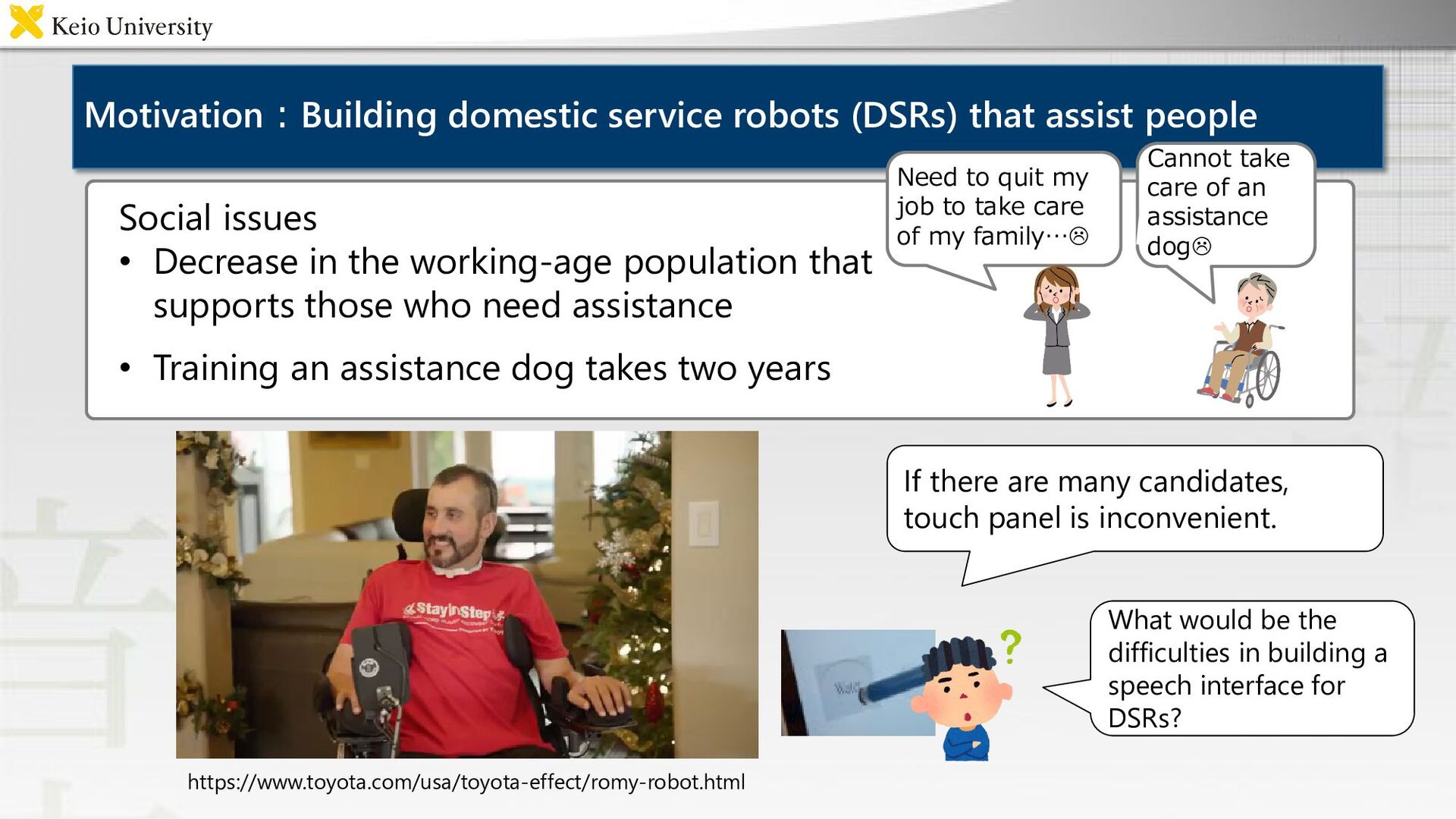
would be the difficulties in building a speech interface for DSRs? If there are many candidates, touch panel is inconvenient. Social issues • Decrease in the working-age population that supports those who need assistance • Training an assistance dog takes two years Need to quit my job to take care of my family… Cannot take care of an assistance dog
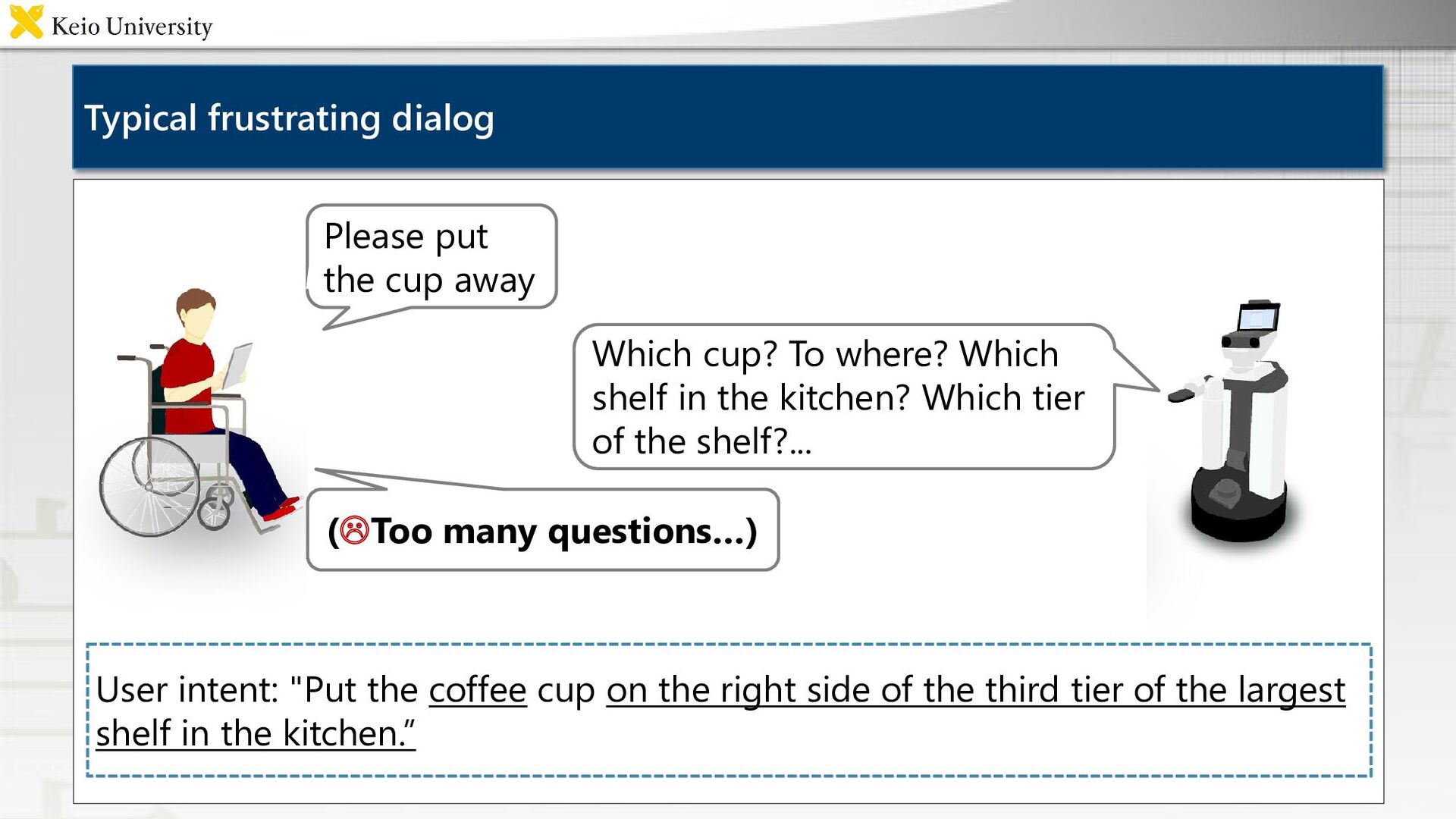
the right side of the third tier of the largest shelf in the kitchen.” Which cup? To where? Which shelf in the kitchen? Which tier of the shelf?... Please put the cup away (Too many questions…)
