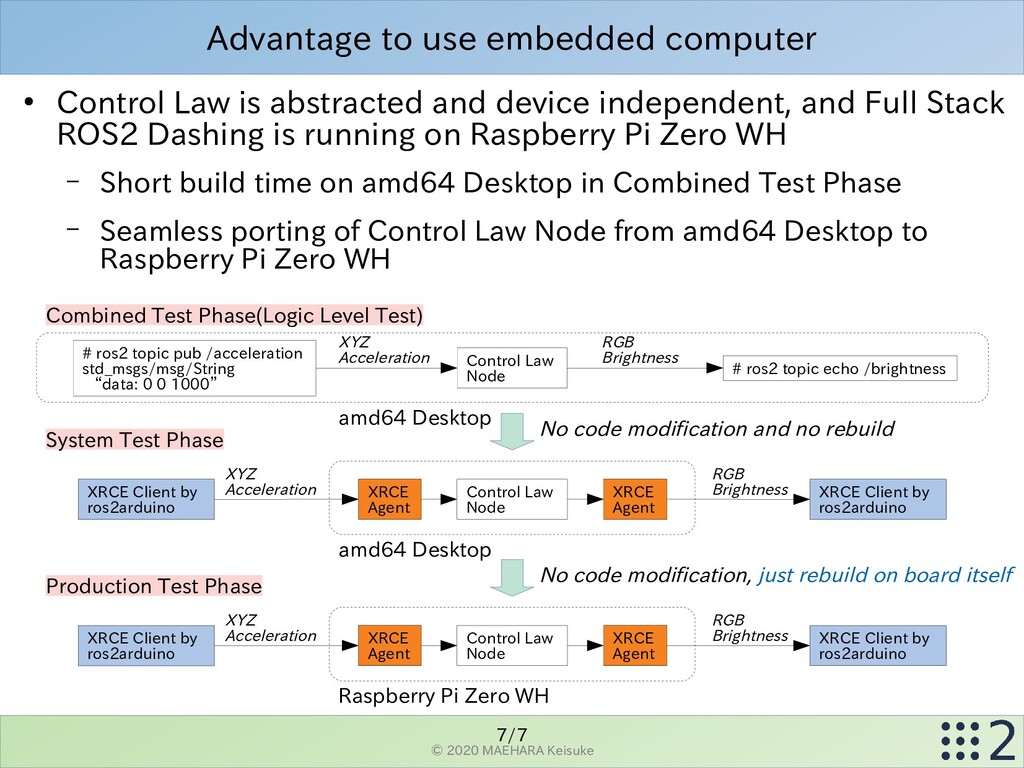
• Control Law is abstracted and device independent, and Full Stack ROS2 Dashing is running on Raspberry Pi Zero WH – Short build time on amd64 Desktop in Combined Test Phase – Seamless porting of Control Law Node from amd64 Desktop to Raspberry Pi Zero WH Control Law Node # ros2 topic pub /acceleration std_msgs/msg/String “data: 0 0 1000” # ros2 topic echo /brightness Combined Test Phase(Logic Level Test) System Test Phase XYZ Acceleration RGB Brightness XRCE Agent XRCE Agent Control Law Node XRCE Client by ros2arduino XRCE Client by ros2arduino XYZ Acceleration RGB Brightness amd64 Desktop amd64 Desktop Production Test Phase XYZ Acceleration RGB Brightness XRCE Agent XRCE Agent Control Law Node XRCE Client by ros2arduino XRCE Client by ros2arduino Raspberry Pi Zero WH No code modification and no rebuild No code modification, just rebuild on board itself
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}