• AP:Application Processor o 2〜n個目のCPU • APIC(Advanced Programmable Interrupt Controller) o x86における割り込みコントローラ • Local APIC o CPU内部に実装されていて、外部からの割り込みをコントロールする • IO APIC o I/Oデバイスから受け取った割り込みをCPUにリダイレクトする • IPI(Interprocessor Interrupt) o プロセッサ間の割り込み
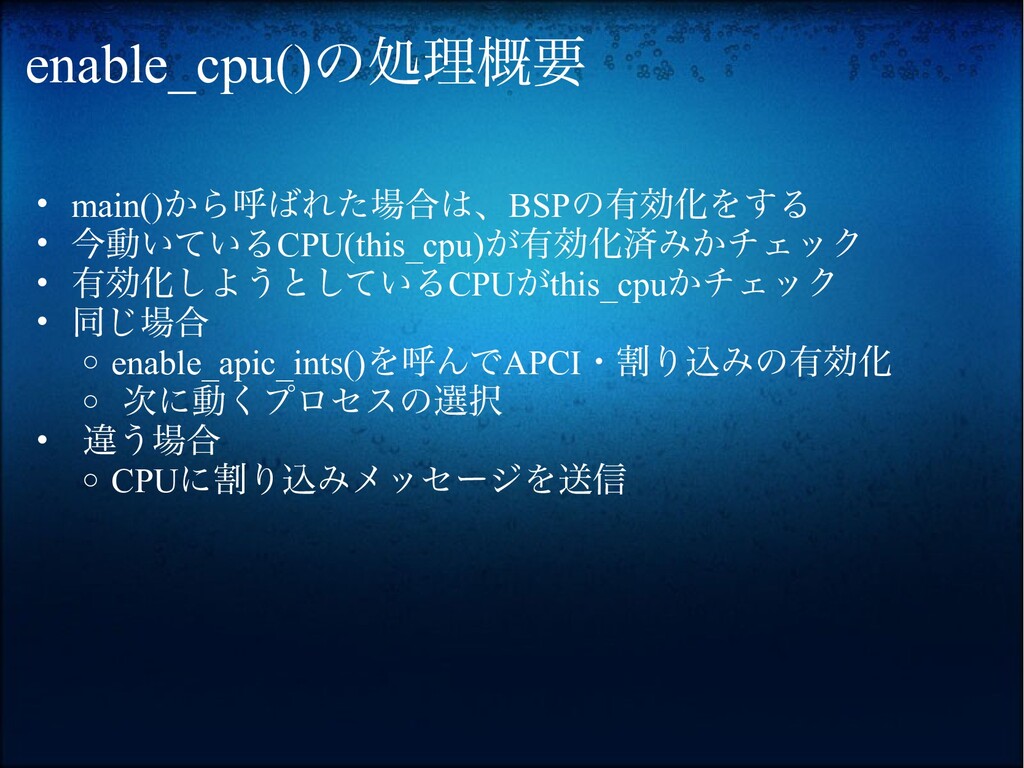
(cpu_available[cpu]==CPU_ENABLED) return; /* A CPU only can only enable its own APIC */ if (cpu==this_cpu) { enable_apic_ints(); cpu_available[cpu]=CPU_ENABLED; lock_pick_proc(); if (echo) printk("CPU%d enabled\n",cpu); } else { interrupt_cpu(cpu,MP_CM_ENABLE,echo); } }
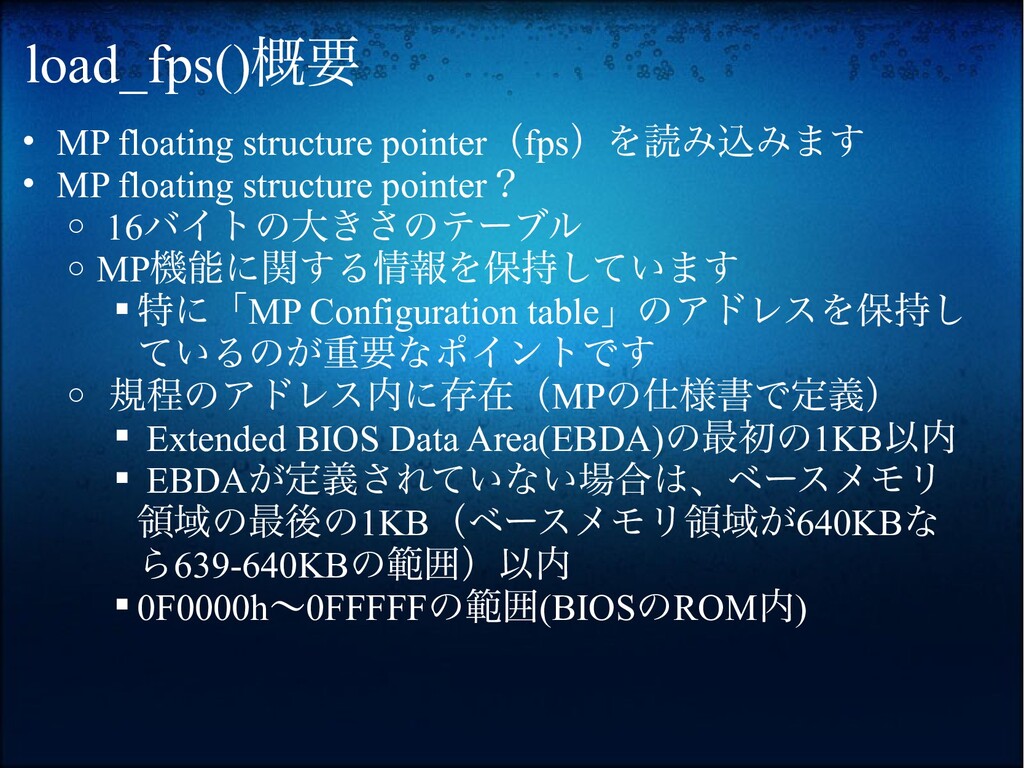