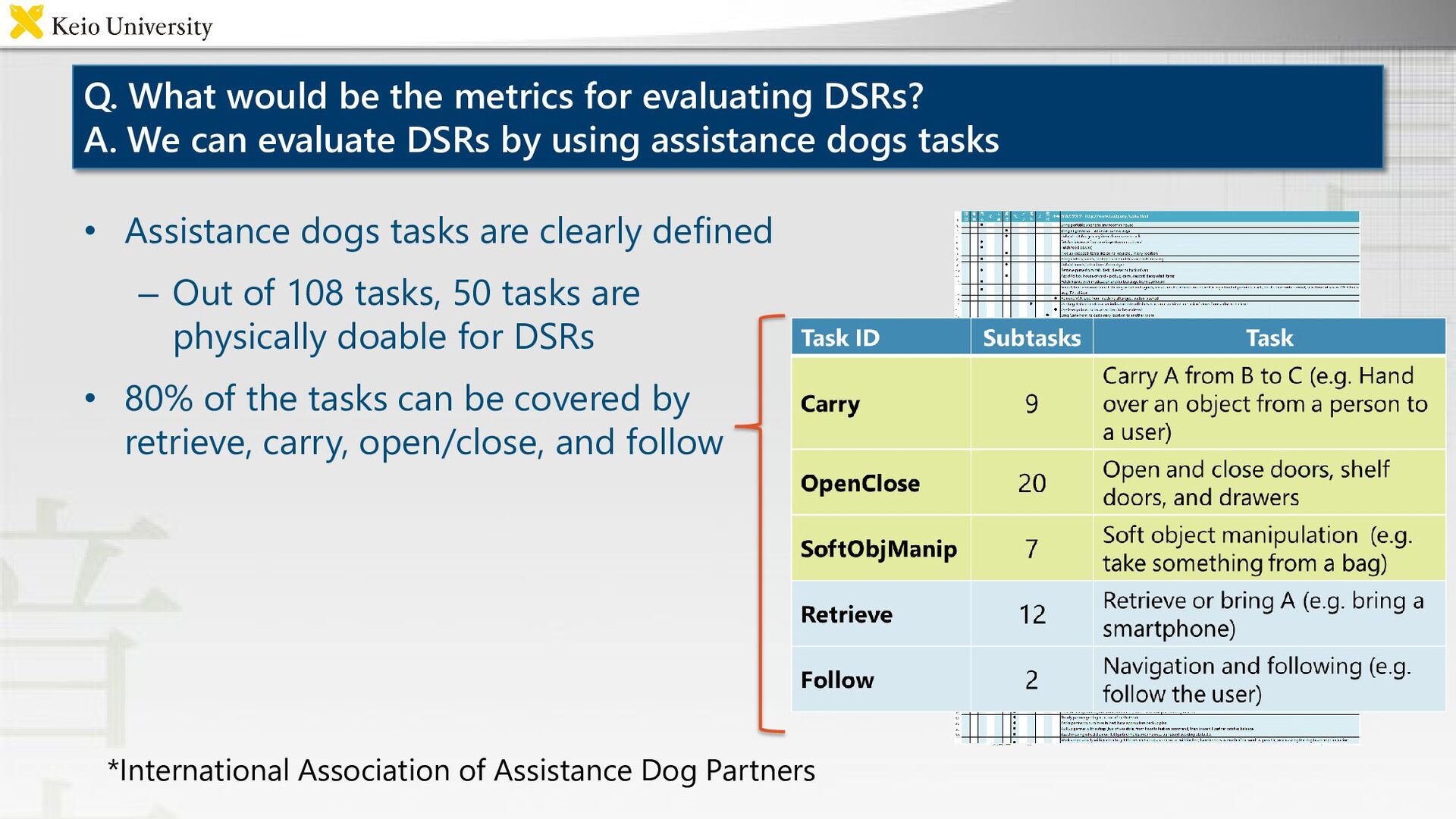
We can evaluate DSRs by using assistance dogs tasks • Assistance dogs tasks are clearly defined – Out of 108 tasks, 50 tasks are physically doable for DSRs • 80% of the tasks can be covered by retrieve, carry, open/close, and follow *International Association of Assistance Dog Partners
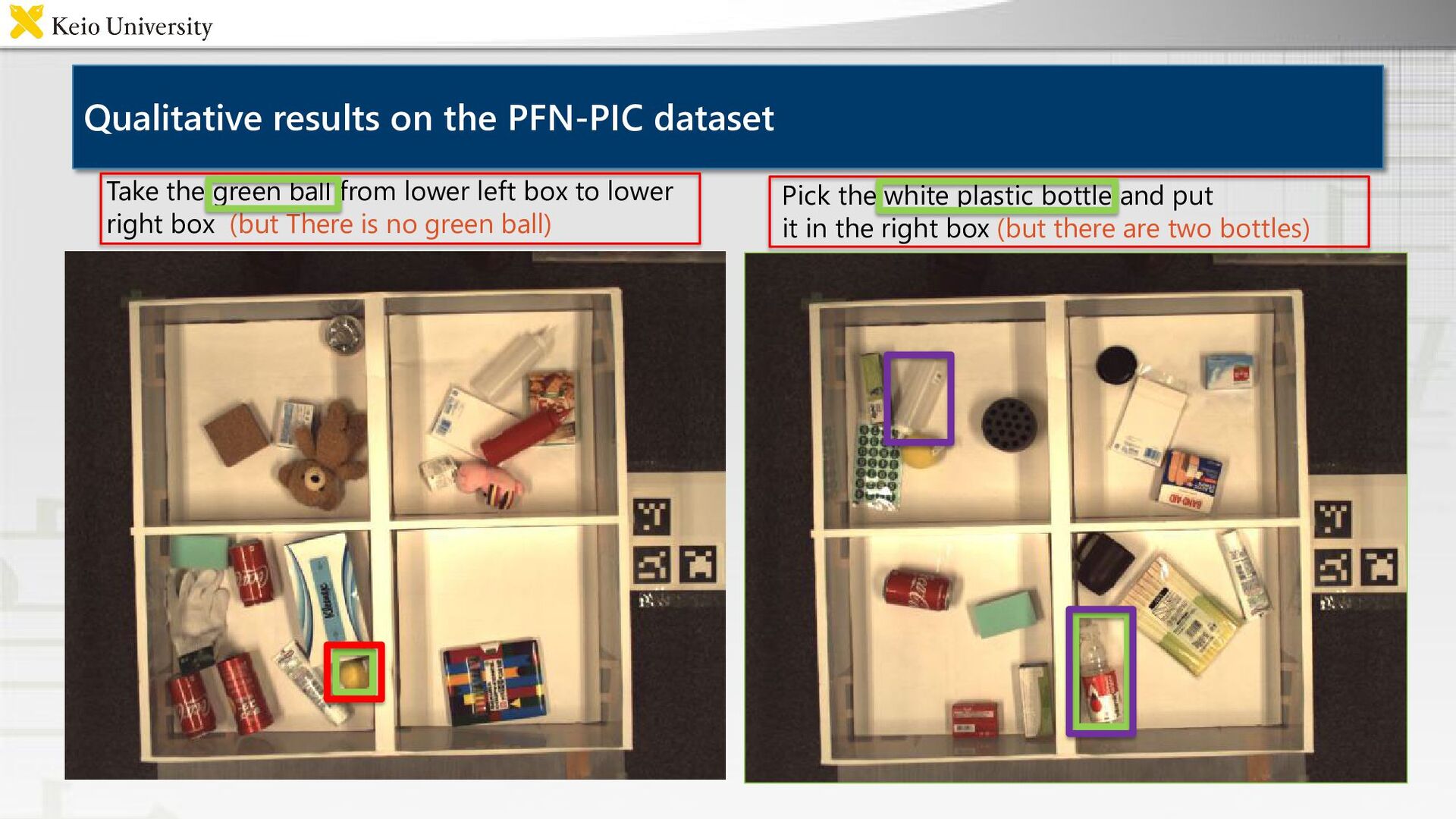
from lower left box to lower right box (but There is no green ball) Pick the white plastic bottle and put it in the right box (but there are two bottles)
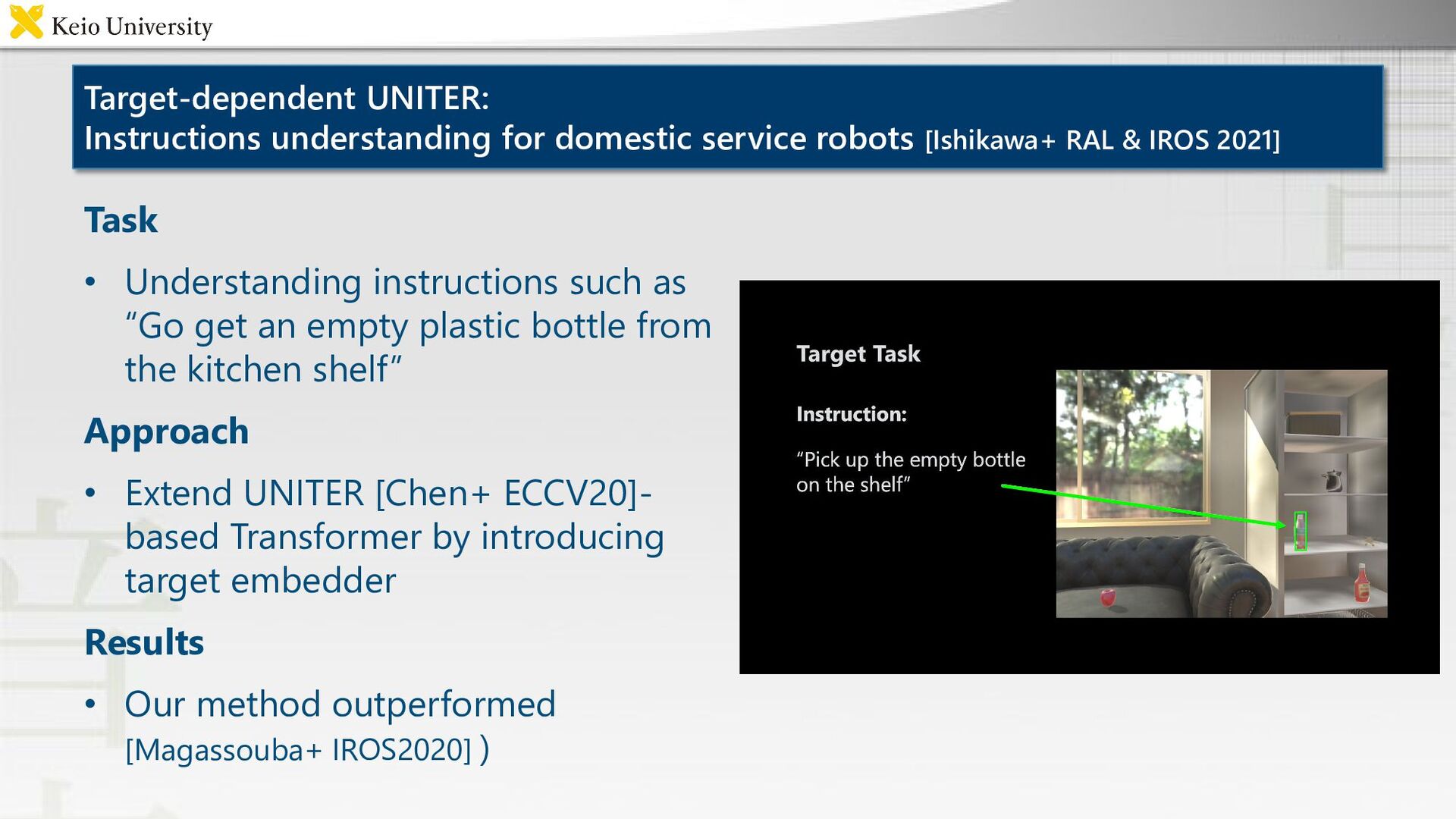
