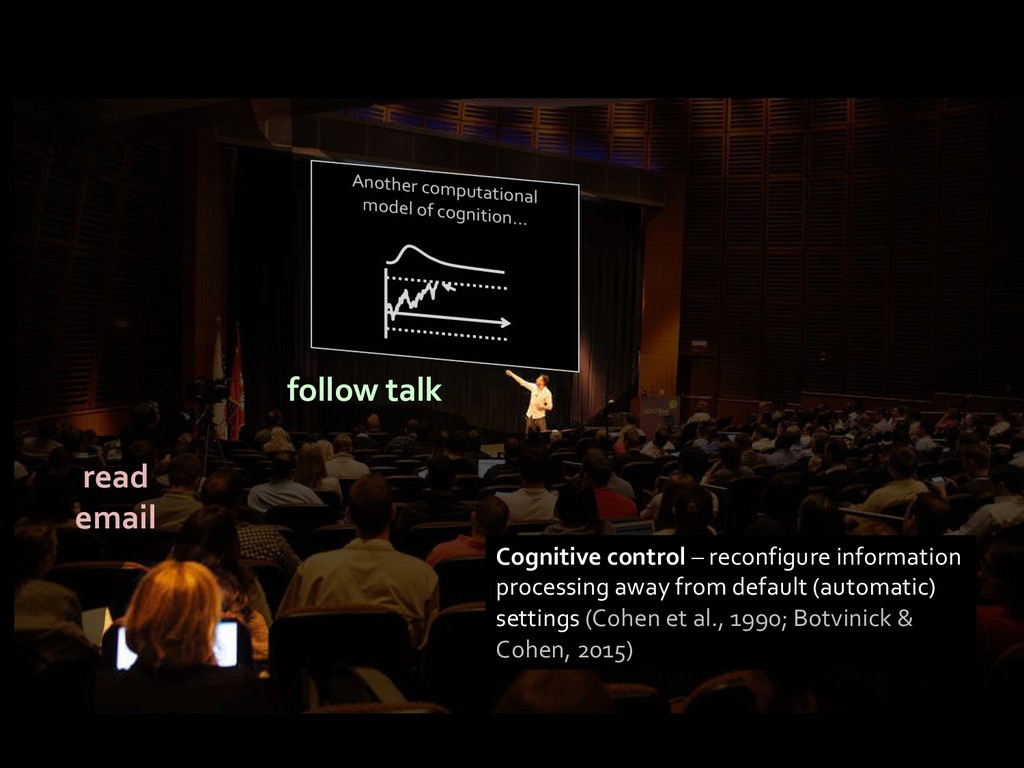
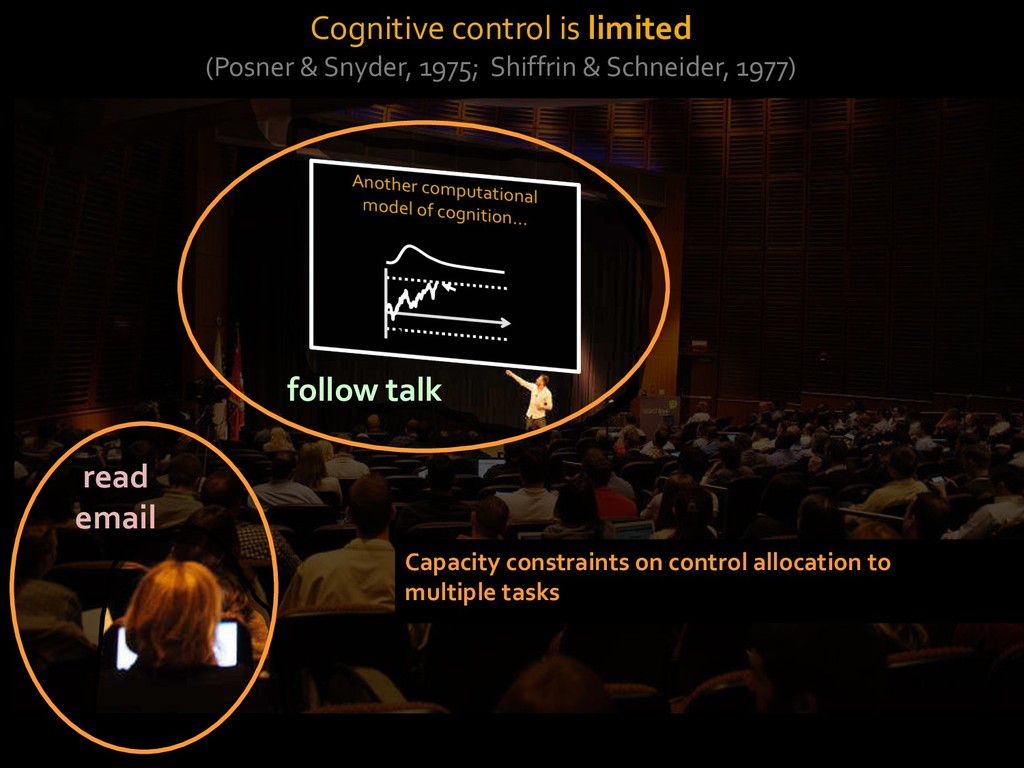
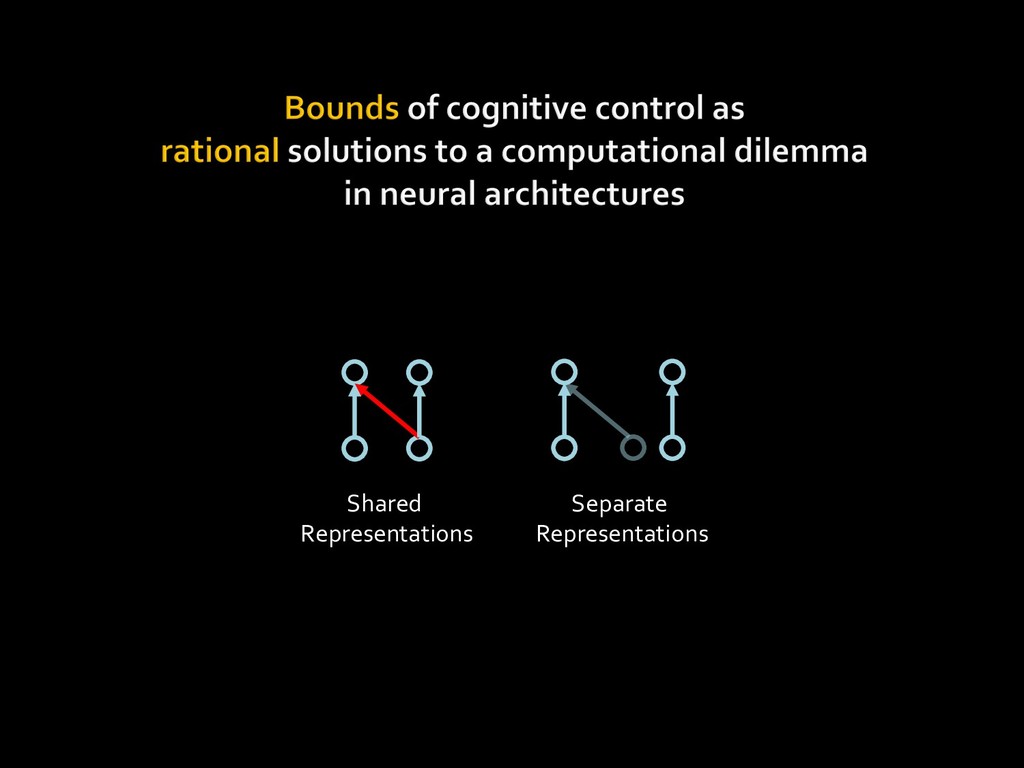
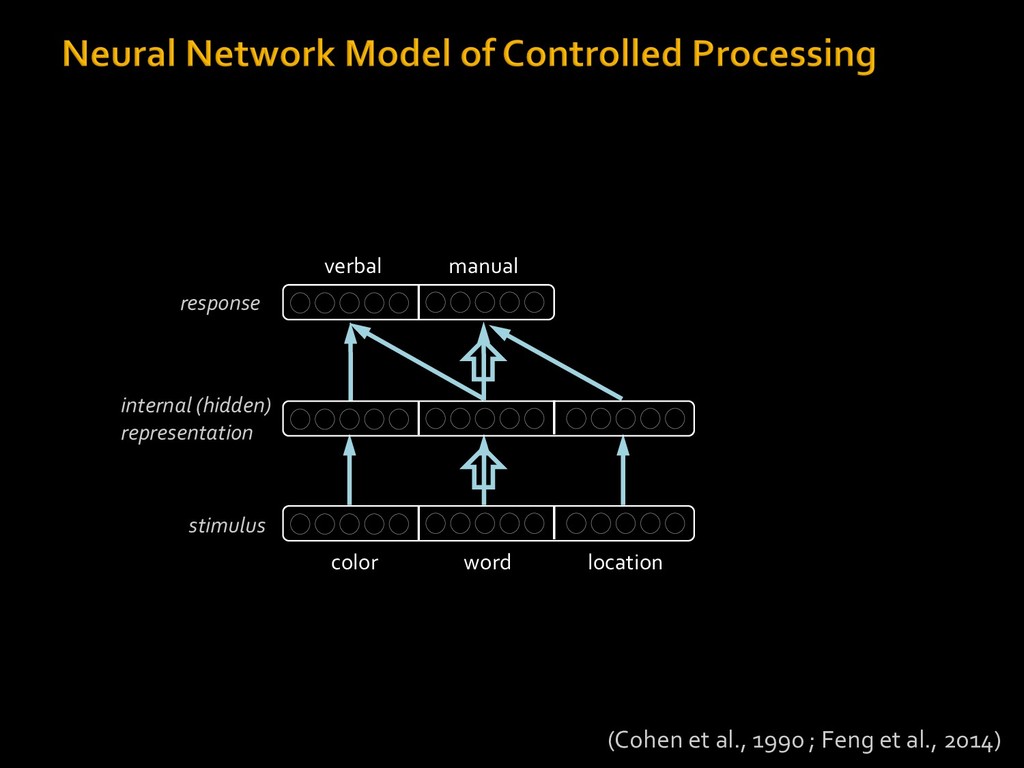
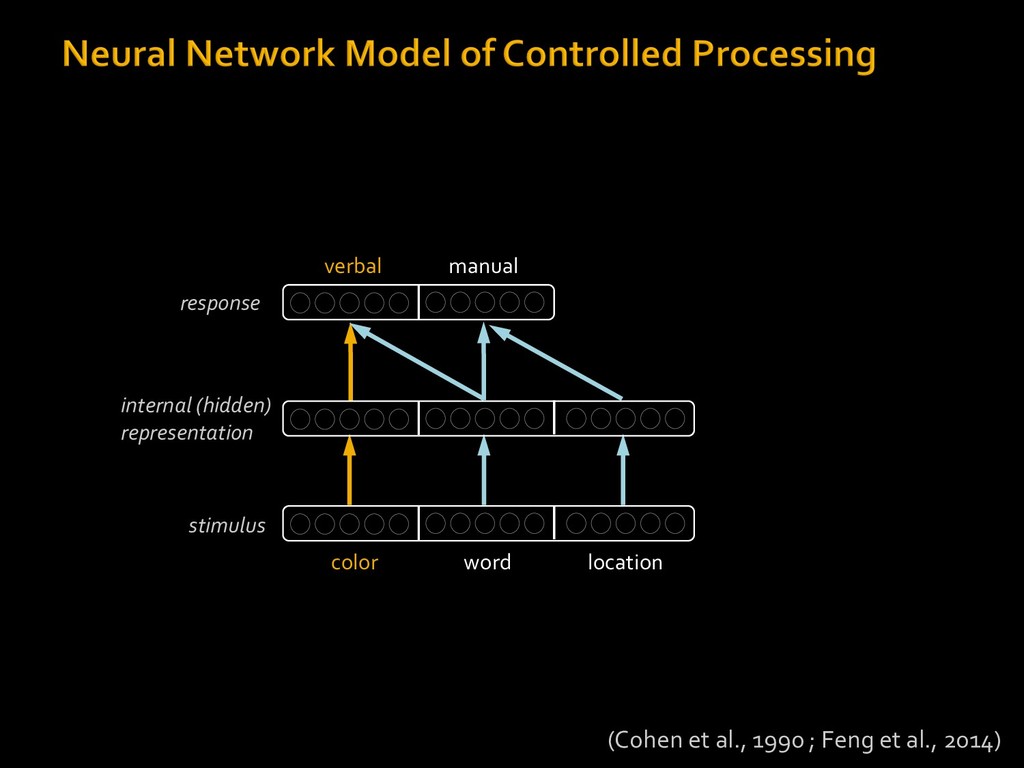
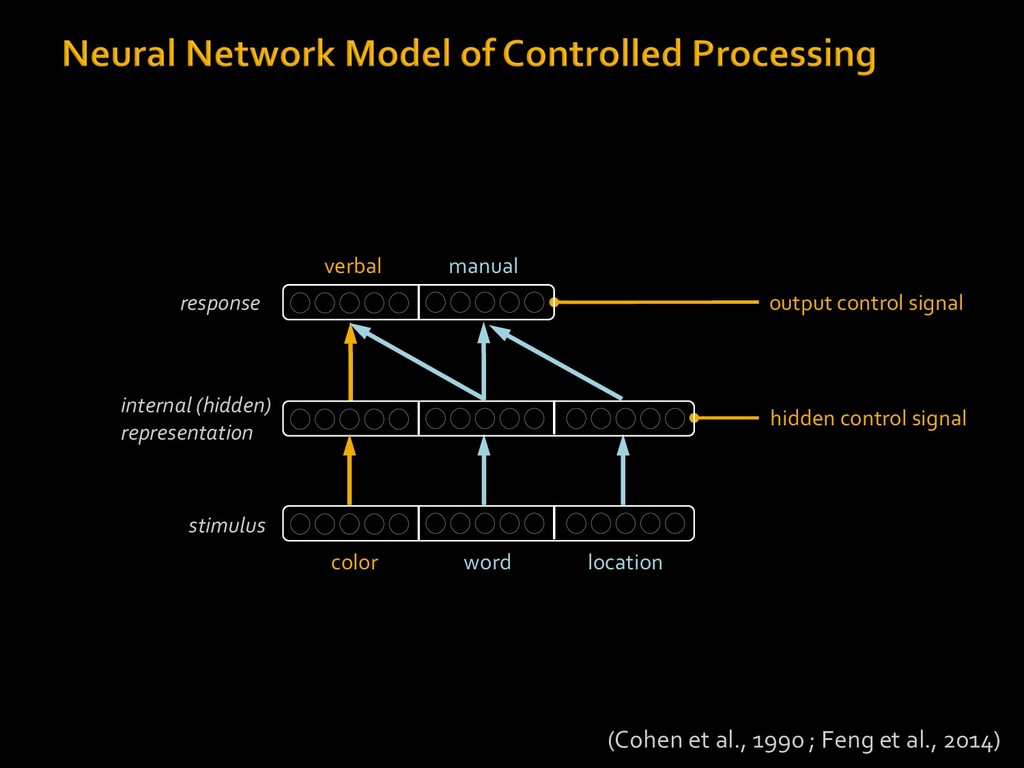
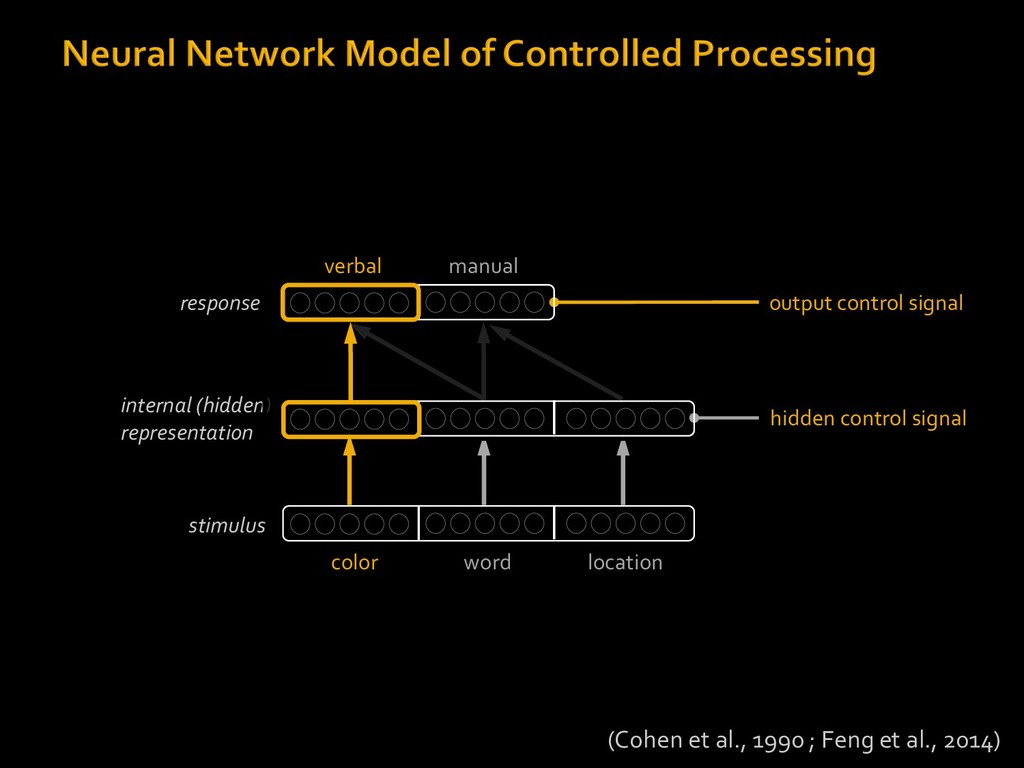
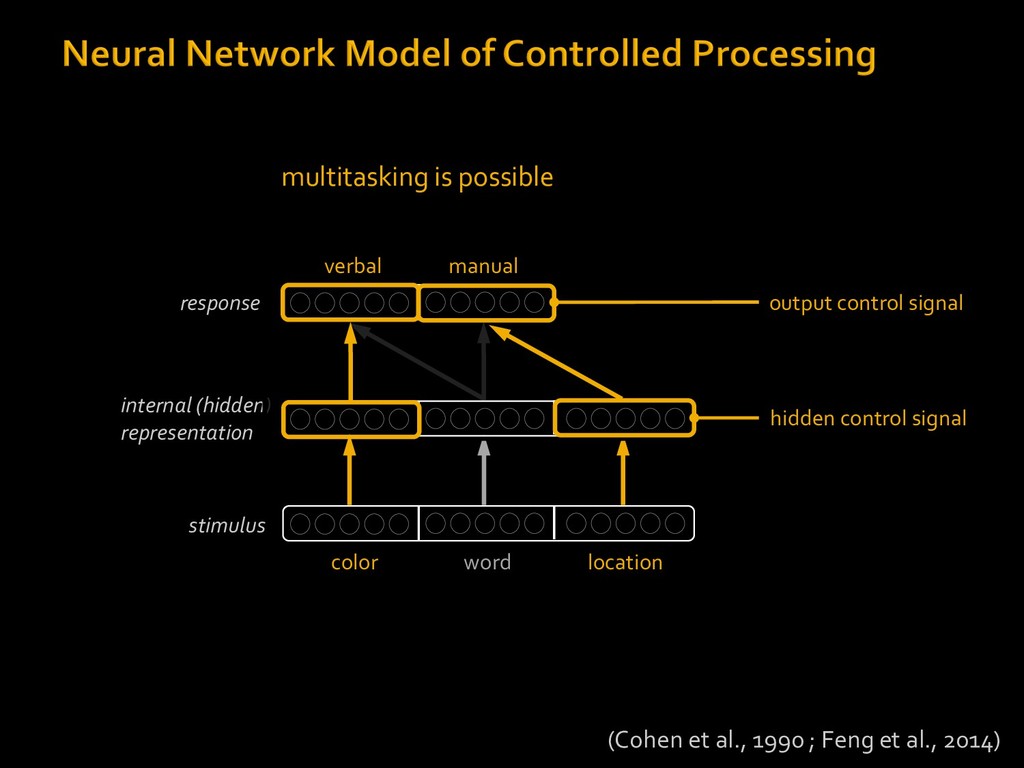
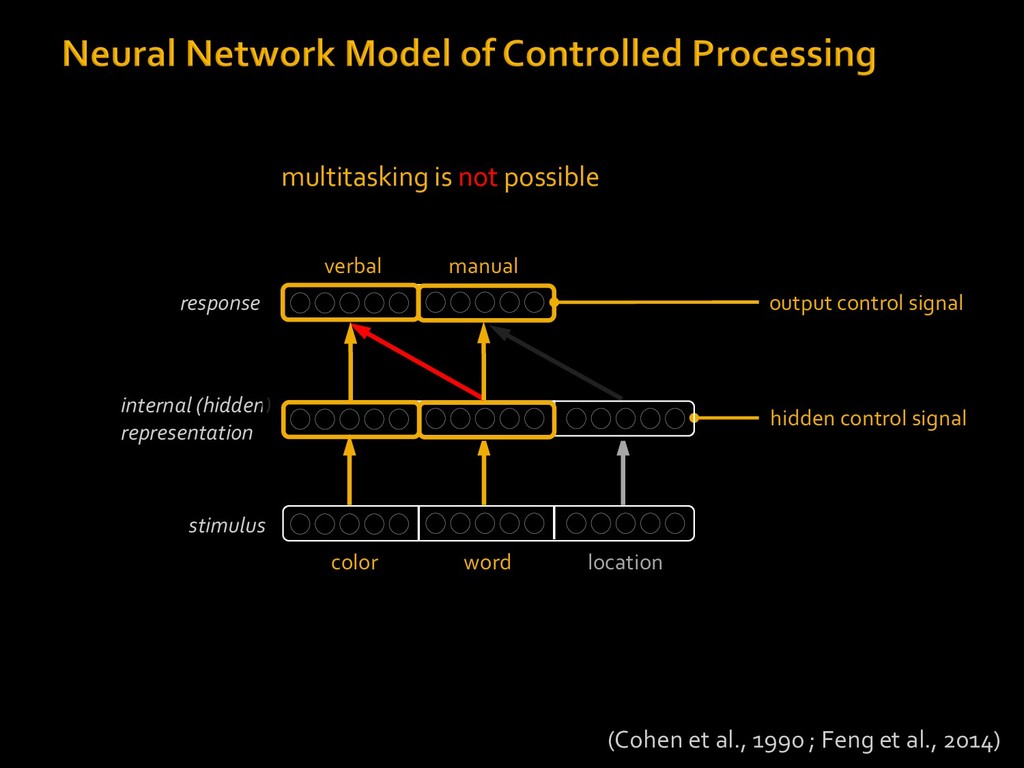
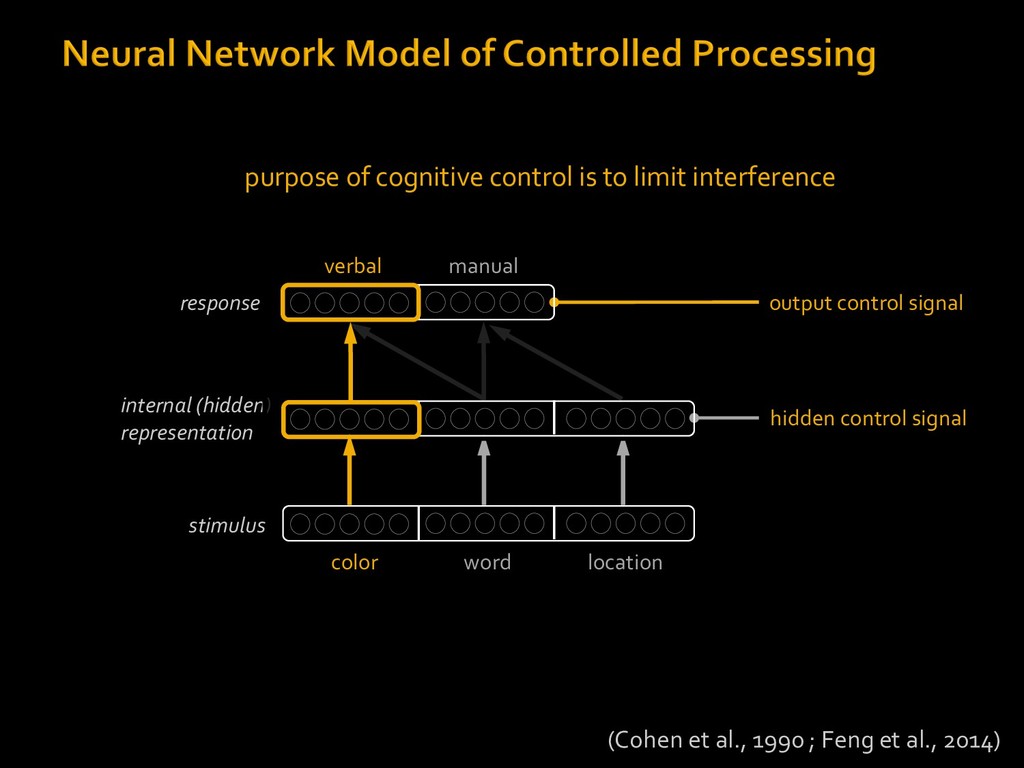
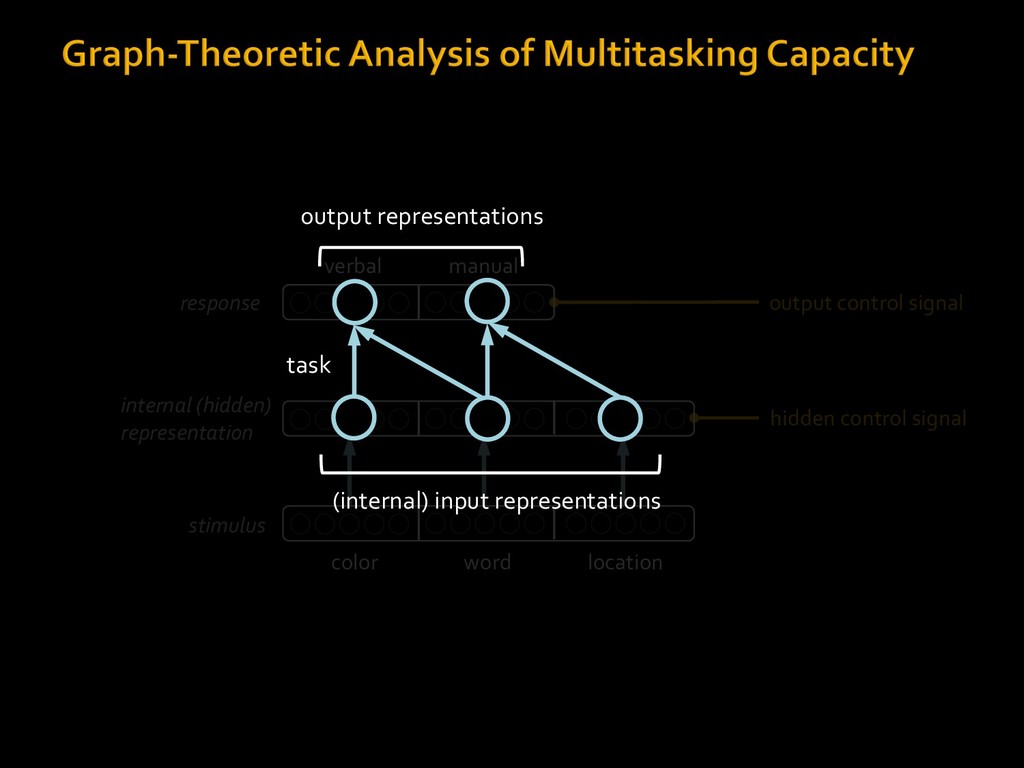
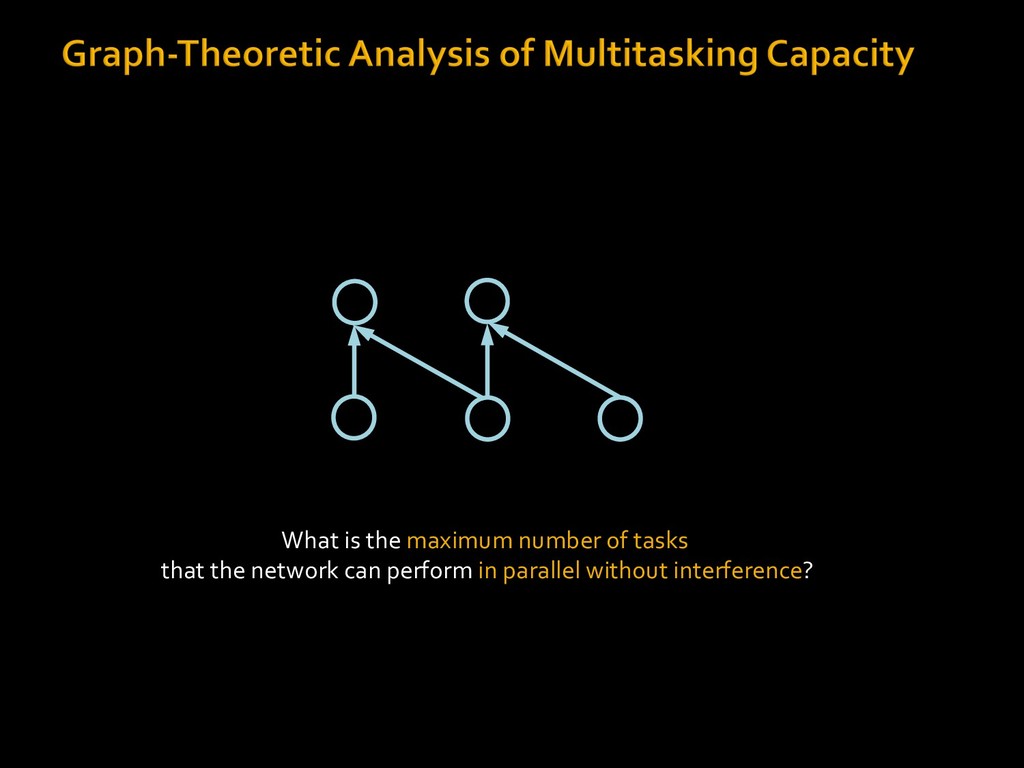