*/ u32_t fp_mp_table; /* address to MP table */ u8_t fp_length; /* FPS size in 16-byte parragraphs */ u8_t fp_version; /* version number: 04h for 1.4 */ u8_t fp_cheksum; /* bytes in FPS must sum 0 */ u8_t fp_sd_config_num; /* standar config number (0 for none) */ u8_t fp_imcrp; /* bit 7 is IMCR present and PIC mode */ char unused[3]; /* last 3 bytes are reserved */ };
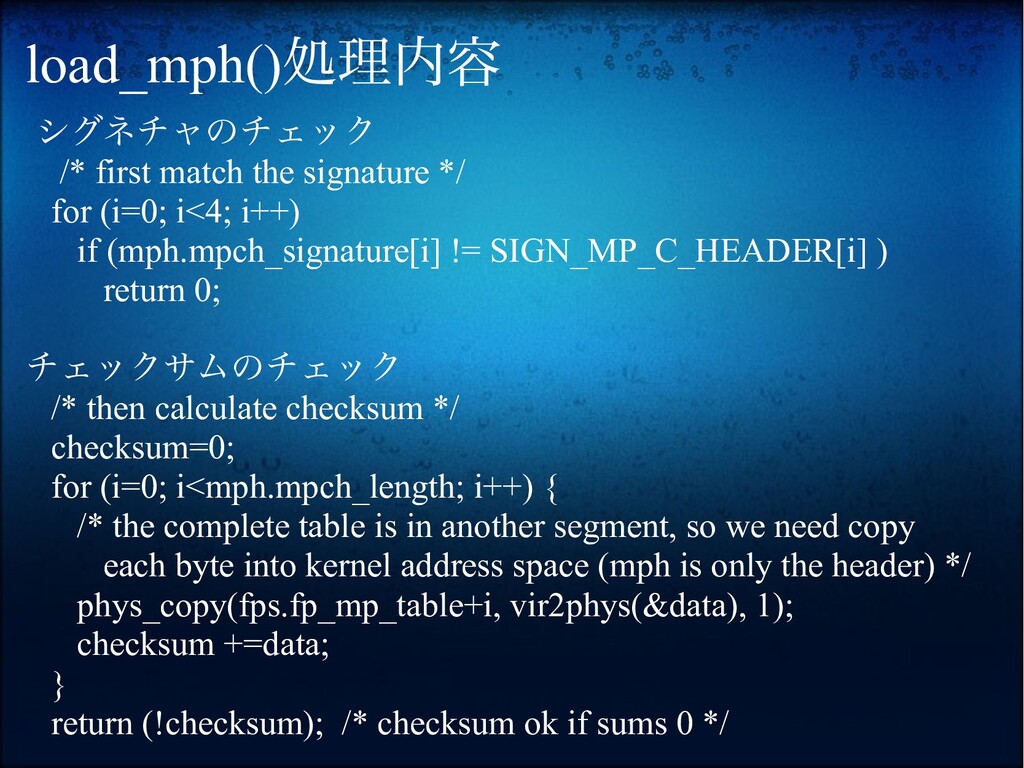
i<4; i++) if (mph.mpch_signature[i] != SIGN_MP_C_HEADER[i] ) return 0; チェックサムのチェック /* then calculate checksum */ checksum=0; for (i=0; i<mph.mpch_length; i++) { /* the