Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[RSJ23] ENCHANT: Enhanced Nearest-neighbor Capt...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 10, 2023
Technology
350
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[RSJ23] ENCHANT: Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 10, 2023
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
81
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
AIとハーネスで育てるトランスコンパイラ / 20260722 Yasushi Katayama
shift_evolve
PRO
3
770
AIツールを導入しても生産性はあがらない? カオナビが直面した 3つの壁と乗り越え方。/ Overcoming 3 Barriers to AI-Driven Productivity at kaonavi
kaonavi
0
160
現場との対話から始める “作る前に問い直す”業務改善
mochico50
1
220
Playwright × AI Agent でE2Eテストはどう変わるか AI駆動テストの可能性と実用検証の結果
taiga7543
2
790
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
4
2.5k
複数プロダクトで進めるAI機能実装 ── 実践から得たリアルな学びとロードマップ実現への挑戦 / AICon2026_yanari
rakus_dev
1
270
JAWS_ICEBERG_BASECAMP
iqbocchi
2
110
全社でのソフトウェアサプライチェーン攻撃対策をやってみた with Takumi Guard
z63d
0
270
OpenTelemetryにおけるGoのゼロコード・コンパイル時計装について #fukuokago
quiver
0
200
Amazon Quick 入門!
ysuzuki
2
130
それでも、技術なブログを書く理由 #kichijojipm / Why I Still Write Tech Blogs Even Now
shinkufencer
0
340
AIエージェントがあれば技術書なんてすぐ書けるでしょ→無理でした
watany
2
220
Featured
See All Featured
Mozcon NYC 2025: Stop Losing SEO Traffic
samtorres
1
410
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
56k
Visualization
eitanlees
152
17k
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
380
HTML-Aware ERB: The Path to Reactive Rendering @ RubyCon 2026, Rimini, Italy