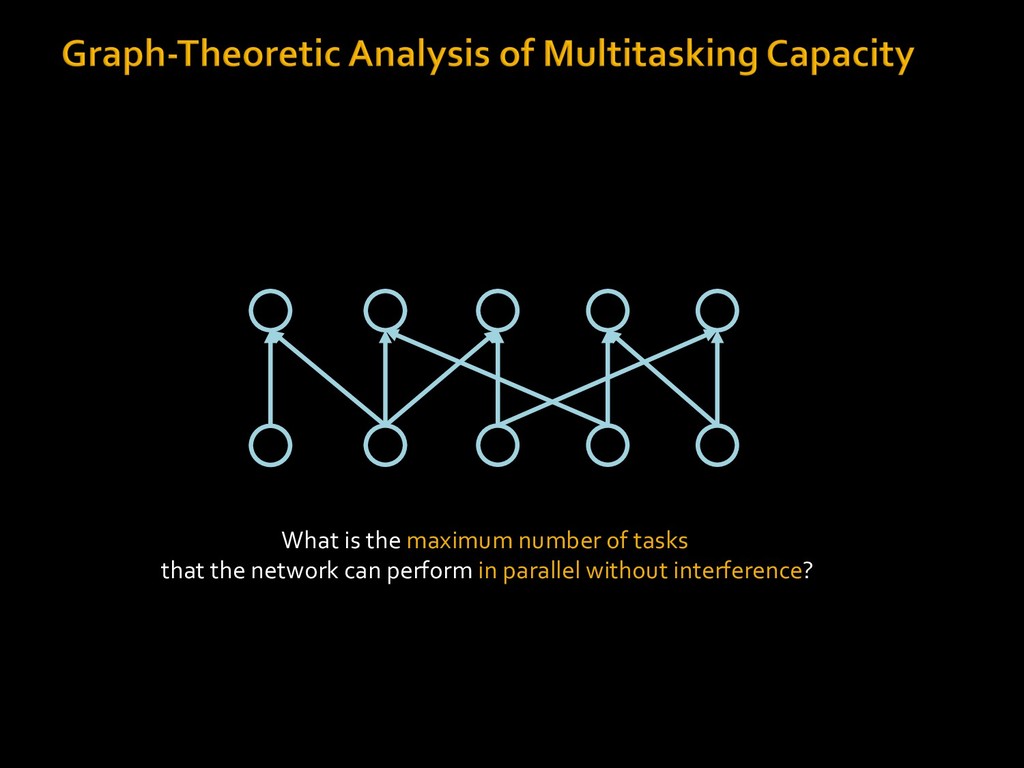
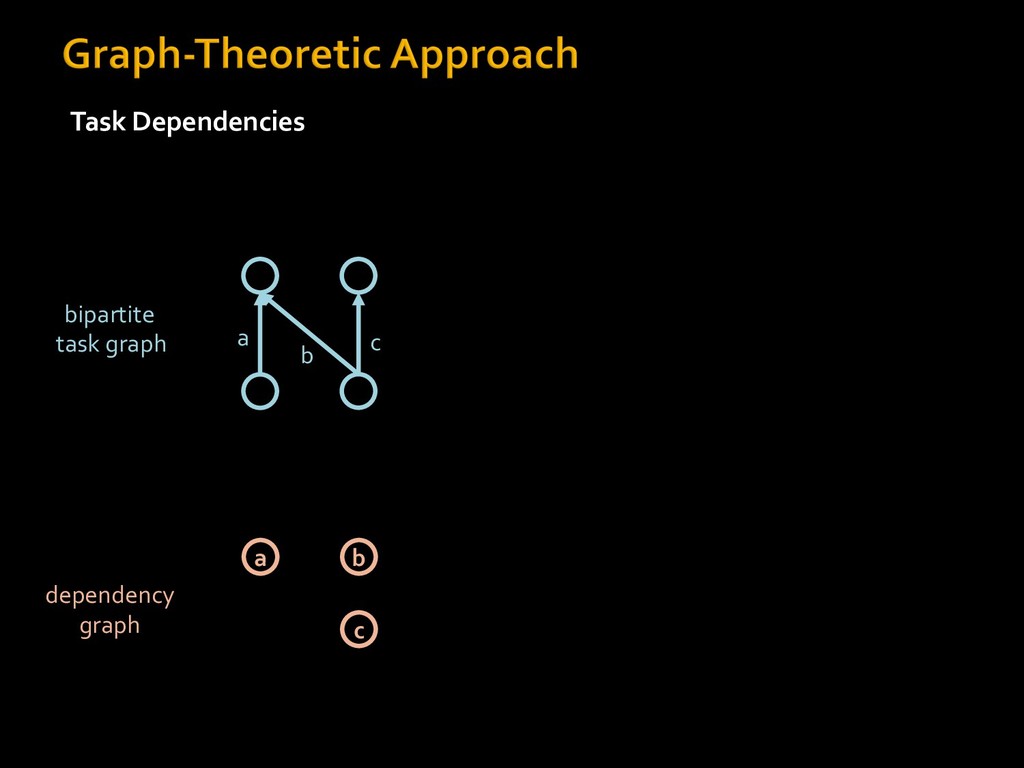
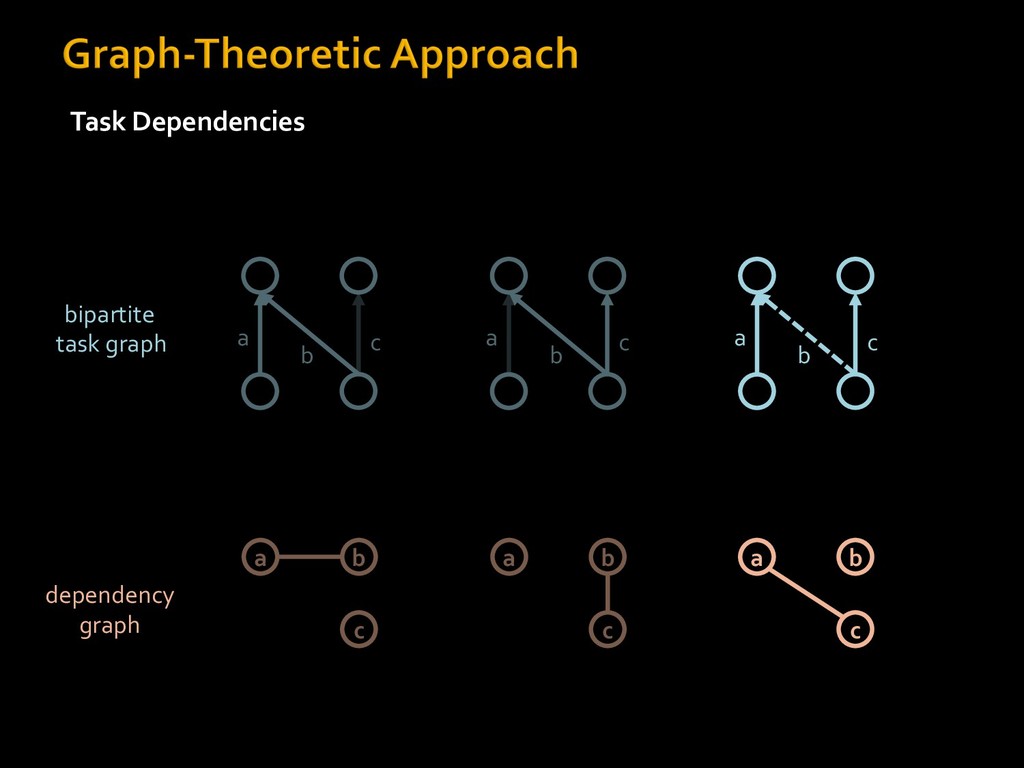
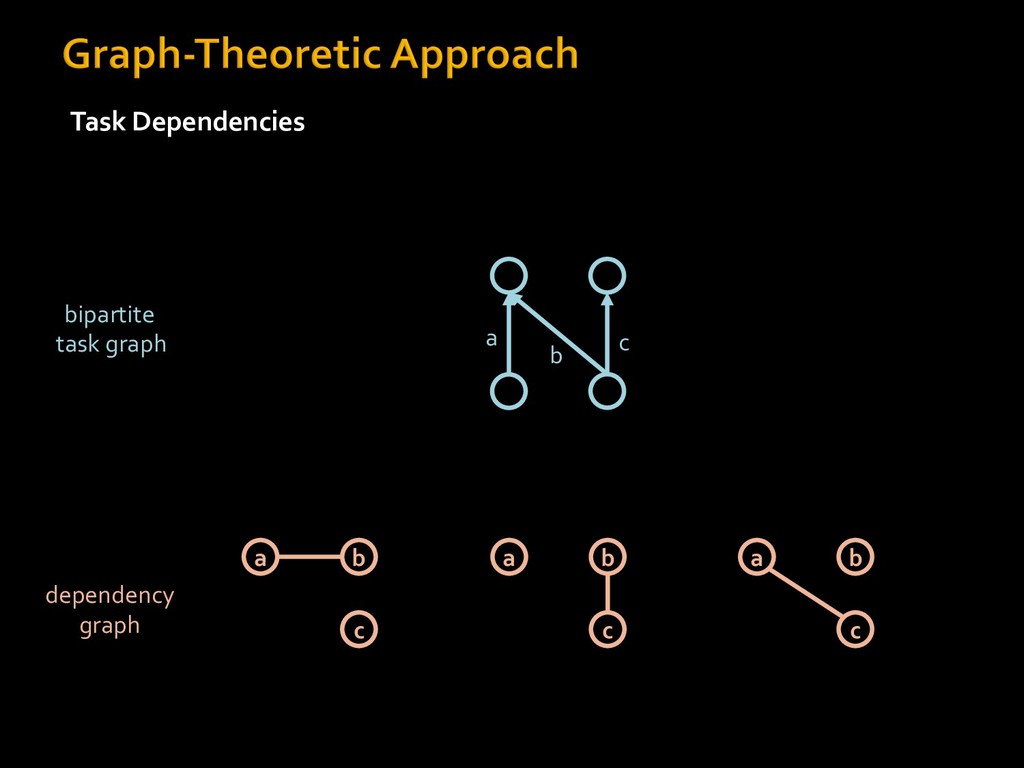
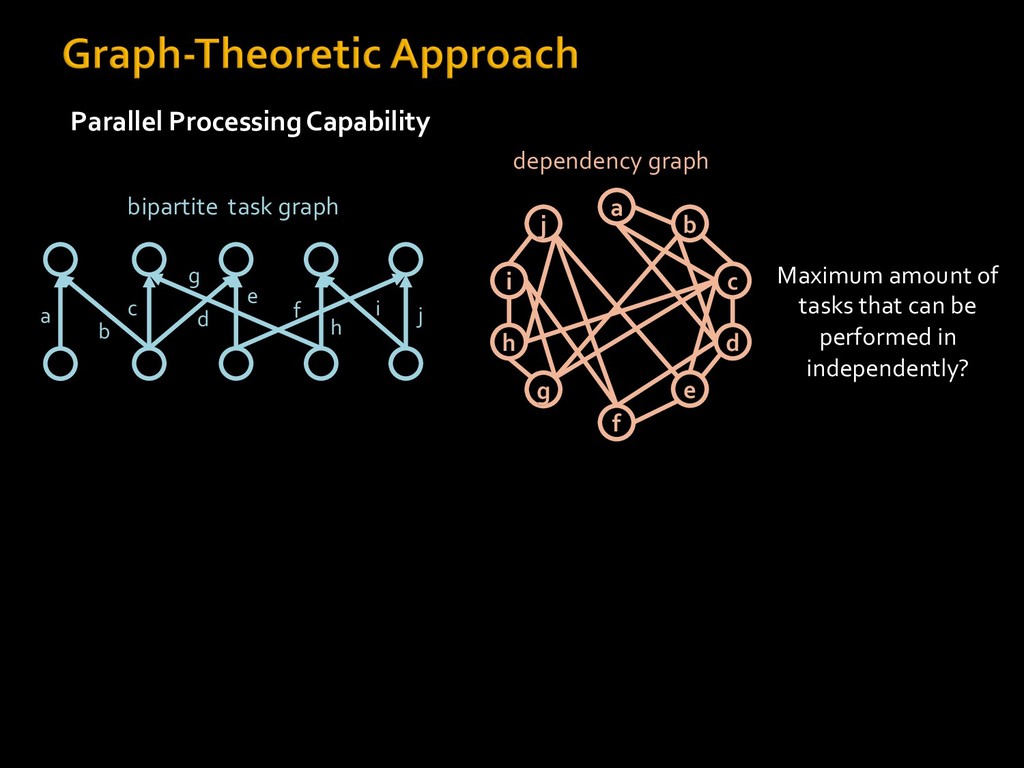
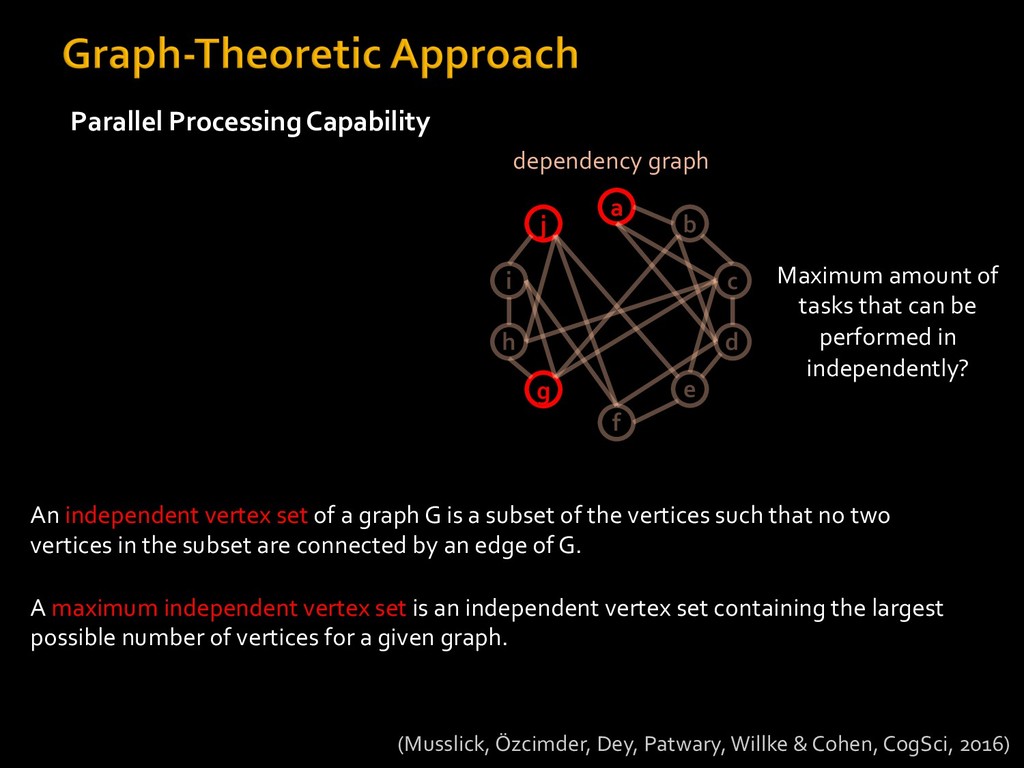
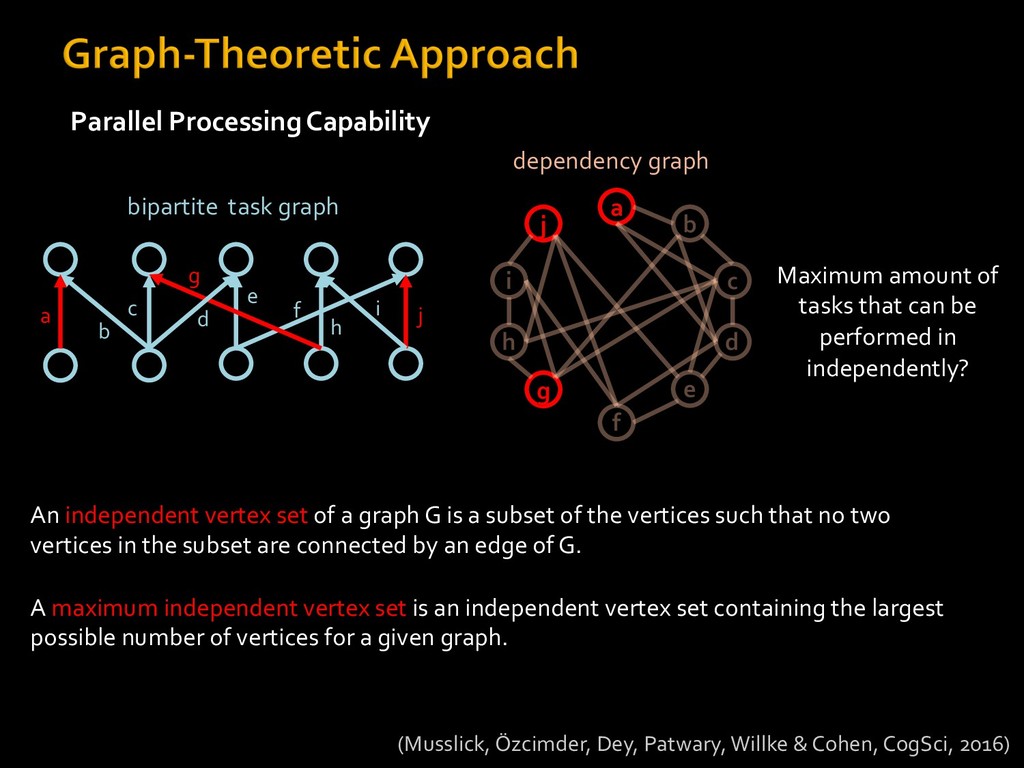
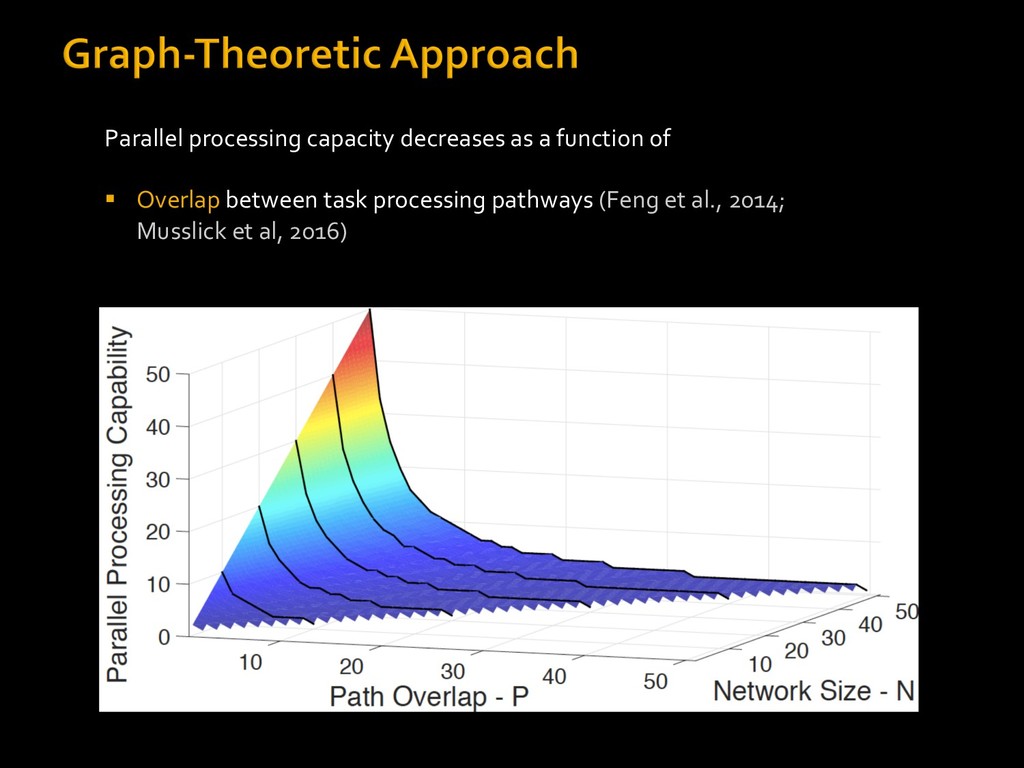
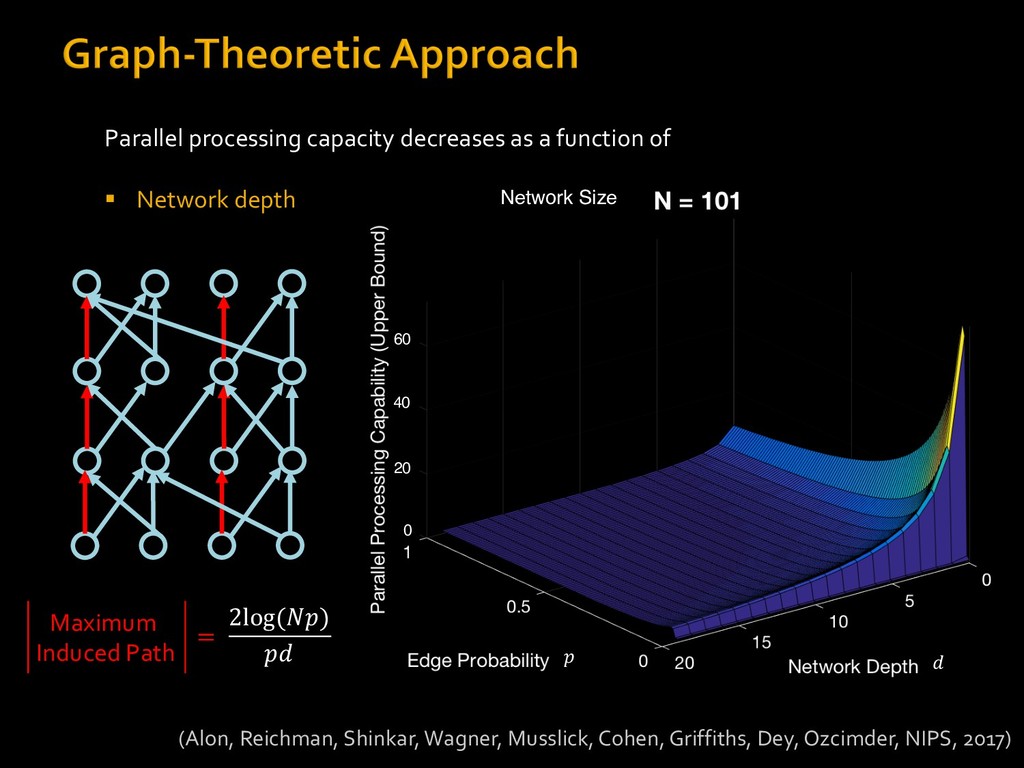
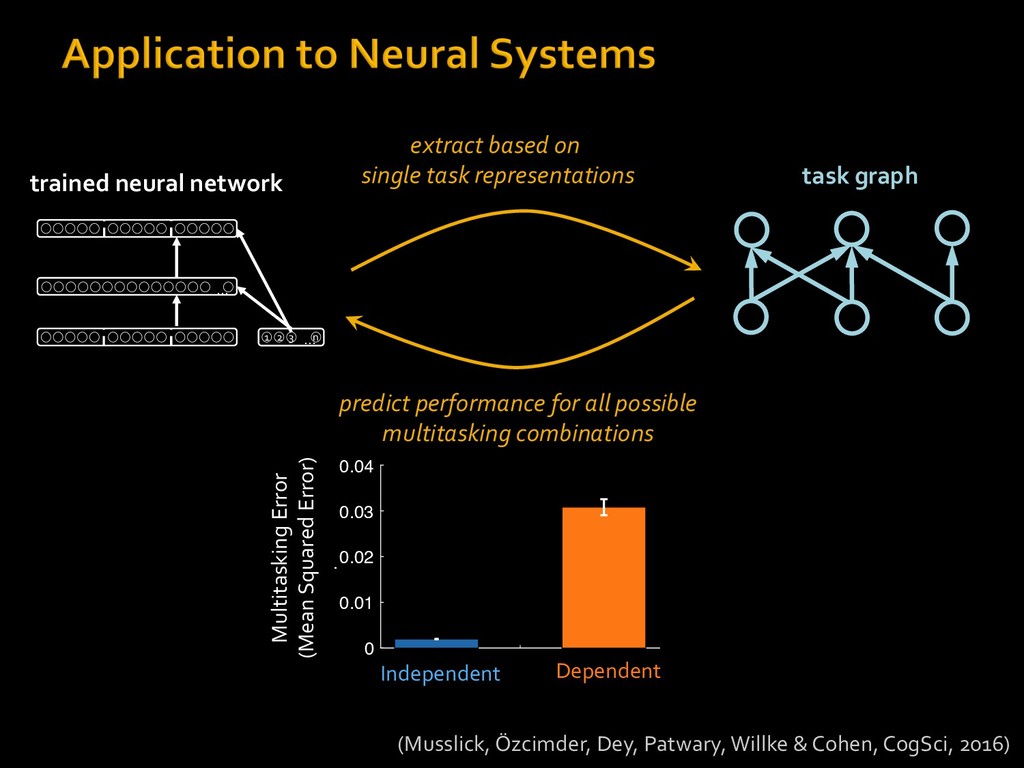
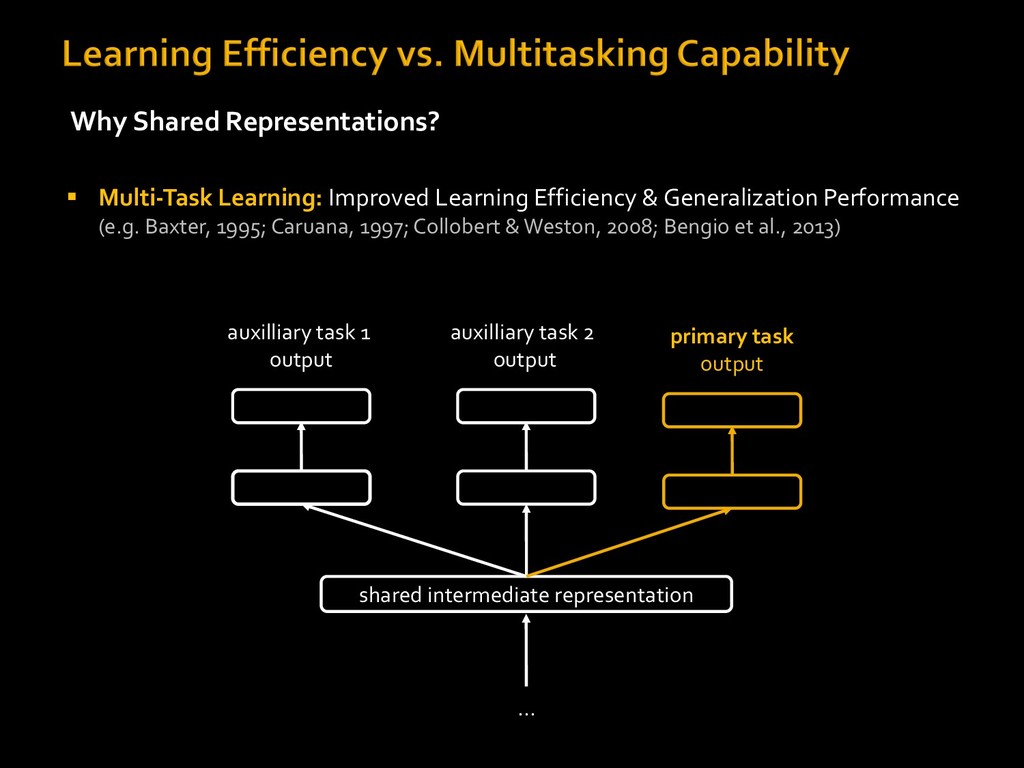
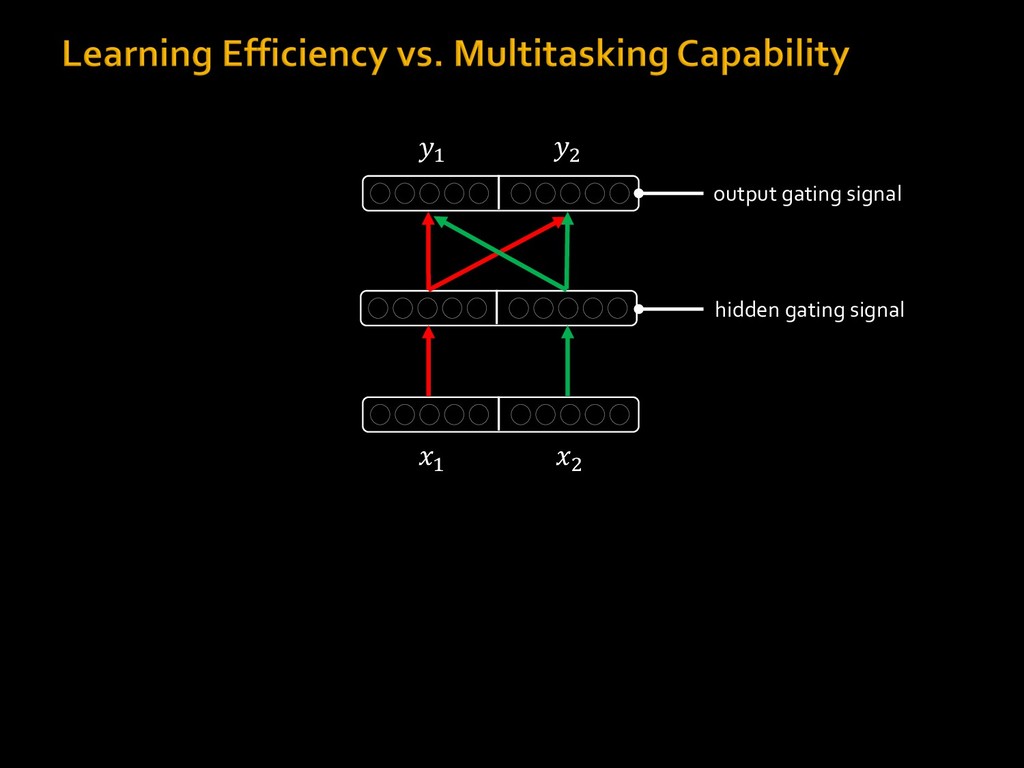
