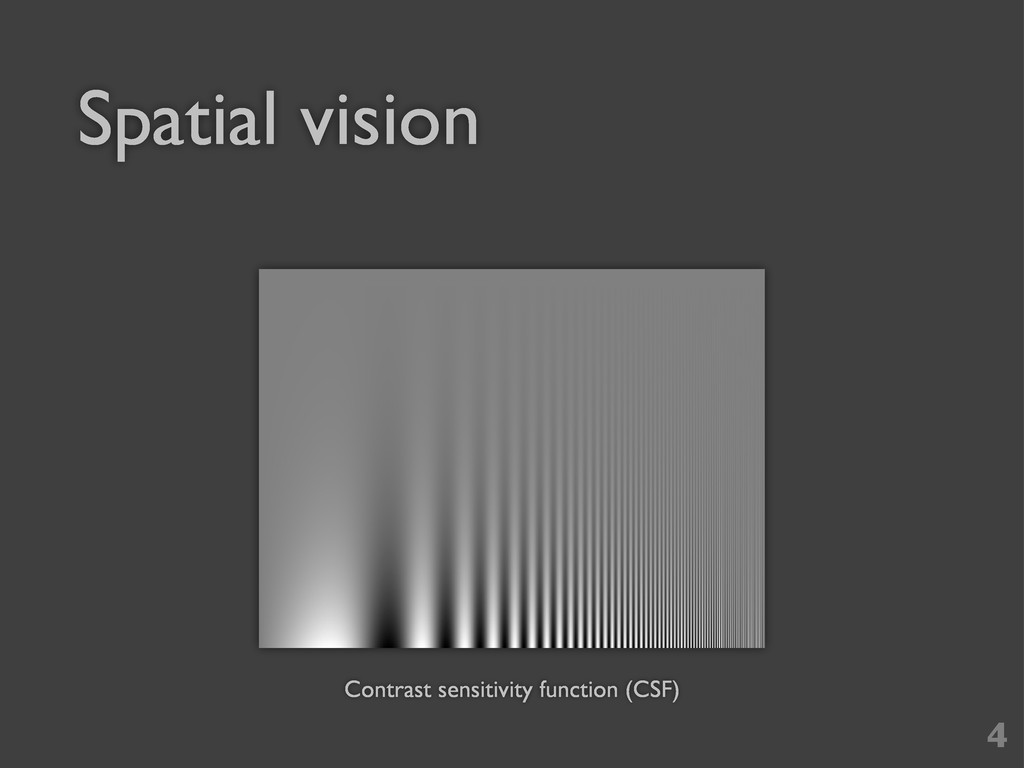
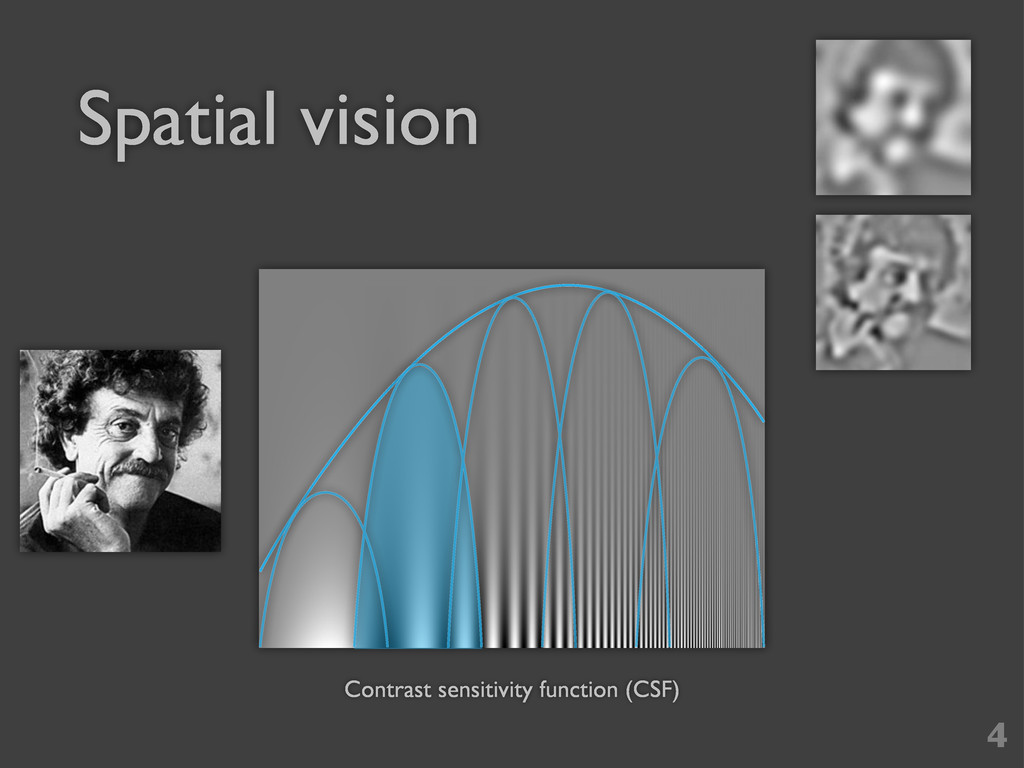
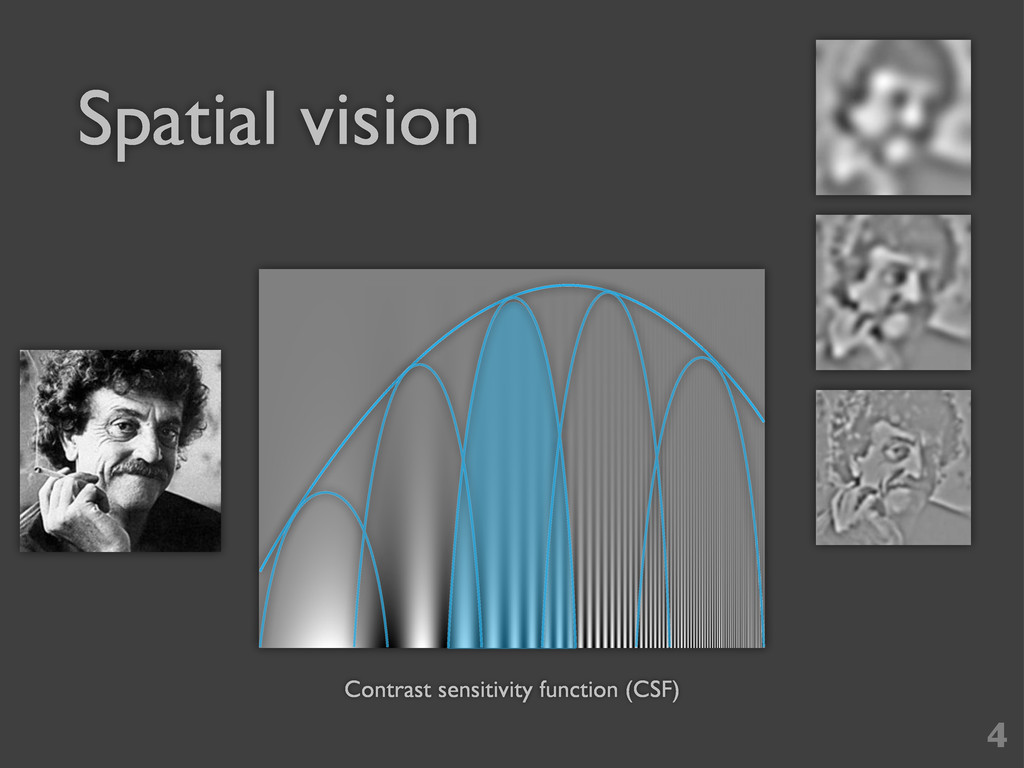
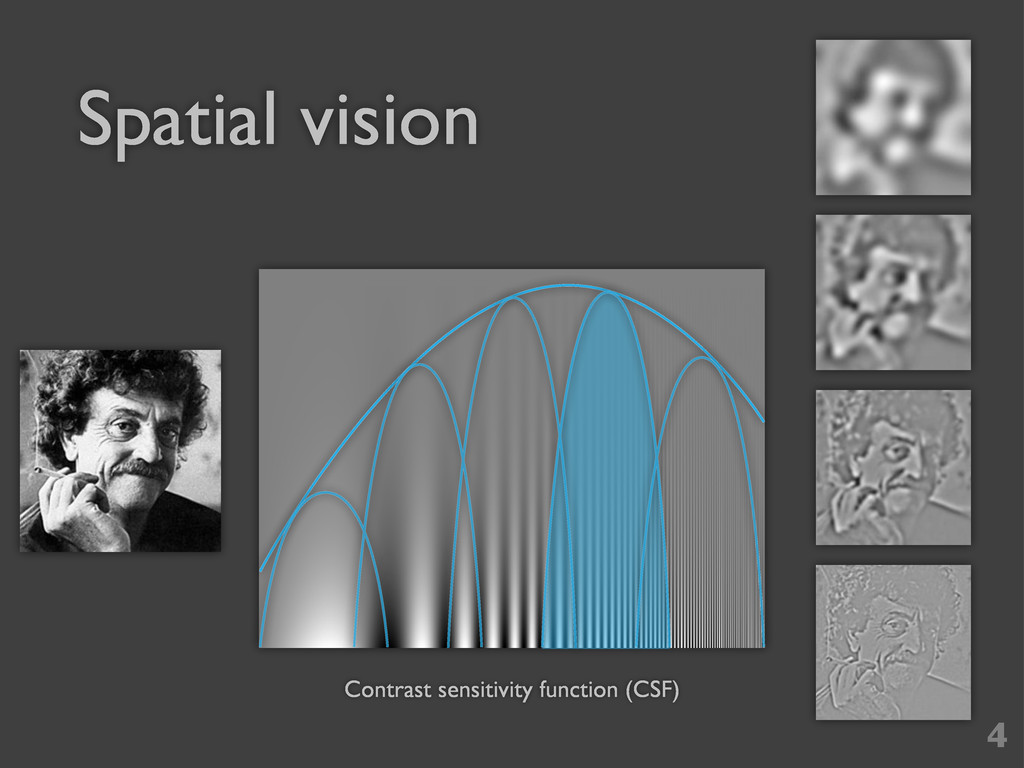
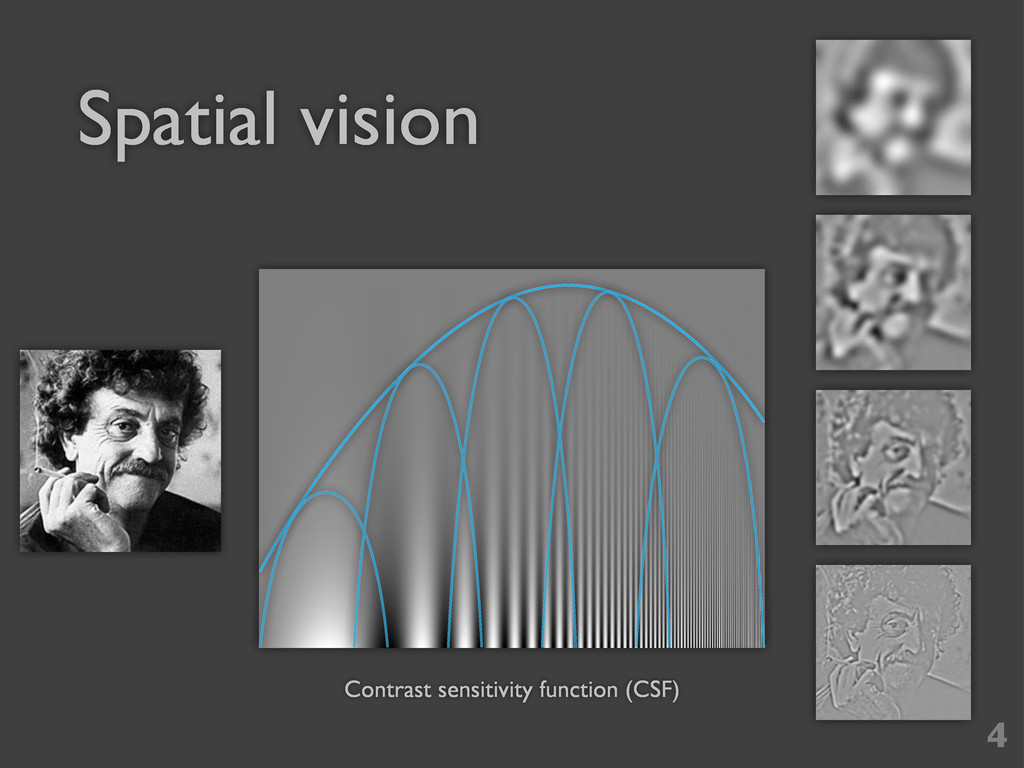
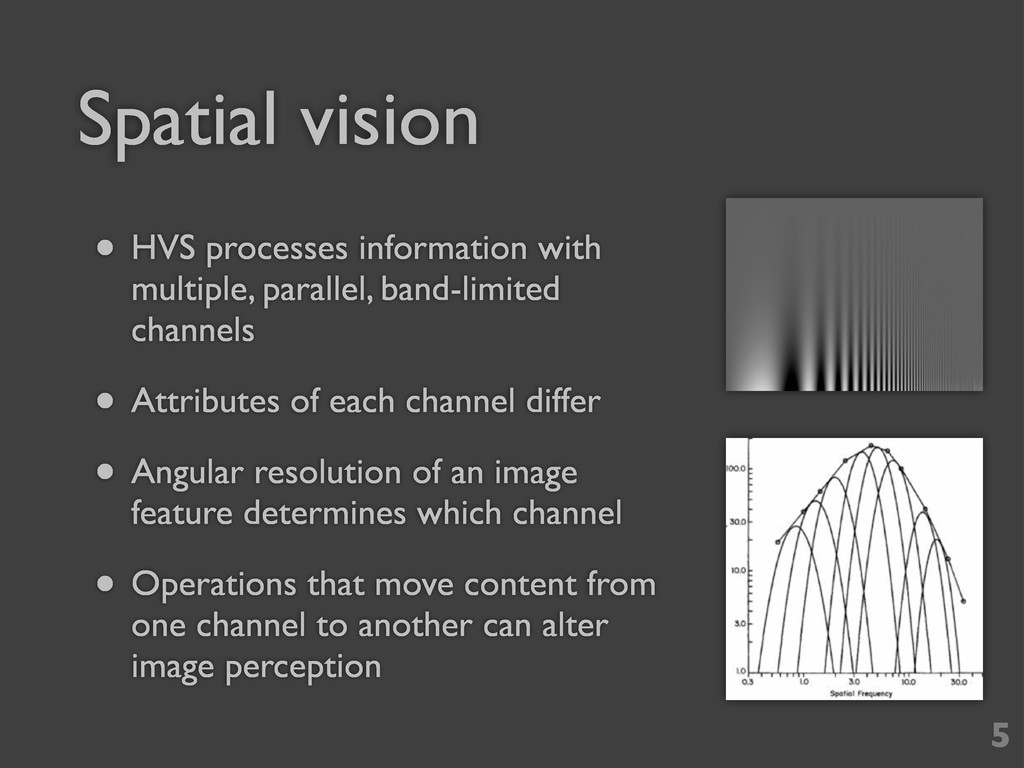
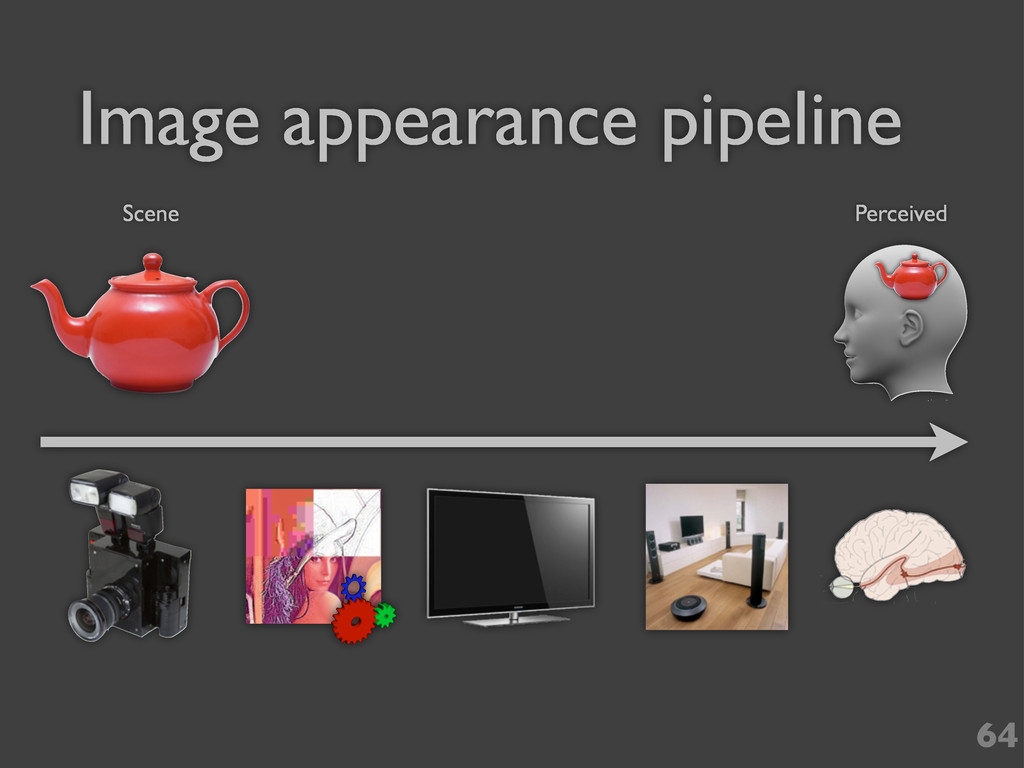