marcoroth
3
360
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
Avoiding the “Bad Training, Faster” Trap in the Age of AI
tmiket
0
200
Evolution of real-time – Irina Nazarova, EuRuKo, 2024
irinanazarova
9
1.4k
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
57k
Reality Check: Gamification 10 Years Later
codingconduct
0
2.2k
Building Experiences: Design Systems, User Experience, and Full Site Editing
marktimemedia
0
560
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
190
Transcript
平野慎之助1, 小松拓実,1 和田唯我1, 神原元就1, 畑中駿平1, 平川翼2, 山下隆義2, 藤吉弘亘2杉浦孔明1 1慶應義塾大学, 2中部大学
ENCHANT: 大規模言語モデルを用いた仮説生成に基づく クロスモーダル説明文生成
背景: 生活支援ロボットには安全性が求められる ▪ 生活支援ロボット ▪ 要介助者支援の解決策として注目 ▪ 基本動作の一つに物体配置 ▪ タスク実行前に危険性を予測し、ユーザに
判断を仰ぐ機能は安全性を高める 例)バイキンマンのぬいぐるみを置く際にピンクの 鳥のぬいぐるみに衝突するリスクがあります 2 2x
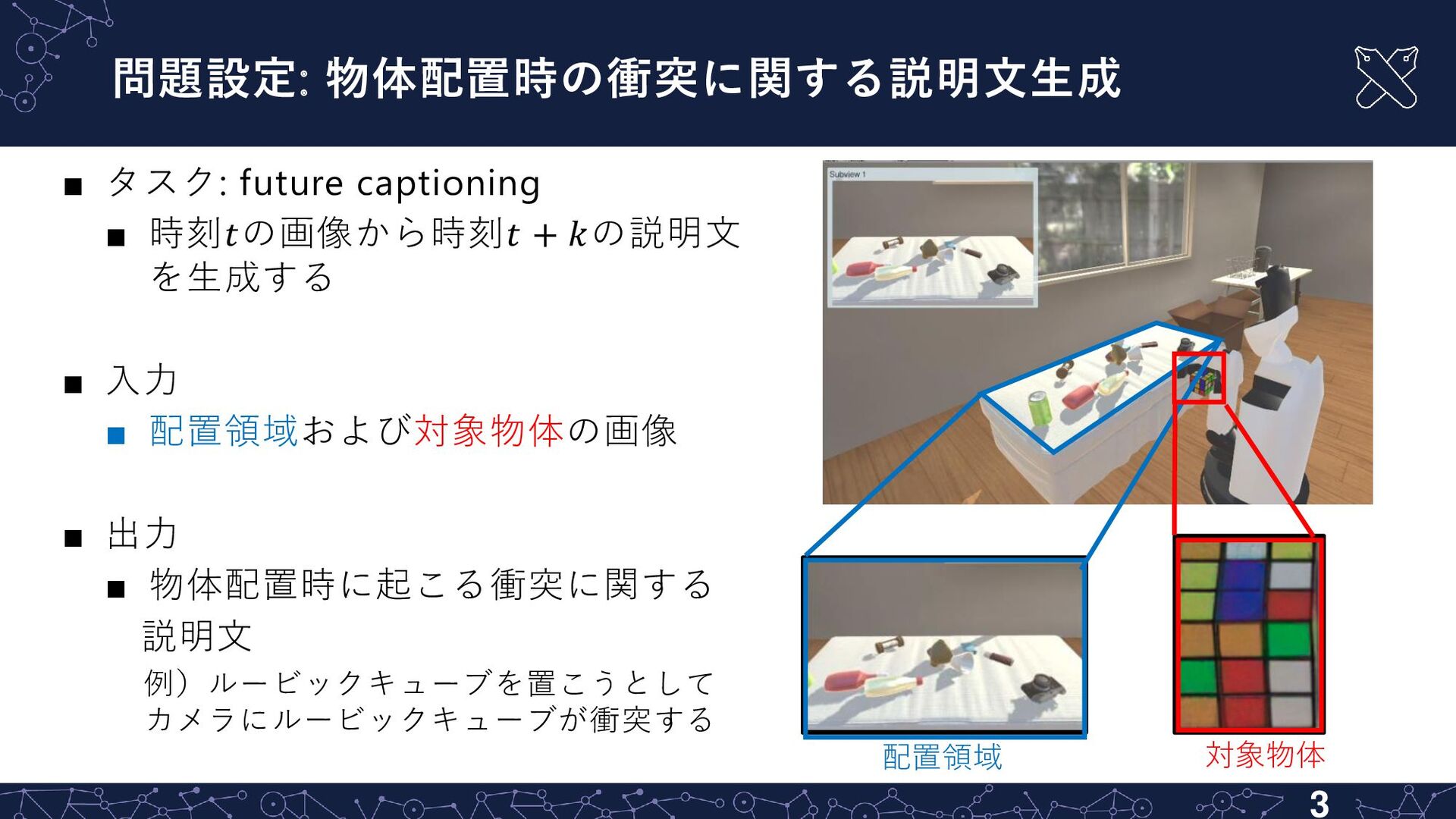
問題設定: 物体配置時の衝突に関する説明文生成 3 ▪ タスク: future captioning ▪ 時刻𝑡の画像から時刻𝑡 +
𝑘の説明文 を生成する ▪ 入力 ▪ 配置領域および対象物体の画像 ▪ 出力 ▪ 物体配置時に起こる衝突に関する 説明文 例)ルービックキューブを置こうとして カメラにルービックキューブが衝突する 配置領域 対象物体
関連研究: 事前に衝突を予測し説明することは困難 4 手法名 内容 CLEVRER [Yi+, ICLR20] 物体同士の衝突に関するデータセットを構築 多様な形状の物体に対応していない
Where2Act [Guibas+, ICCV21] 多関節物体の相互作用に焦点を当て、物体操作の 成功確率を予測 NNFC [小松+, JSAI23] NNLM [Urvashi+, ICLR21] を導入し、衝突に関する future captioningタスクに取り組んだ手法 CLEVRER Where2Act NNFC
Nearest Neighbor Future Captioning (NNFC) 5 入力 NNLM [Uravashi+, ICLR21]
をマルチモーダル言語生成に導入 配置領域の特徴量抽出が不適切であり、生成文の品質が不十分
Nearest Neighbor Future Captioning (NNFC) 6 入力 NNLM [Uravashi+, ICLR21]