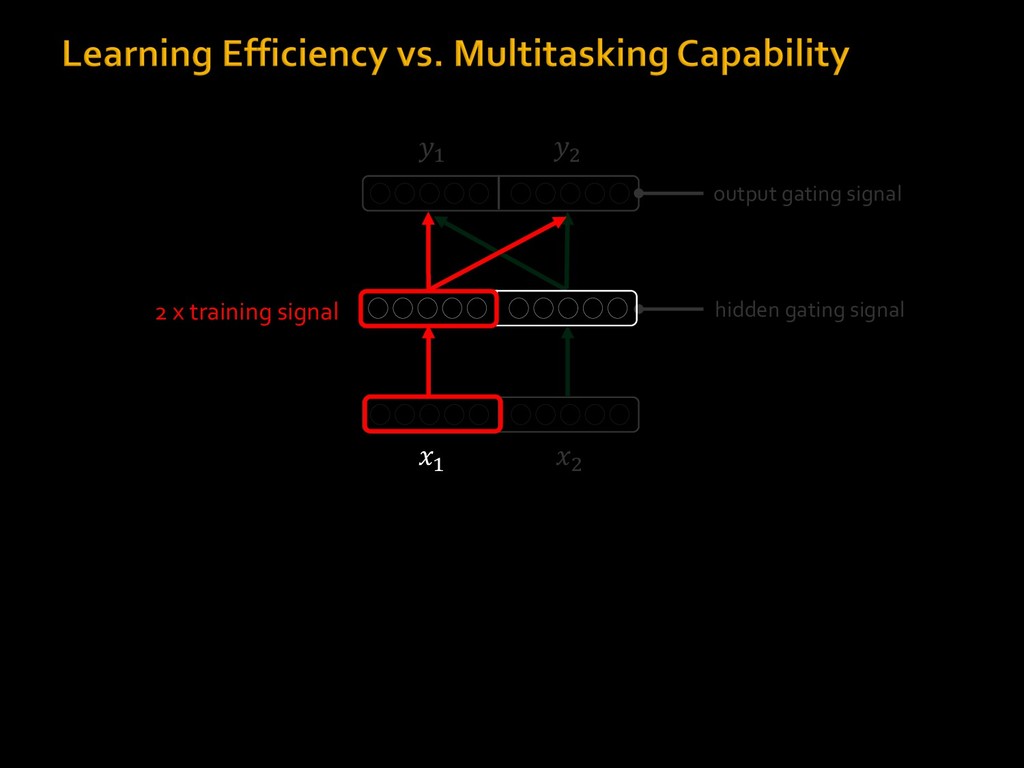
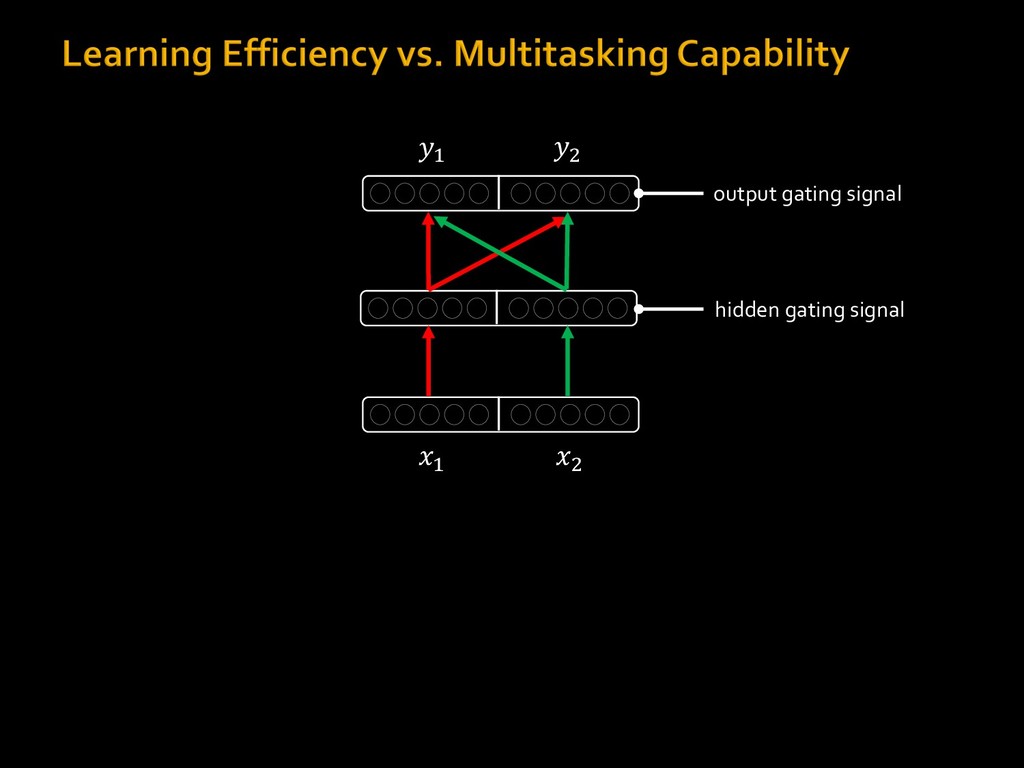
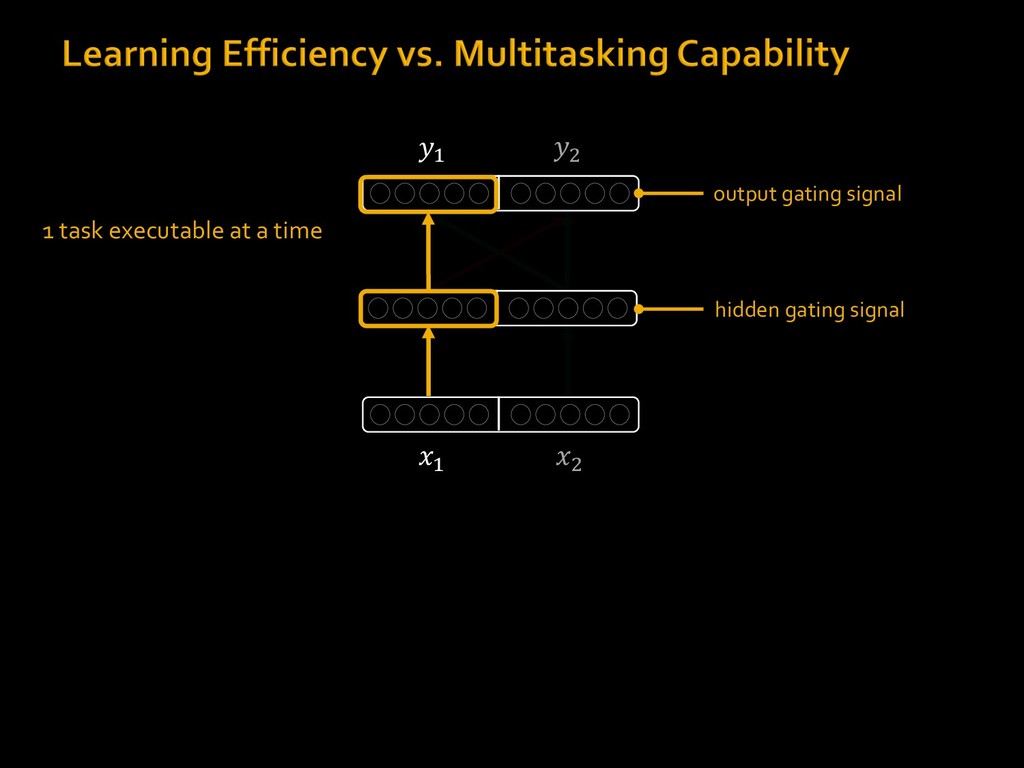
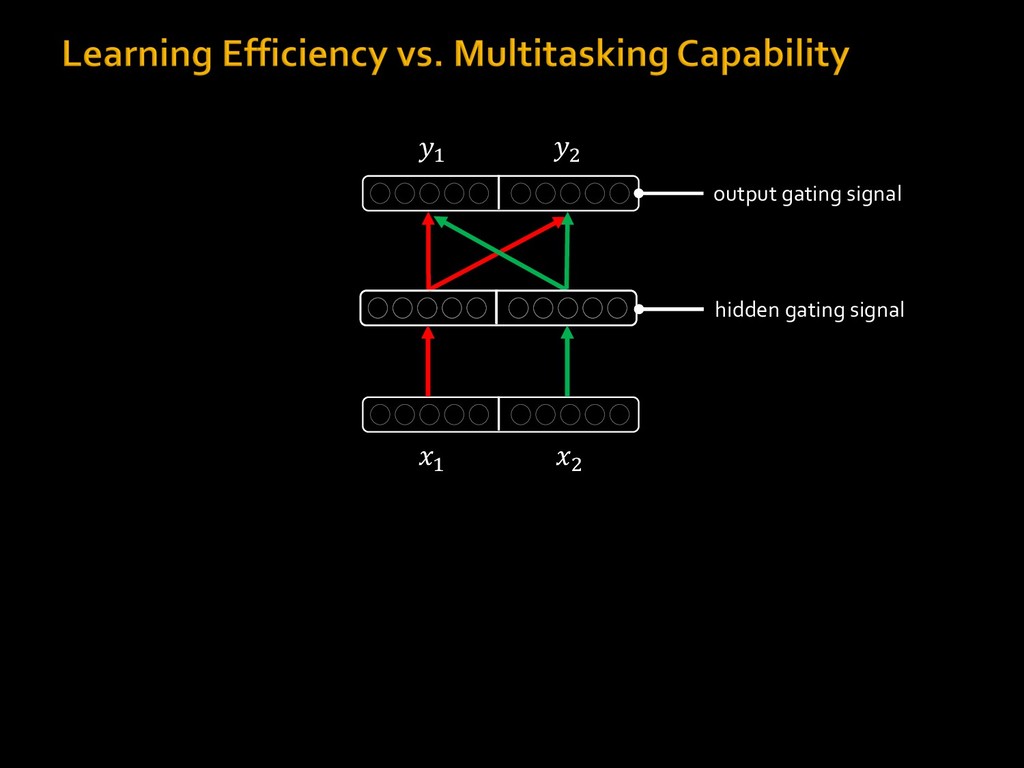
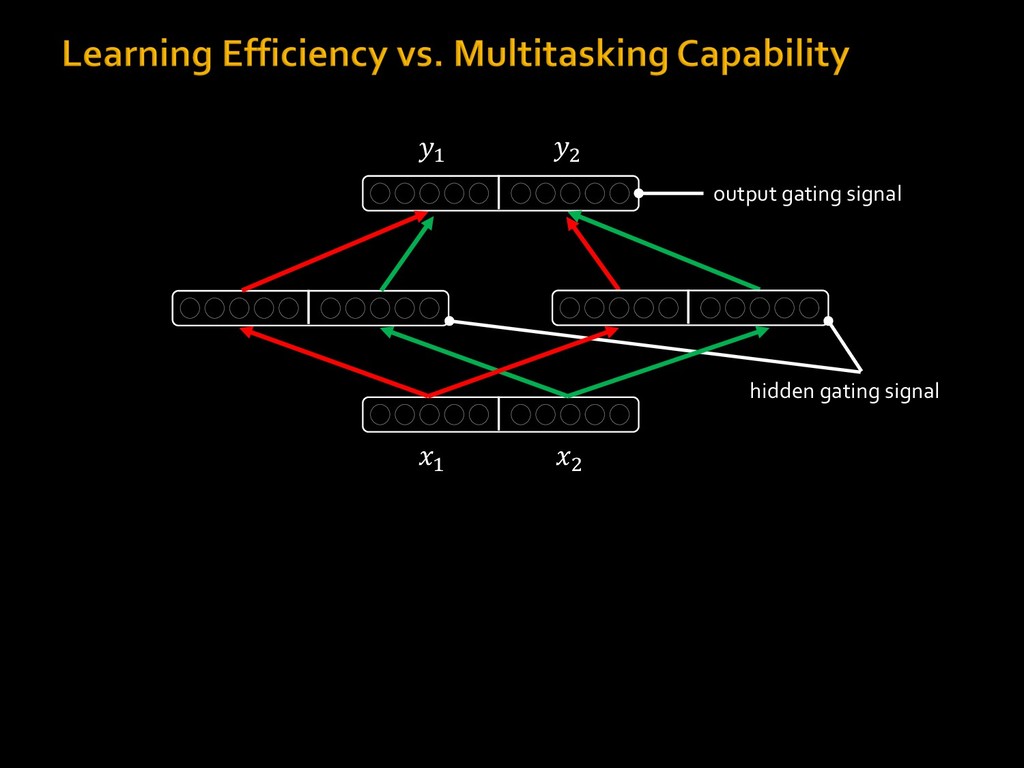
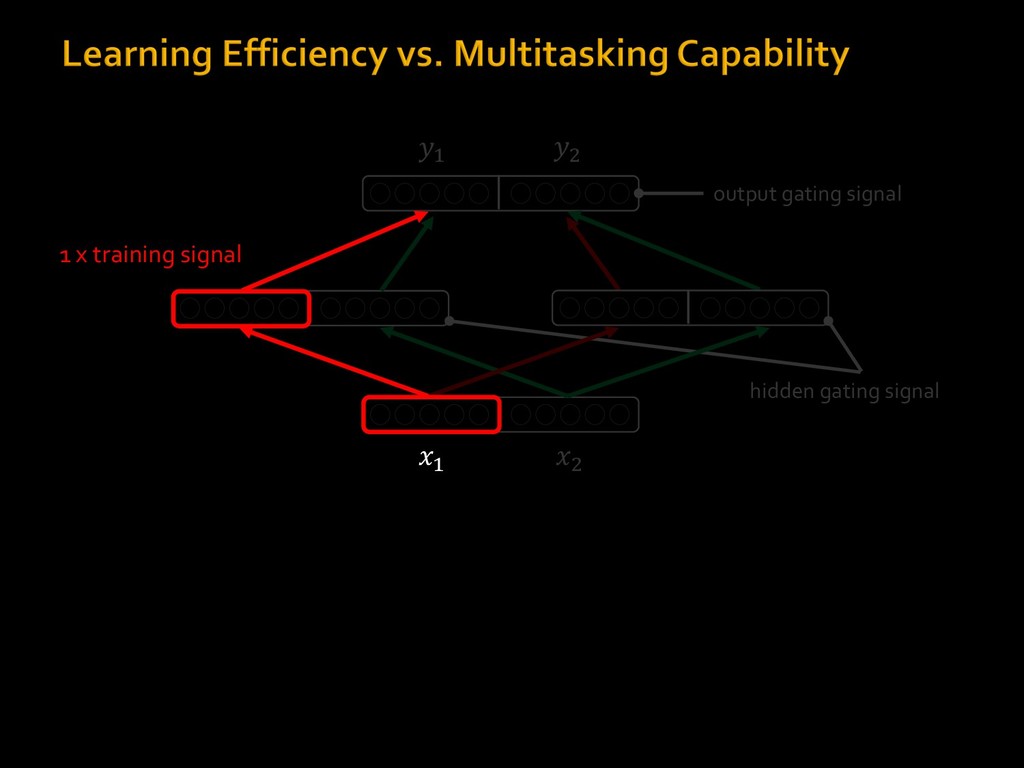
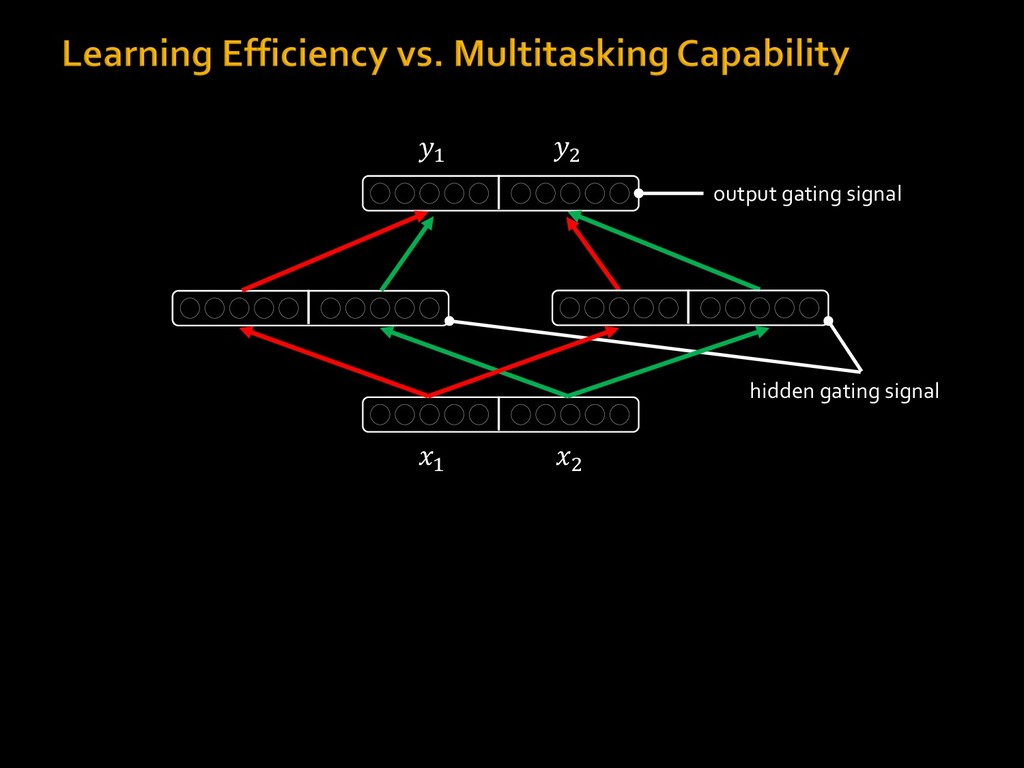
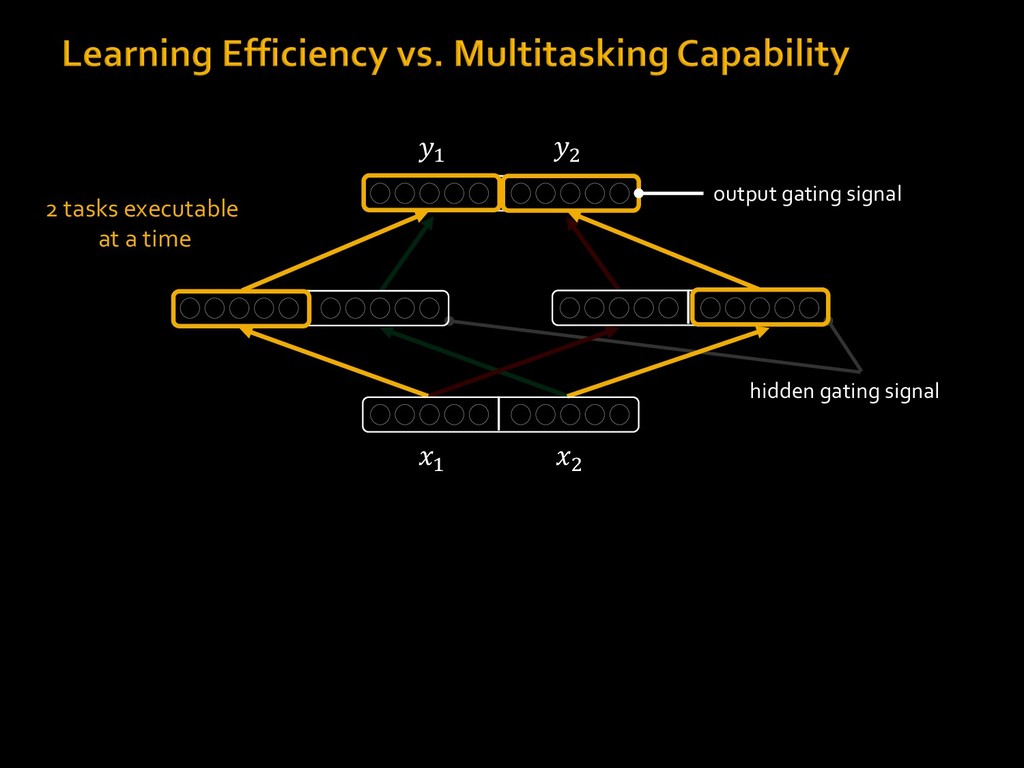
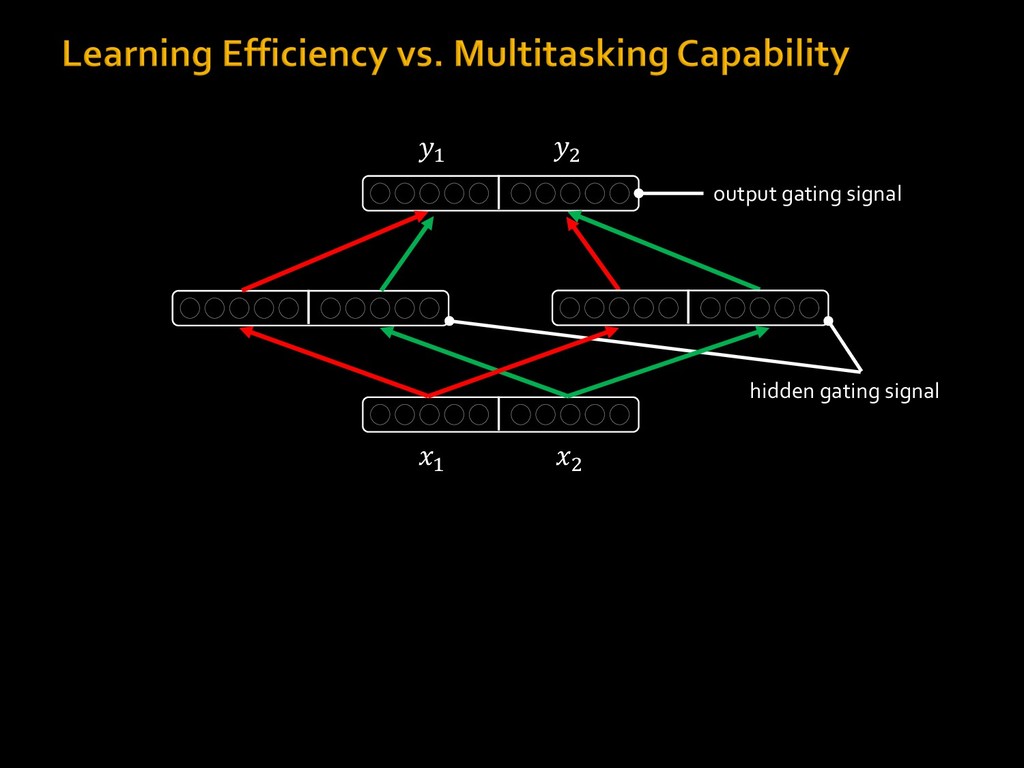
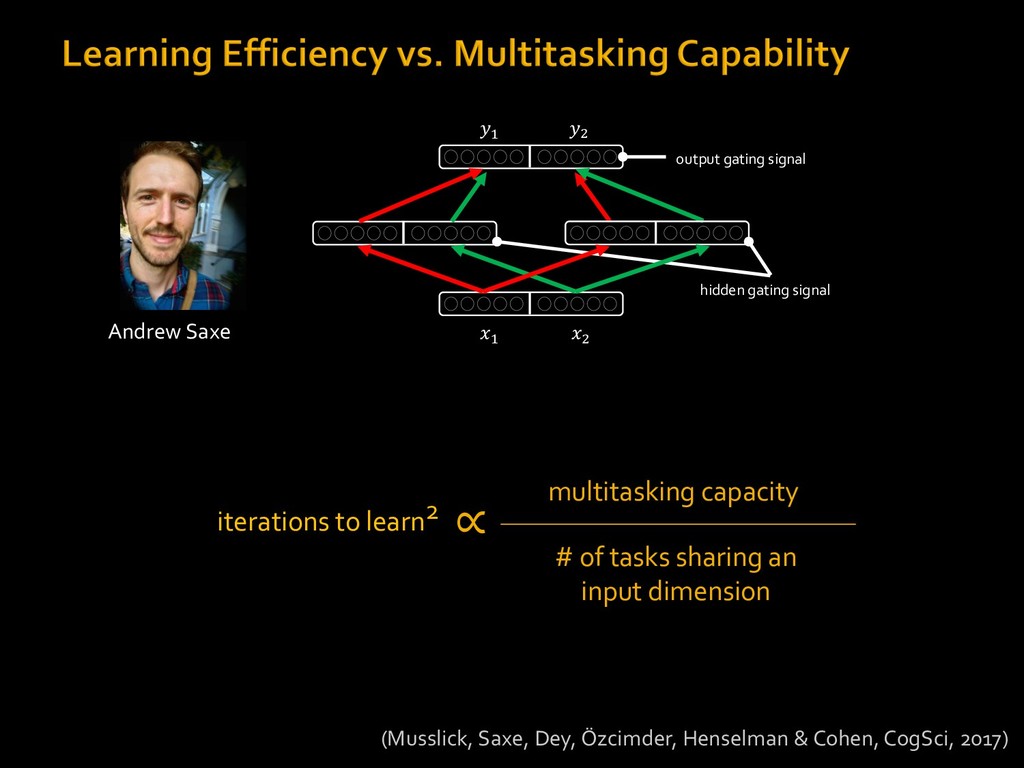
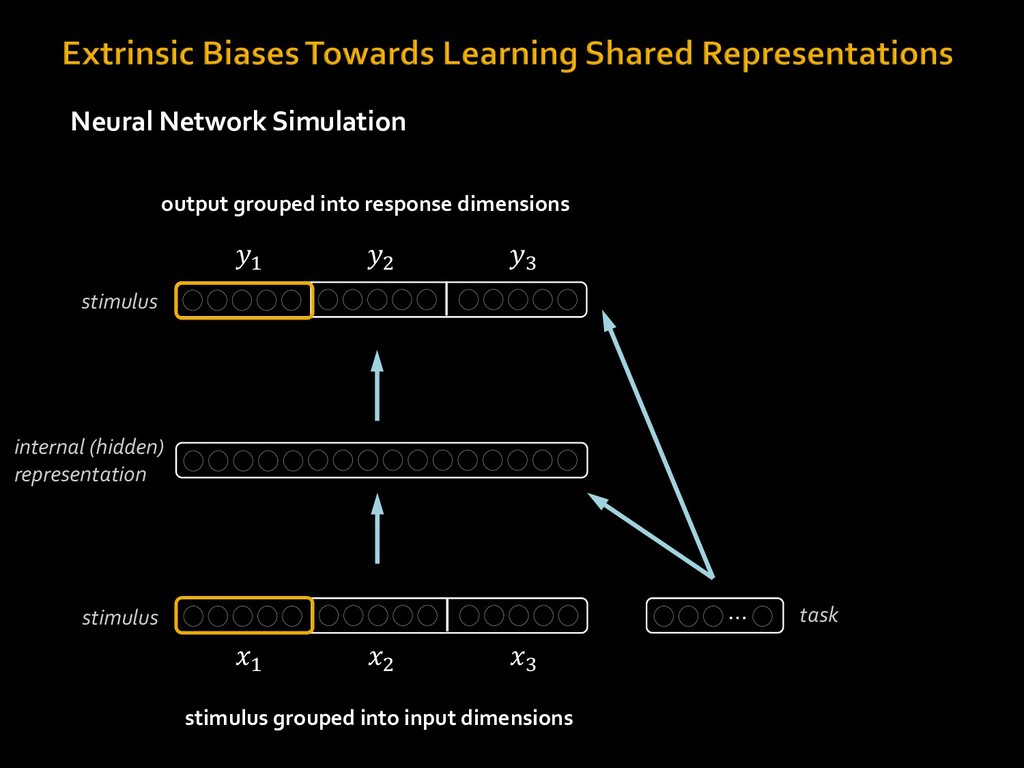
