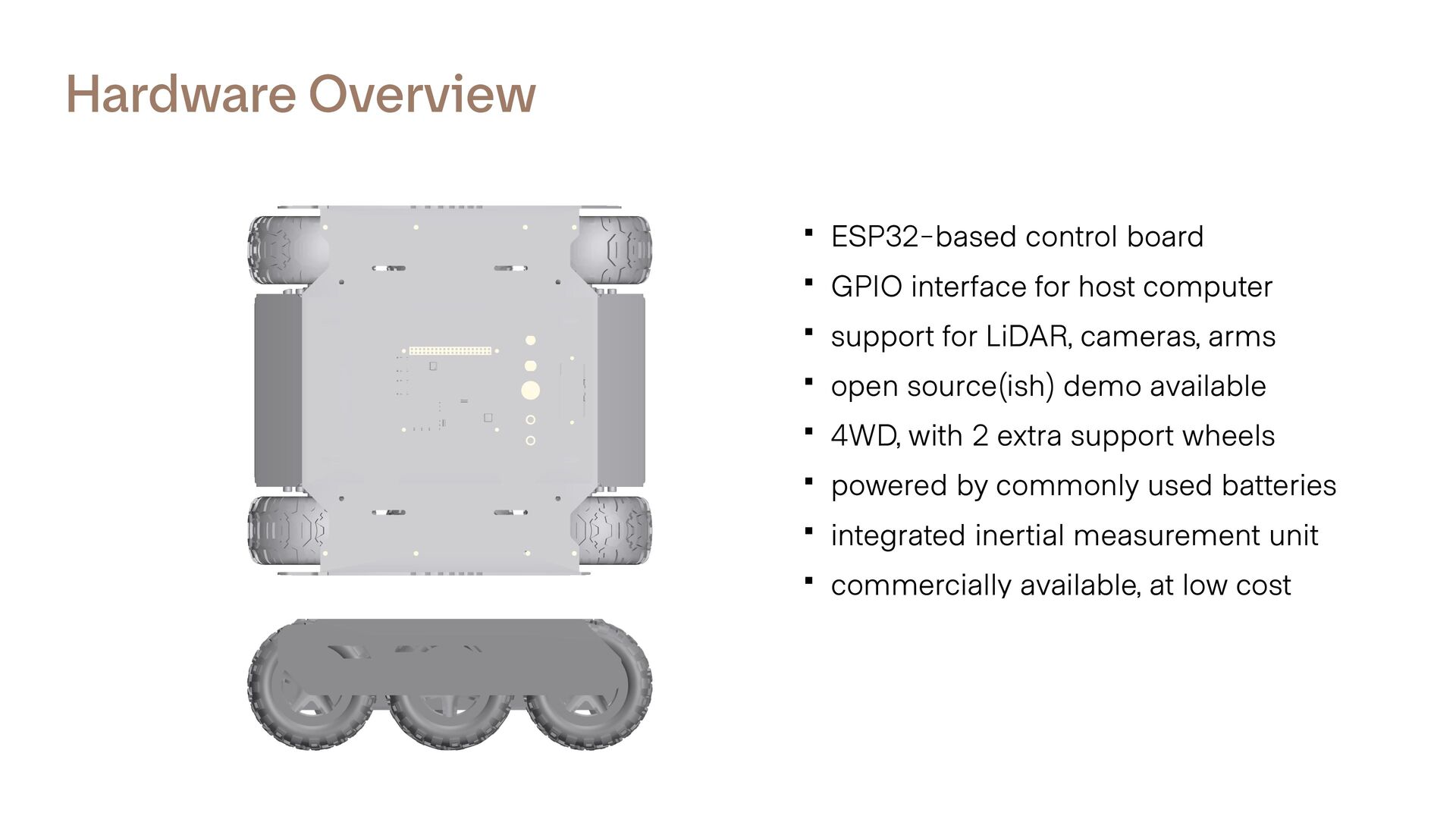
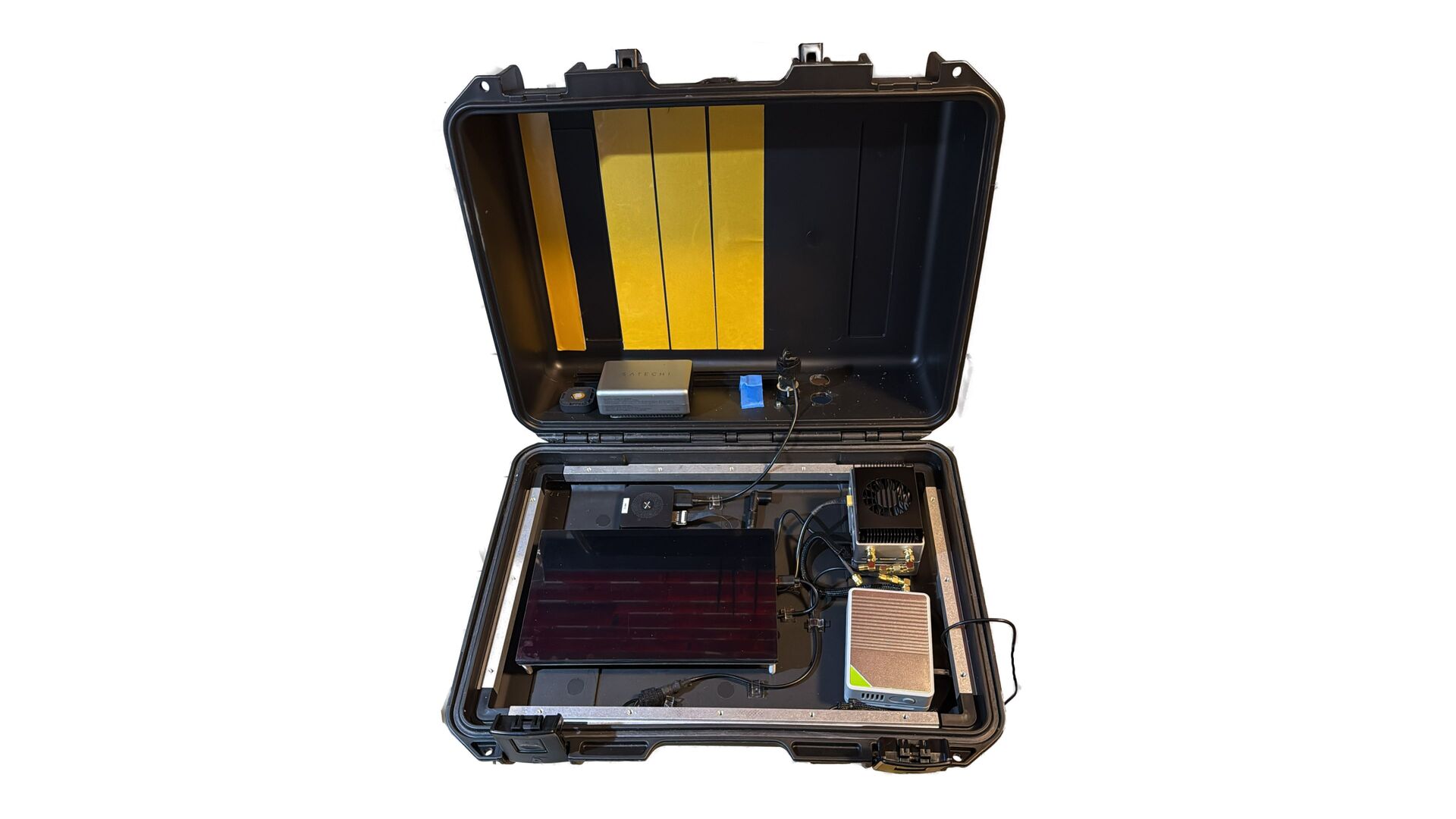
host computer ▪ support for LiDAR, cameras, arms ▪ open source(ish) demo available ▪ 4WD, with 2 extra support wheels ▪ powered by commonly used batteries ▪ integrated inertial measurement unit ▪ commercially available, at low cost