complete table is in another segment, so we need copy each byte into kernel address space (mph is only the header) */ phys_copy(fps.fp_mp_table+i, vir2phys(&data), 1); checksum +=data; } return (!checksum); /* checksum ok if sums 0 */
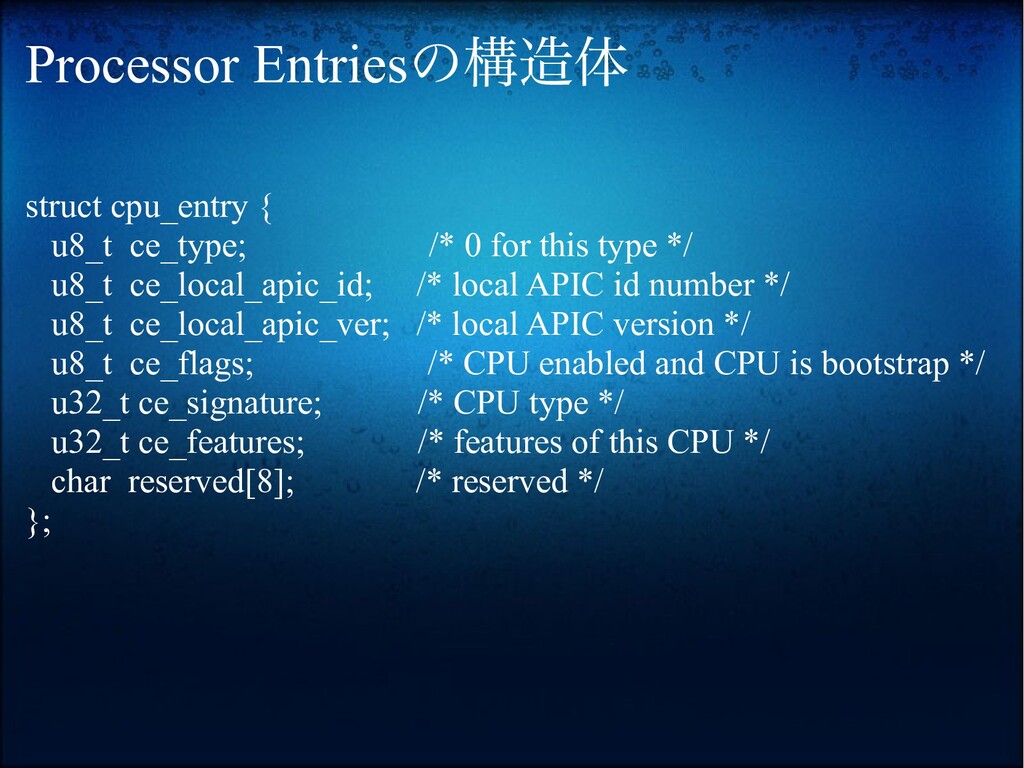
this type */ u8_t ce_local_apic_id; /* local APIC id number */ u8_t ce_local_apic_ver; /* local APIC version */ u8_t ce_flags; /* CPU enabled and CPU is bootstrap */ u32_t ce_signature; /* CPU type */ u32_t ce_features; /* features of this CPU */ char reserved[8]; /* reserved */ };
