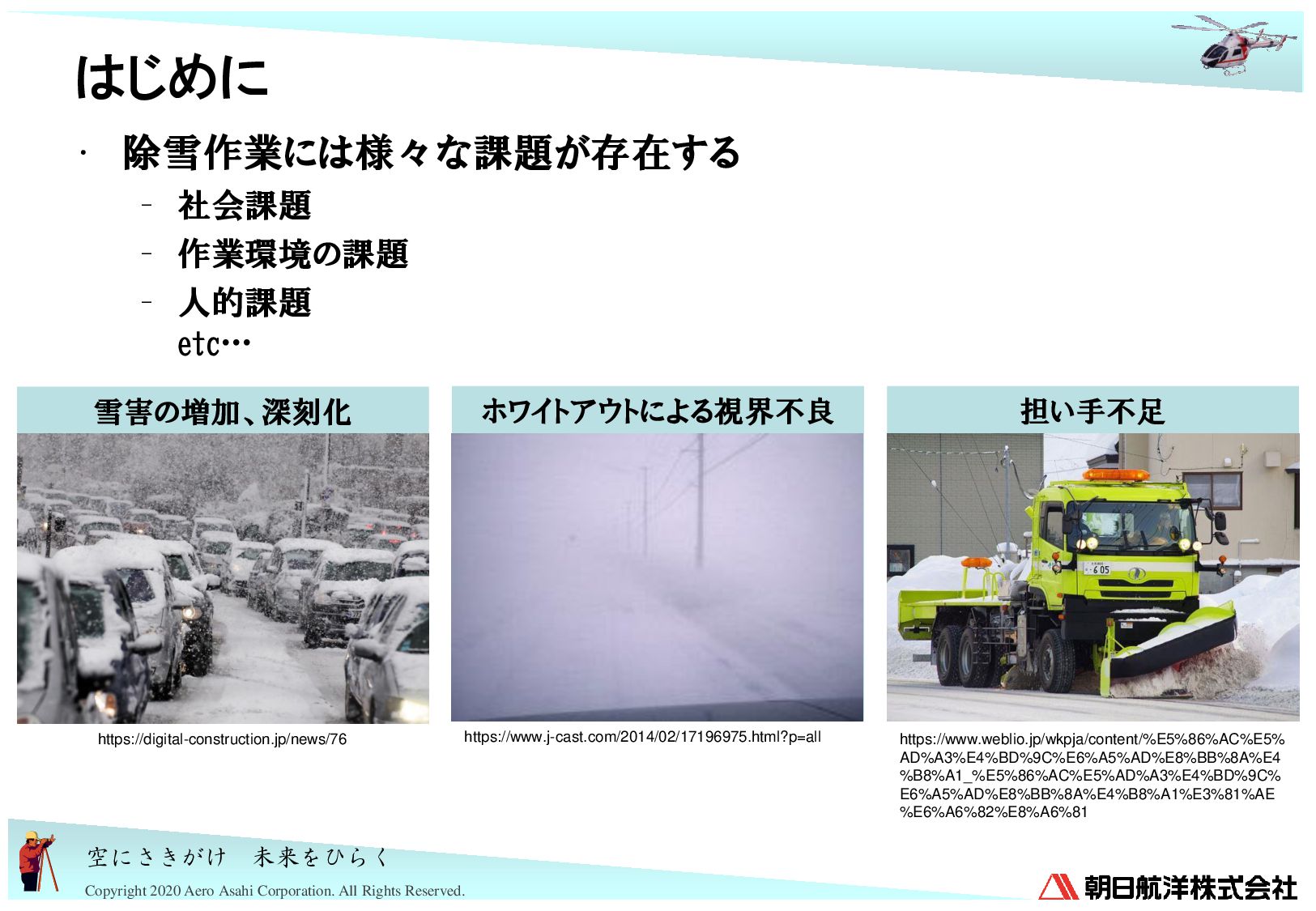
近年、人口減少や高齢化などに伴い除雪作業の担い手不足が深刻な社会問題となっています。