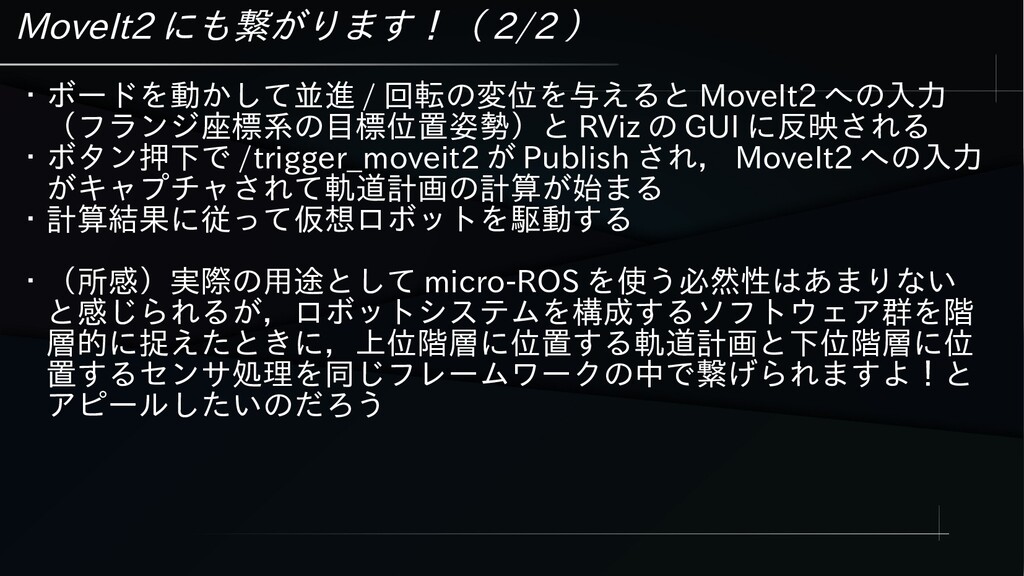
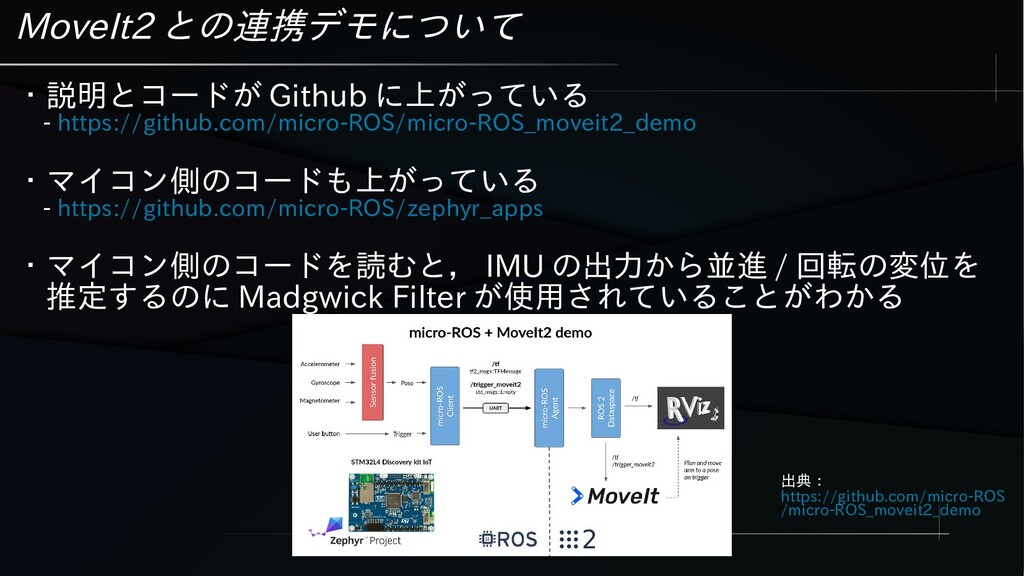
RViz の GUI に反映される ・ボタン押下で /trigger_moveit2 が Publish され, MoveIt2 への入力 がキャプチャされて軌道計画の計算が始まる ・計算結果に従って仮想ロボットを駆動する ・(所感)実際の用途として micro-ROS を使う必然性はあまりない と感じられるが,ロボットシステムを構成するソフトウェア群を階 層的に捉えたときに,上位階層に位置する軌道計画と下位階層に位 置するセンサ処理を同じフレームワークの中で繋げられますよ!と アピールしたいのだろう
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}