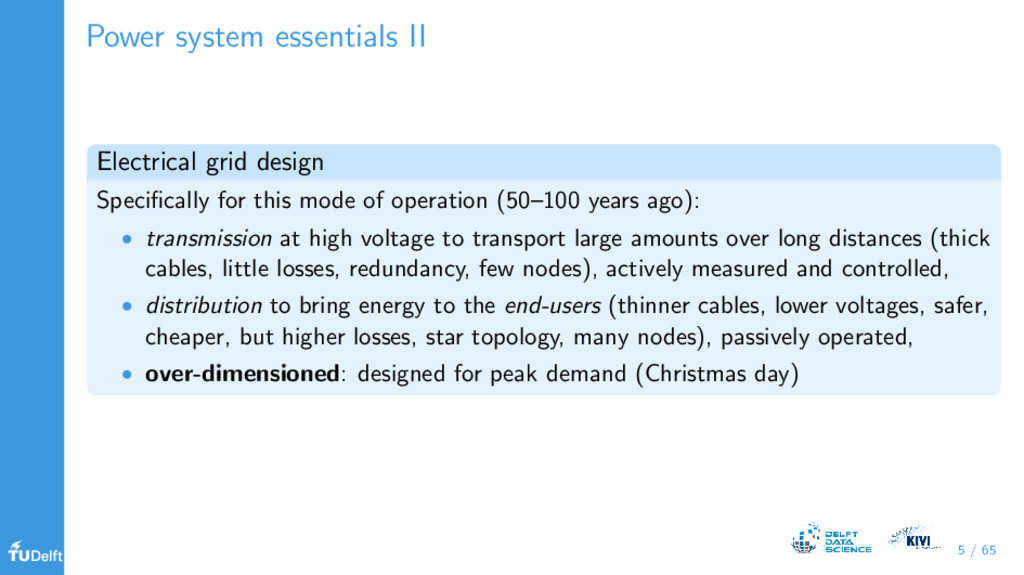
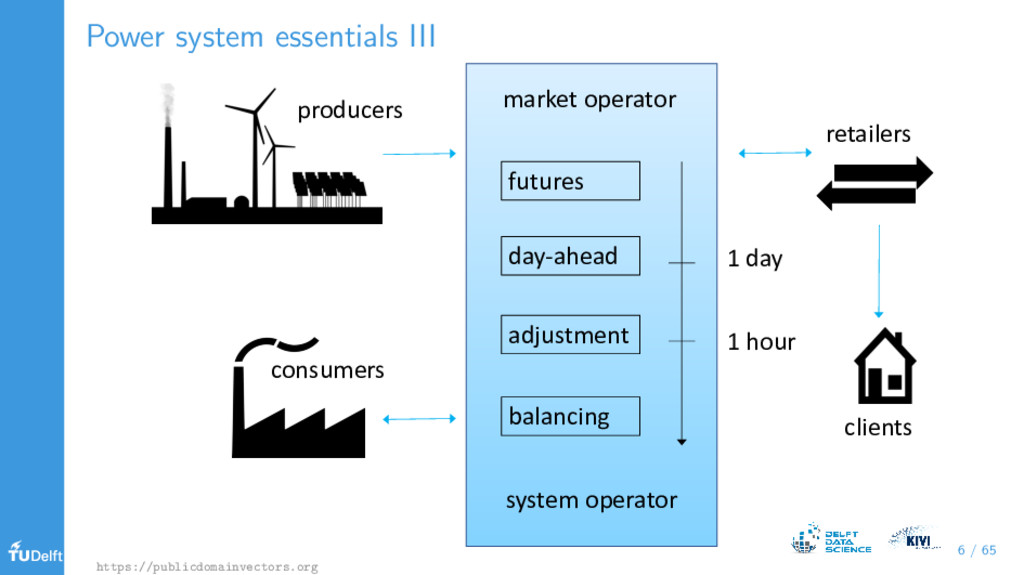
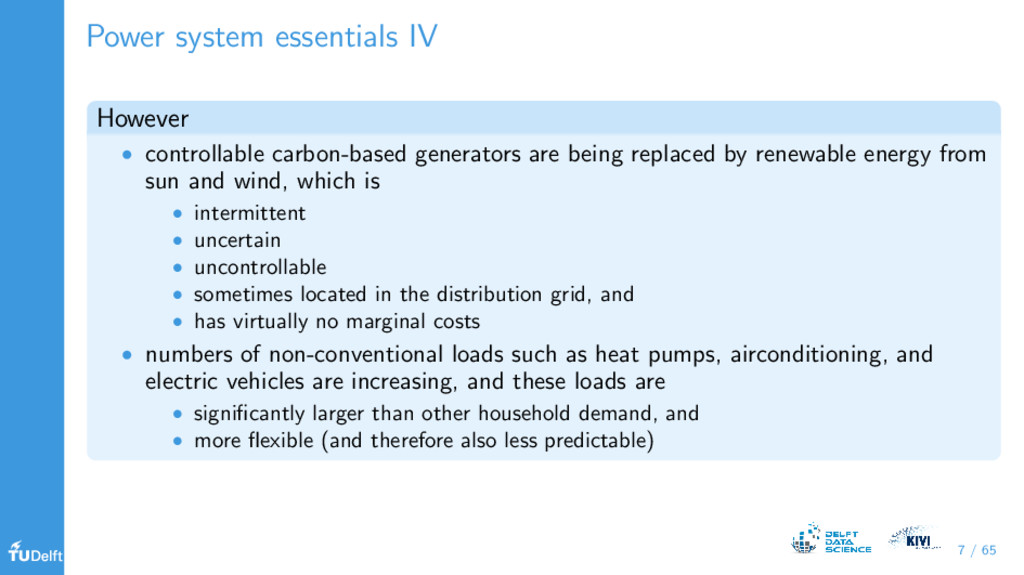
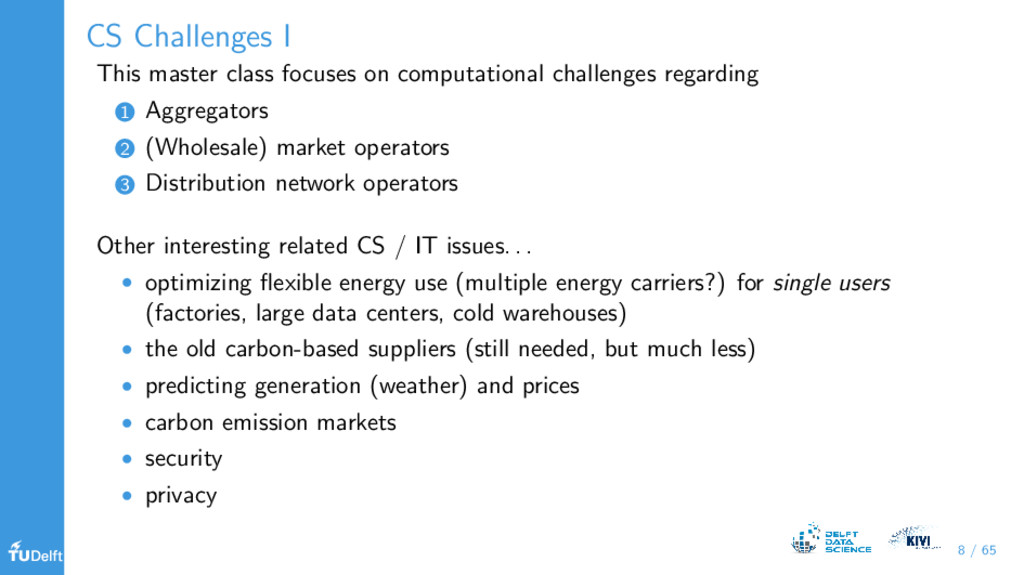
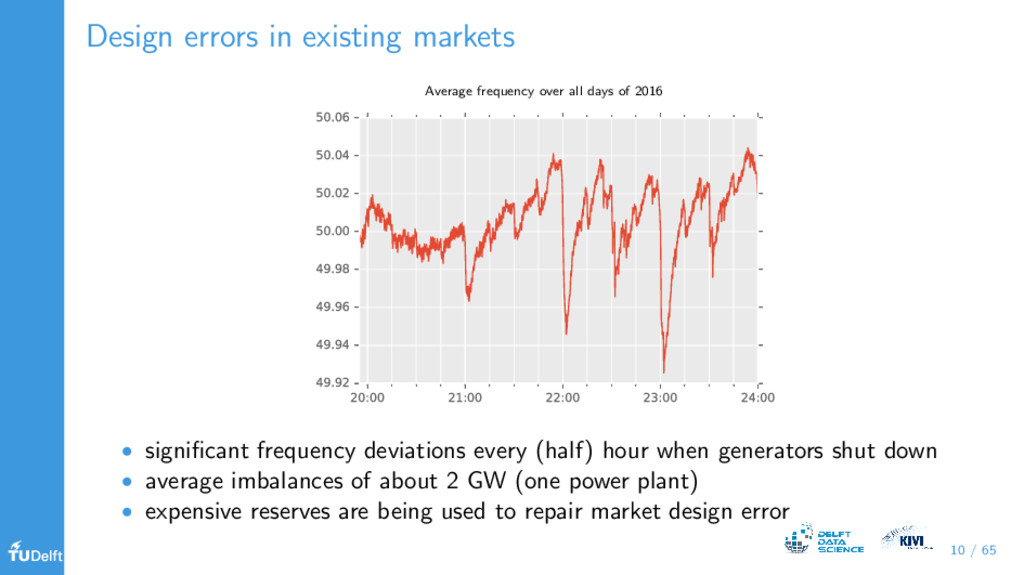
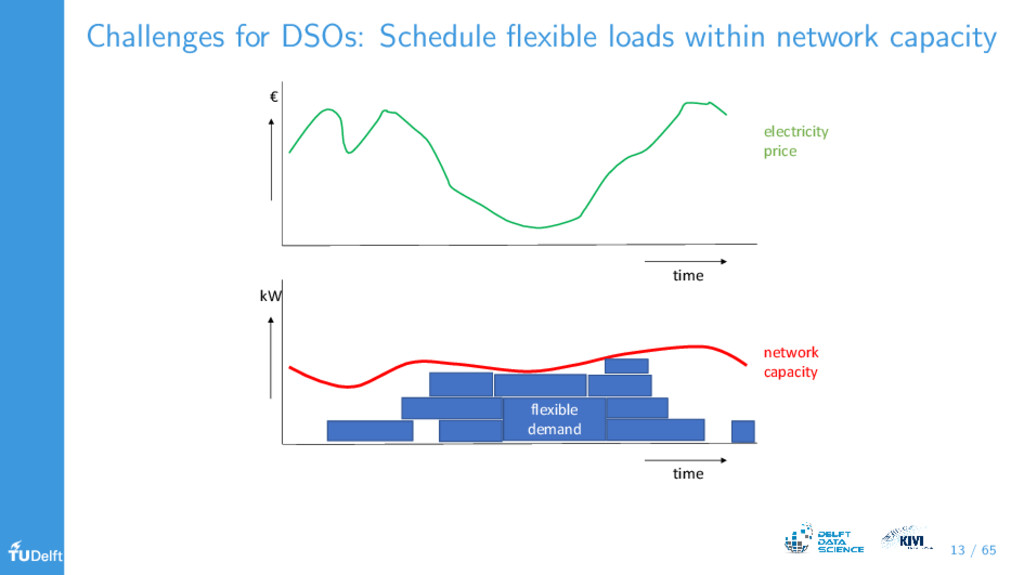
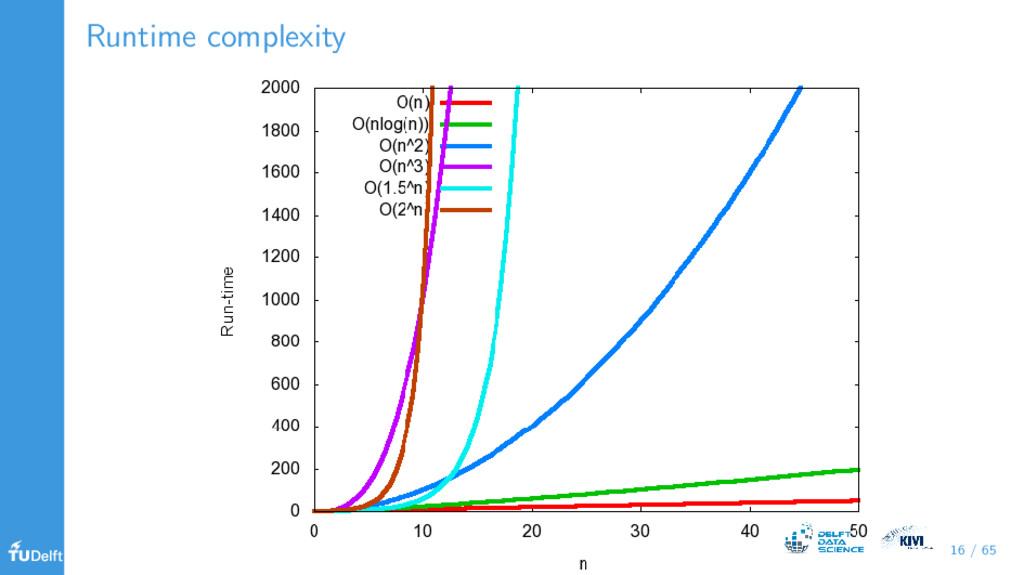
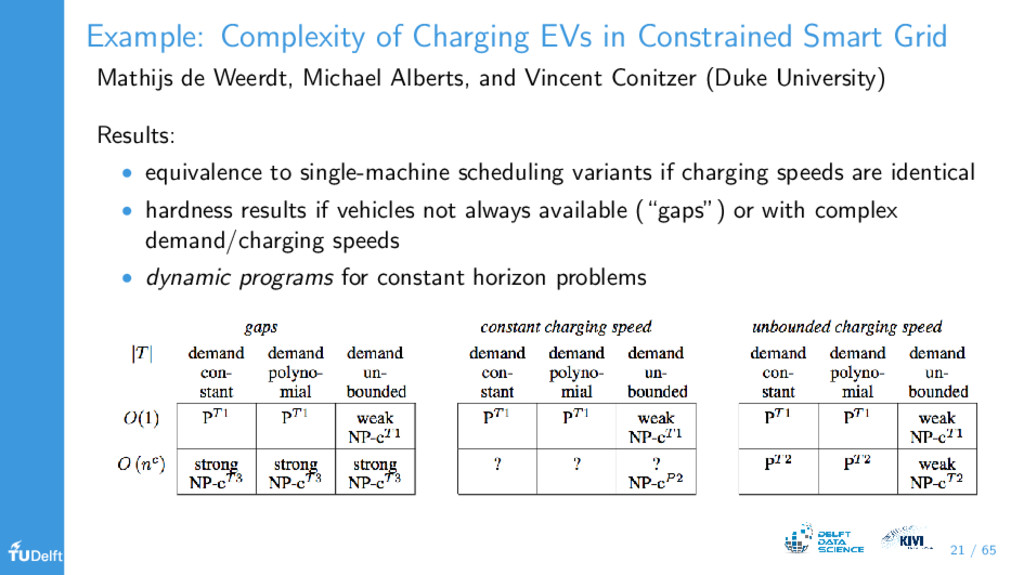