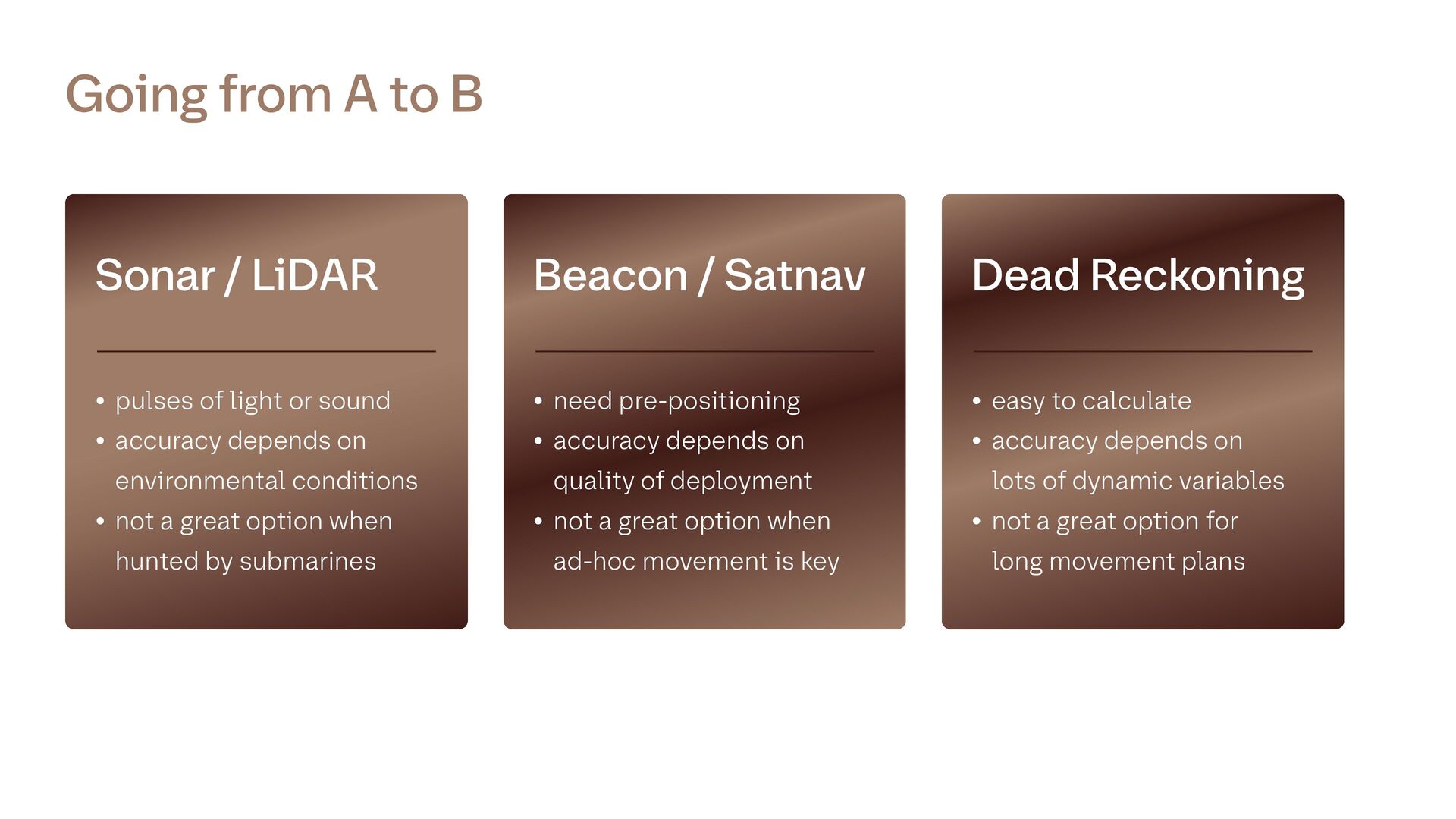
environmental conditions • not a great option when hunted by submarines Sonar / LiDAR • need pre-positioning • accuracy depends on quality of deployment • not a great option when ad-hoc movement is key Beacon / Satnav • easy to calculate • accuracy depends on lots of dynamic variables • not a great option for long movement plans Dead Reckoning Going from A to B
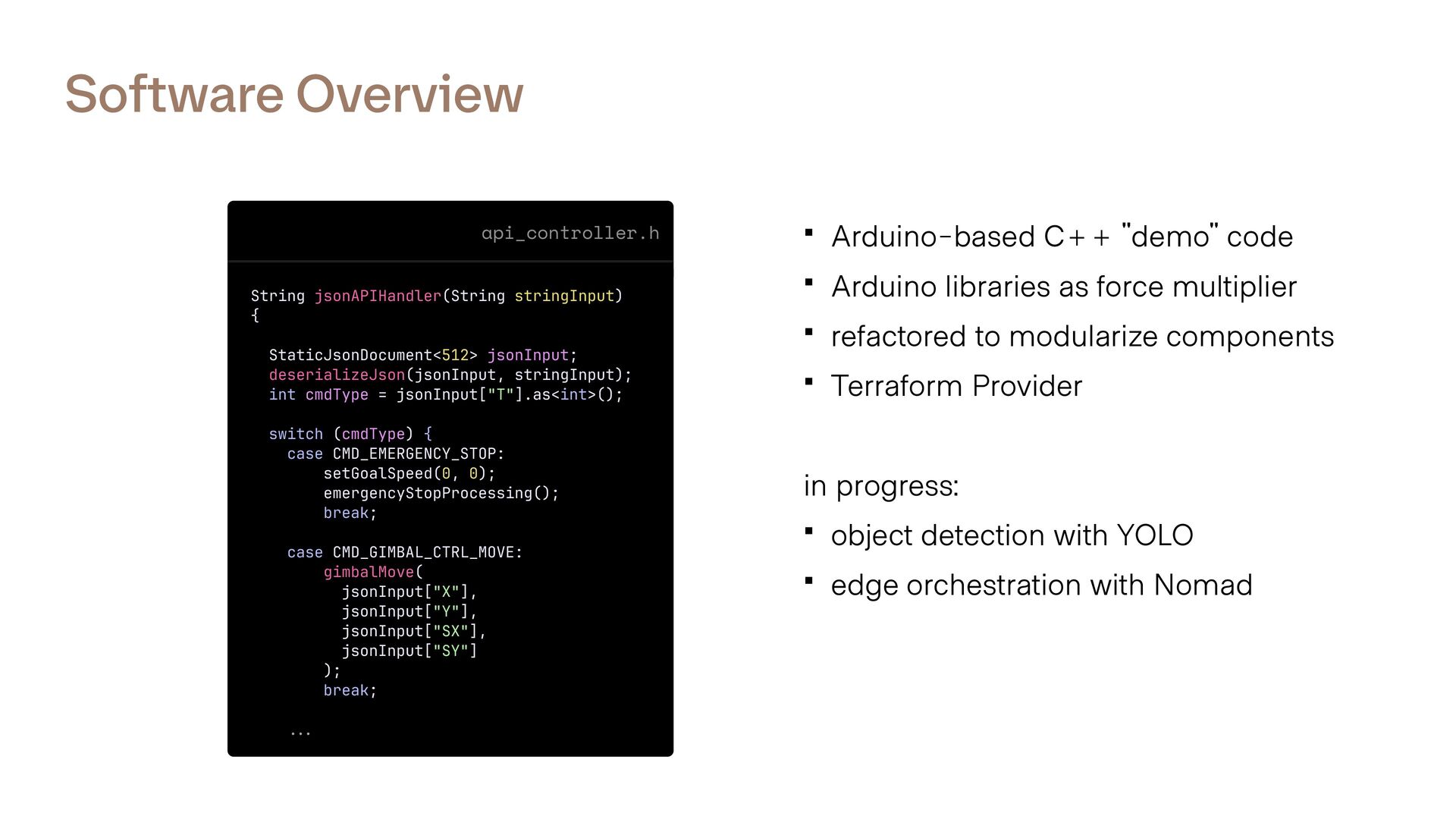
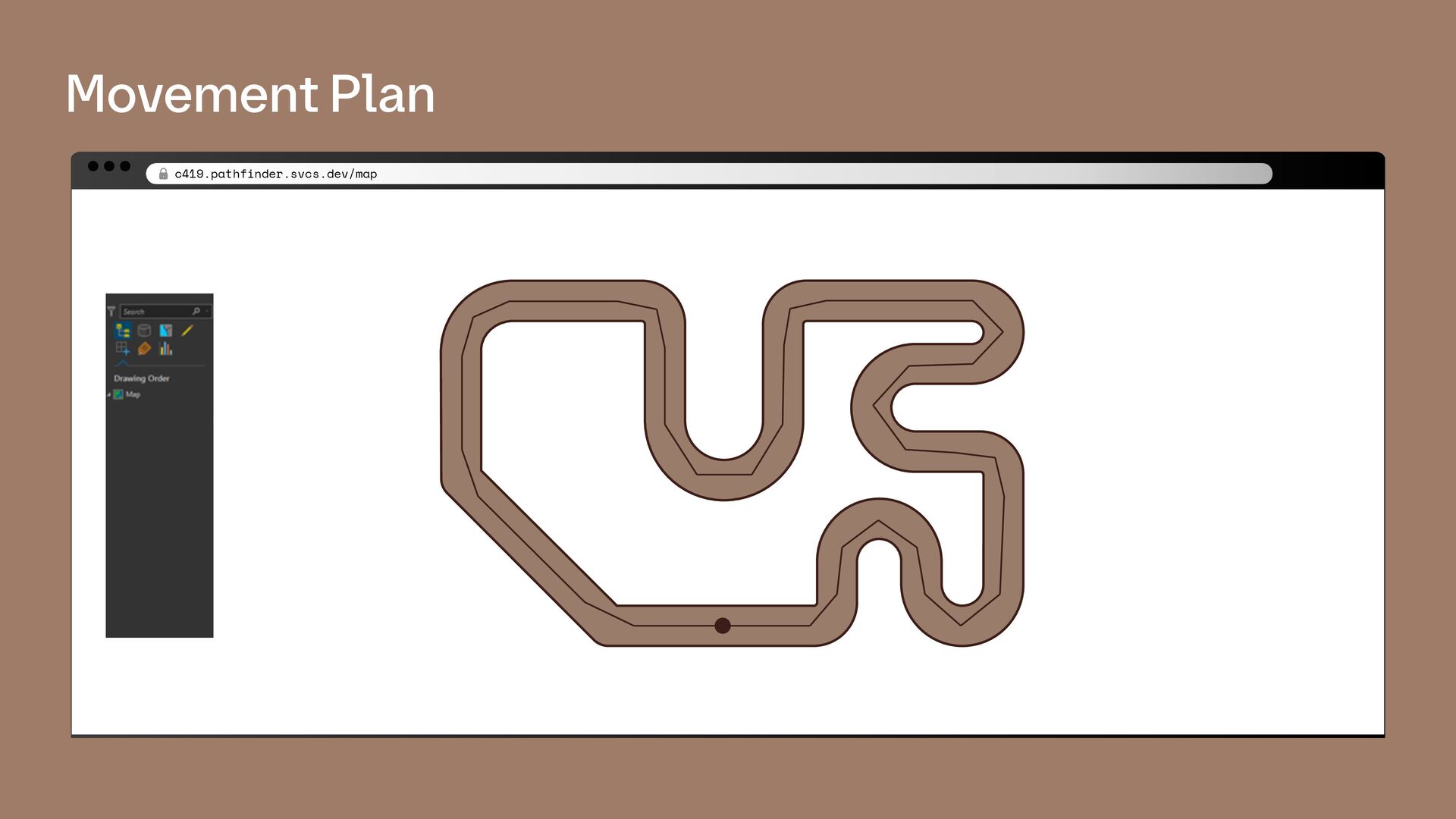
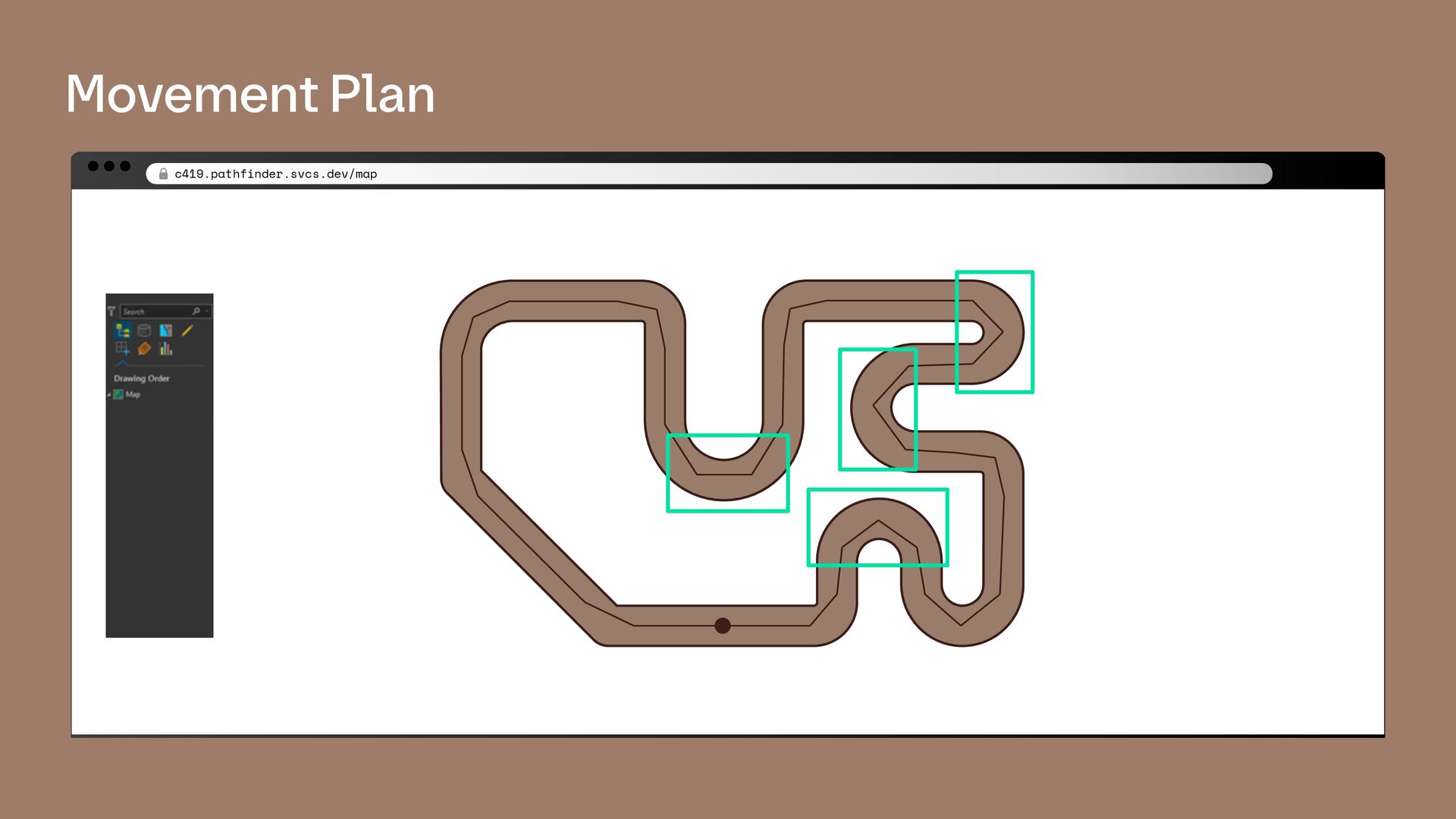