をマルチモーダル言語生成に導入 配置領域の特徴量抽出が不適切であり、生成文の品質が不十分 タスク実行前の 画像を入力
Nearest Neighbor Future Captioning (NNFC) 7 NNLM [Uravashi+, ICLR21] をマルチモーダル言語生成に導入
配置領域の特徴量抽出が不適切であり、生成文の品質が不十分 NNLMに基づき、 𝑘近傍法を用いて 出力をrescore
Nearest Neighbor Future Captioning (NNFC) 8 NNLM [Uravashi+, ICLR21] をマルチモーダル言語生成に導入
配置領域の特徴量抽出が不適切であり、生成文の品質が不十分
提案手法: Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation (ENCHANT) ▪ Nearest
Neighbor Augmentation Module ▪ 大規模言語モデルによる生成文を用いてデータ拡張を行う ▪ Parallel Cross Attentional Decoder ▪ 画像および言語の特徴抽出を対称的に行う ▪ Segment Feature Extractor ▪ Attention mapとセグメンテーションモデルを用いて 特徴量を抽出 9
提案手法: Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation (ENCHANT) ▪ Nearest
Neighbor Augmentation Module ▪ 大規模言語モデルによる生成文を用いてデータ拡張を行う ▪ Parallel Cross Attentional Decoder ▪ 画像および言語の特徴抽出を対称的に行う ▪ Segment Feature Extractor ▪ Attention mapとセグメンテーションモデルを用いて 特徴量を抽出 10
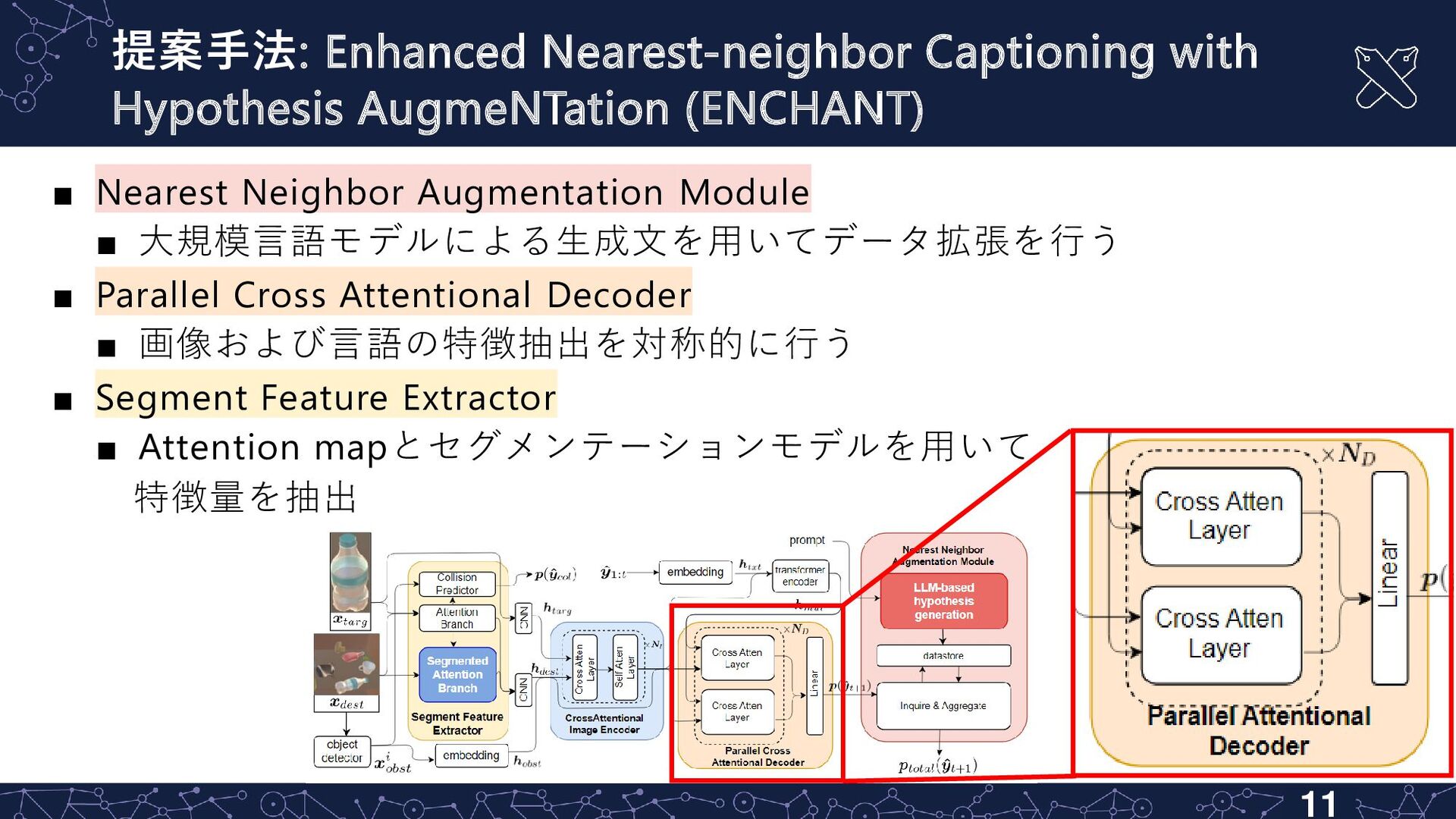
提案手法: Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation (ENCHANT) ▪ Nearest
Neighbor Augmentation Module ▪ 大規模言語モデルによる生成文を用いてデータ拡張を行う ▪ Parallel Cross Attentional Decoder ▪ 画像および言語の特徴抽出を対称的に行う ▪ Segment Feature Extractor ▪ Attention mapとセグメンテーションモデルを用いて 特徴量を抽出 11
提案手法: Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation (ENCHANT) ▪ Nearest
Neighbor Augmentation Module ▪ 大規模言語モデルによる生成文を用いてデータ拡張を行う ▪ Parallel Cross Attentional Decoder ▪ 画像および言語の特徴抽出を対称的に行う ▪ Segment Feature Extractor ▪ Attention mapとセグメンテーションモデルを用いて 特徴量を抽出 12
Segment Feature Extractor: attention map とセグメンテーション画像を重畳 13 配置領域 衝突に関する attention