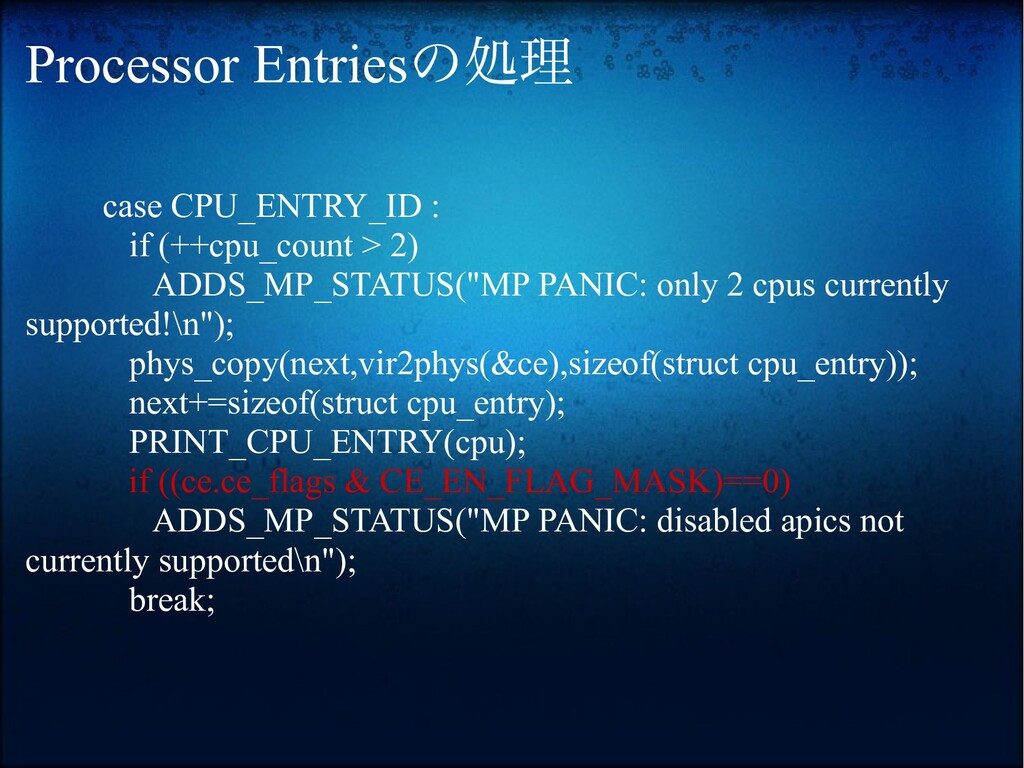
PANIC: only 2 cpus currently supported!\n"); phys_copy(next,vir2phys(&ce),sizeof(struct cpu_entry)); next+=sizeof(struct cpu_entry); PRINT_CPU_ENTRY(cpu); if ((ce.ce_flags & CE_EN_FLAG_MASK)==0) ADDS_MP_STATUS("MP PANIC: disabled apics not currently supported\n"); break;
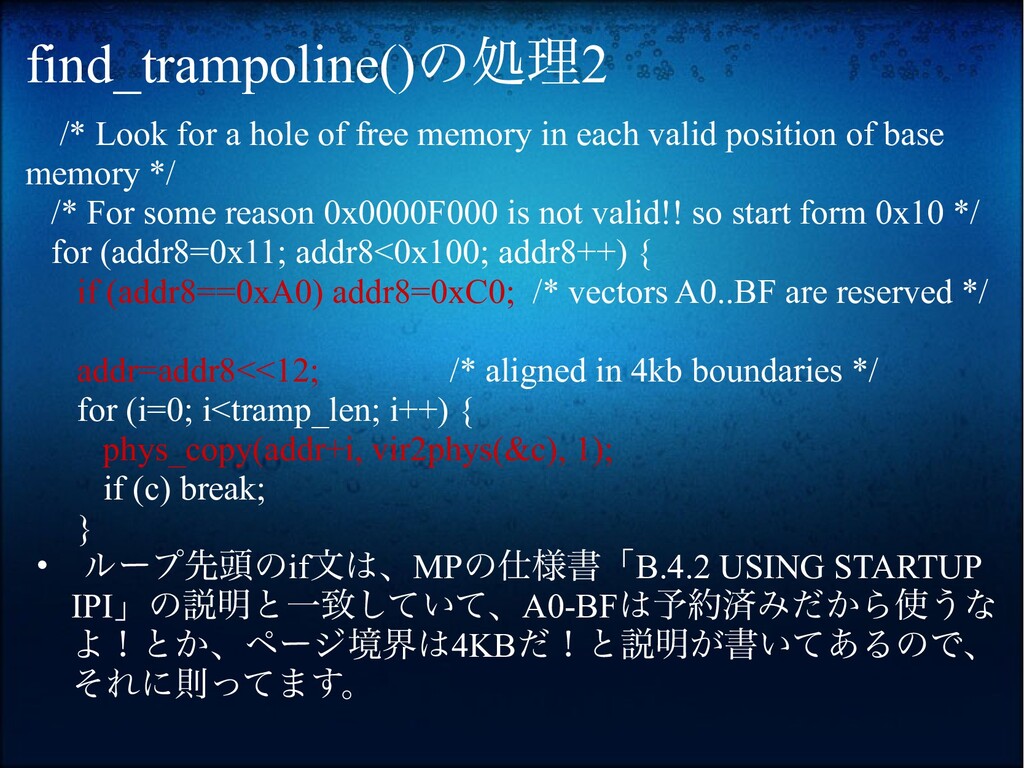
each valid position of base memory */ /* For some reason 0x0000F000 is not valid!! so start form 0x10 */ for (addr8=0x11; addr8<0x100; addr8++) { if (addr8==0xA0) addr8=0xC0; /* vectors A0..BF are reserved */ addr=addr8<<12; /* aligned in 4kb