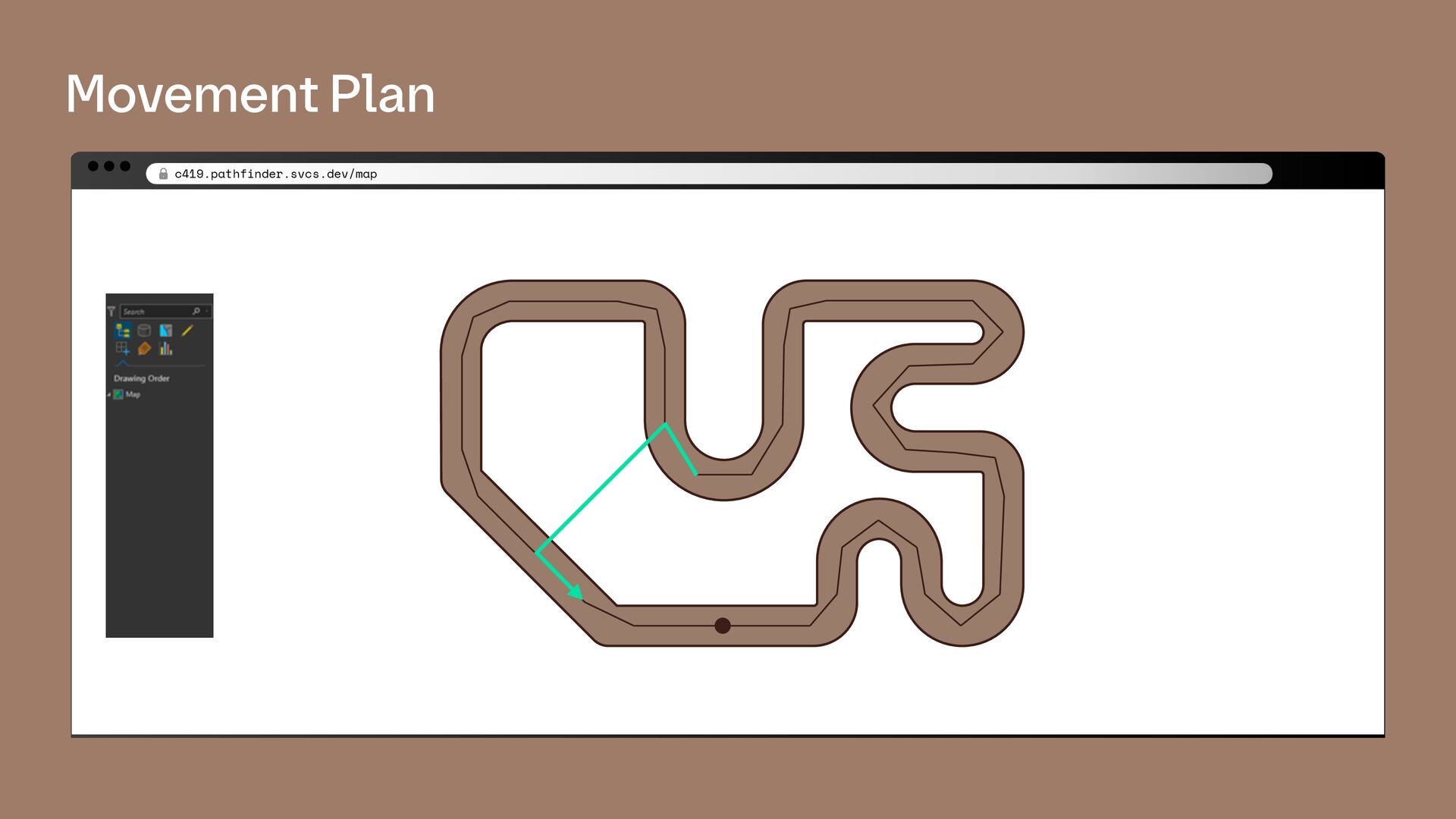
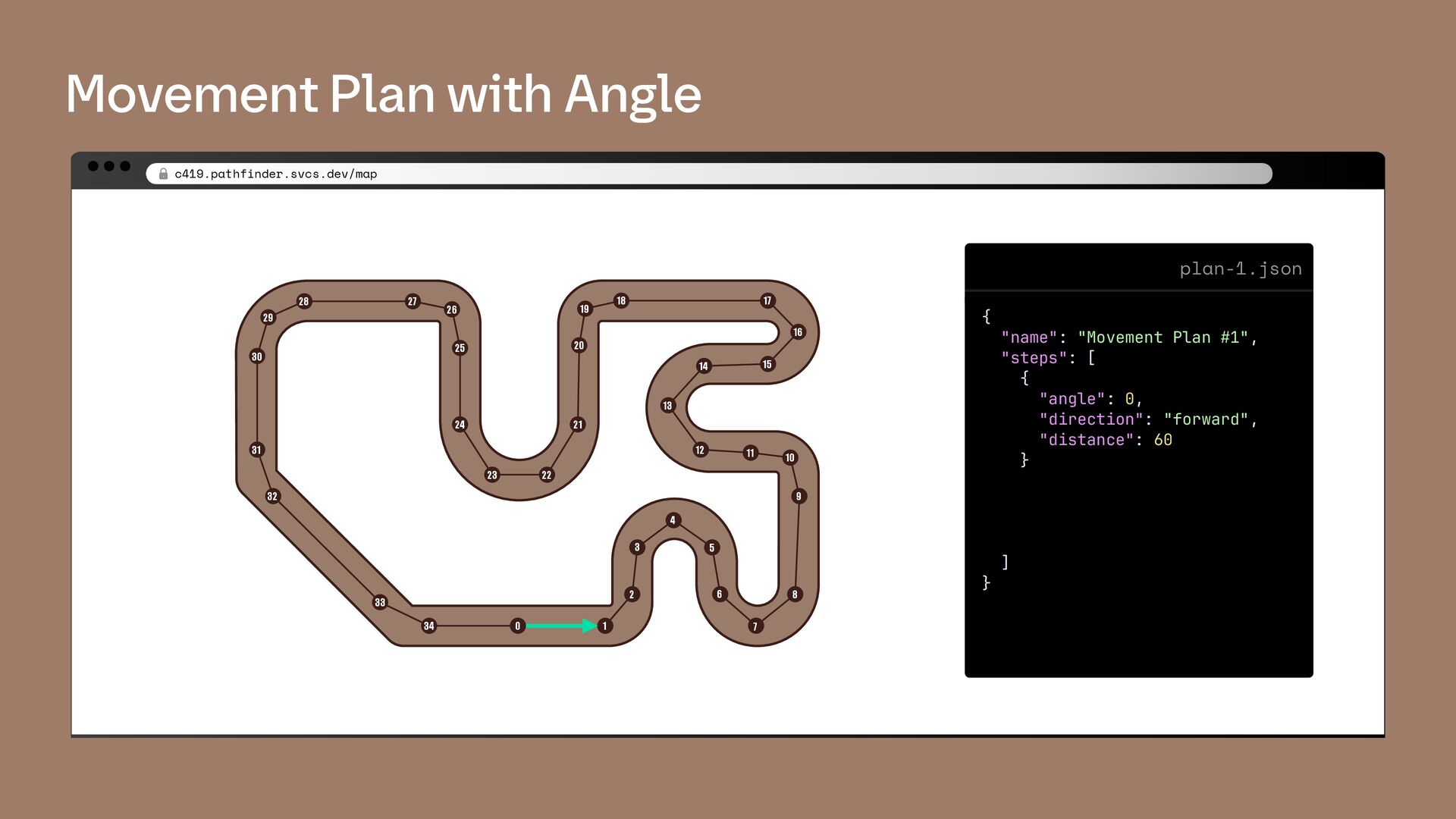
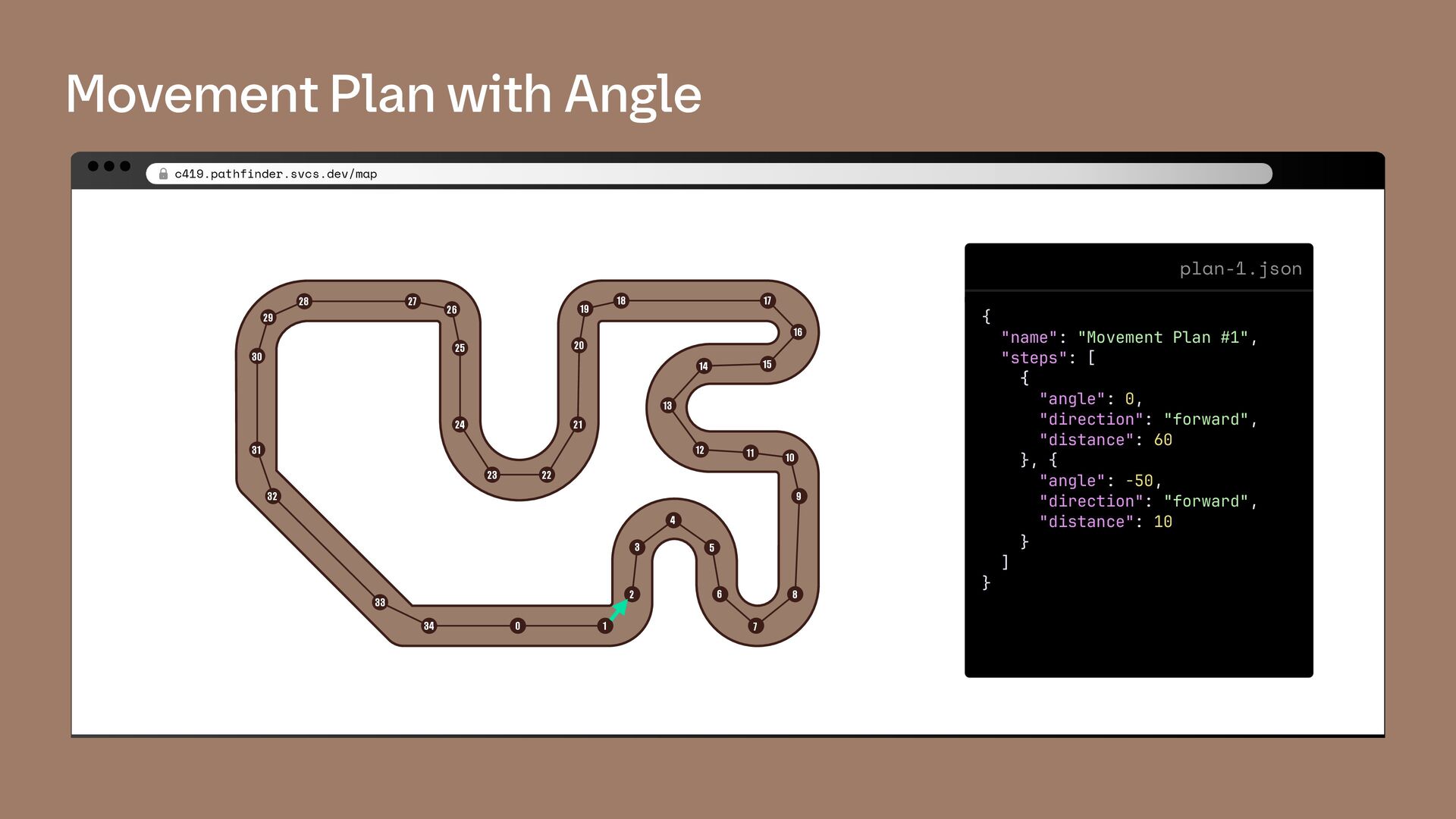
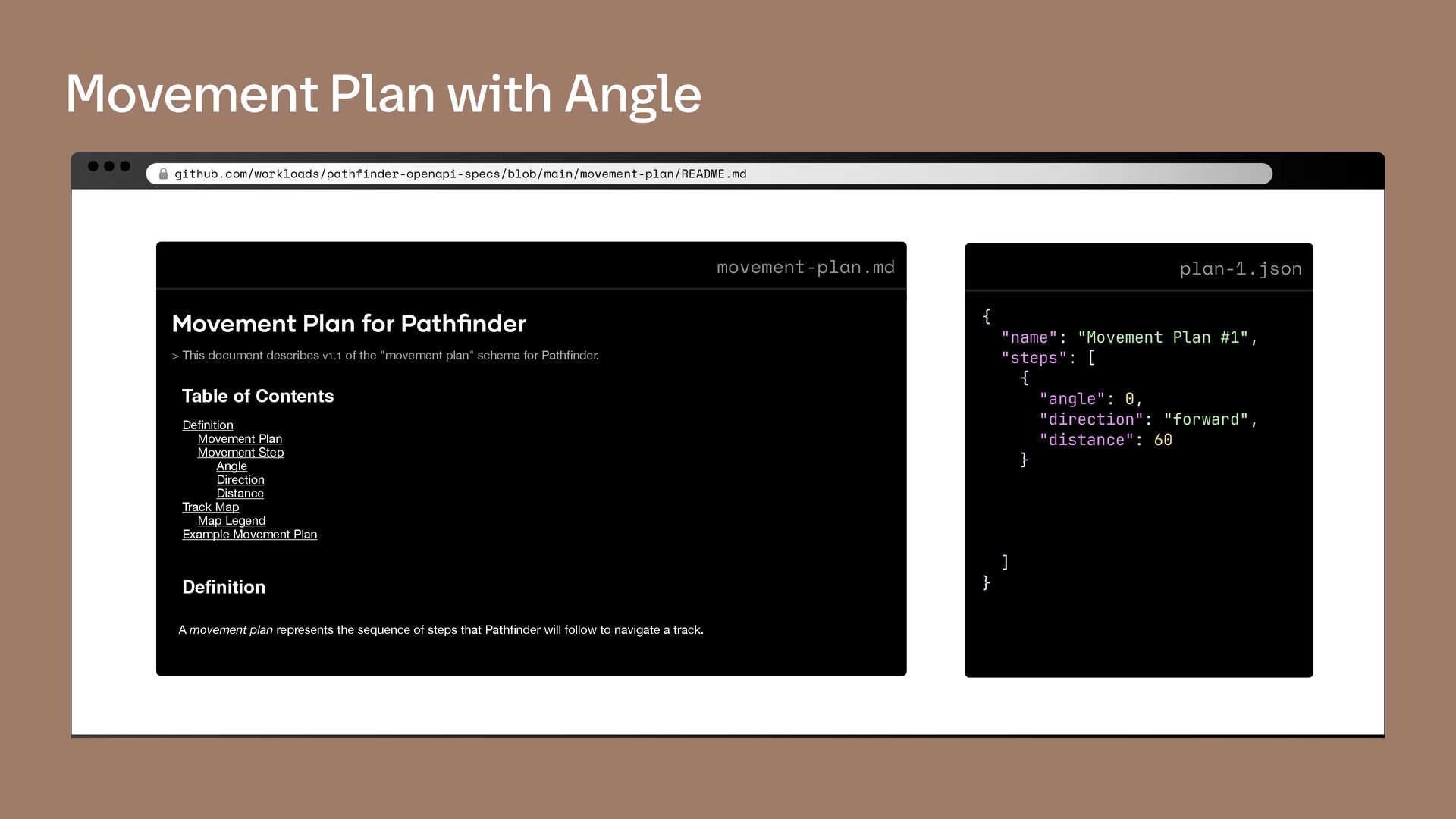
6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0 plan-1.json { "name": "Movement Plan #1", "steps": [ { "angle": 