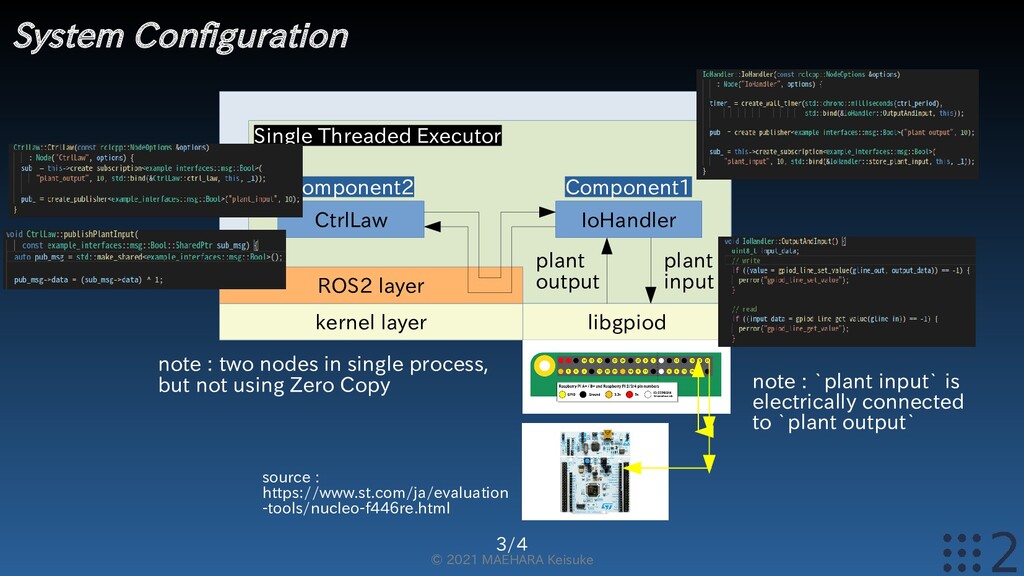
ROS2 layer Single Threaded Executor CtrlLaw IoHandler Component1 Component2 plant input plant output note : two nodes in single process, but not using Zero Copy note : `plant input` is electrically connected to `plant output` source : https://www.st.com/ja/evaluation -tools/nucleo-f446re.html
{kind=link}
{kind=link}
{kind=link}
{kind=link}