& IROS 2021] Task • Understanding instructions such as “Go get an empty plastic bottle from the kitchen shelf” Approach • Extend UNITER [Chen+ ECCV20]- based Transformer by introducing target embedder Results • Our method outperformed [Magassouba+ IROS2020] )
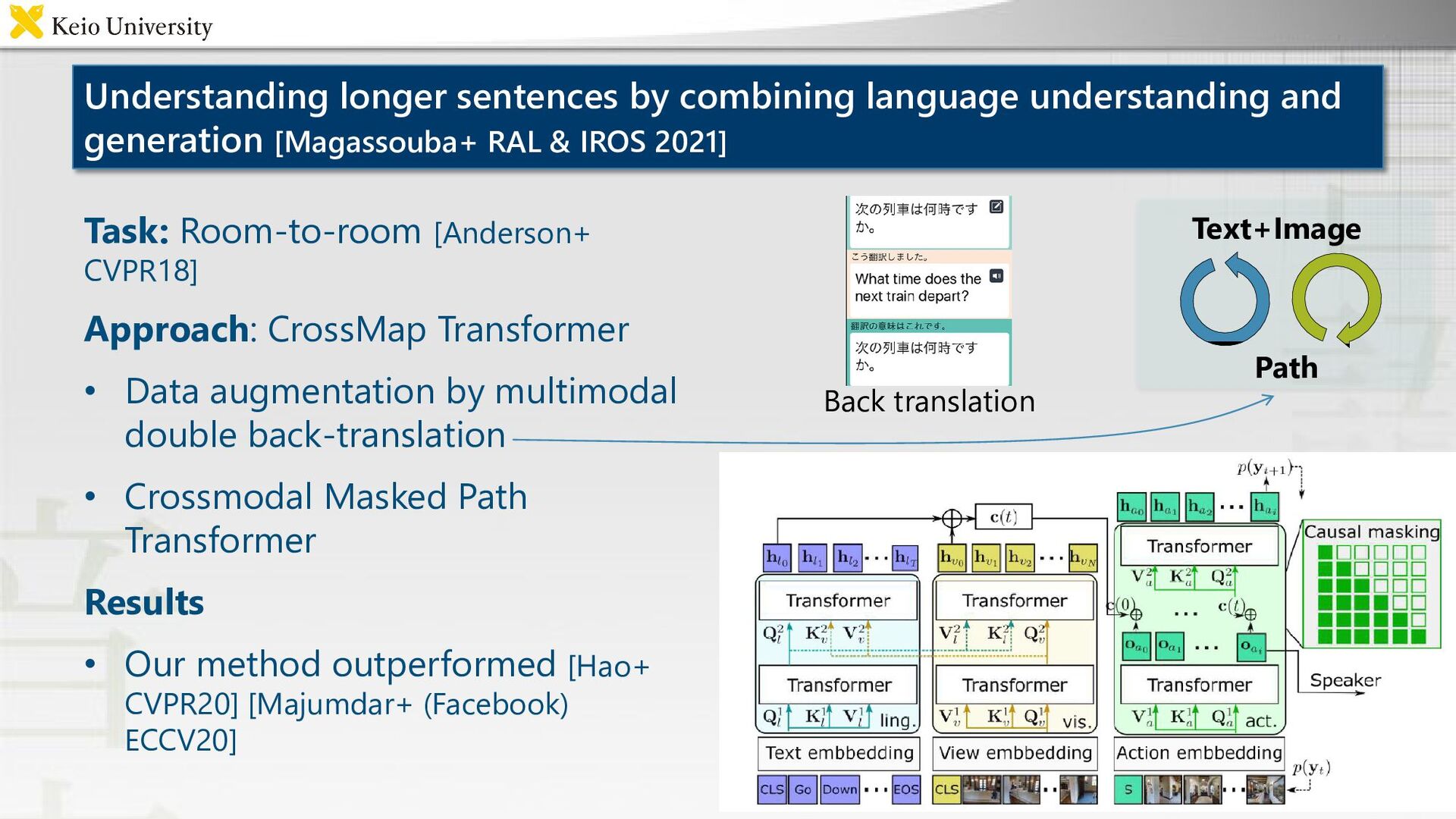
long sentences • E.g. :“Walk through the bedroom and out of the door into the hallway. Walk down the hall along the banister rail … bedroom with a round mirror on the wall and butterfly sculpture.” VLN-BERT ②ALFRED [Shridhar+ CVPR20] • Difficulty: Subgoals are not specified • E.g. : Put a clean apple on a wooden table = Pick up an apple + Wash the apple in the sink + Put the apple on a wooden table