A domain with an enormous potential for planning algorithms is the smart grid. Renewables and flexible demand such as heat pumps and charging of electric vehicles bring more uncertainty, and also computational challenges for several parties in the electricity sector. There is the new role of an aggregator to schedule and trade the flexibility of demand in the electricity markets. The electricity markets themselves may need to be redesigned because of the intermittency of generation and flexible demand, resulting in more complexity in clearing the market. Distribution network operators need to coordinate the flexible demand in congested areas to prevent more demand shifting to a moment in time (with the lowest electricity price) than the capacity of the network allows. Each of these new challenges in the smart grid gives rise to an interesting optimization problem. Interesting, because typically they are NP-hard: there is no known algorithm that can directly solve such realistically-sized problems quickly enough.
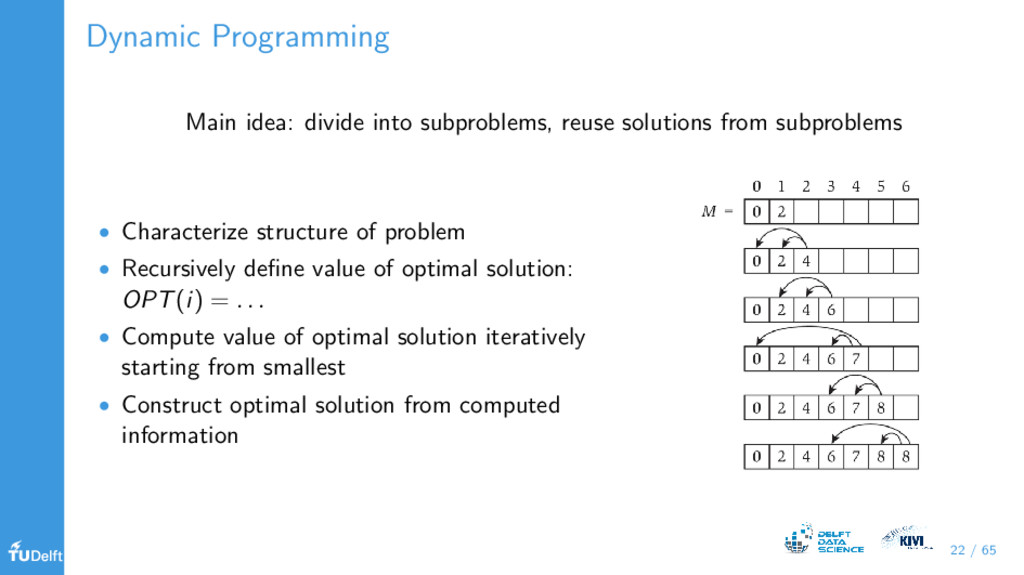
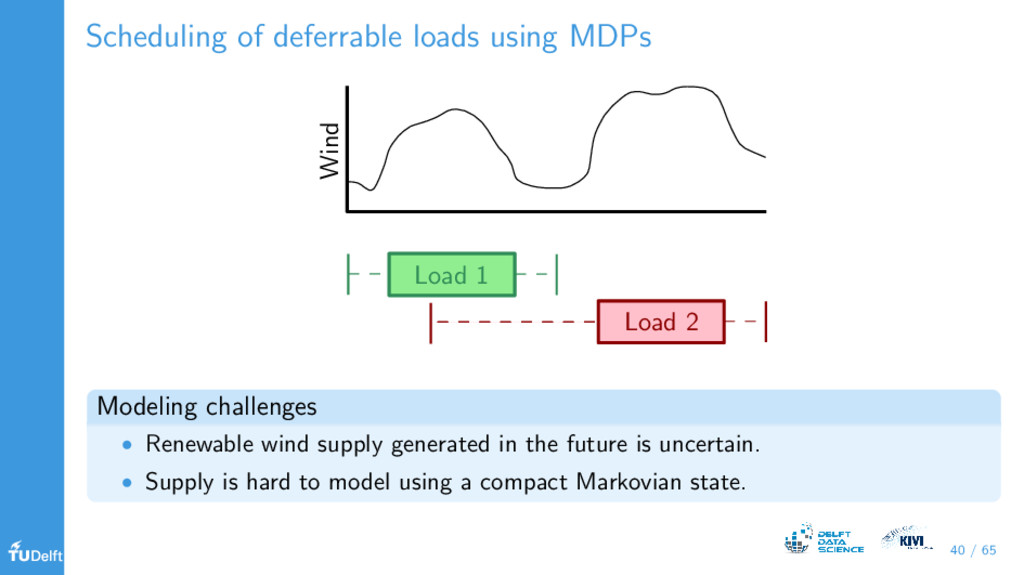
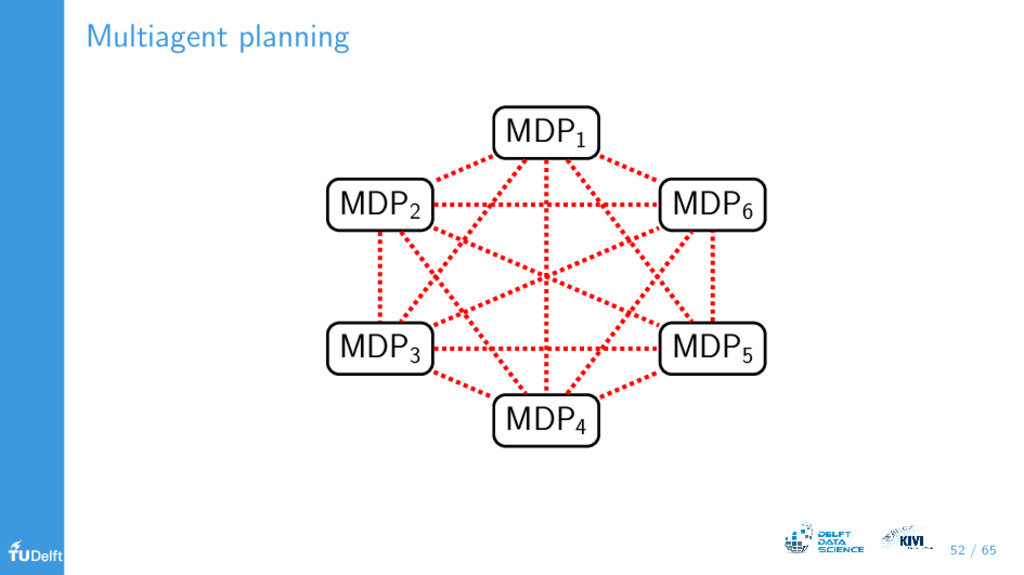
