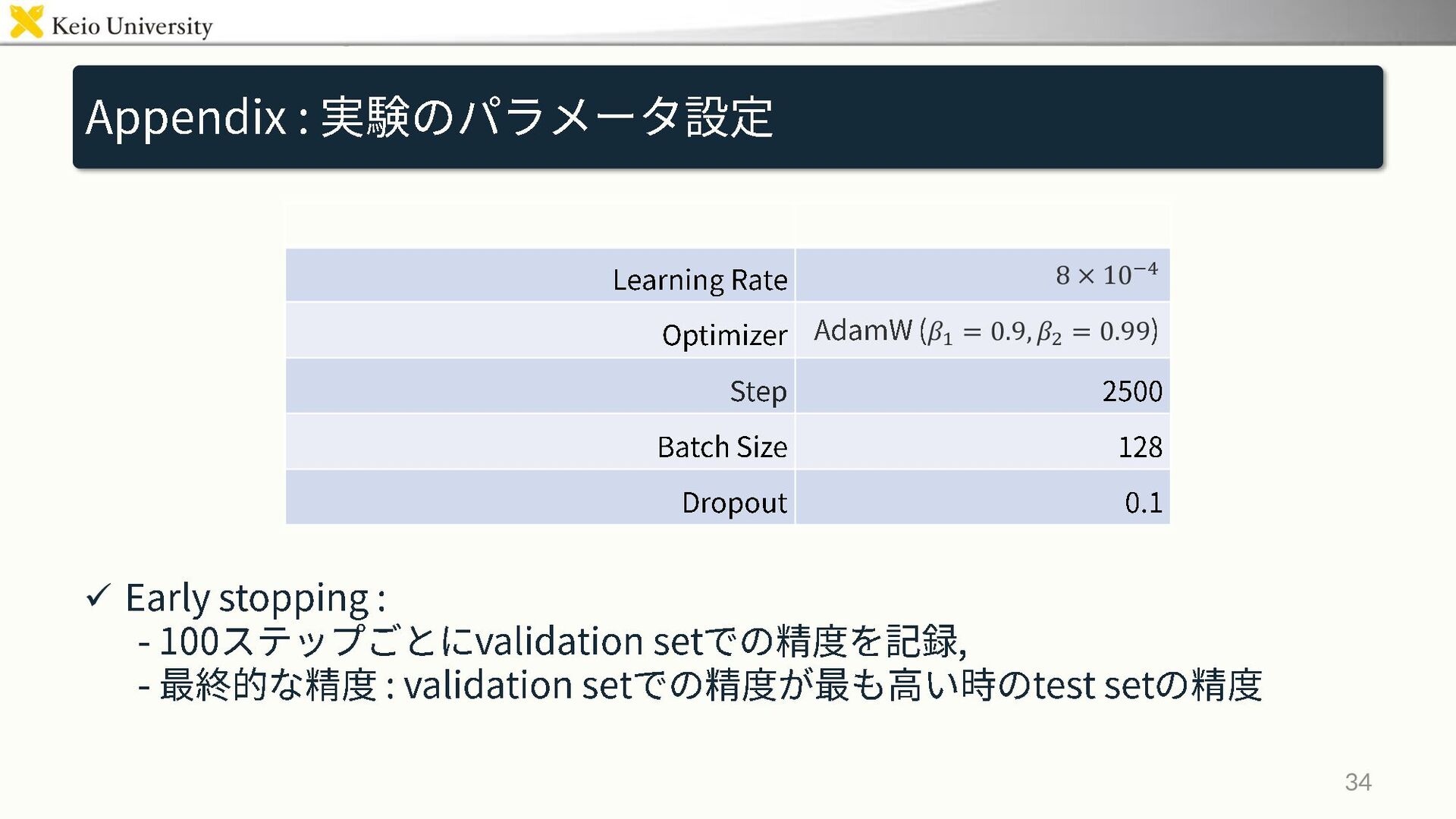
✓ 34 8 × 10−4 𝛽1 = 0.9, 𝛽2 =
0.99
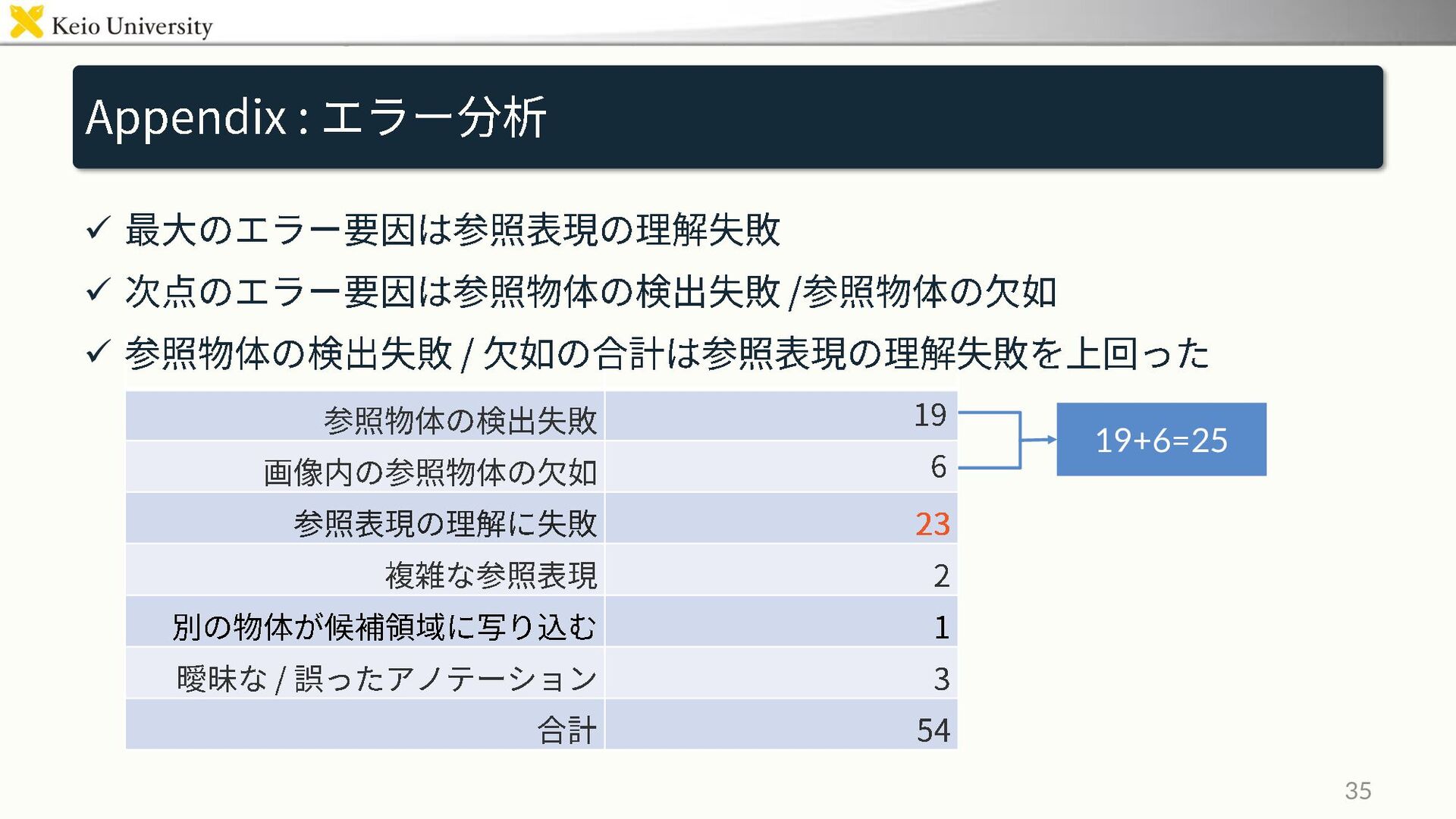
✓ ✓ ✓ 35 19+6=25
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![MTCM [Magassouba+, RA-L19] . VGG16LSTM . Target-dependent UNITER (TDU) [Ishikawa+,](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_11.jpg){kind=link}
![• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 13](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_12.jpg){kind=link}
![• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 14](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_13.jpg){kind=link}
![• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 15](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_14.jpg){kind=link}
![• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 16](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_15.jpg){kind=link}
![• MAT[Ishikawa+, ICPR22] • CLIP[Radford+, ICML21] • Perceiver[Jaegle+, ICML21] 17](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_16.jpg){kind=link}
{kind=link}
![✓ CLIP ✓ ViT[Dosovitskiy+, ICLR21] ✓ transformer [EOT] 19 [EOT]](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_18.jpg){kind=link}
{kind=link}
{kind=link}
![✓ REVERIE-fetch dataset - REVERIE dataset ✓ REVERIE[Qi+, CVPR18] -](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_21.jpg){kind=link}
![✓ REVERIE-fetch dataset - REVERIE dataset ✓ REVERIE[Qi+, CVPR18] :](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![• Acc [%] : 27 Condition Acc [%] ↑ Baseline](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_26.jpg){kind=link}
![28 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_27.jpg){kind=link}
![29 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_28.jpg){kind=link}
![30 Condition Acc [%] ↑ Baseline : TDU [Ishikawa+, IROS21]](https://files.speakerdeck.com/presentations/70feb24871cd413292472a3ba9241852/slide_29.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}