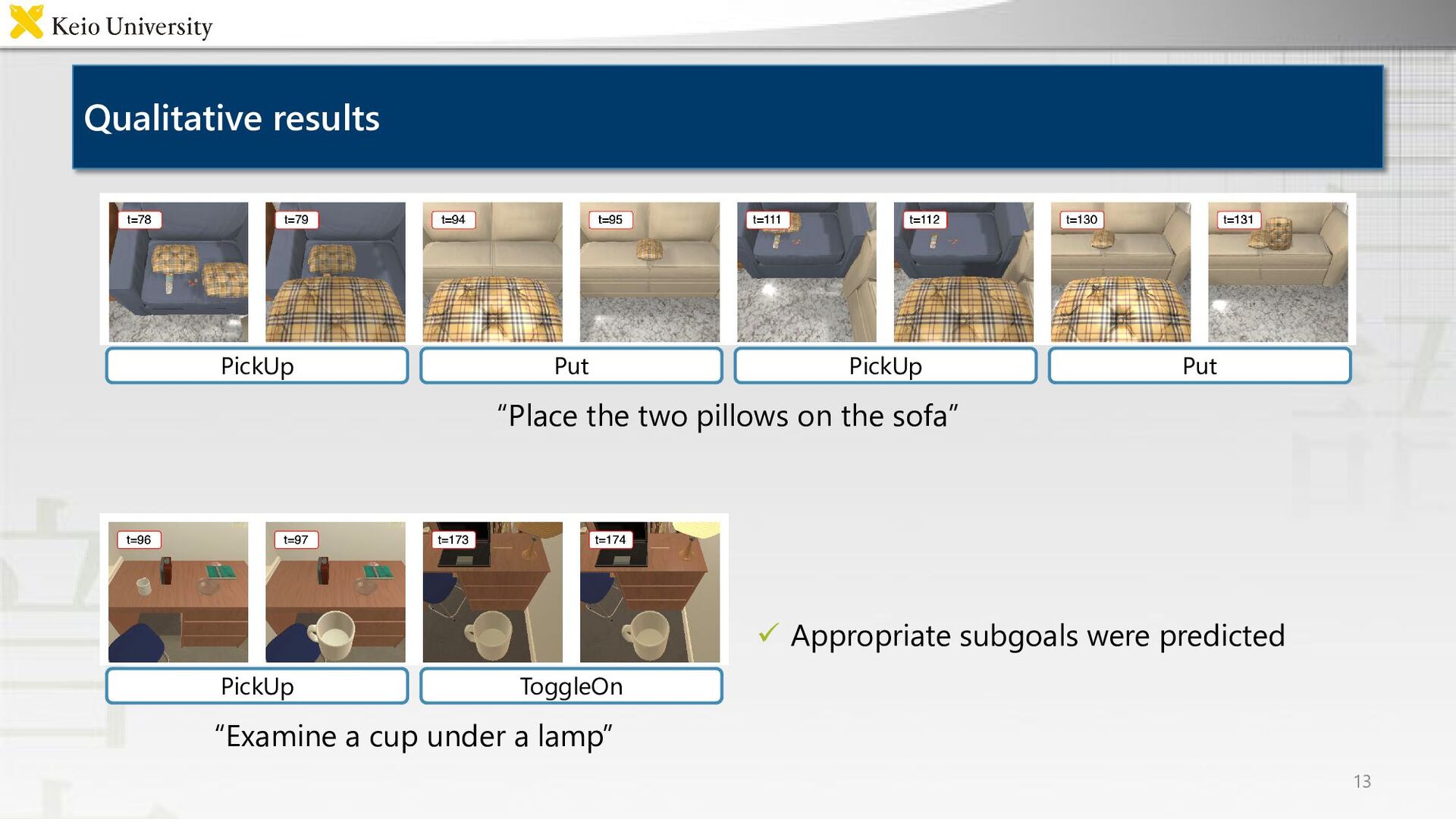
• Introduced Moment-based Adversarial Training to (text, action history, environmental states) Results • Our method outperformed [Zhang+ ACL21] [Blukis+(NVIDIA) CoRL21] Method SR unknown SR known [Zhang+ ACL21] 11.12 13.63 [Blukis+ CoRL21] 20.27 29.94 Ours 21.84 33.01 Human performance 91.00 - Our method successfully predicted unspecified subgoals of "put down the knife you used," whereas the existing method failed “Place a cooked potato slice in the fridge”
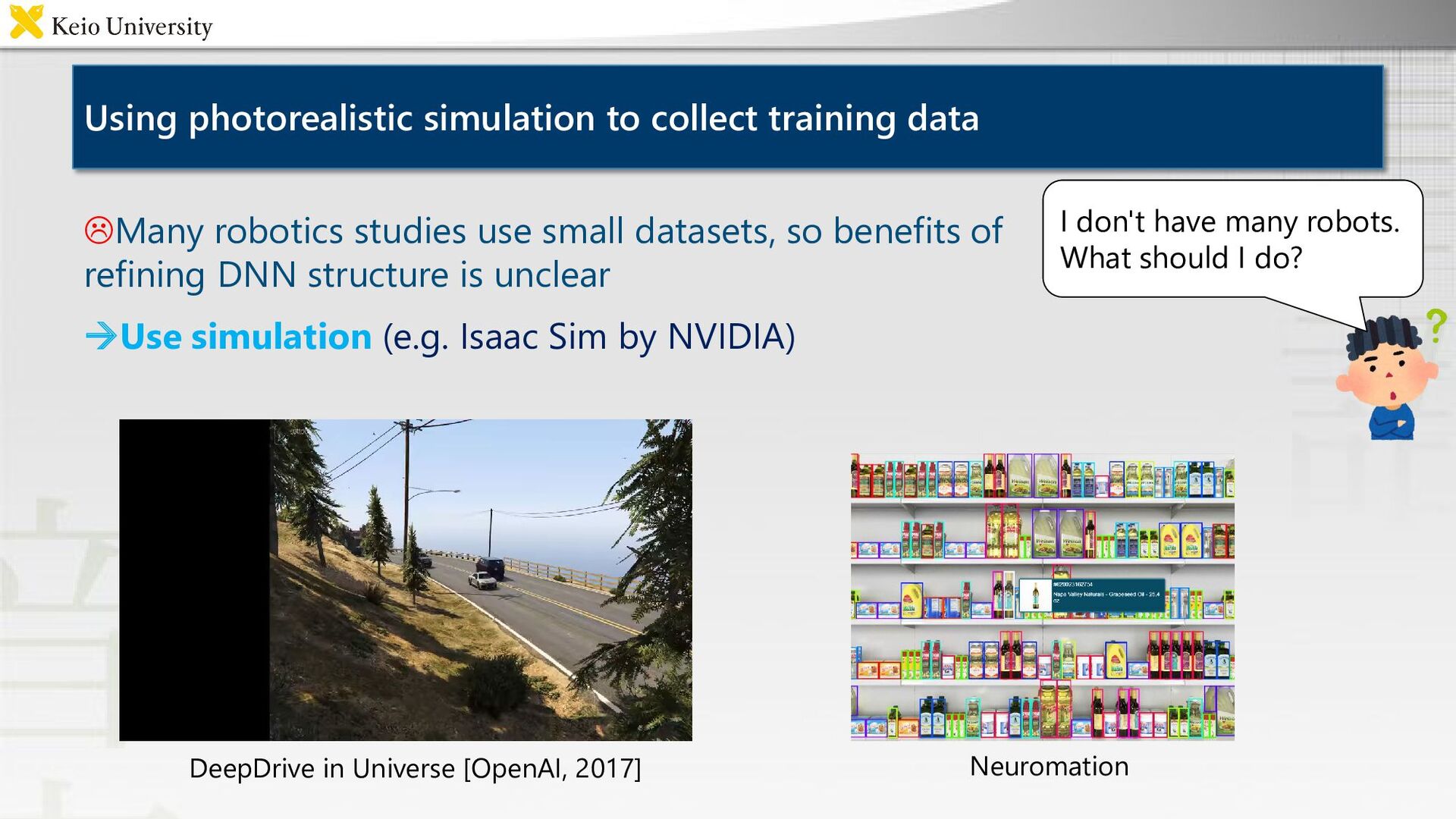