とりわけ、除雪車を用いた除雪作業には一定以上の熟練度が必要となるため、オペレーターの育成や作業を支援するシステムの開発が課題になっています。
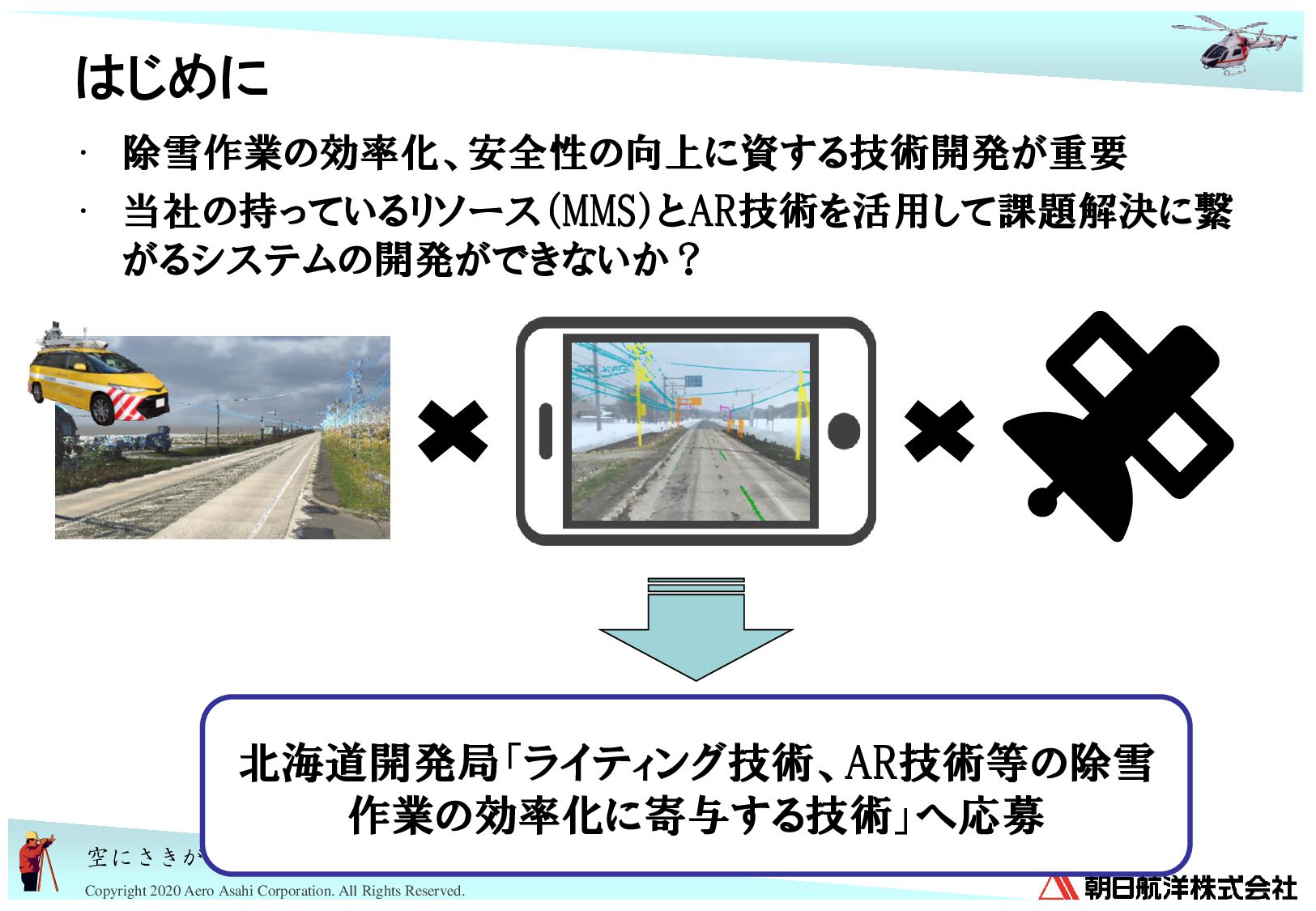
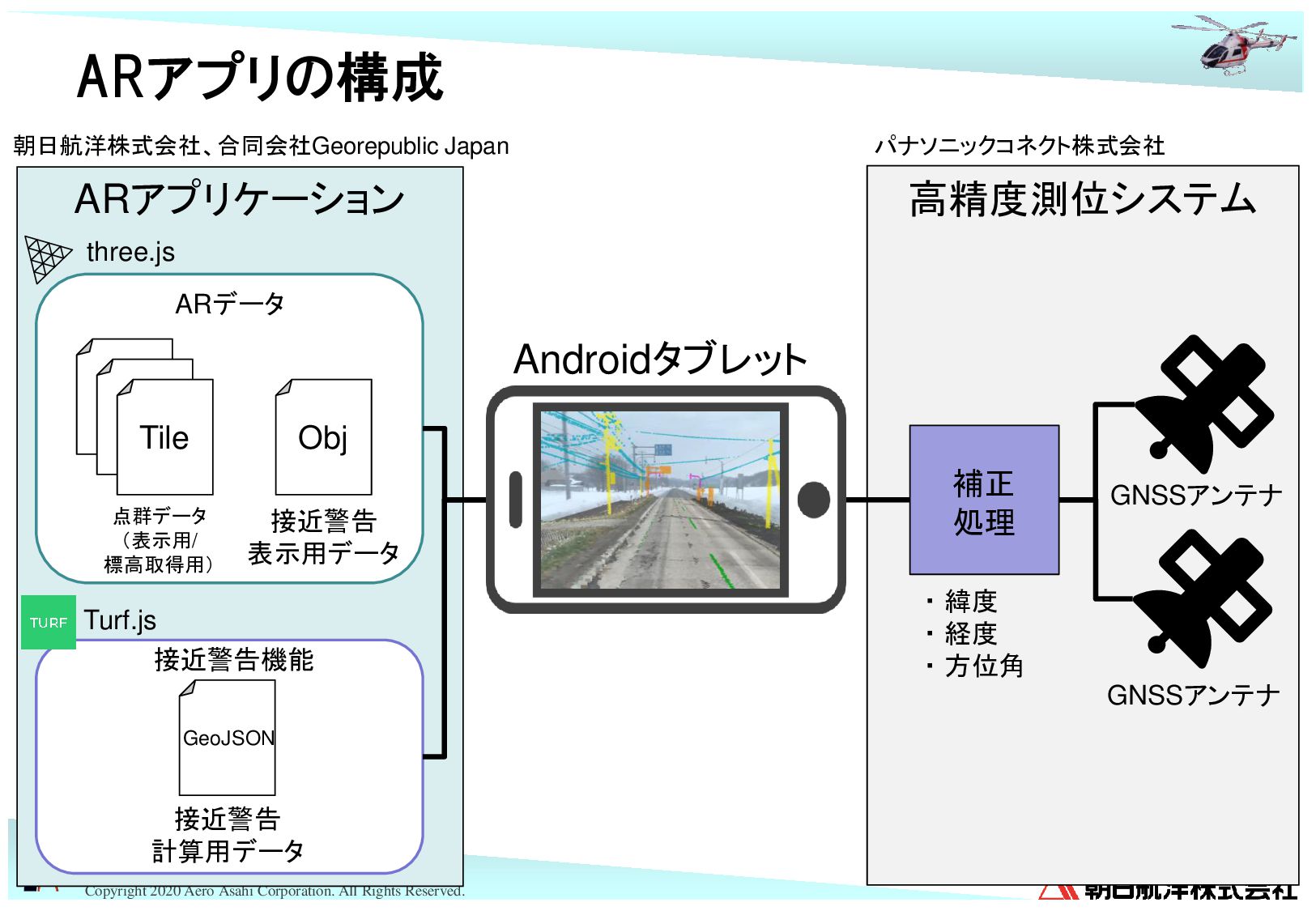
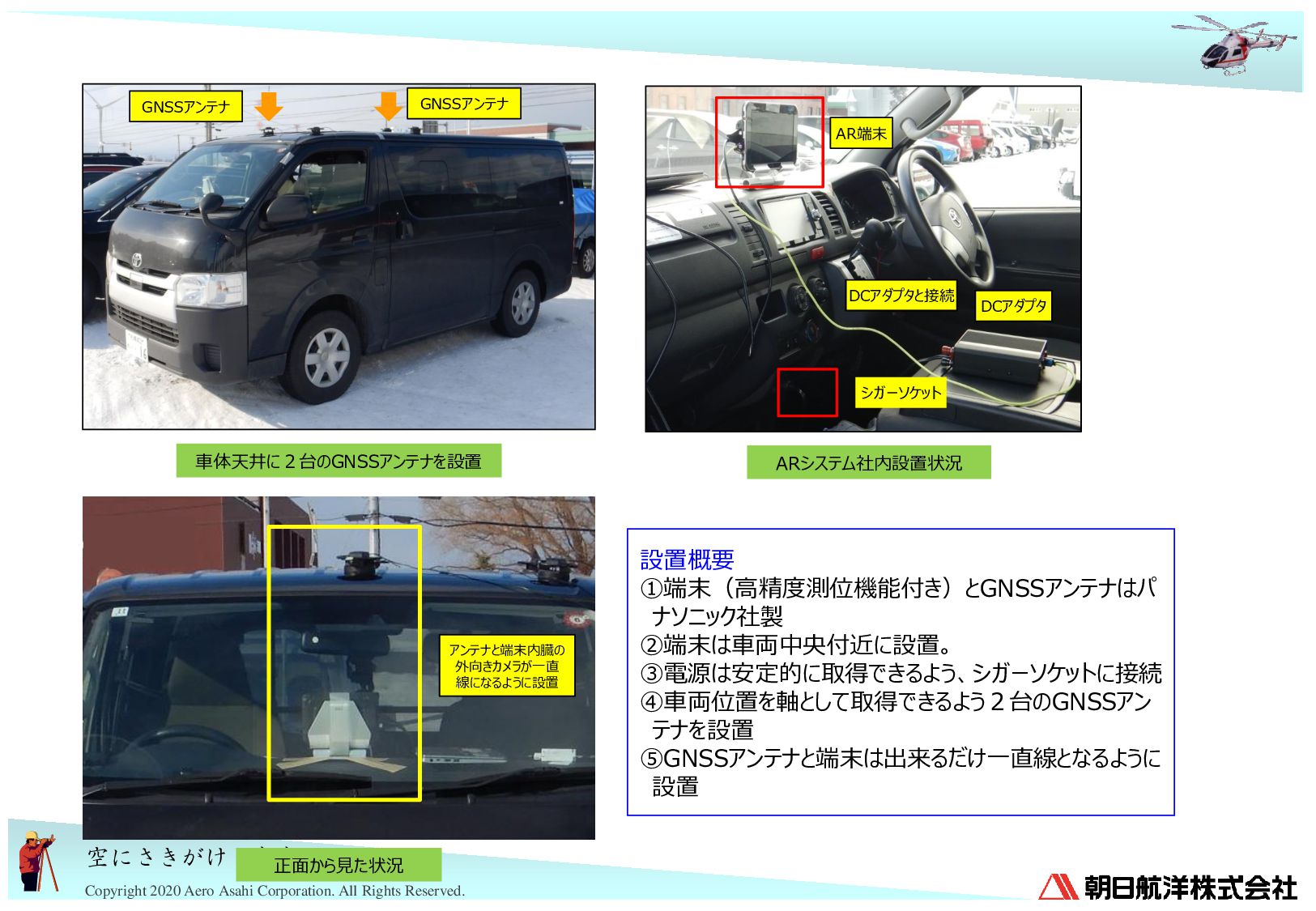