boundaries */ for (i=0; i<tramp_len; i++) { phys_copy(addr+i, vir2phys(&c), 1); if (c) break; } • ループ先頭のif文は、MPの仕様書「B.4.2 USING STARTUP IPI」の説明と一致していて、A0-BFは予約済みだから使うな よ!とか、ページ境界は4KBだ!と説明が書いてあるので、 それに則ってます。
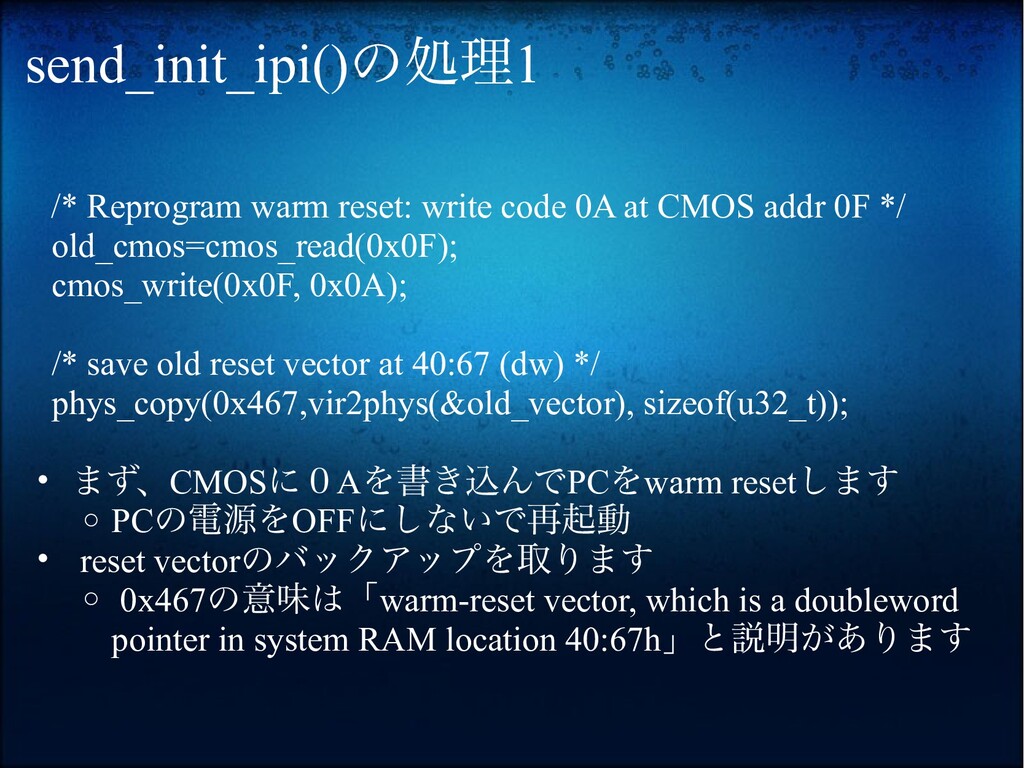
addr 0F */ old_cmos=cmos_read(0x0F); cmos_write(0x0F, 0x0A); /* save old reset vector at 40:67 (dw) */ phys_copy(0x467,vir2phys(&old_vector), sizeof(u32_t)); • まず、CMOSに0Aを書き込んでPCをwarm resetします o PCの電源をOFFにしないで再起動 • reset vectorのバックアップを取ります o 0x467の意味は「warm-reset vector, which is a doubleword pointer in system RAM location 40:67h」と説明があります