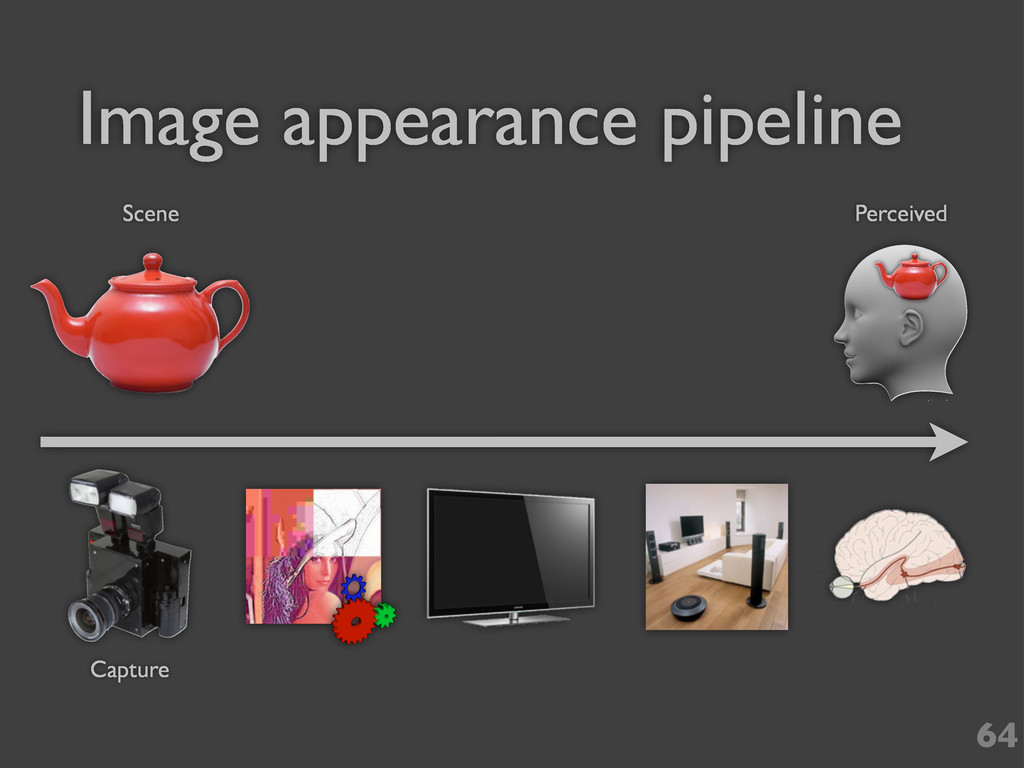
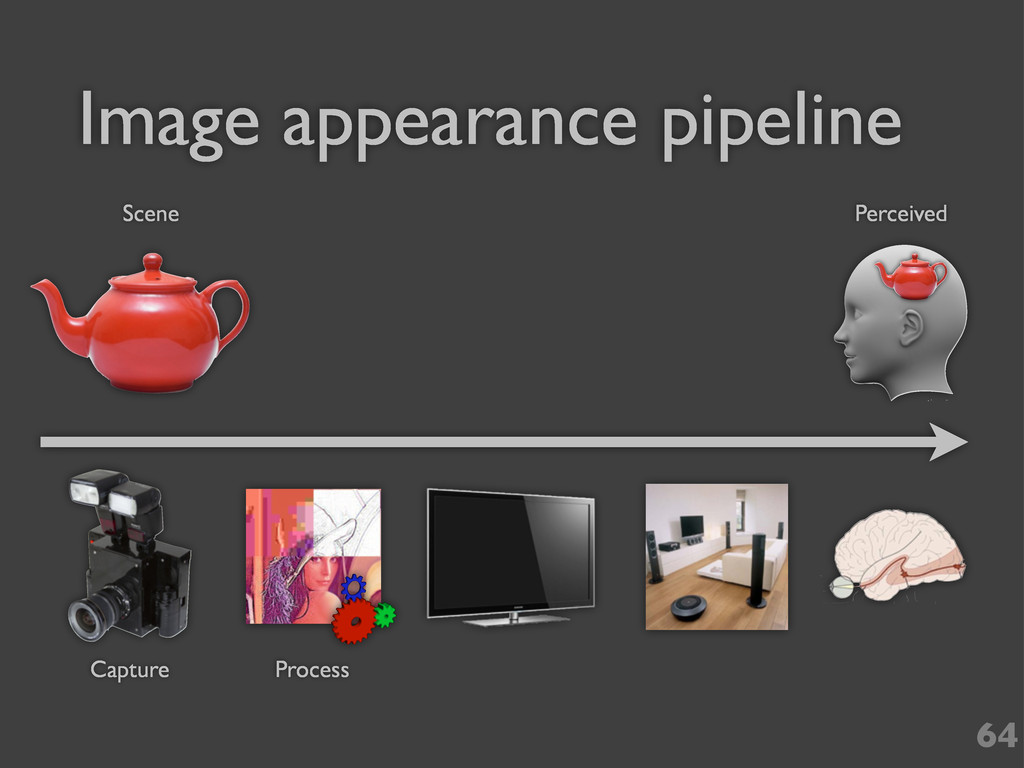
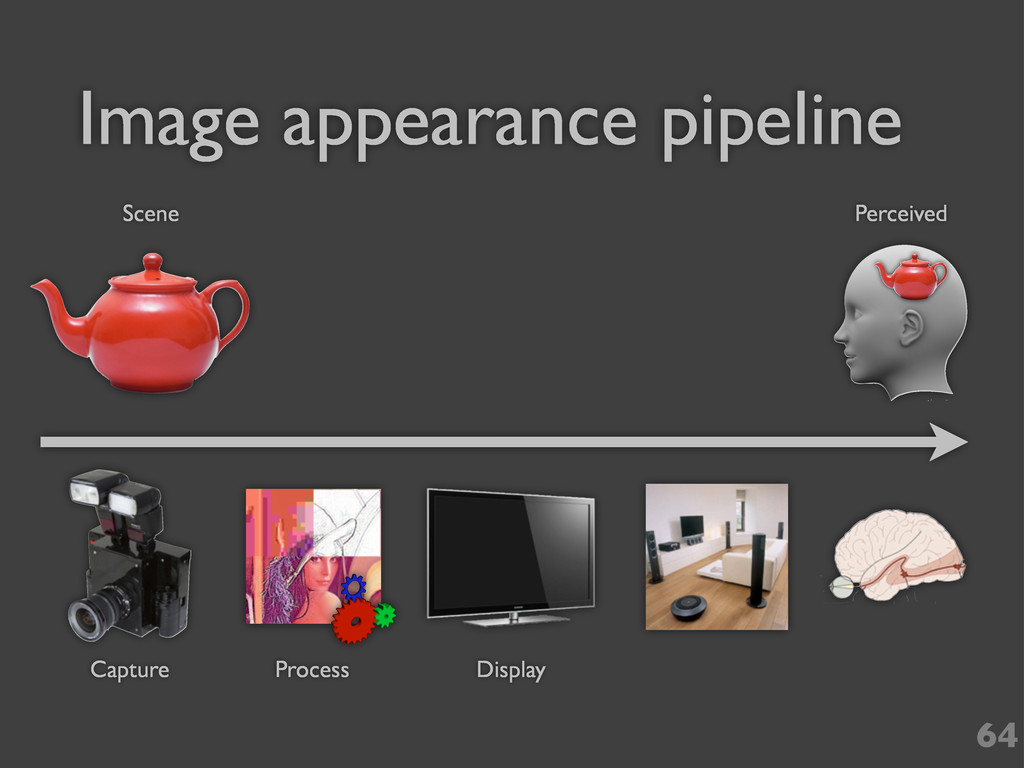
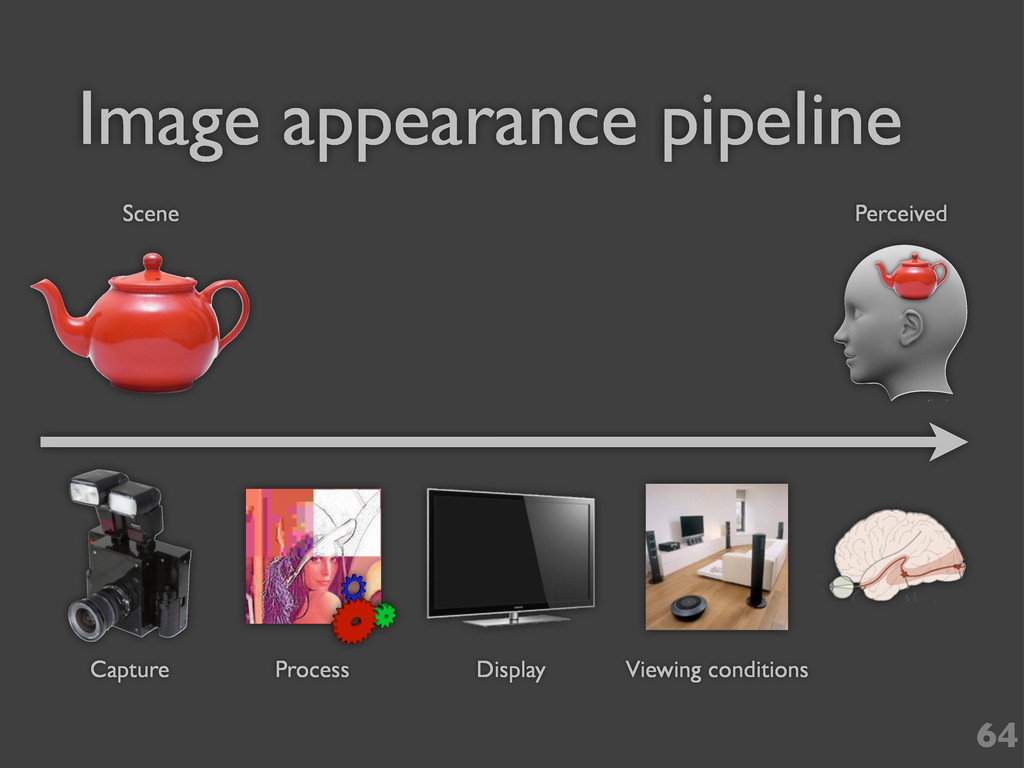
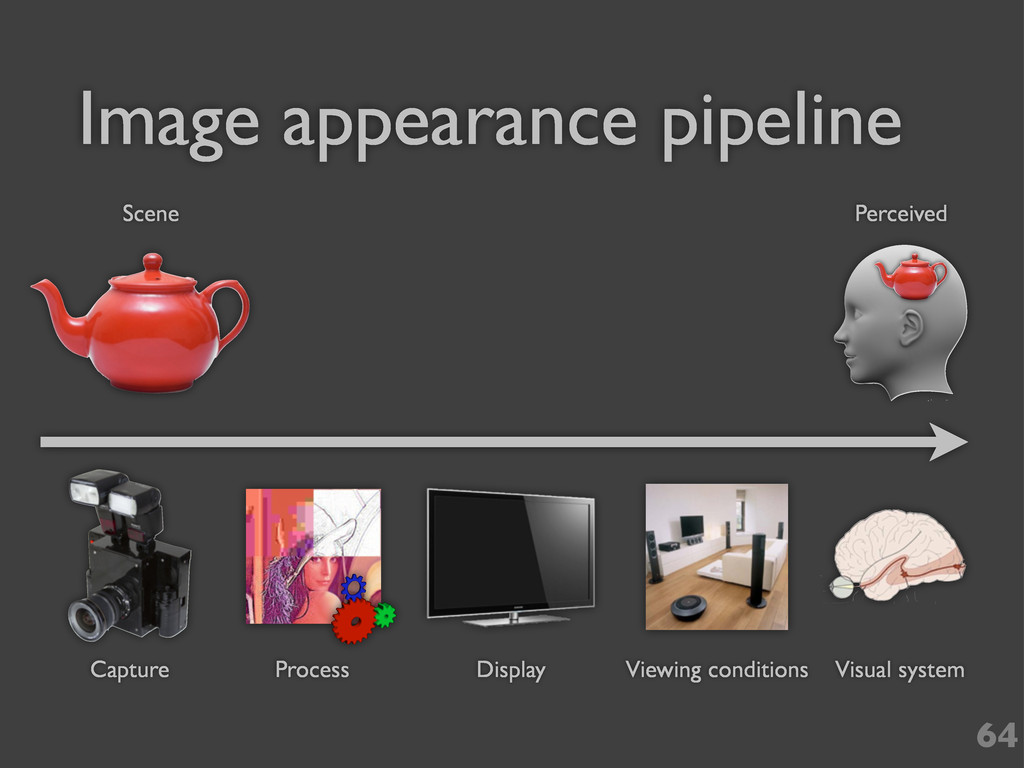
The purpose of most images is to effectively convey information. Implicit in this assumption is the fact