これらの課題を解決するため、移動体に対応可能なThree.jsを活用したARアプリとRTK技術による高精度測位システム(パナソニックコネクト社)を融合し、除雪作業支援向けARガイダンスシステムを開発しました。
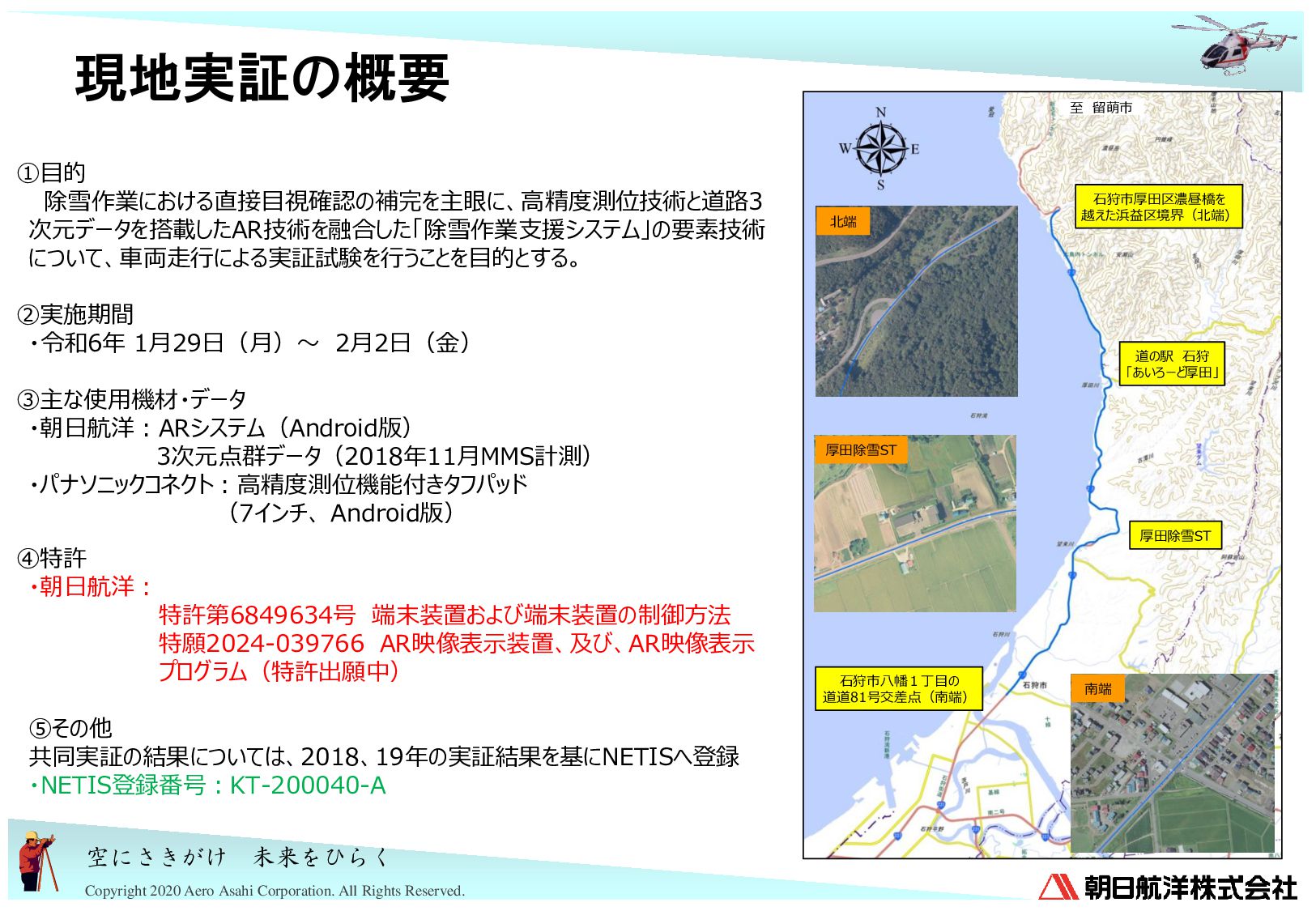