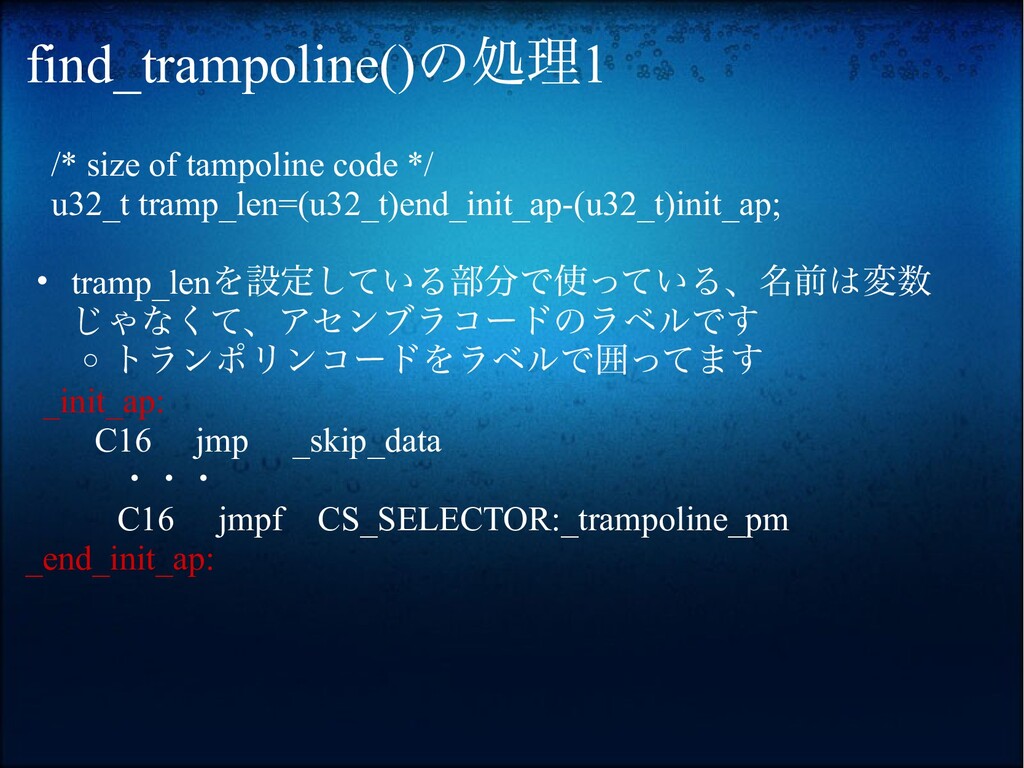
with 0's the memory zone used for trampoline */ char dummy=0; u32_t tramp_len=(u32_t)end_init_ap-(u32_t)init_ap; while (tramp_len--) phys_copy((u32_t)&dummy,addr++,1); }
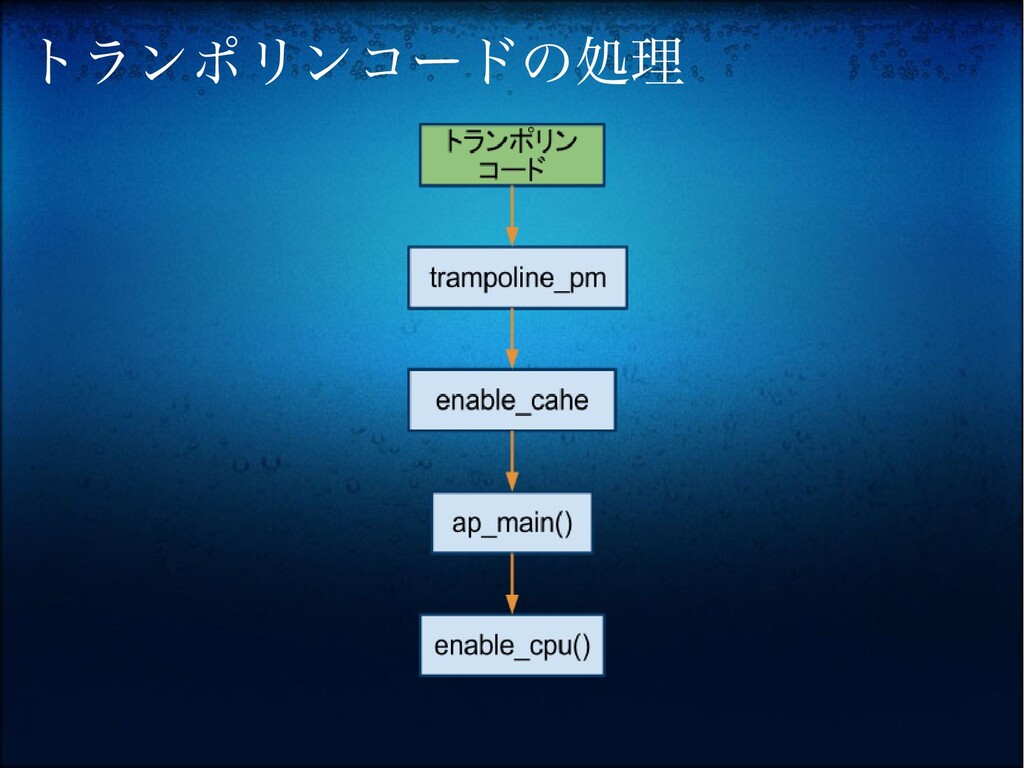
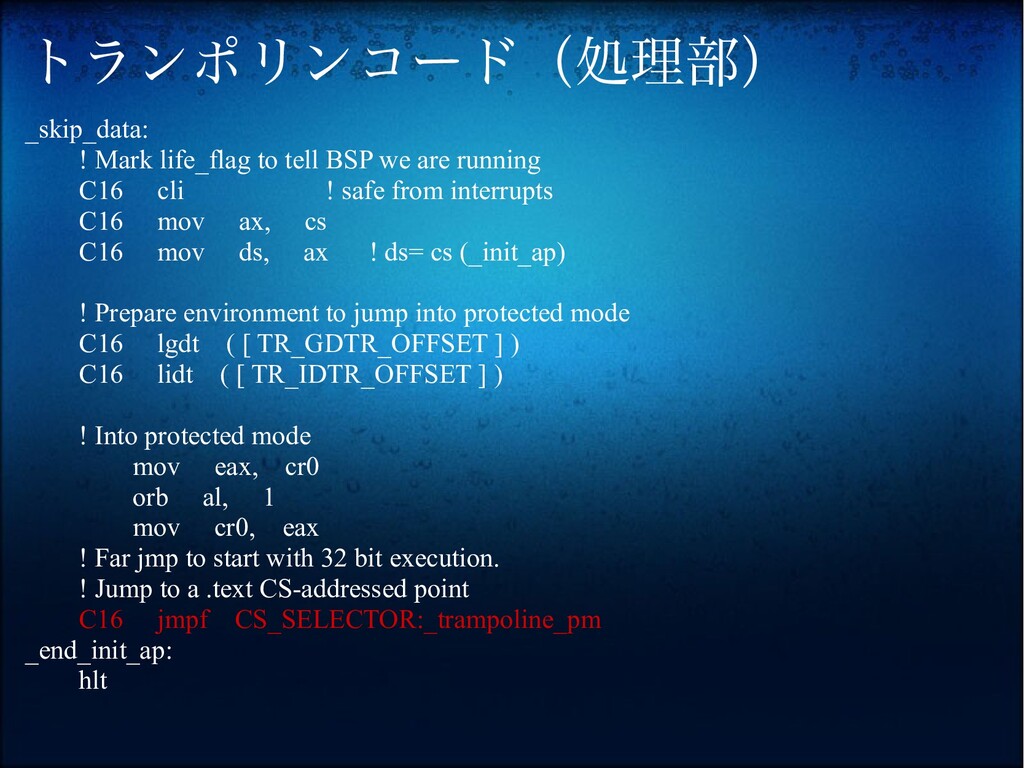
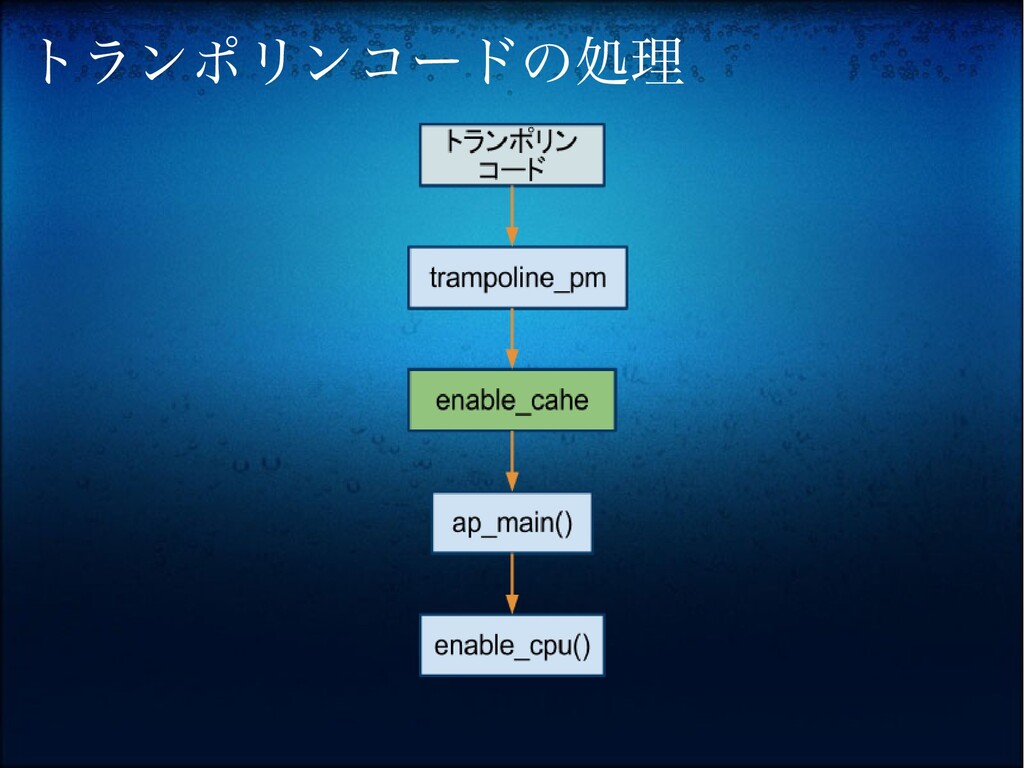
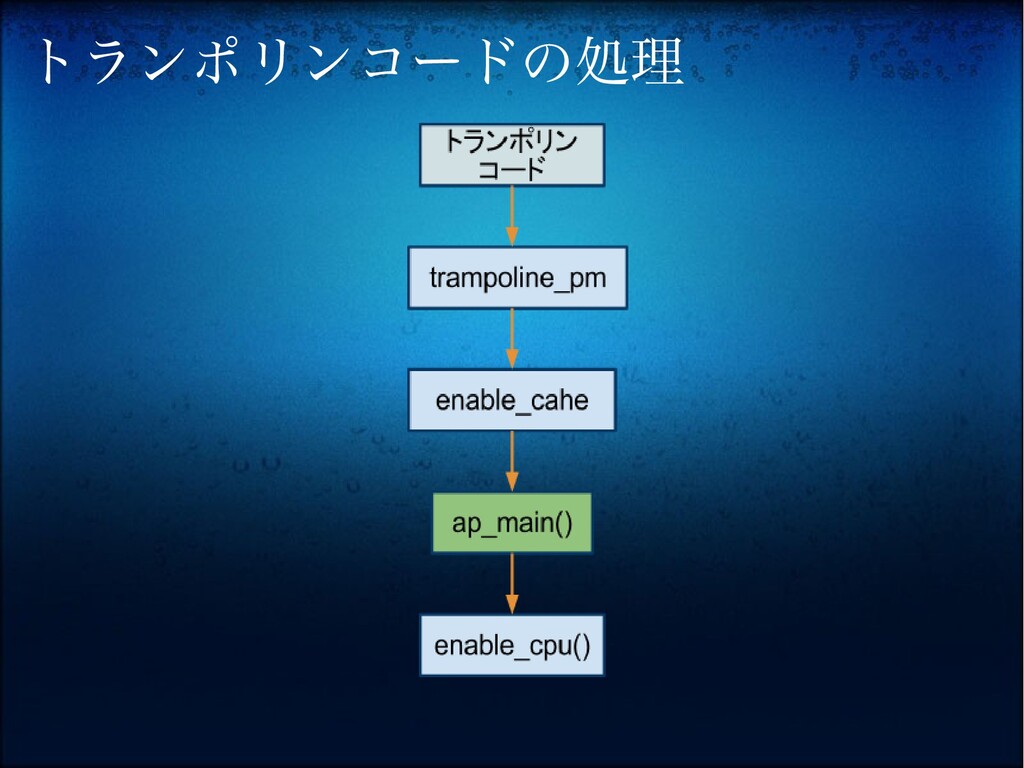
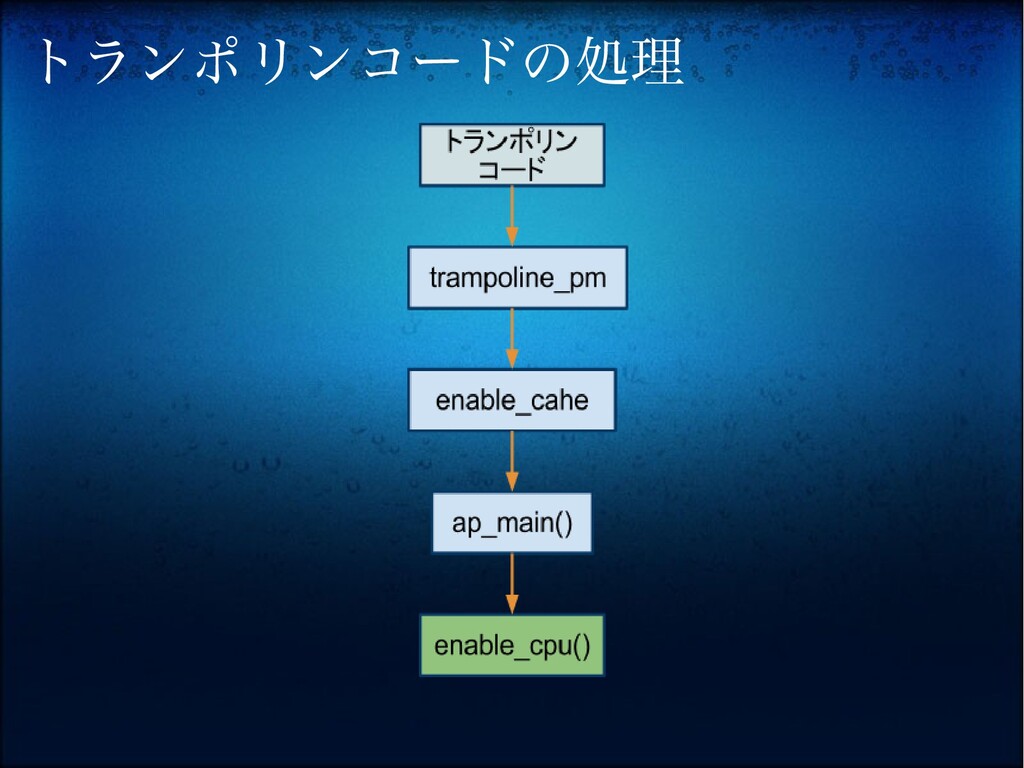
BSP we are running in real mode o Read values of many registers to prepare environment to jump into protected mode in same conditions as BSP o Change to protected