0, "direction": "forward", "distance": 60 } ] } movement-plan.md Movement Plan for Pathfinder > This document describes v1.1 of the "movement plan" schema for Pathfinder. Table of Contents Definition Movement Plan Movement Step Angle Direction Distance Track Map Map Legend Example Movement Plan Definition A movement plan represents the sequence of steps that Pathfinder will follow to navigate a track.
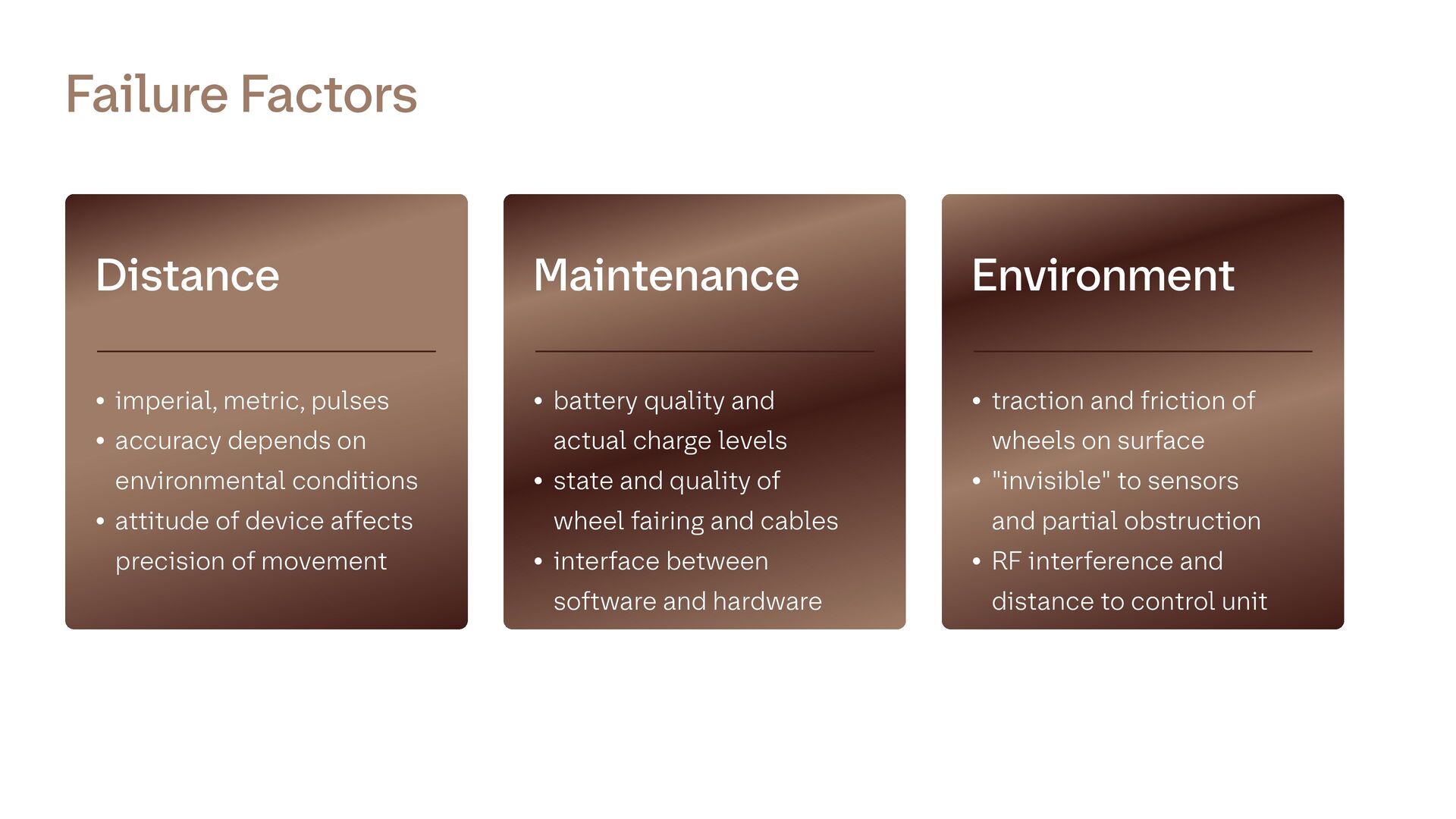
• attitude of device affects precision of movement Distance • battery quality and actual charge levels • state