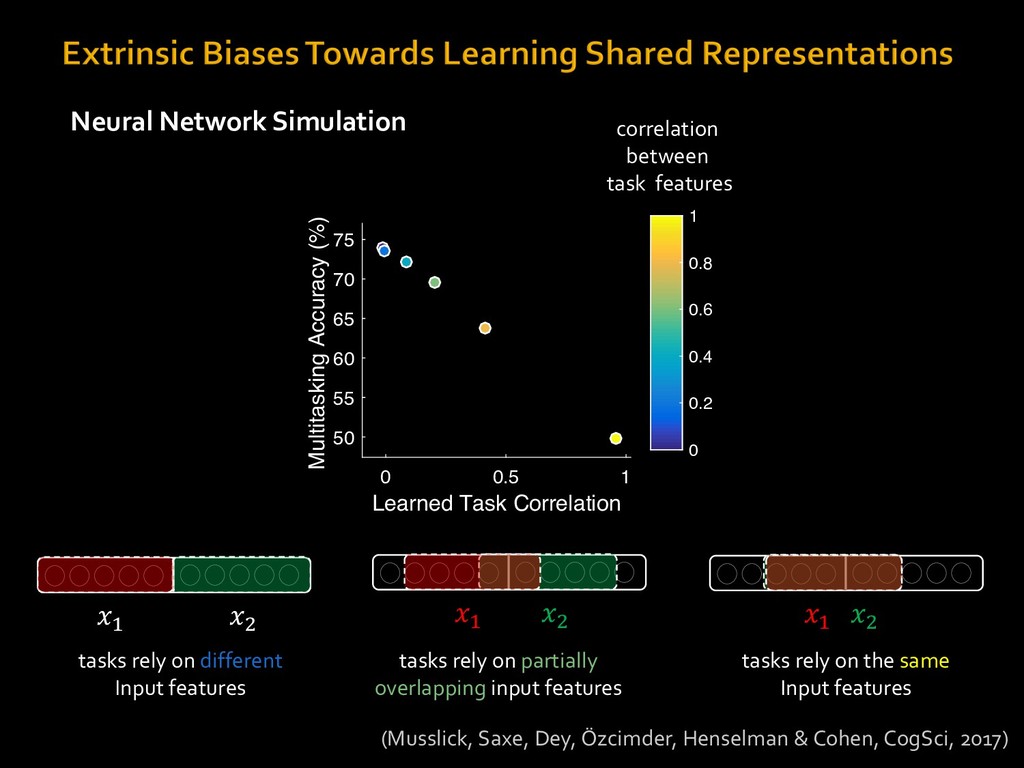
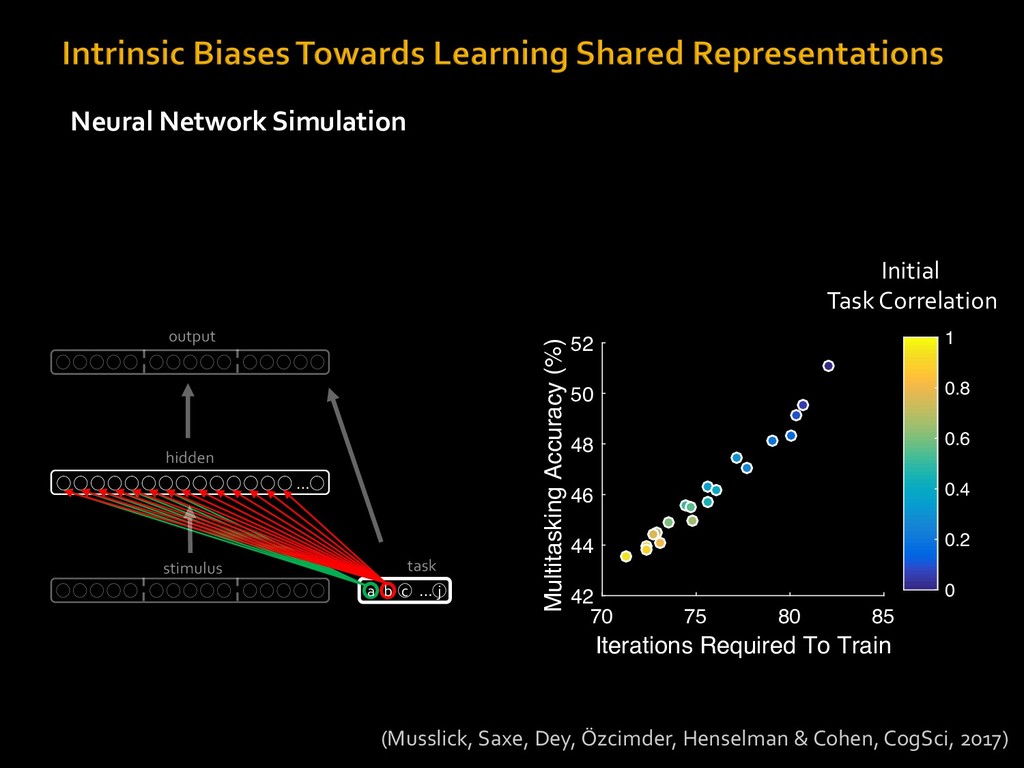
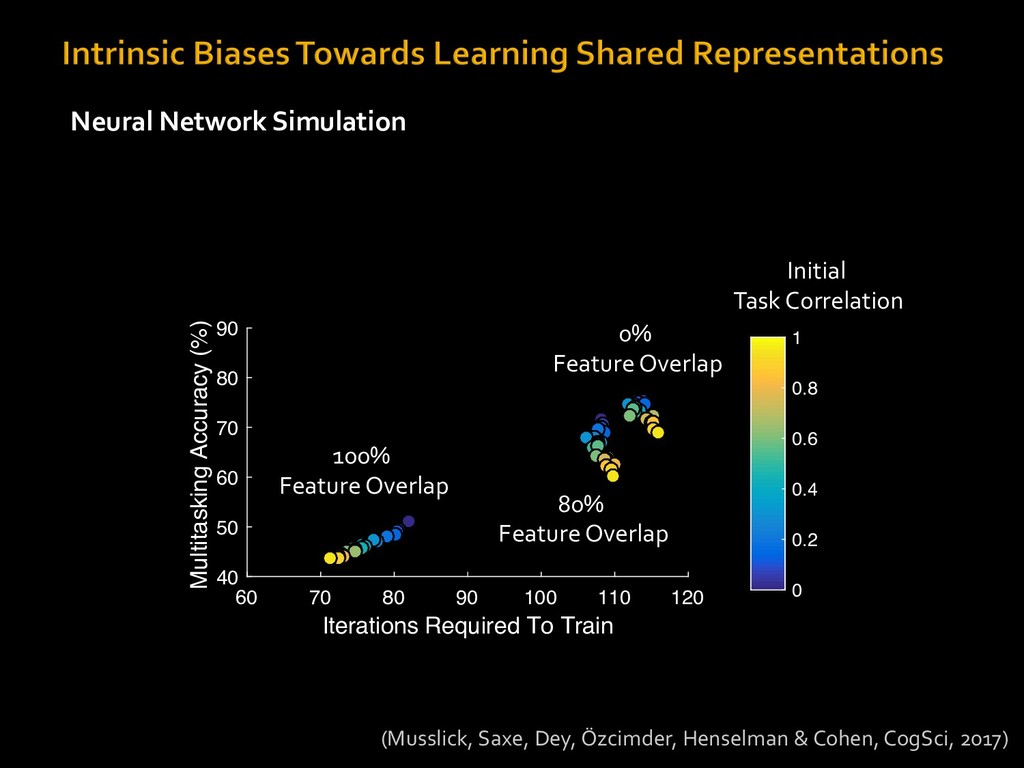
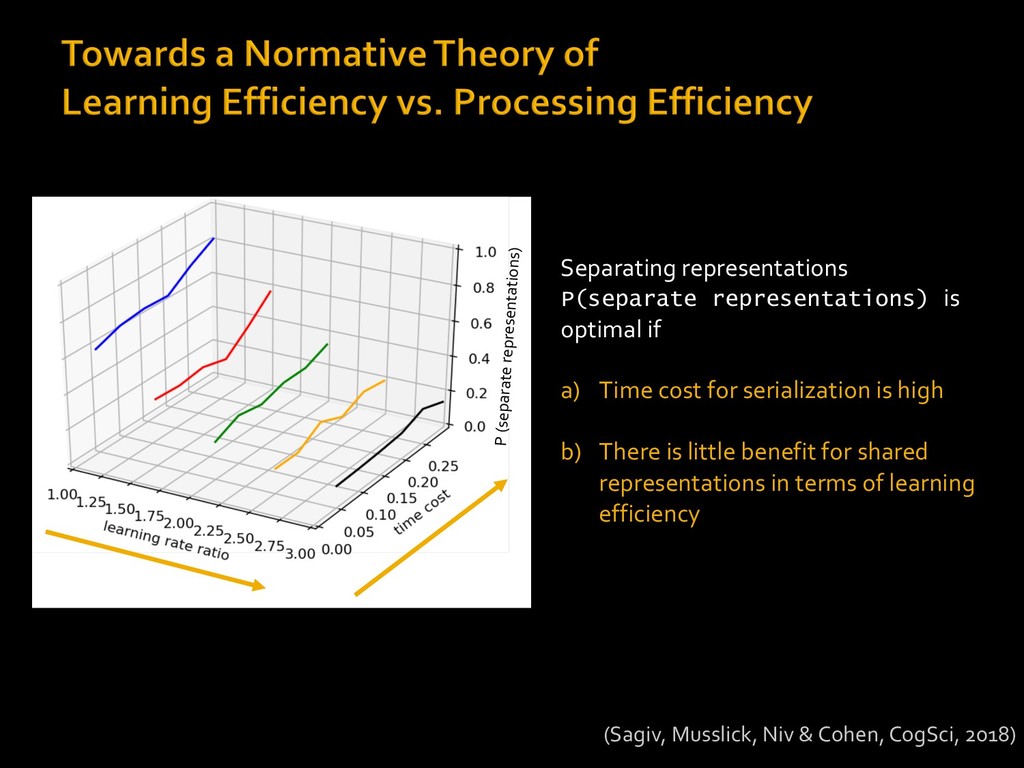
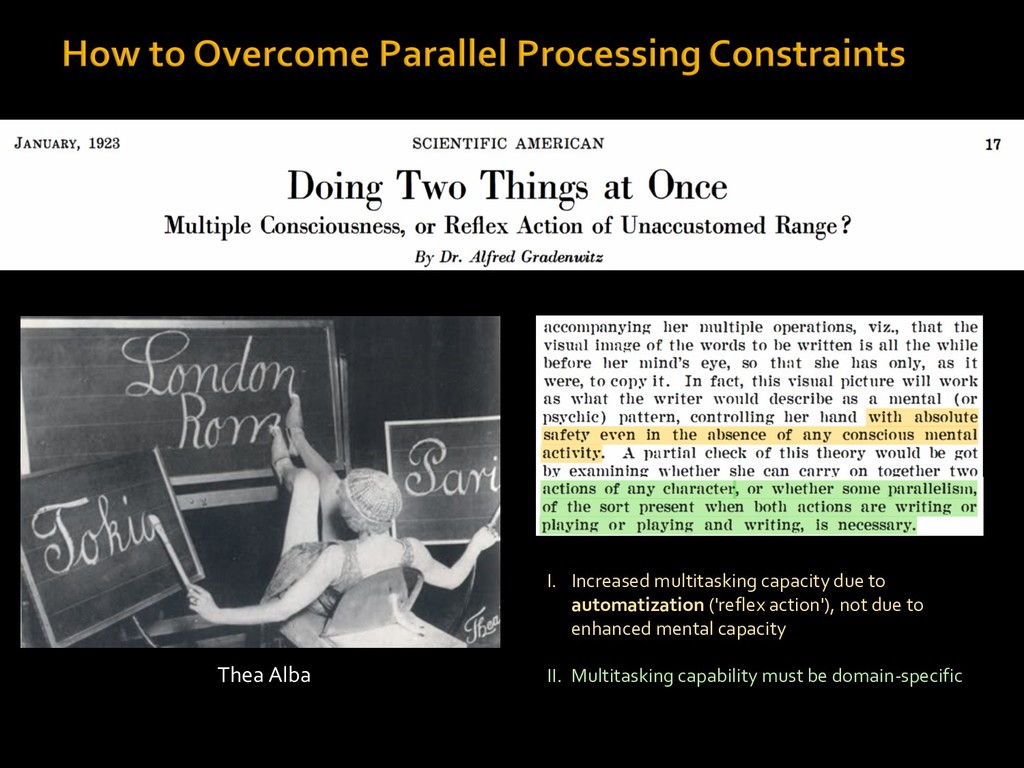
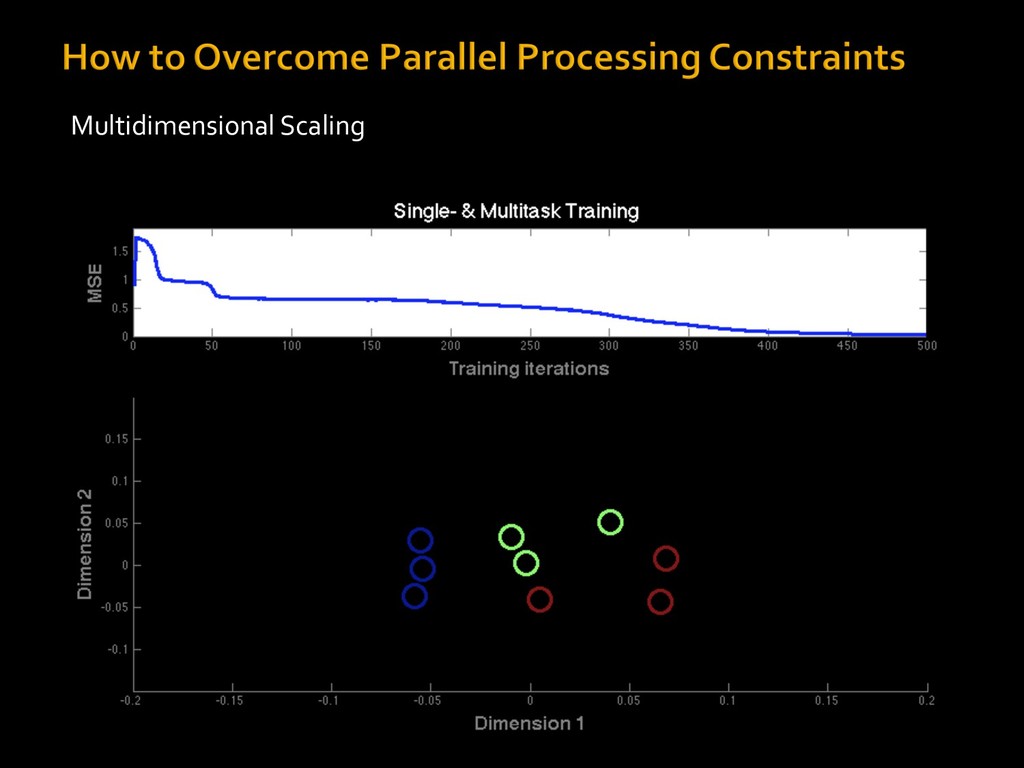
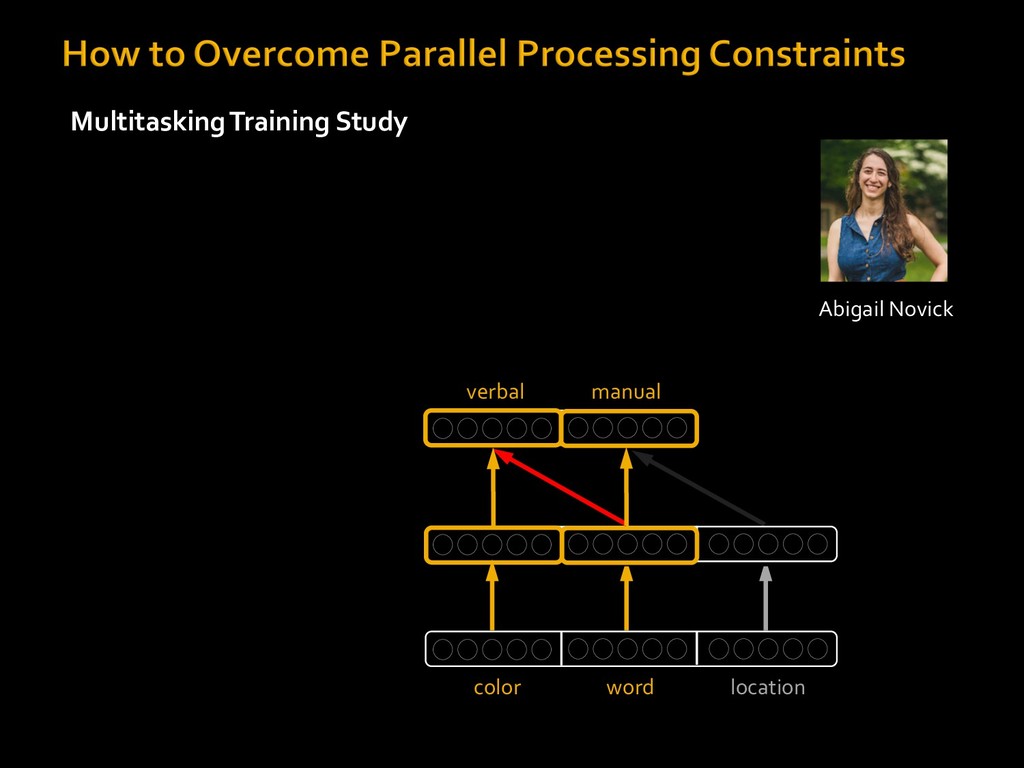
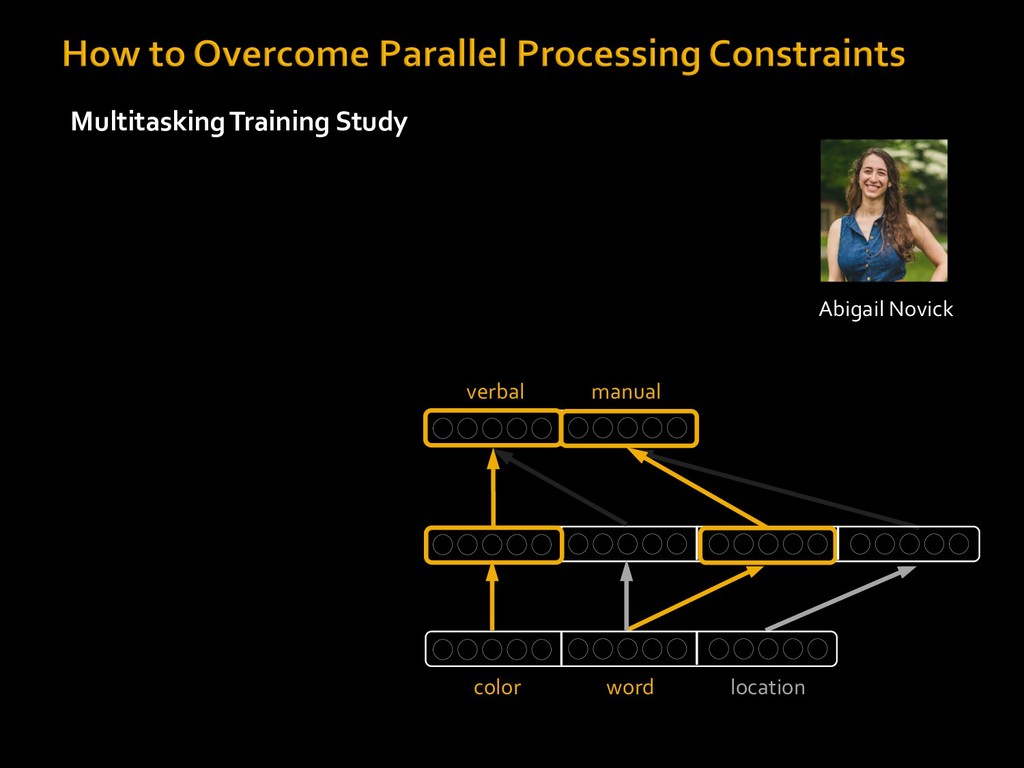
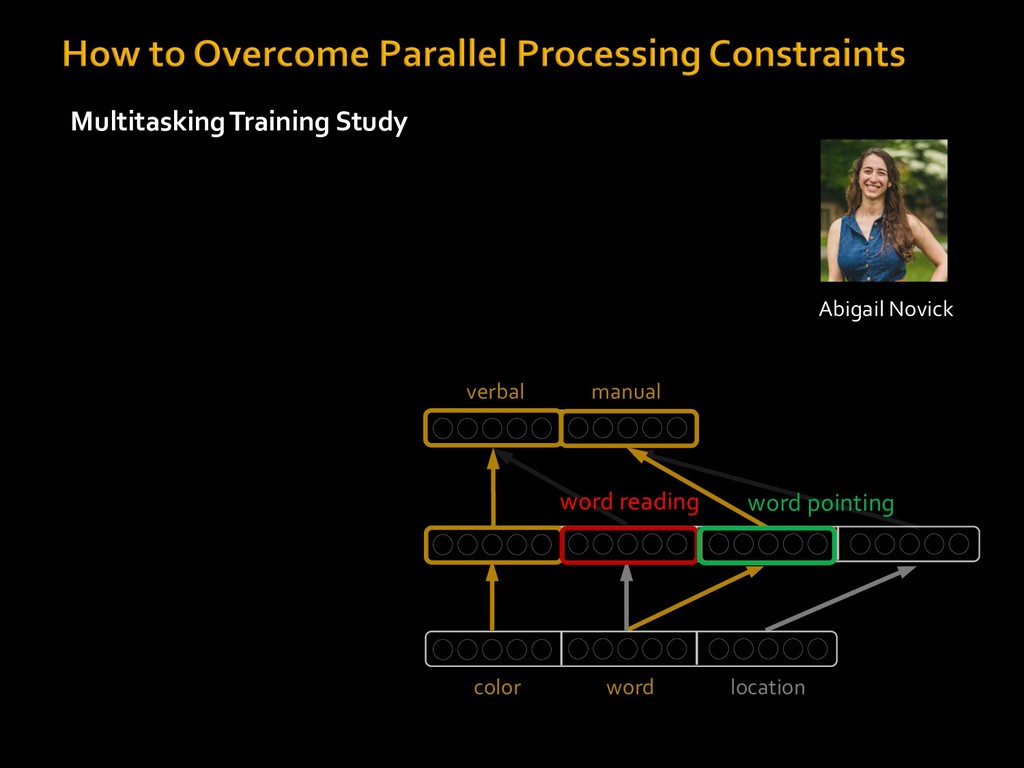
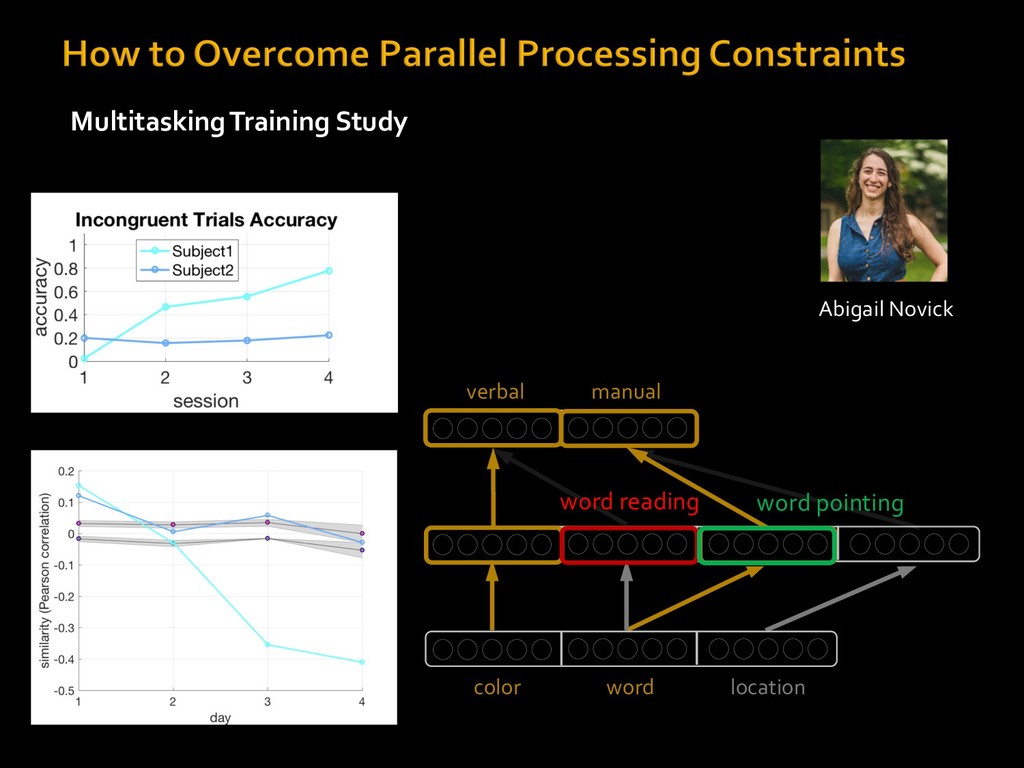
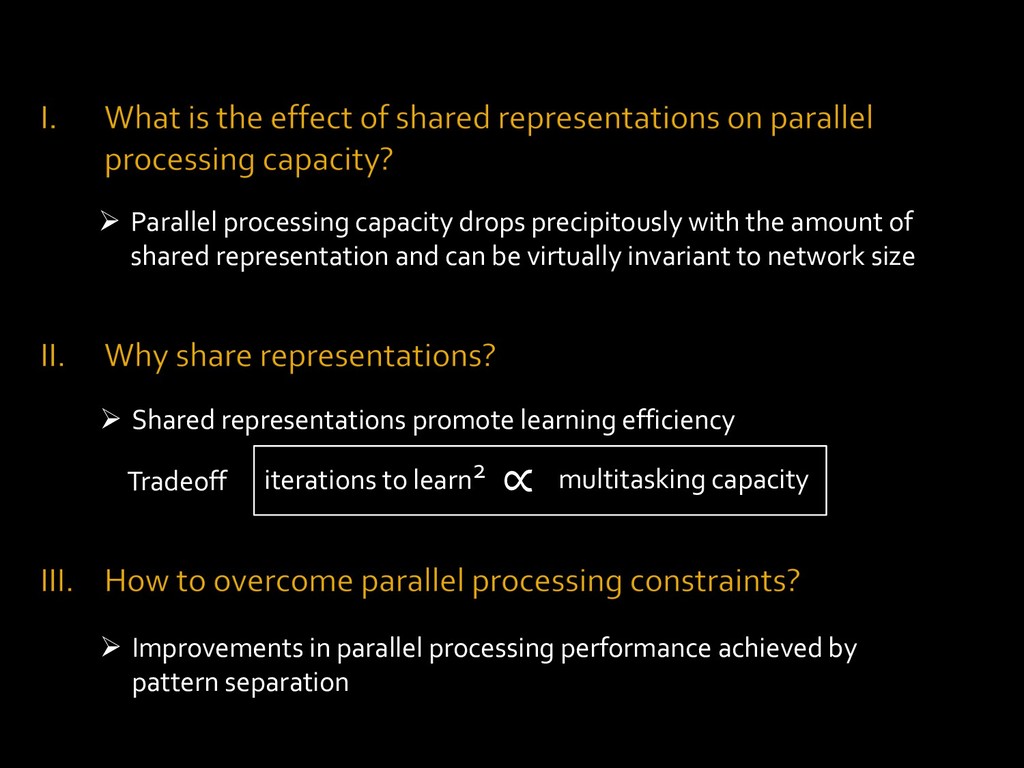