mode o Jump to protected mode trampoline section • トランポリンコードはアセンブラのコードですが、最終的 にap_main()というCの関数を呼び出すまでが一連の処理です
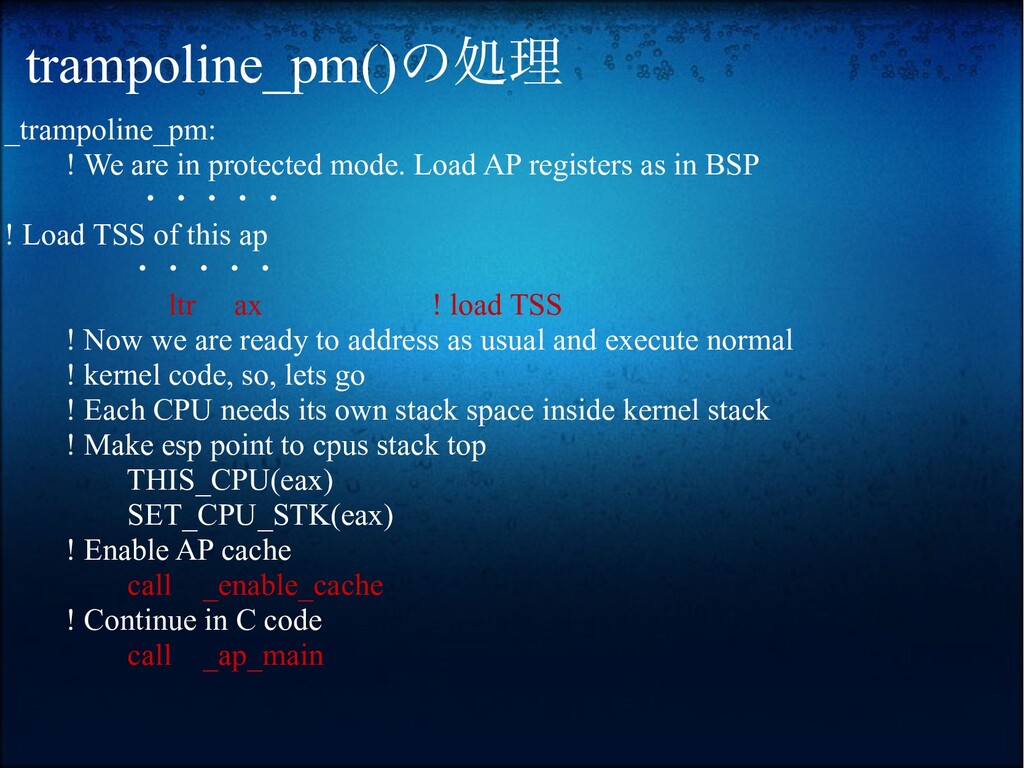
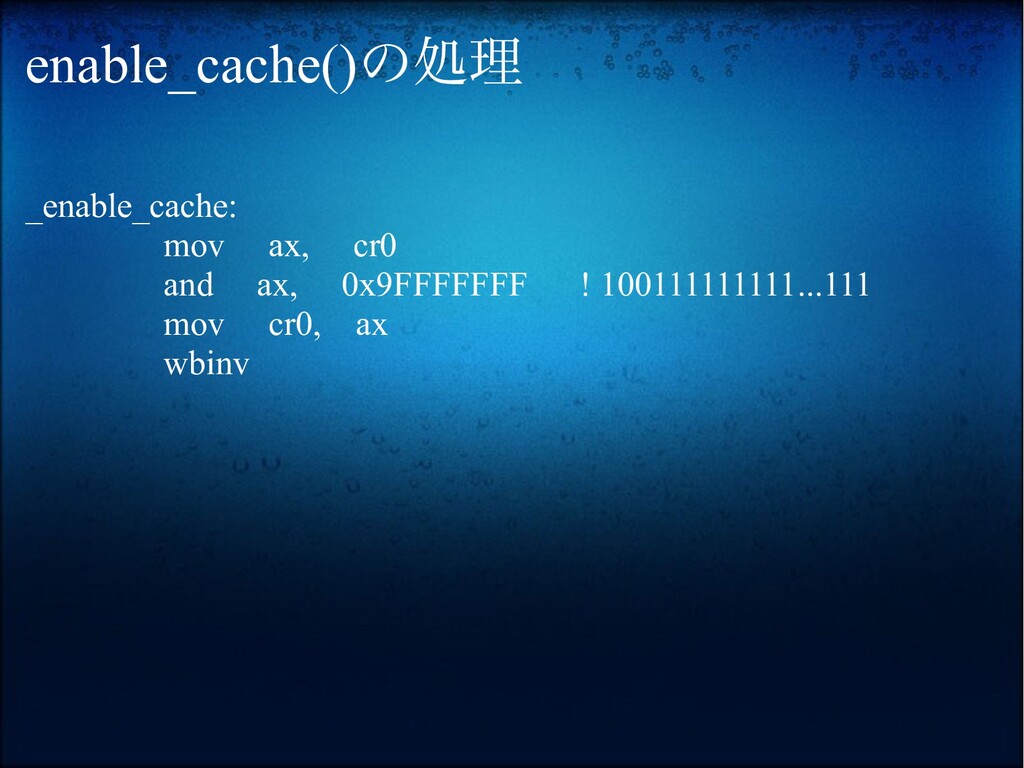
registers as in BSP ・・・・・ ! Load TSS of this ap ・・・・・ ltr ax ! load TSS ! Now we are ready to address as usual and execute normal ! kernel code, so, lets go ! Each CPU needs its own stack space inside kernel stack ! Make esp point to cpus stack top THIS_CPU(eax) SET_CPU_STK(eax) ! Enable AP cache call _enable_cache ! Continue in C code call _ap_main
is the entry point before the CPU has been started and jumped to protected mode */ /* Tell BSP we are running */ ap_running_flag=AP_LIFE_FLAG_MARK; /* Now we're ready to take some work. We find any task and call restart() to execute it (or to idle), but we must synchonize other cpus before enter kernel code */ lock_mp_kernel(); /* restart() will unlock later */
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![fps構造体 struct floating_pointer { char fp_signature[4]; /* must be _MP_](https://files.speakerdeck.com/presentations/b7607dfdb65b4e41aa8d640f2f8ba90d/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}