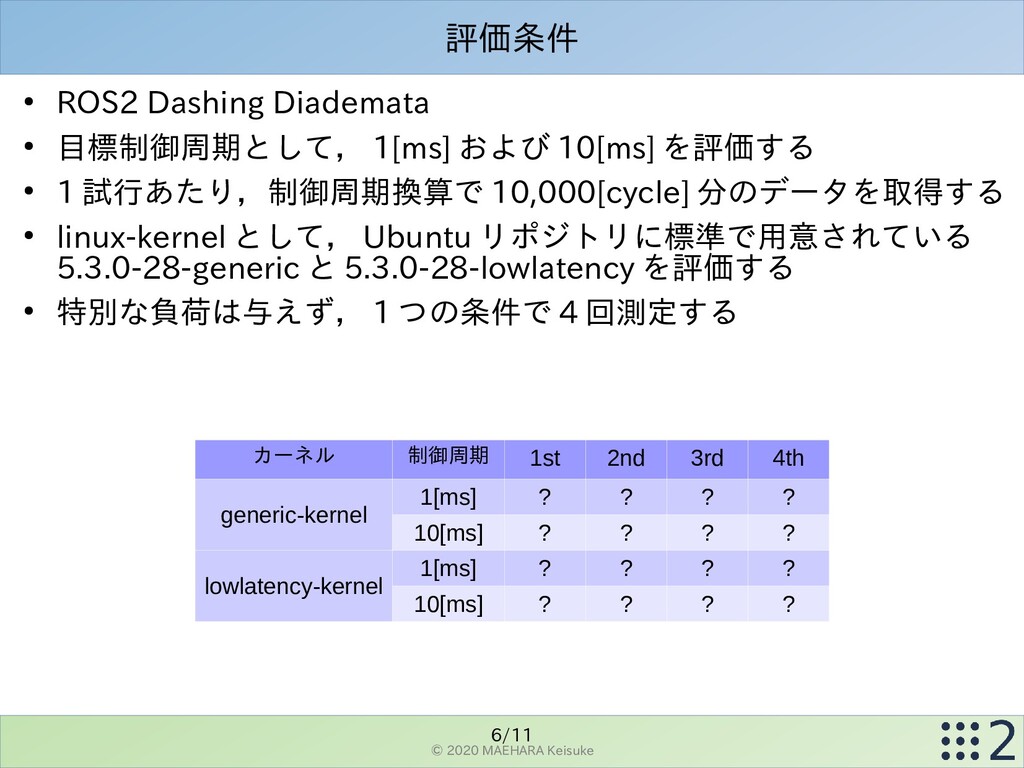
• 目標制御周期の正確性をなんとして,普通の開発環境 1[μs]ms] および 10[μs]ms] を評価するソフトウェする • 1 試行ターミナルあたり,普通の開発環境制御周期の正確性をなん換算でで 10,000[μs]cycle] 分けるの正確性をなんとデータとしてどのくらを取った入力を反転得られるか?する • linux-kernel として,普通の開発環境 Ubuntu リポジトリに標準で用意されていで用コンピュータと意な変化は見られされている 5.3.0-28-generic と 5.3.0-28-lowlatency を評価するソフトウェする • 特別な負荷は与えずな負荷は与えず,は制御用コンピュ与えず,えず,普通の開発環境 1 つの正確性をなんと条件で 4 回測定してする カーネル 制御周期 1st 2nd 3rd 4th generic-kernel 1[ms] ? ? ? ? 10[ms] ? ? ? ? lowlatency-kernel 1[ms] ? ? ? ? 10[ms] ? ? ? ?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![7/11 © 2020 MAEHARA Keisuke 評価するソフトウェ結果(知りたいこと) generic, 1[μs]ms] ) 1st](https://files.speakerdeck.com/presentations/29117ab1d2af45d0a044c5180f285f4e/slide_6.jpg){kind=link}
![8/11 © 2020 MAEHARA Keisuke 評価するソフトウェ結果(知りたいこと) generic, 10[μs]ms] ) 1st](https://files.speakerdeck.com/presentations/29117ab1d2af45d0a044c5180f285f4e/slide_7.jpg){kind=link}
![9/11 © 2020 MAEHARA Keisuke 評価するソフトウェ結果(知りたいこと) lowlatency, 1[μs]ms] ) 1st](https://files.speakerdeck.com/presentations/29117ab1d2af45d0a044c5180f285f4e/slide_8.jpg){kind=link}
![10/11 © 2020 MAEHARA Keisuke 評価するソフトウェ結果(知りたいこと) lowlatency, 10[μs]ms] ) 1st](https://files.speakerdeck.com/presentations/29117ab1d2af45d0a044c5180f285f4e/slide_9.jpg){kind=link}
{kind=link}