use small datasets, so benefits of refining DNN structure is unclear Use simulation (e.g. Isaac Sim by NVIDIA) I don't have many robots. What should I do? DeepDrive in Universe [OpenAI, 2017] Neuromation
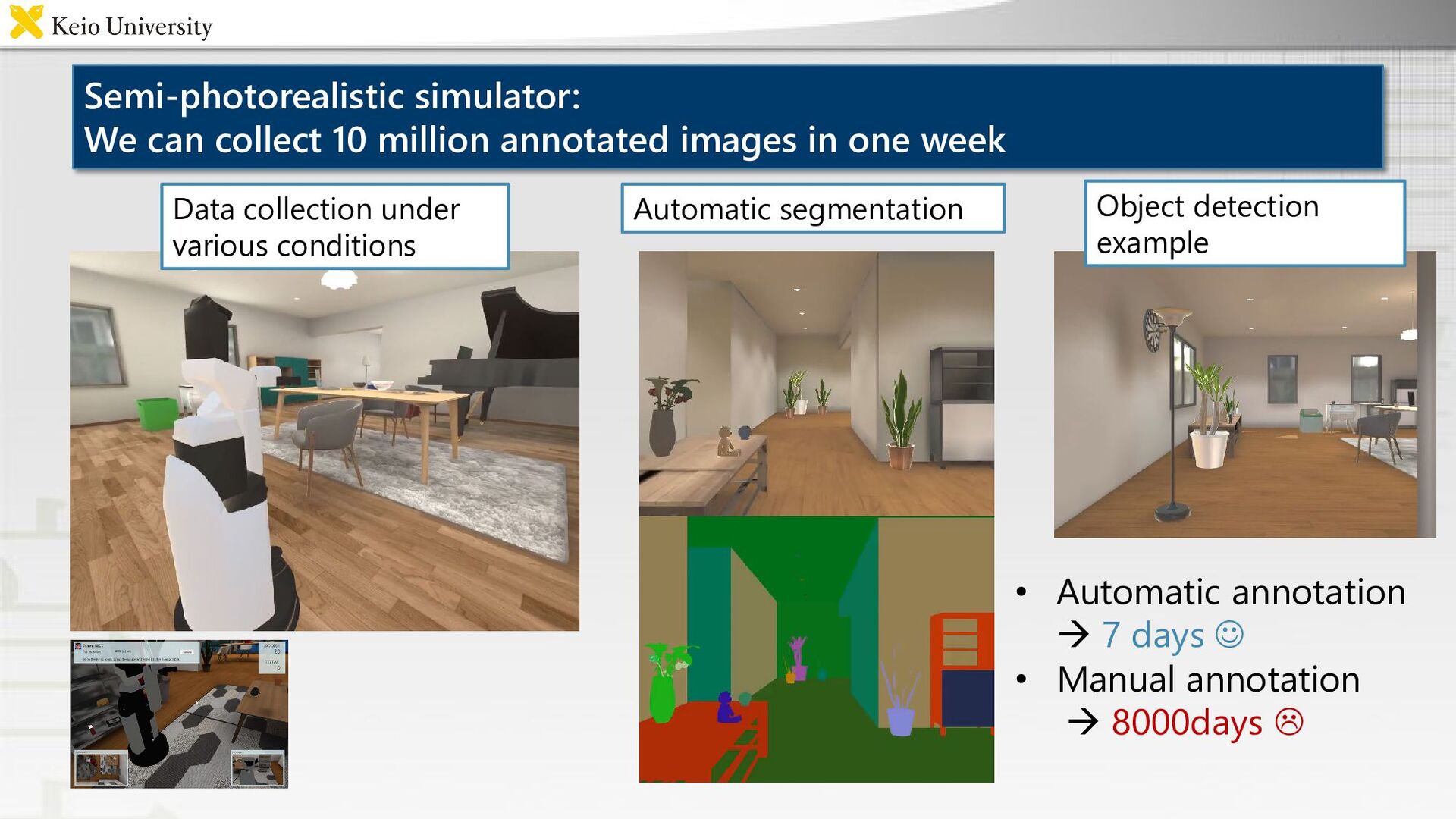
one week Automatic segmentation Object detection example • Automatic annotation 7 days • Manual annotation 8000days Data collection under various conditions
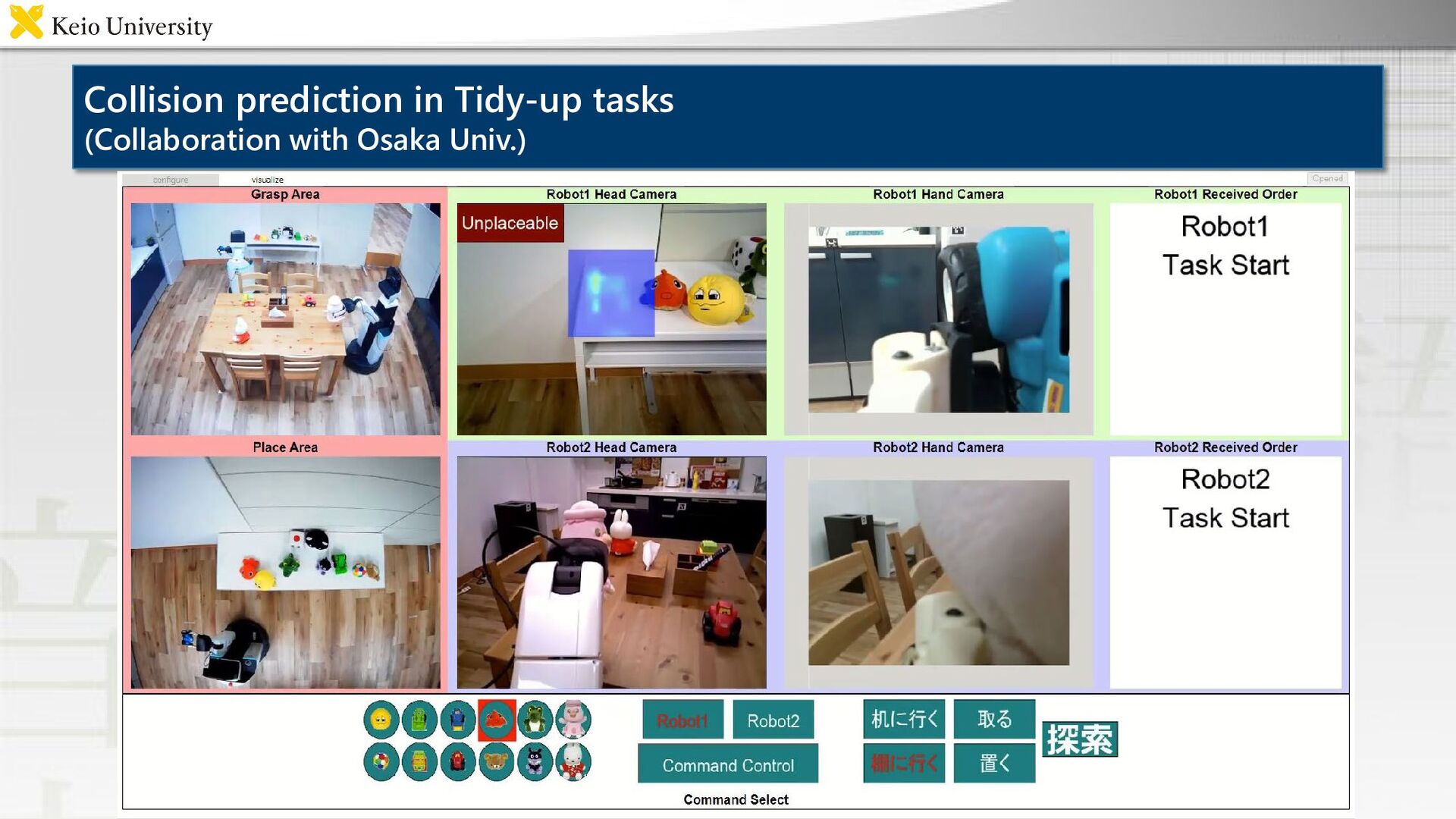
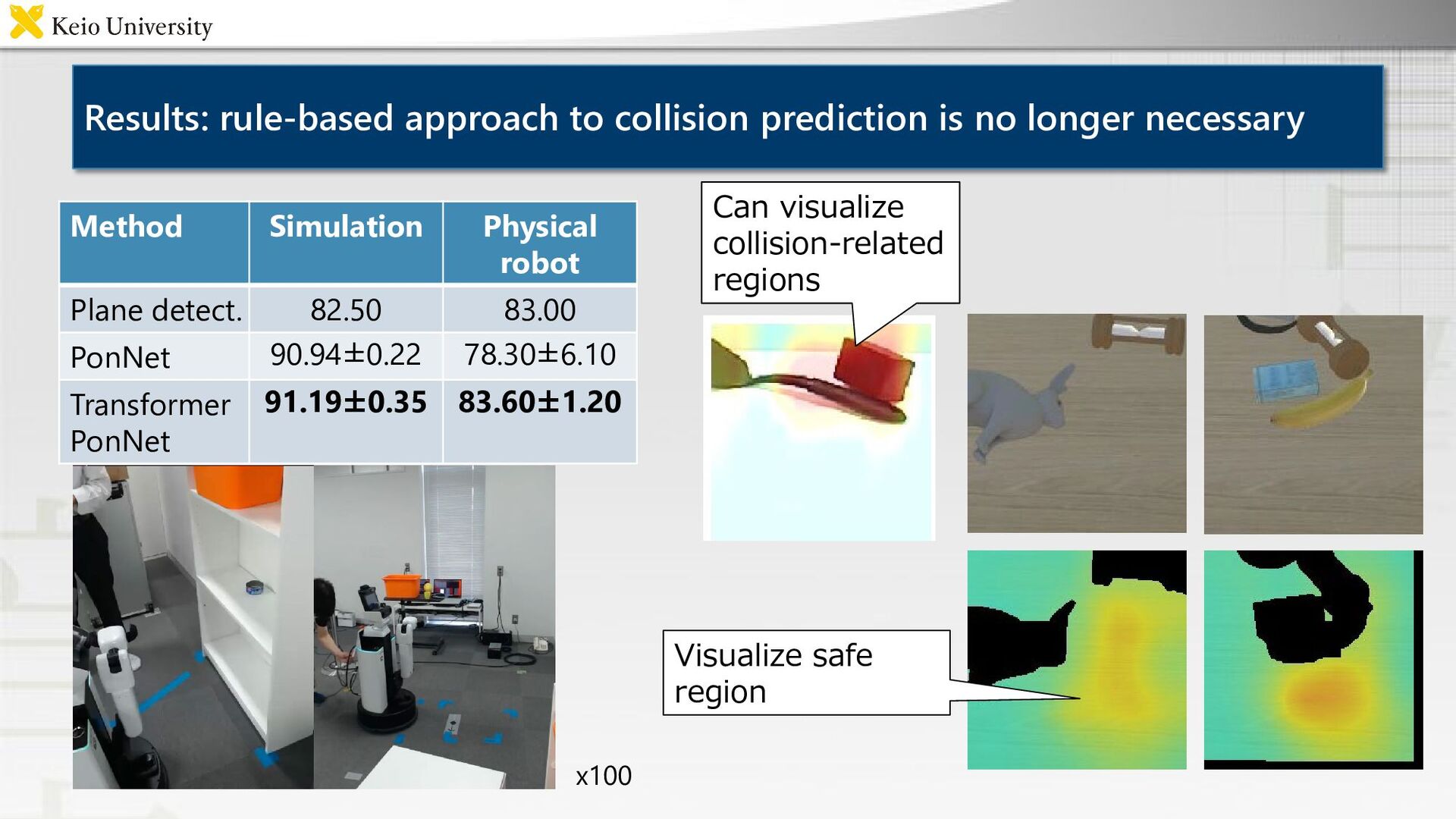
• Predicting/explaining consequences of actions in advance is useful to prevent damaging collisions Technical point: • Attention Branch Network (ABN) [Fukui+ CVPR19] is extended for RGB and depth • Semi-photorealistic simulation
78.30±6.10 Transformer PonNet 91.19±0.35 83.60±1.20 Results: rule-based approach to collision prediction is no longer necessary Can visualize collision-related regions x100 Visualize safe region
competition for DSRs • 20-30 participations • Won 1st place (2008, 2010), 2nd place (2009, 2011) World Robot Summit (WRS 2018) Partner Robot Challenge Virtual Space • Randomly generated conditions (start, goal, object placement, etc) • Won 1st place (award money =74k USD) Instructions are manually given and fixed
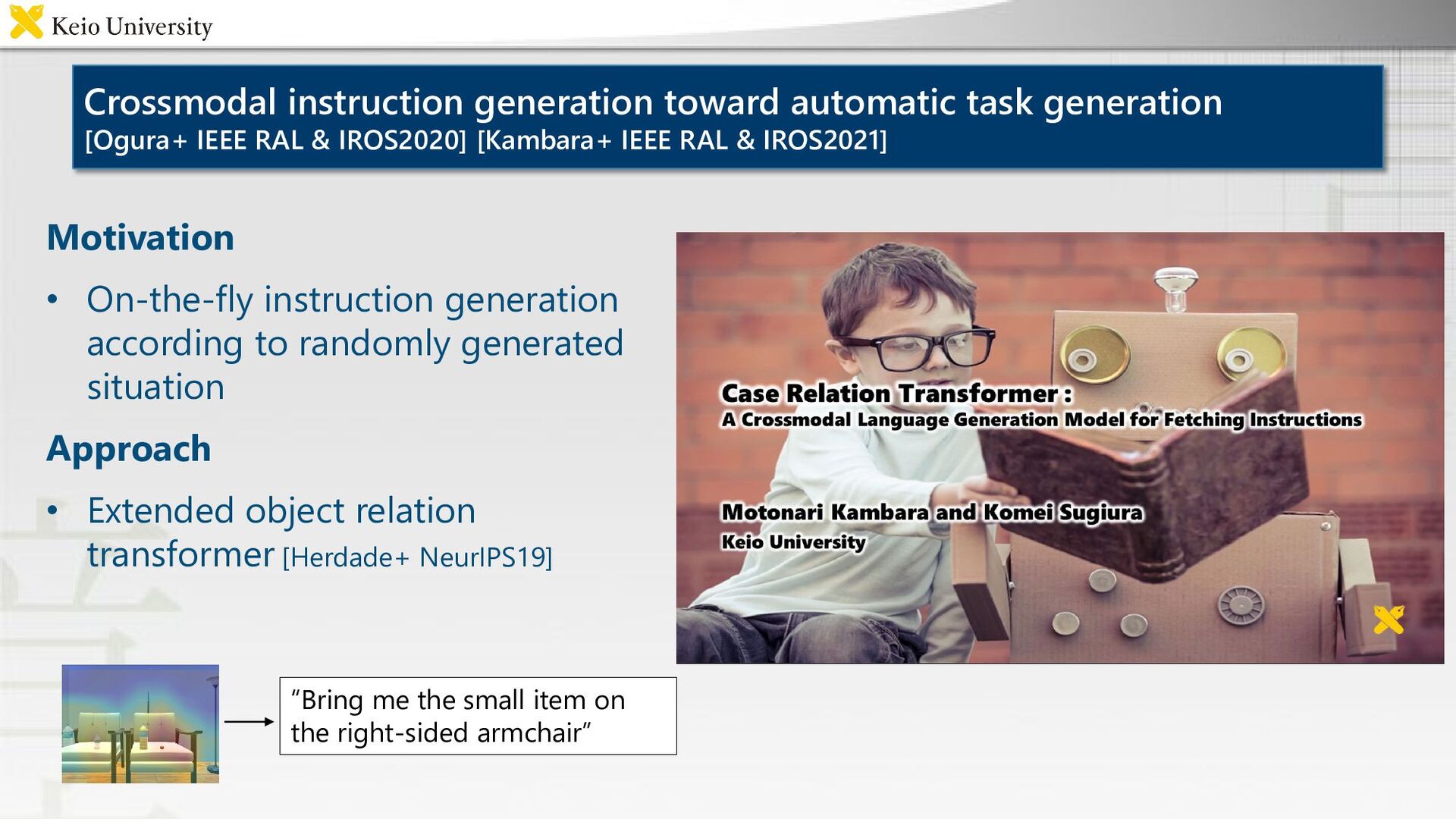
& IROS2020] [Kambara+ IEEE RAL & IROS2021] Motivation • On-the-fly instruction generation according to randomly generated situation Approach • Extended object relation transformer [Herdade+ NeurIPS19] “Bring me the small item on the right-sided armchair”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![MTCM with Attention Branches [Magassouba+ IEEE RAL & IROS2019] [Magassouba+](https://files.speakerdeck.com/presentations/ec5d9939da624f72a9c0d8caf0f534ea/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
![Vision and language navigation tasks ①Room2Room [Anderson+ CVPR18] • Difficulty:](https://files.speakerdeck.com/presentations/ec5d9939da624f72a9c0d8caf0f534ea/slide_9.jpg){kind=link}
{kind=link}
![Understanding mobile manipulation instructions by HLSM-MAT [Ishikawa+ IEEE ICPR22] Approach](https://files.speakerdeck.com/presentations/ec5d9939da624f72a9c0d8caf0f534ea/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![PonNet: Predicting and explaining collisions [Magassouba+ Advanced Robotics 2021] Background:](https://files.speakerdeck.com/presentations/ec5d9939da624f72a9c0d8caf0f534ea/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}