map SAM [Kirillov+] によるセグメンテーション画像 Segment Feature Extractorの出力
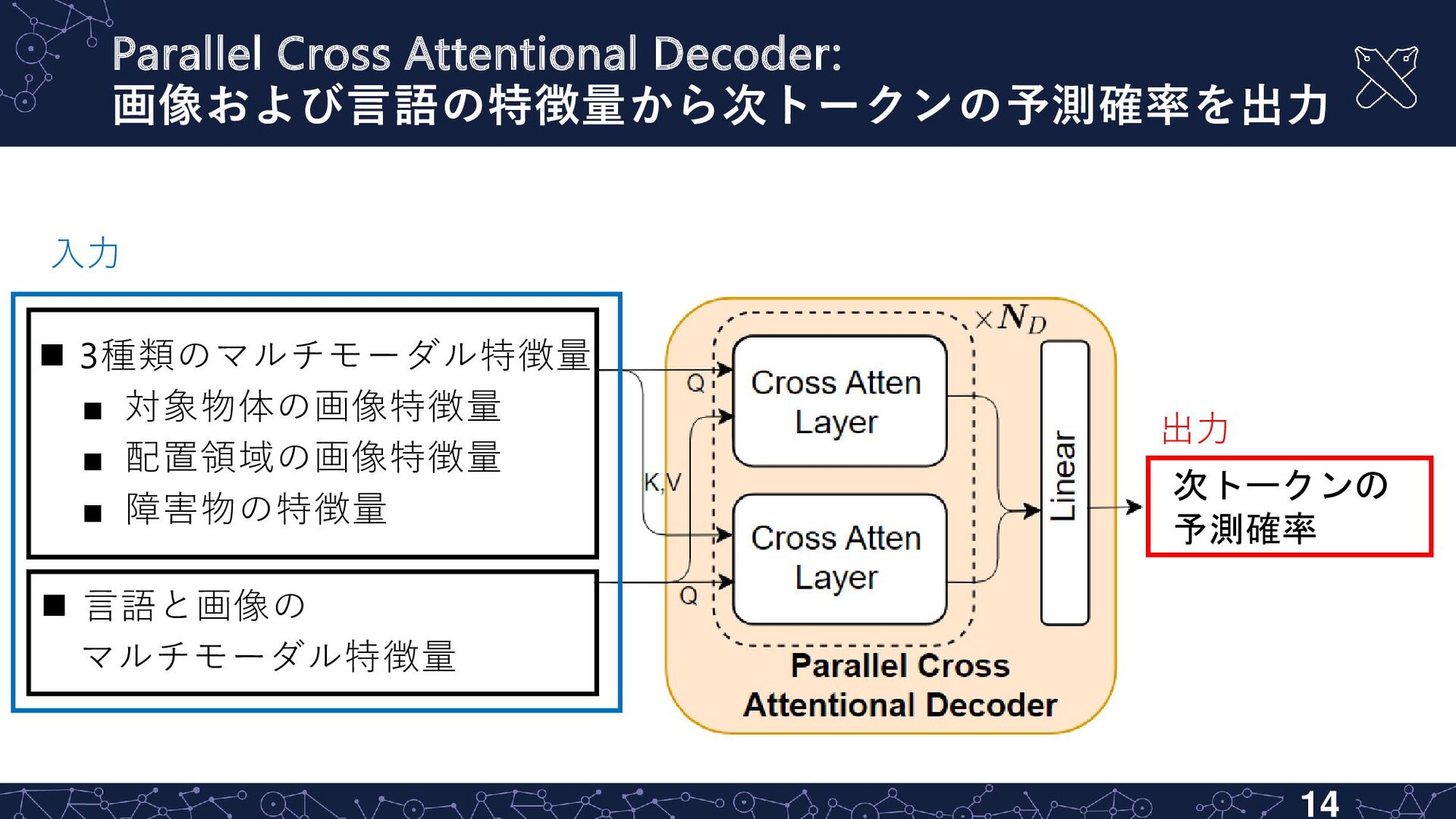
Parallel Cross Attentional Decoder: 画像および言語の特徴量から次トークンの予測確率を出力 次トークンの 予測確率 出力 ◼ 3種類のマルチモーダル特徴量
▪ 対象物体の画像特徴量 ▪ 配置領域の画像特徴量 ▪ 障害物の特徴量 ◼ 言語と画像の マルチモーダル特徴量 入力 14
Parallel Cross Attentional Decoder: 画像および言語の特徴量から次トークンの予測確率を出力 15 次トークンの 予測確率 出力 ◼
画像特徴量および言語特徴量を対称的に抽出 ◼ Cross Attention 構造を使用して予測 ◼ 3種類のマルチモーダル特徴量 ▪ 対象物体の画像特徴量 ▪ 配置領域の画像特徴量 ▪ 障害物の特徴量 ◼ 言語と画像の マルチモーダル特徴量 入力
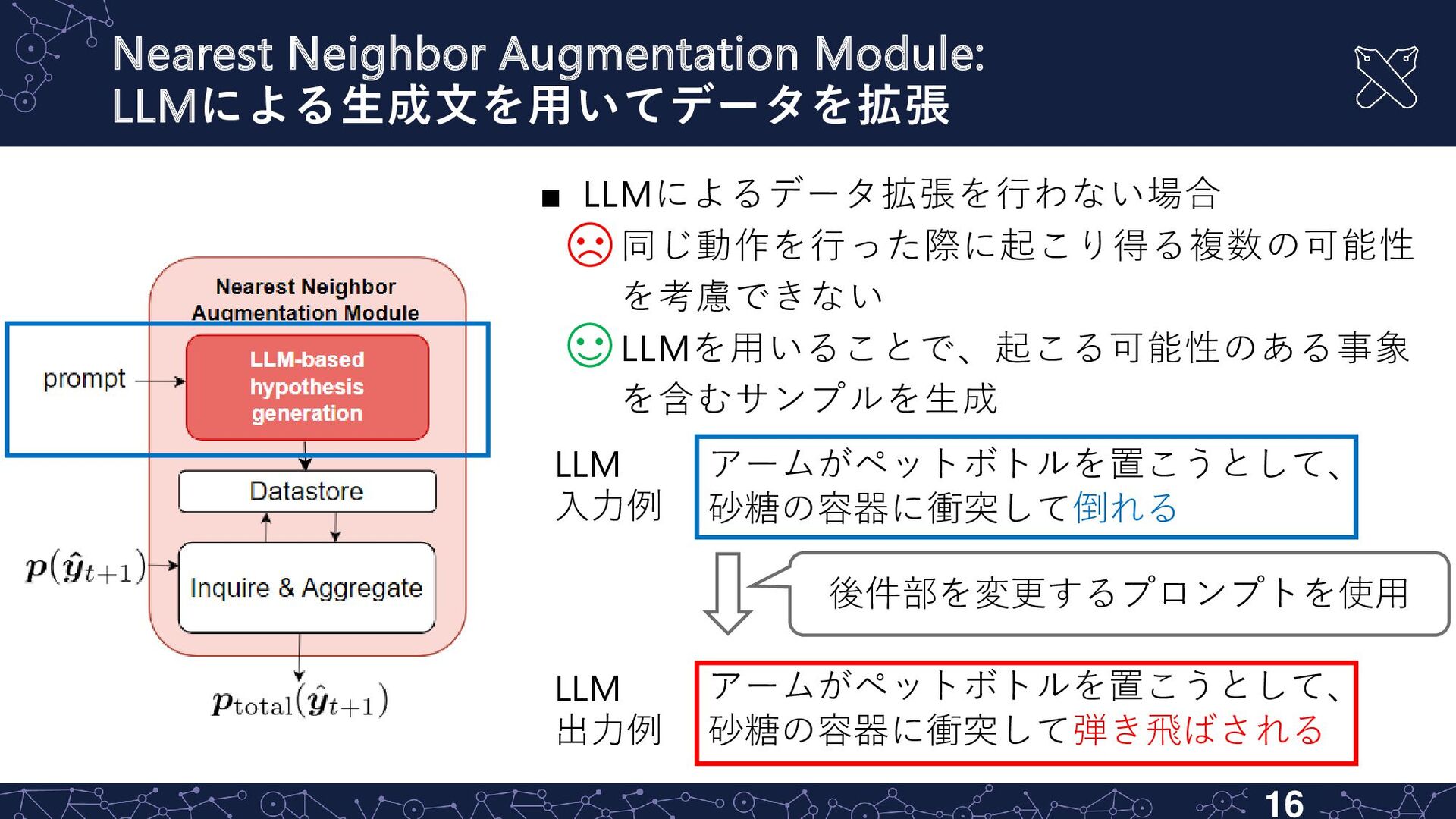
Nearest Neighbor Augmentation Module: LLMによる生成文を用いてデータを拡張 アームがペットボトルを置こうとして、 砂糖の容器に衝突して倒れる アームがペットボトルを置こうとして、 砂糖の容器に衝突して弾き飛ばされる LLM
入力例 LLM 出力例 16 ▪ LLMによるデータ拡張を行わない場合 同じ動作を行った際に起こり得る複数の可能性 を考慮できない LLMを用いることで、起こる可能性のある事象 を含むサンプルを生成 後件部を変更するプロンプトを使用
▪ Inquire & Aggregate ▪ Datastore: LLMを用いてデータを拡張した 訓練集合の潜在表現を事前に格納 ▪ 潜在表現に対して、Datastoreより𝑘近傍𝑁を
取得し、次トークンの予測確率𝑝knn ො 𝑦𝑡+1 を計算 ▪ rescore ▪ 最終的な出力を以下で計算 𝑝total ො 𝑦𝑡+1 = 𝜆𝑝 ො 𝑦𝑡+1 + (1 − 𝜆)𝑝knn ො 𝑦𝑡+1 Nearest Neighbor Augmentation Module: 𝒌近傍法を用いてdecoder の出力をrescore 17 decoder の出力
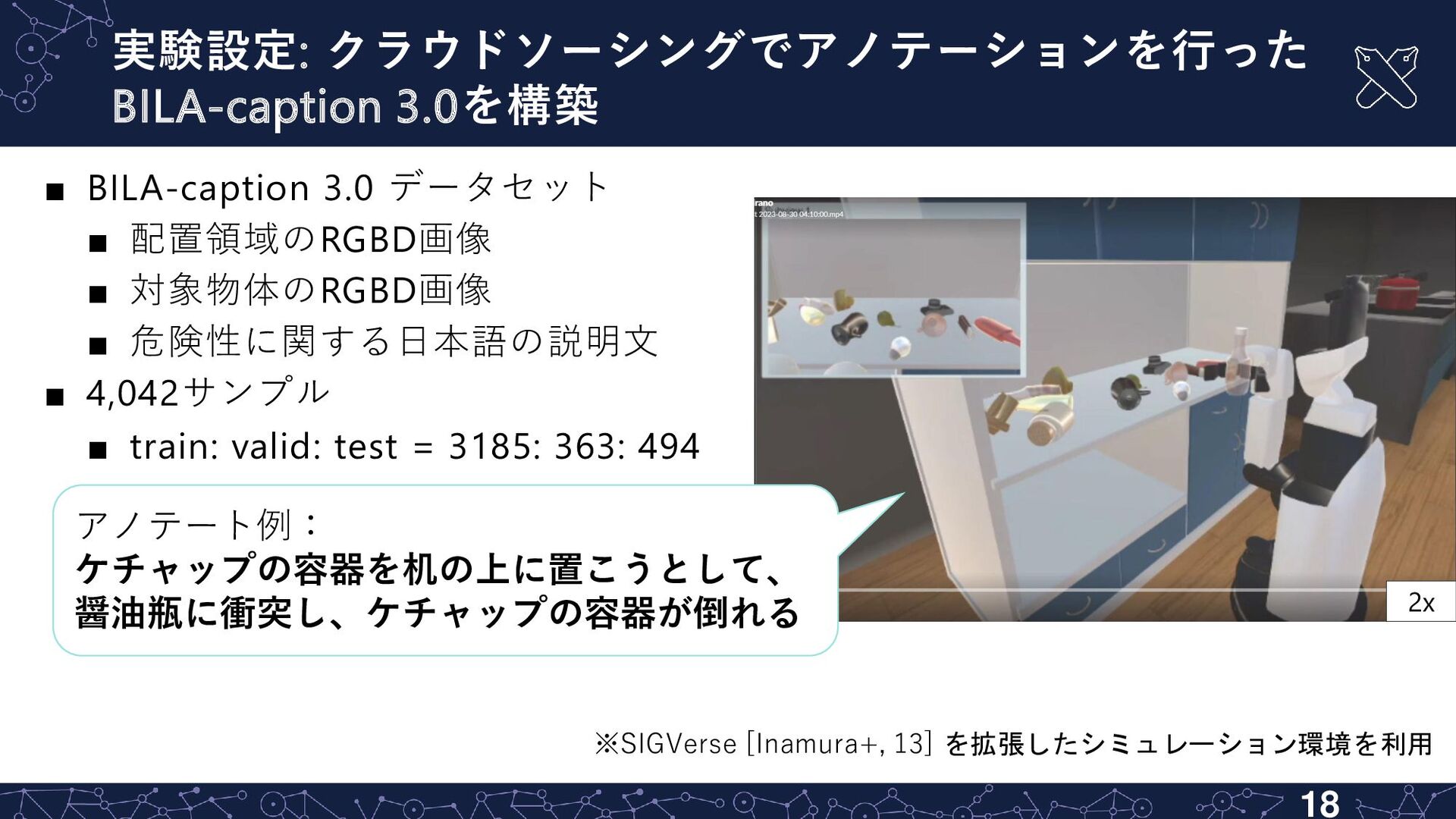
実験設定: クラウドソーシングでアノテーションを行った BILA-caption 3.0を構築 ▪ BILA-caption 3.0 データセット ▪ 配置領域のRGBD画像
▪ 対象物体のRGBD画像 ▪ 危険性に関する日本語の説明文 ▪ 4,042サンプル ▪ train: valid: test = 3185: 363: 494 アノテート例: ケチャップの容器を机の上に置こうとして、 醤油瓶に衝突し、ケチャップの容器が倒れる 18 ※SIGVerse [Inamura+, 13] を拡張したシミュレーション環境を利用 2x
定量的結果: すべての評価尺度で精度向上 ▪ 主要尺度JaSPICE [和田+, NLP23]において提案手法はベースライン手法を 2.96ポイント上回った ▪ 他の尺度も同様に、提案手法がそれぞれベースライン手法を上回った 手法
JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37± 0.76 22.95± 0.99 27.34±0.36 43.59±0.64 35.24±2.05 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 19
手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±
0.76 22.95± 0.99 27.34±0.36 43.59±0.64 35.24±2.05 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 定量的結果: すべての評価尺度で精度向上 + 2.96 ▪ 主要尺度JaSPICE [和田+, NLP23]において提案手法はベースライン手法を 2.96ポイント上回った ▪ 他の尺度も同様に、提案手法がそれぞれベースライン手法を上回った 20
手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±
0.76 22.95± 0.99 27.34±0.36 43.59±0.64 35.24±2.05 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 定量的結果: すべての評価尺度で精度向上 + 2.96 ▪ 主要尺度JaSPICE [和田+, NLP23]において提案手法はベースライン手法を 2.96ポイント上回った ▪ 他の尺度も同様に、提案手法がそれぞれベースライン手法を上回った 21 日本語における人間による評価との相関が 他の自動評価尺度と比較して最も高い
手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±
0.76 22.95± 0.99 27.34±0.36 43.59±0.64 35.24±2.05 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 定量的結果: すべての評価尺度で精度向上 ▪ 主要尺度JaSPICE [和田+, NLP23]において提案手法はベースライン手法を 2.96ポイント上回った ▪ 他の尺度も同様に、提案手法がそれぞれベースライン手法を上回った 22
定性的結果(成功例): 衝突物体を正しく表現 配置領域 対称物体 正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所
にペットボトルと接触してしまい、ルービックキューブが棚の上で倒れる Ours アームがルービックキューブを机の上に置こうとしたが、マヨネーズの容器 に衝突し、マヨネーズの容器が少し動く 23 2x
正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所 にペットボトルと接触してしまい、ルービックキューブが棚の上で倒れる Ours アームがルービックキューブを机の上に置こうとしたが、マヨネーズの容器 に衝突し、マヨネーズの容器が少し動く
定性的結果(成功例): 衝突物体を正しく表現 配置領域 対称物体 24 2x 衝突物体が 不適切