that the recipient of that information is a human observer, with a visual system responsible for converting raw sensory inputs into the perceived appearance. The appearance of an image not only depends on the image itself, but the conditions under which it is viewed as well as the response of human visual system to those inputs. This thesis examines the scale-dependent nature of image appearance, where the same stimulus can appear different when viewed at varying scales, that arises from the mechanisms responsible for processing spatial vision in the brain. In particular, this work investigates changes in the perception of blur and contrast resulting from the image being represented by different portions of the viewer's visual system due to changes in image scale. These methods take inspiration from the fundamental organization of spatial image perception into multiple parallel channels for processing visual information and employ models of human spatial vision to more accurately control the appearance of images under changing viewing conditions. The result is a series of methods for understanding the blur and contrast present in images and manipulating the appearance of those qualities in a perceptually-meaningful way.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Hybrid images 6 [Oliva et al. 2006]](https://files.speakerdeck.com/presentations/506608c6e64bdf000201ebf3/slide_17.jpg){kind=link}
![Hybrid images 6 [Oliva et al. 2006]](https://files.speakerdeck.com/presentations/506608c6e64bdf000201ebf3/slide_18.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![44 Tonemapping Original [Durand and Dorsey 2002] Adjust to approximate](https://files.speakerdeck.com/presentations/506608c6e64bdf000201ebf3/slide_80.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}