One of the most compelling characteristics of controlled processing is our limitation to exercise it. These limitations form one of the most basic and influential tenets of cognitive psychology: controlled processing relies on a central, limited capacity processing mechanism that imposes seriality on control-dependent processes. In the first part of this talk, I present a challenge to this view that distinguishes control-dependent and automatic processing by their reliance on shared vs. separated (task-dedicated) representations. Specifically, I propose that control functions to avert conflicting use of representations shared by multiple processes. That is, constraints on the use of control arise as a rational response to the shared use of representations, rather than from the control mechanism itself. I use graph-theoretic methods to formalize this theory, and show that multitasking capability of a network architecture drops precipitously with an increase in shared representations, and is virtually invariant to network size. This raises an important question: insofar as shared representation introduces the risk of cross-talk and thereby limitations in multitasking, why would the brain prefer shared task representations over separate ones? In computational simulations and behavioral experiments I demonstrate a tradeoff between learning efficiency, promoted by shared representations, and multitasking capability, best achieved via separated representations. The commonly-observed trajectory from controlled to automatic processing during learning may therefore reflect a rational optimization of this tradeoff: shared representations initially afford a bias toward efficient learning in novel task environments at the expense of seriality and control-dependence; but experience in environments where multitasking affords sufficient advantage ultimately promotes acquisition of separated, task-dedicated representations.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}