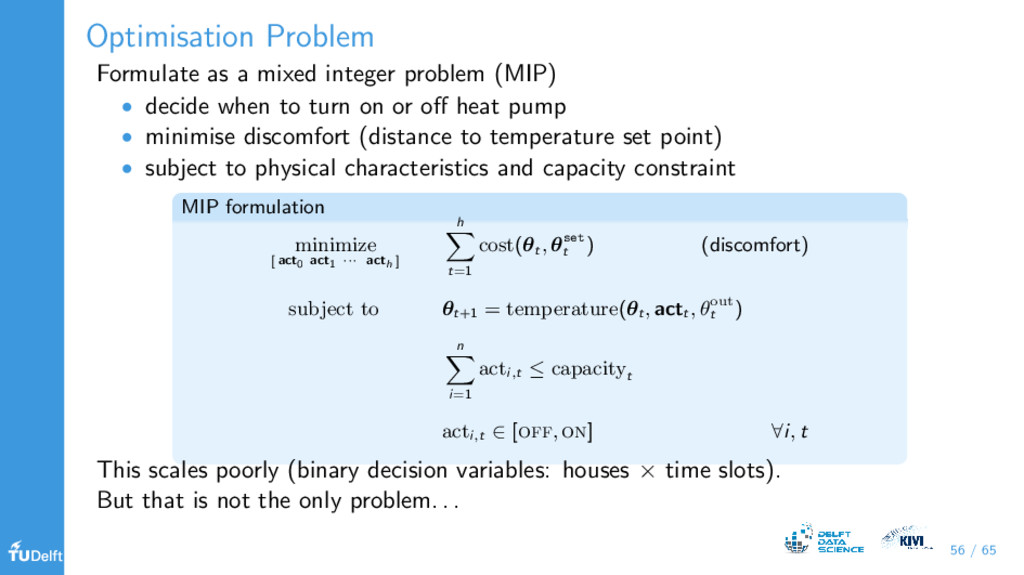
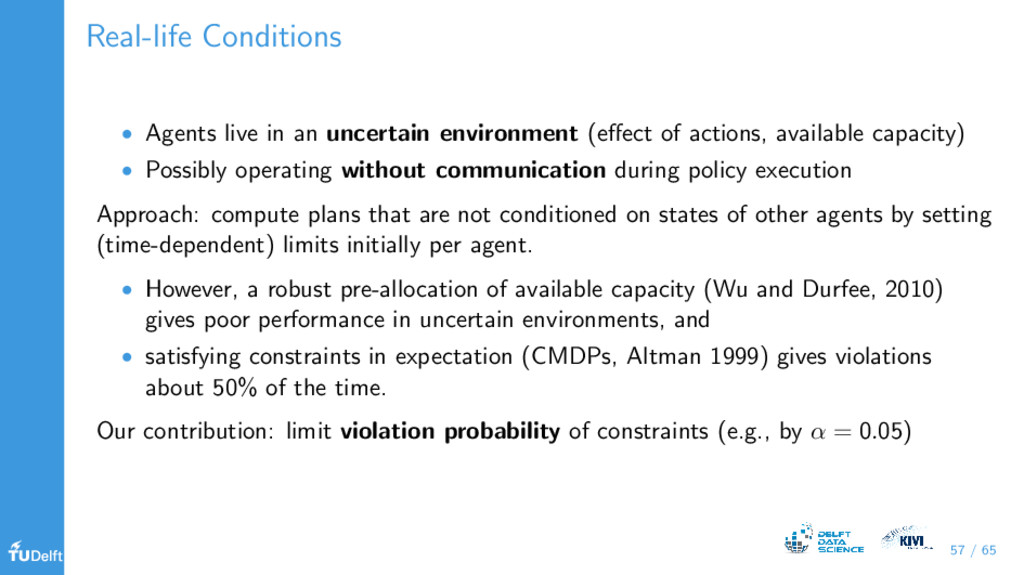
In our research we tackle such challenges by identifying and exploiting some structure in these problems. For example, to schedule a large number of heat pumps under a single network capacity constraint, we decouple the scheduling problems for the individual heat pumps as much as possible by representing the value for the network capacity of all heat pumps by an artificial `price’ for each moment in time. See also this blog post on the recently accepted paper by Frits de Nijs for the case where the constraint is not exactly known in advance (because of non-flexible demand on the network).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}