正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所 にペットボトルと接触してしまい、ルービックキューブが棚の上で倒れる Ours アームがルービックキューブを机の上に置こうとしたが、マヨネーズの容器 に衝突し、マヨネーズの容器が少し動く
定性的結果(成功例): 衝突物体を正しく表現 配置領域 対称物体 25 衝突物体に関して 適切に記述 2x
Ablation Study: 各モジュールの有効性を確認 ▪ LLMによるデータ拡張が提案手法の性能へ影響が最も大きい Ablation 条件 JaSPICE BLEU4 METEOR
ROUGE-L CIDEr-D w/o NNAM 21.40±0.67 25.31±0.96 28.90±0.47 45.34±0.65 37.48±2.60 w/o PCAD 21.60±0.78 24.71±1.00 29.05±0.14 45.27±0.56 37.95±2.20 w/o SAB 21.61±0.39 25.13±1.13 29.20±0.35 45.49±0.77 38.03±2.69 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 26
Ablation Study: 各モジュールの有効性を確認 ▪ LLMによるデータ拡張が提案手法の性能へ影響が最も大きい Ablation 条件 JaSPICE BLEU4 METEOR
ROUGE-L CIDEr-D w/o NNAM 21.40±0.67 25.31±0.96 28.90±0.47 45.34±0.65 37.48±2.60 w/o PCAD 21.60±0.78 24.71±1.00 29.05±0.14 45.27±0.56 37.95±2.20 w/o SAB 21.61±0.39 25.13±1.13 29.20±0.35 45.49±0.77 38.03±2.69 Ours 22.33±0.60 25.92±0.55 28.98±0.55 45.60±0.51 39.85±1.39 27
定性的結果(失敗例): 障害物名の生成誤り 28 正解文 アームがつかんだりんごを、机の上にある倒れた砂時計にぶつけながら置く NNFC [小松+, JSAI23] アームがリンゴを棚に置くとき、アームとペットボトルが衝突し、その反動 でペットボトルが少し動く
Ours アームがリンゴを机の上のペットボトルにぶつけた反動でペットボトルが少 し机の上から落下した 配置領域 2x attention map
定性的結果(失敗例): 障害物名の生成誤り 配置領域 attention map 29 正解文 アームがつかんだりんごを、机の上にある倒れた砂時計にぶつけながら置く NNFC [小松+,
JSAI23] アームがリンゴを棚に置くとき、アームとペットボトルが衝突し、その反動 でペットボトルが少し動く Ours アームがリンゴを机の上のペットボトルにぶつけた反動でペットボトルが少 し机の上から落下した 衝突物体が 不適切 衝突物体が 不適切 2x
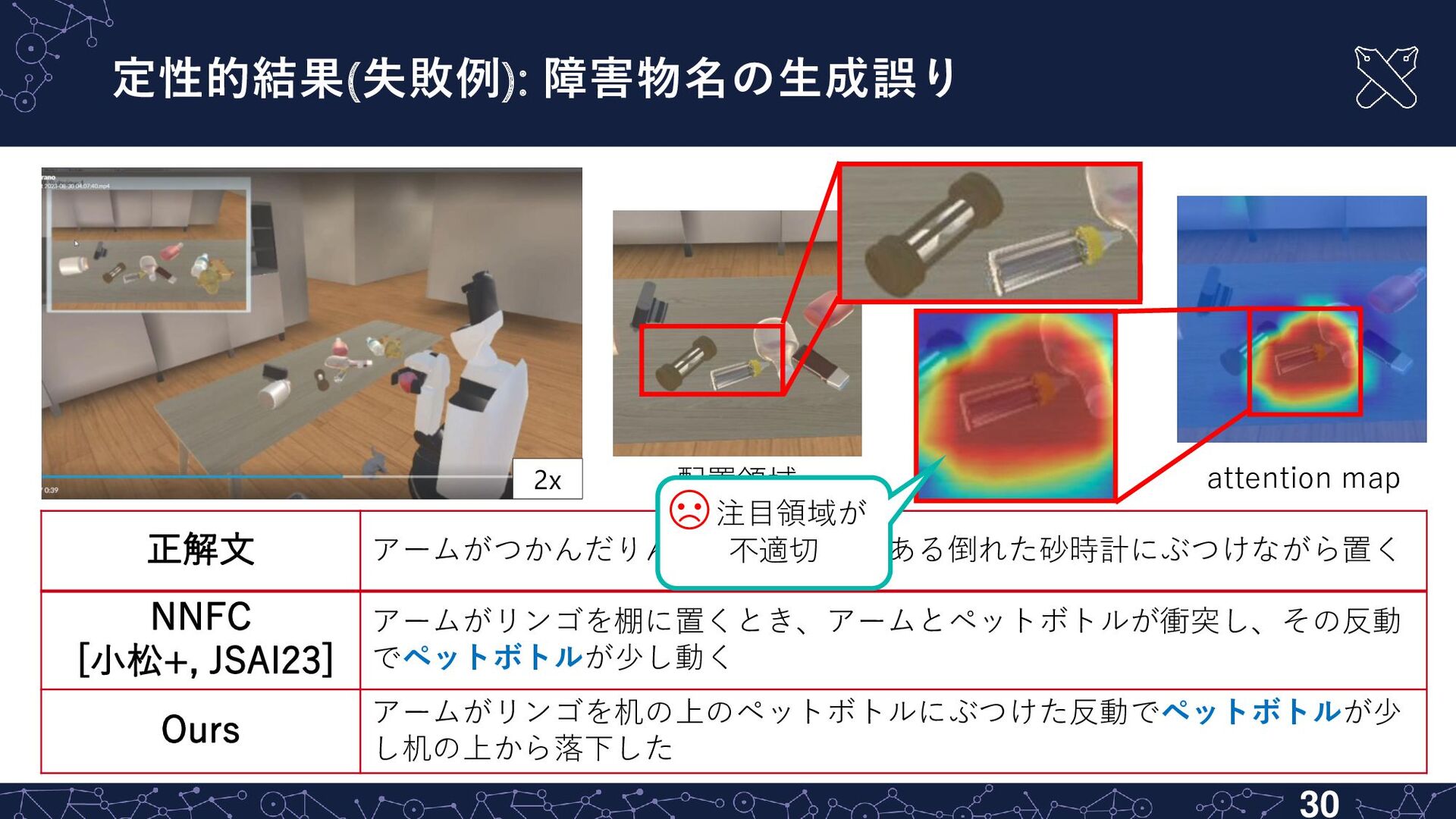
定性的結果(失敗例): 障害物名の生成誤り 配置領域 attention map 30 正解文 アームがつかんだりんごを、机の上にある倒れた砂時計にぶつけながら置く NNFC [小松+,
