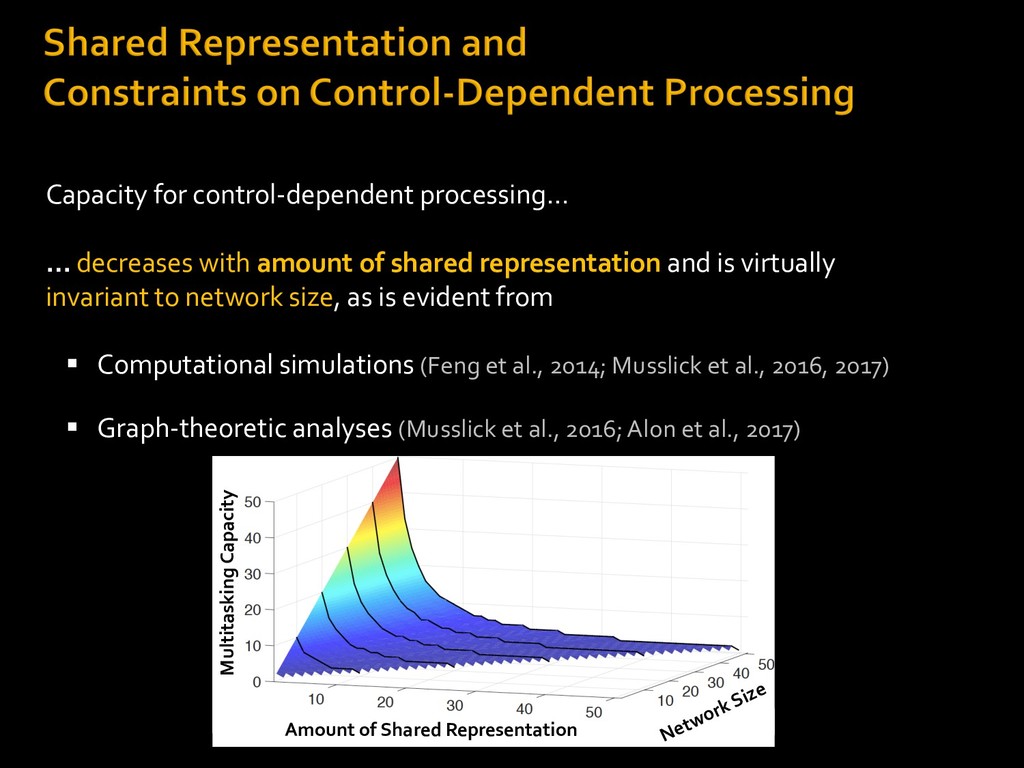
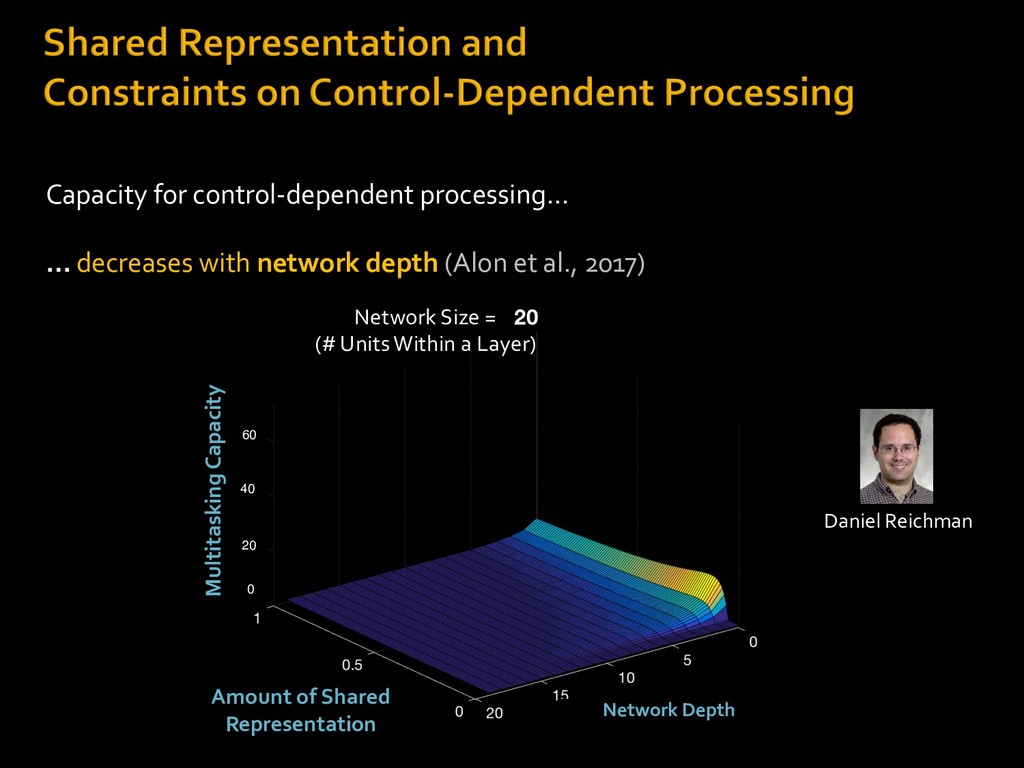
representation and is virtually invariant to network size, as is evident from § Computational simulations (Feng et al., 2014; Musslick et al., 2016, 2017) § Graph-theoretic analyses (Musslick et al., 2016; Alon et al., 2017) Multitasking Capacity Amount of Shared Representation Network Size
2016, 2017) § Graph-theoretic analyses (Musslick et al., 2016; Alon et al., 2017) § Estimation techniques derived from statistical mechanics (Petri et al., under review) Capacity for control-dependent processing… … decreases with amount of shared representation and is virtually invariant to network size, as is evident from
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}