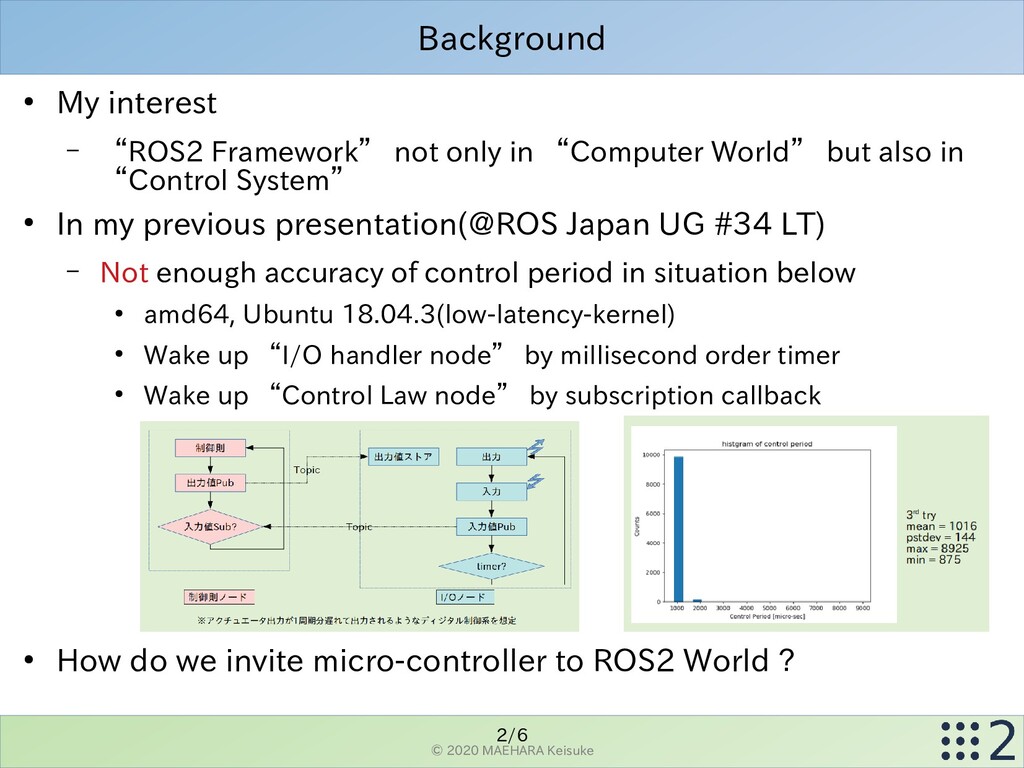
“ROS2 Framework” not only in “Computer World” but also in “Control System” • In my previous presentation(@ROS Japan UG #34 LT) – Not enough accuracy of control period in situation below • amd64, Ubuntu 18.04.3(low-latency-kernel) • Wake up “I/O handler node” by millisecond order timer • Wake up “Control Law node” by subscription callback • How do we invite micro-controller to ROS2 World ?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}