and quality of wheel fairing and cables • interface between software and hardware Maintenance • traction and friction of wheels on surface • "invisible" to sensors and partial obstruction • RF interference and distance to control unit Environment Failure Factors
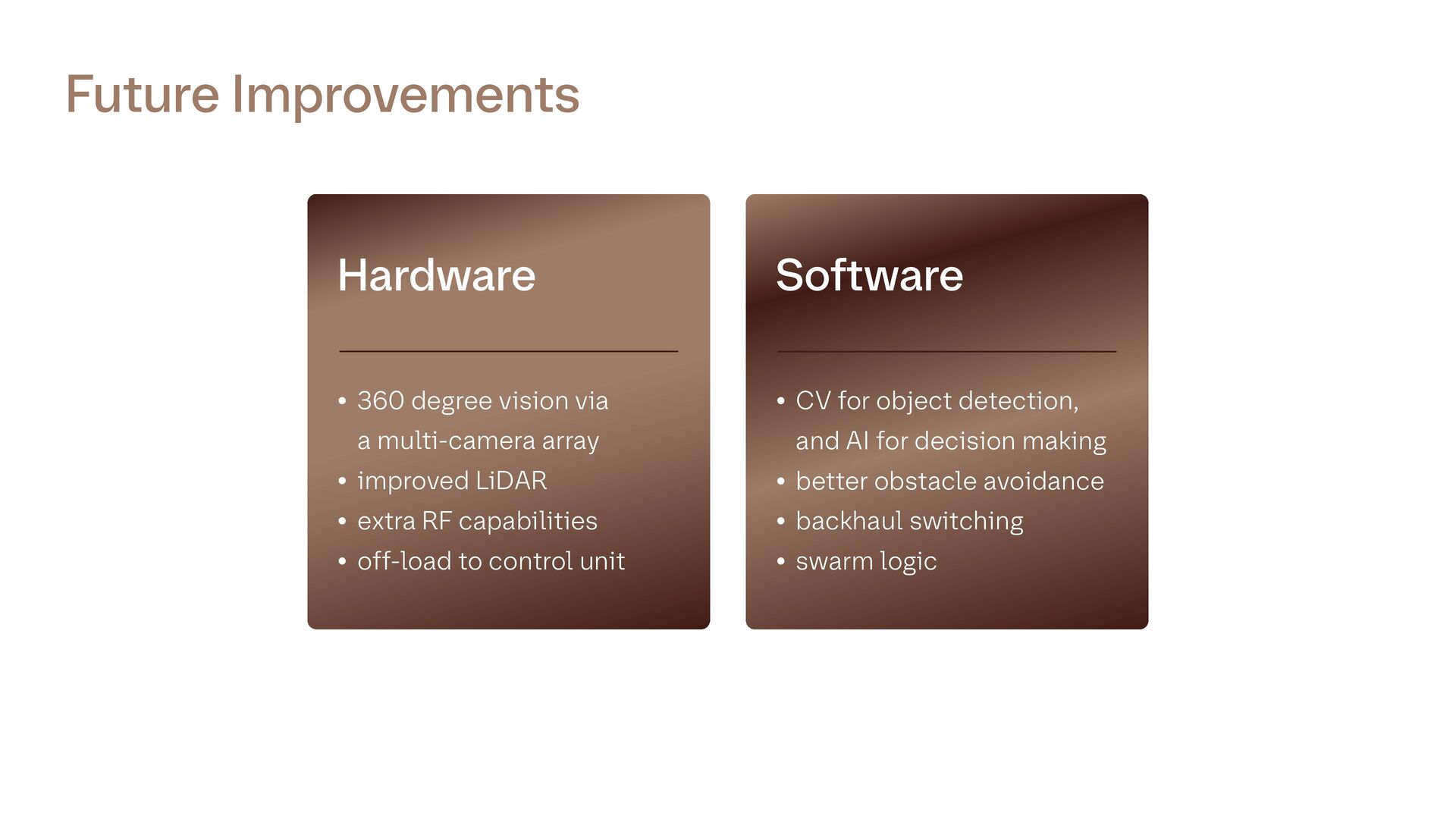
• improved LiDAR • extra RF capabilities • off-load to control unit Hardware • CV for object detection, and AI for decision making • better obstacle avoidance • backhaul switching • swarm logic Software
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}