JSAI23] アームがリンゴを棚に置くとき、アームとペットボトルが衝突し、その反動 でペットボトルが少し動く Ours アームがリンゴを机の上のペットボトルにぶつけた反動でペットボトルが少 し机の上から落下した 2x 注目領域が 不適切
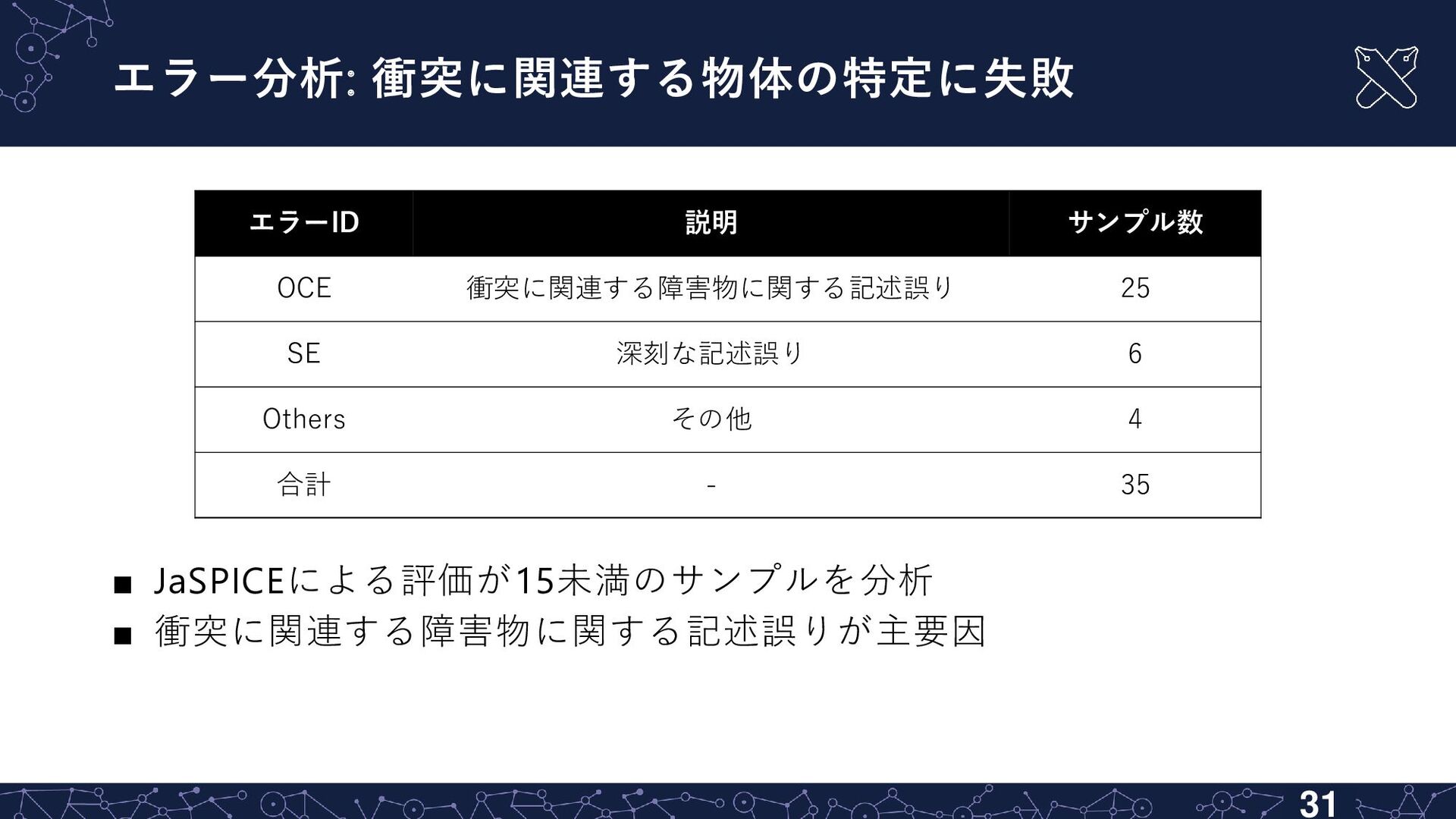
エラー分析: 衝突に関連する物体の特定に失敗 31 エラーID 説明 サンプル数 OCE 衝突に関連する障害物に関する記述誤り 25 SE
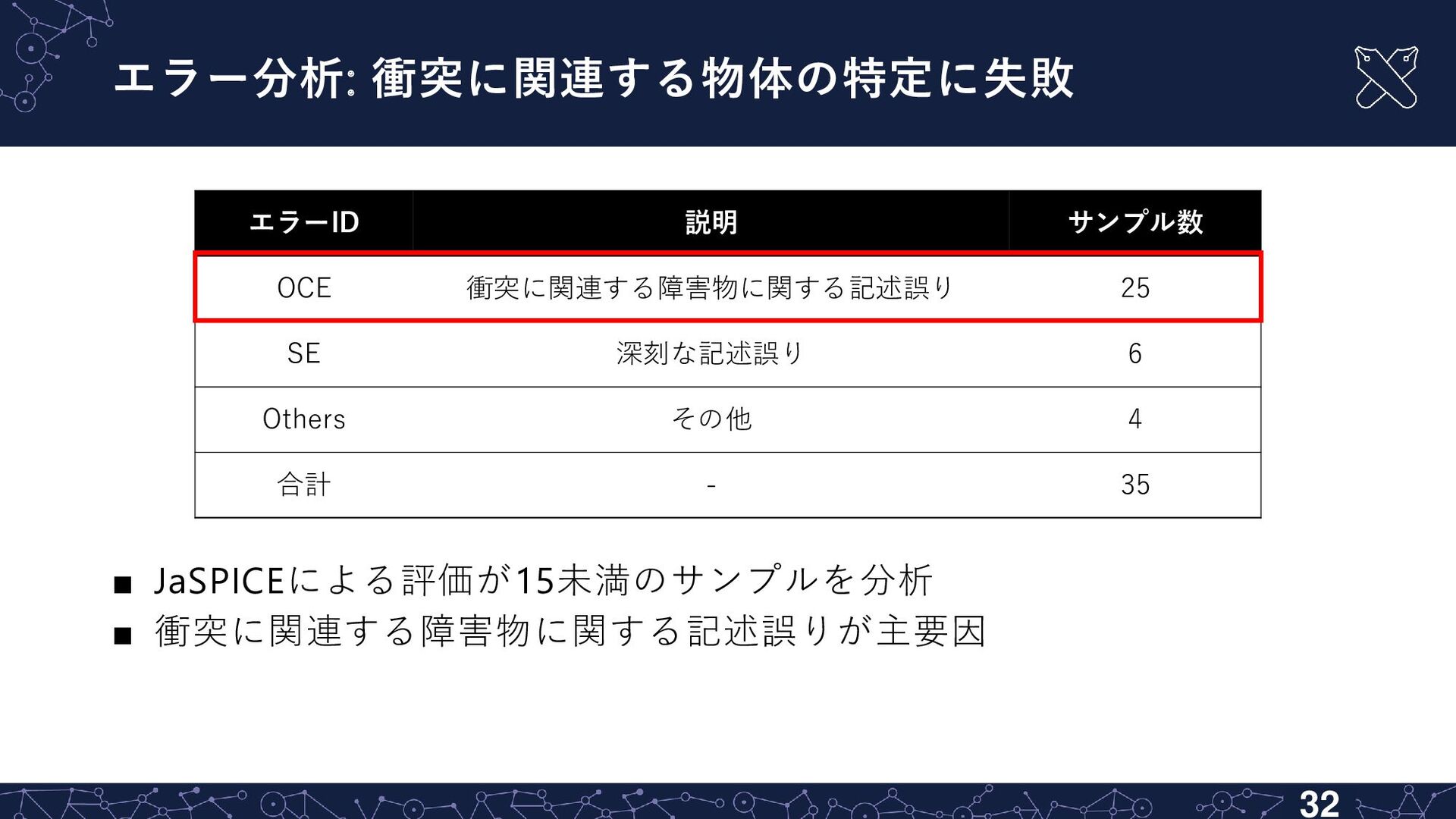
深刻な記述誤り 6 Others その他 4 合計 - 35 ▪ JaSPICEによる評価が15未満のサンプルを分析 ▪ 衝突に関連する障害物に関する記述誤りが主要因
エラー分析: 衝突に関連する物体の特定に失敗 32 エラーID 説明 サンプル数 OCE 衝突に関連する障害物に関する記述誤り 25 SE
深刻な記述誤り 6 Others その他 4 合計 - 35 ▪ JaSPICEによる評価が15未満のサンプルを分析 ▪ 衝突に関連する障害物に関する記述誤りが主要因
まとめ ▪ Enhanced Nearest-neighbor Captioning with Hypothesis AugmeNTation (ENCHANT) の提案
▪ 大規模言語モデルによる生成文を用いてデータを拡張 ▪ 主要な評価尺度において、ベースライン手法を上回る結果を獲得 33
Appendix 損失関数: 交差エントロピーおよびInfoNCE損失を使用 ▪ 損失関数 ▪ 𝐿 = 𝜆𝐶𝐸 𝐿𝐶𝐸
+ 𝜆𝑁𝐶𝐸 𝐿𝑁𝐶𝐸 𝐿𝐶𝐸 = CE(𝑦𝑡+1 , 𝑝 ො 𝑦𝑡+1 ) : 交差エントロピー損失 𝐿𝑁𝐶𝐸 = infoNCE(𝒉𝑖𝑚𝑔 , 𝒉𝑡𝑥𝑡 ) : infoNCE損失 [Radford+, ICML21] 34
{kind=link}
{kind=link}
{kind=link}
![関連研究: 事前に衝突を予測し説明することは困難 4 手法名 内容 CLEVRER [Yi+, ICLR20] 物体同士の衝突に関するデータセットを構築 多様な形状の物体に対応していない](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_3.jpg){kind=link}
![Nearest Neighbor Future Captioning (NNFC) 5 入力 NNLM [Uravashi+, ICLR21]](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_4.jpg){kind=link}
![Nearest Neighbor Future Captioning (NNFC) 6 入力 NNLM [Uravashi+, ICLR21]](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_5.jpg){kind=link}
![Nearest Neighbor Future Captioning (NNFC) 7 NNLM [Uravashi+, ICLR21] をマルチモーダル言語生成に導入](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_6.jpg){kind=link}
