Many real-world scenes contain a dynamic range that exceeds conventional display technology by several orders of magnitude. Through the combination of several existing technologies, new high dynamic range displays, capable of reproducing a range of intensities much closer to that of real environments, have been constructed. These benefits come at the cost of more optically complex devices; involving two image modulators, controlled in unison, to display images. We present several methods of rendering images to this new class of devices for reproducing photometrically accurate images. We discuss the process of calibrating a display, matching the response of the device with our ideal model. We then derive series of methods for efficiently displaying images, optimized for different criteria and evaluate them in a perceptual framework.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Backlight simulation • Takes LED values d 㱨 [0,1] from](https://files.speakerdeck.com/presentations/01d5c3500d16013084d21231381d9bd4/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
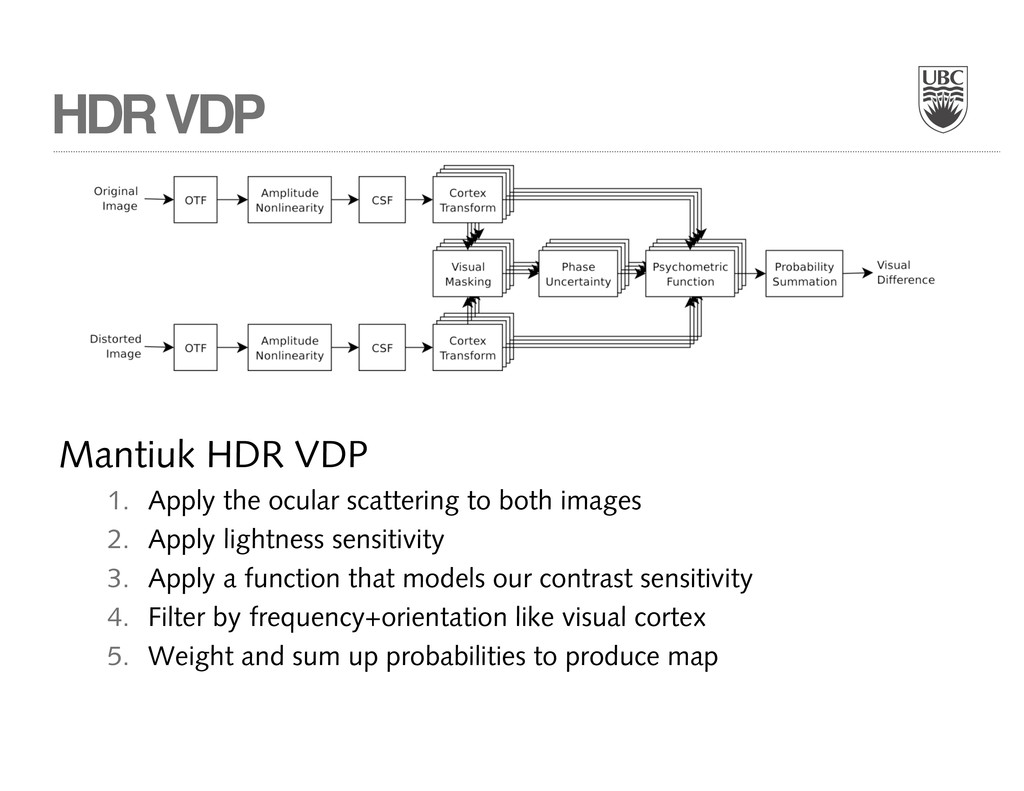
![Evaluation • We make use of [Mantiuk 2005] HDR VDP](https://files.speakerdeck.com/presentations/01d5c3500d16013084d21231381d9bd4/slide_42.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}