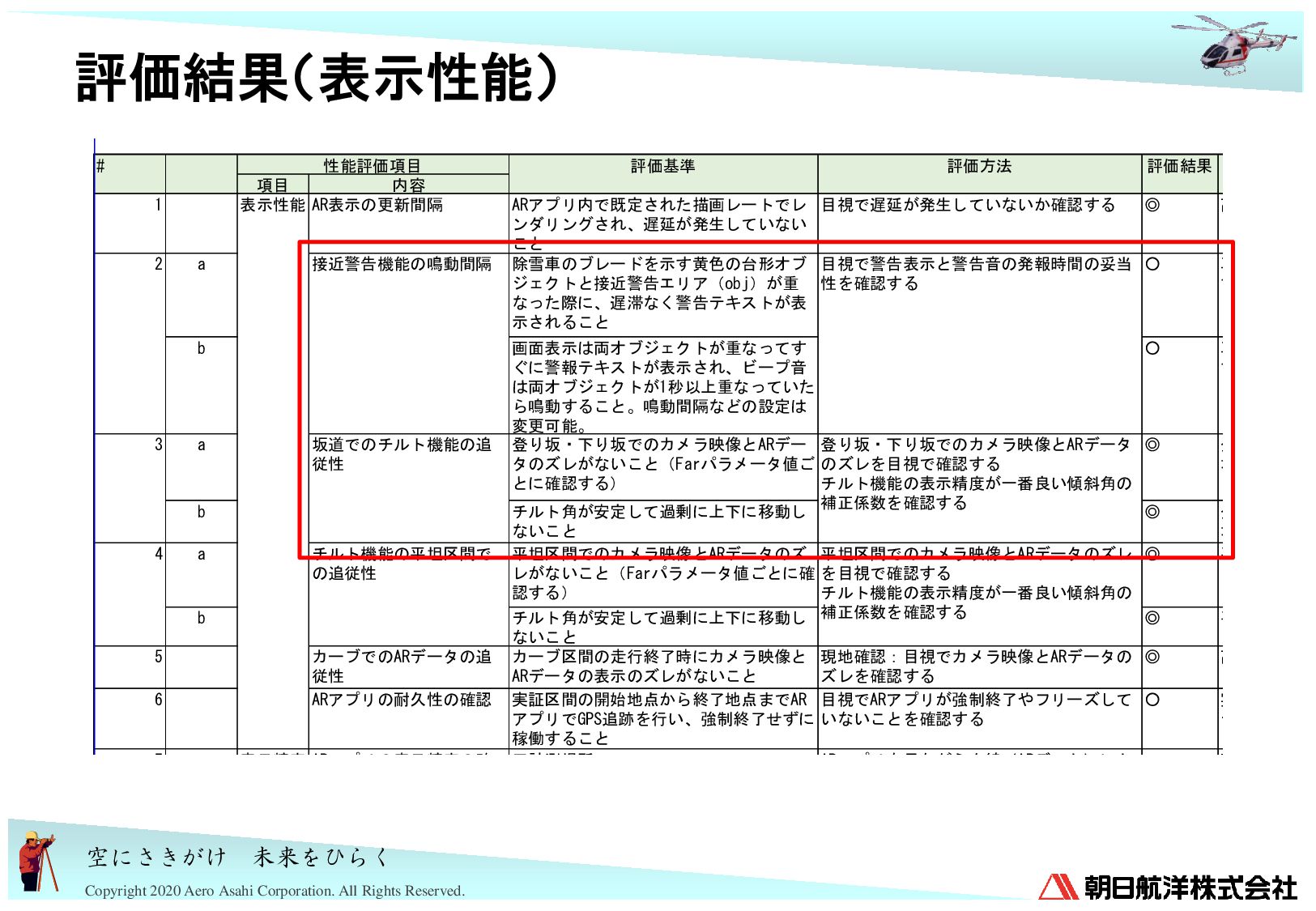
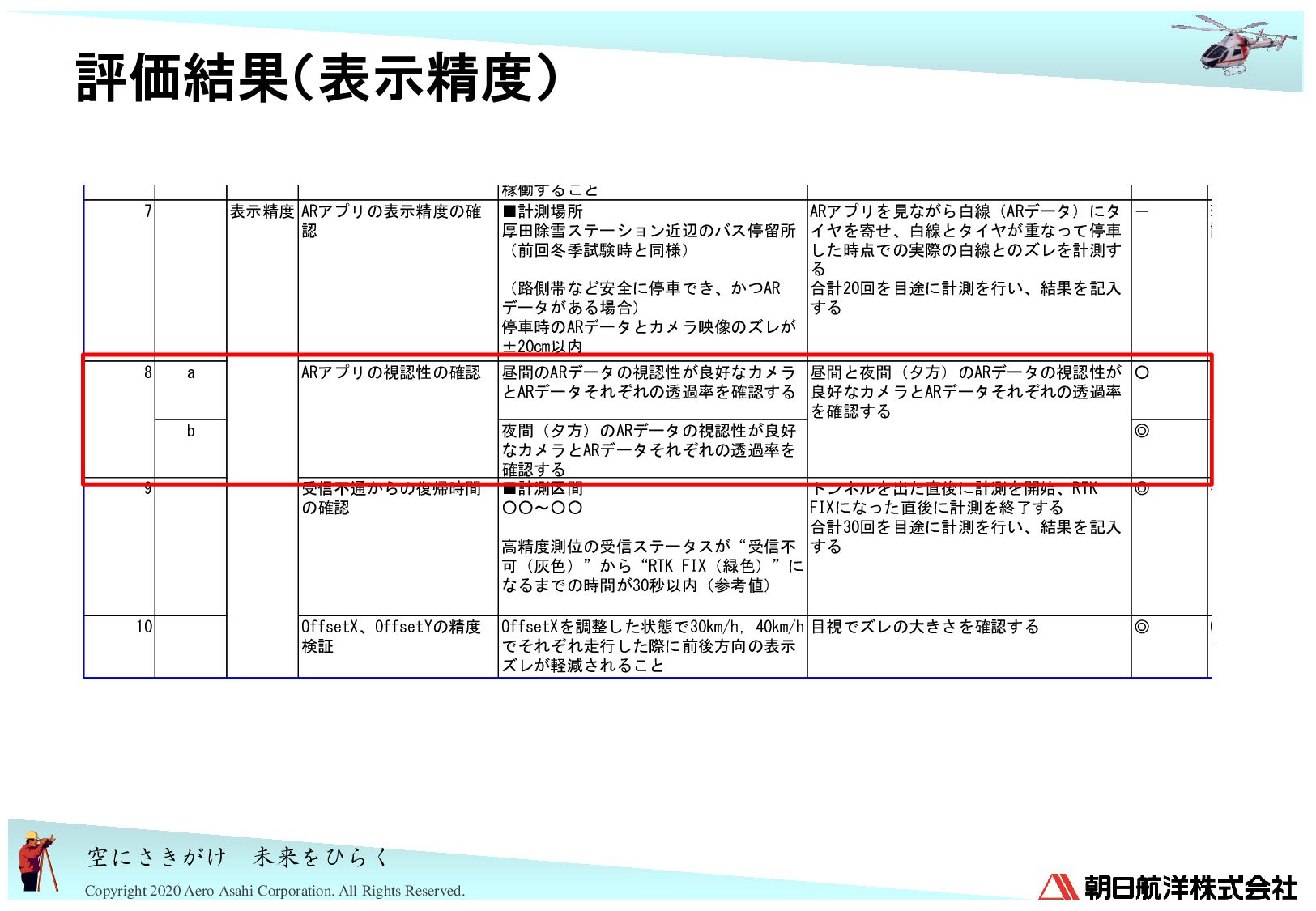
本発表では、ARガイダンスシステムの構成と積雪地域における実証結果をご紹介いたします。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}