![Nearest Neighbor Future Captioning (NNFC) 8 NNLM [Uravashi+, ICLR21] をマルチモーダル言語生成に導入](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![定量的結果: すべての評価尺度で精度向上 ▪ 主要尺度JaSPICE [和田+, NLP23]において提案手法はベースライン手法を 2.96ポイント上回った ▪ 他の尺度も同様に、提案手法がそれぞれベースライン手法を上回った 手法](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_18.jpg){kind=link}
![手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_19.jpg){kind=link}
![手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_20.jpg){kind=link}
![手法 JaSPICE BLEU4 METEOR ROUGE-L CIDEr-D NNFC [小松+, JSAI23] 19.37±](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_21.jpg){kind=link}
![定性的結果(成功例): 衝突物体を正しく表現 配置領域 対称物体 正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_22.jpg){kind=link}
![正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所 にペットボトルと接触してしまい、ルービックキューブが棚の上で倒れる Ours アームがルービックキューブを机の上に置こうとしたが、マヨネーズの容器 に衝突し、マヨネーズの容器が少し動く](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_23.jpg){kind=link}
![正解文 アームがつかんでいたルービックキューブをテーブルの上に置き、ルービッ クキューブとマヨネーズが衝突する NNFC [小松+,JSAI23] アームがルービックキューブを机の上に置こうとしたが、おこうとした場所 にペットボトルと接触してしまい、ルービックキューブが棚の上で倒れる Ours アームがルービックキューブを机の上に置こうとしたが、マヨネーズの容器 に衝突し、マヨネーズの容器が少し動く](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_24.jpg){kind=link}
{kind=link}
{kind=link}
![定性的結果(失敗例): 障害物名の生成誤り 28 正解文 アームがつかんだりんごを、机の上にある倒れた砂時計にぶつけながら置く NNFC [小松+, JSAI23] アームがリンゴを棚に置くとき、アームとペットボトルが衝突し、その反動 でペットボトルが少し動く](https://files.speakerdeck.com/presentations/8e7623b1b25b4c7a8a8db91716c23e39/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}