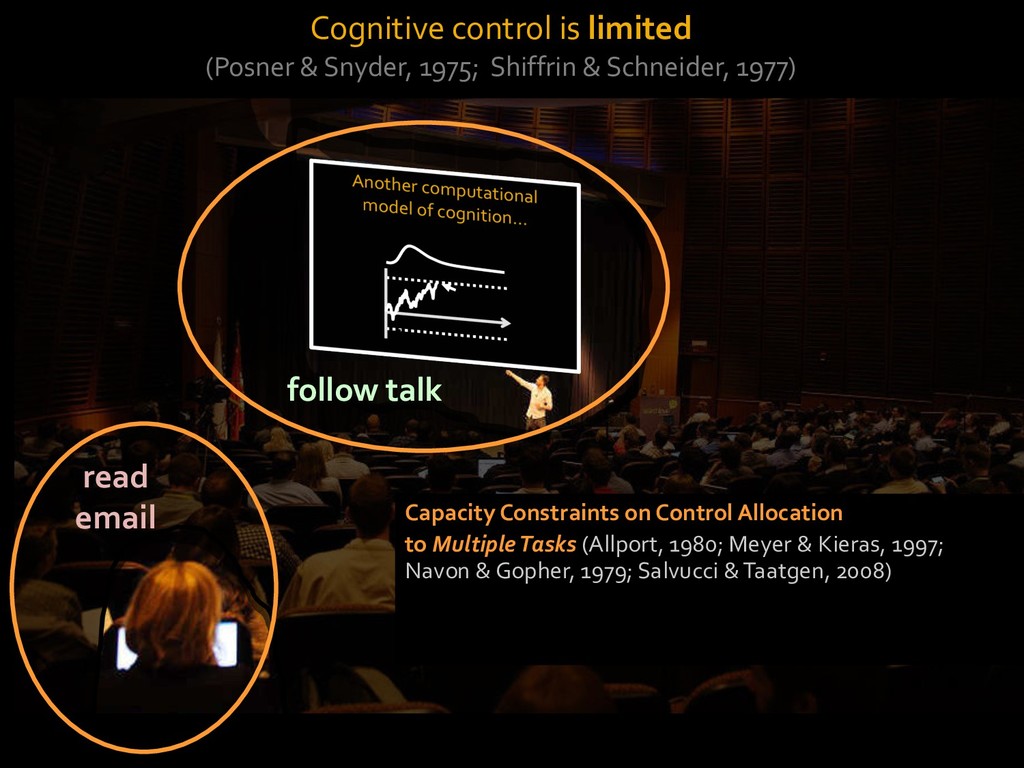
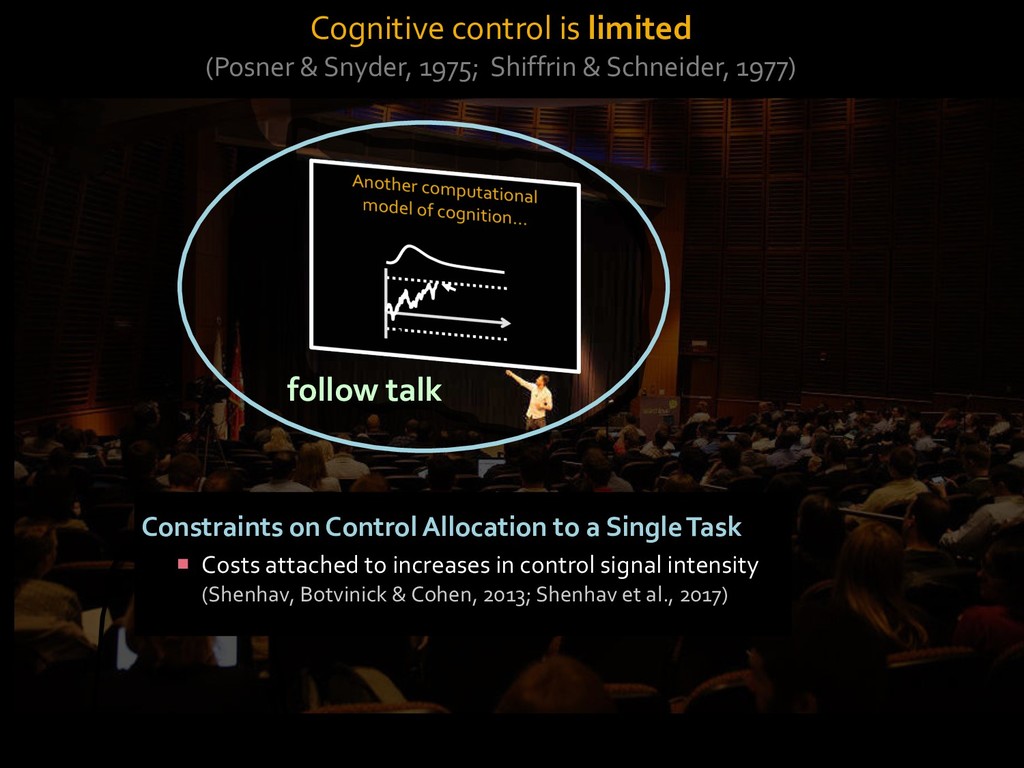
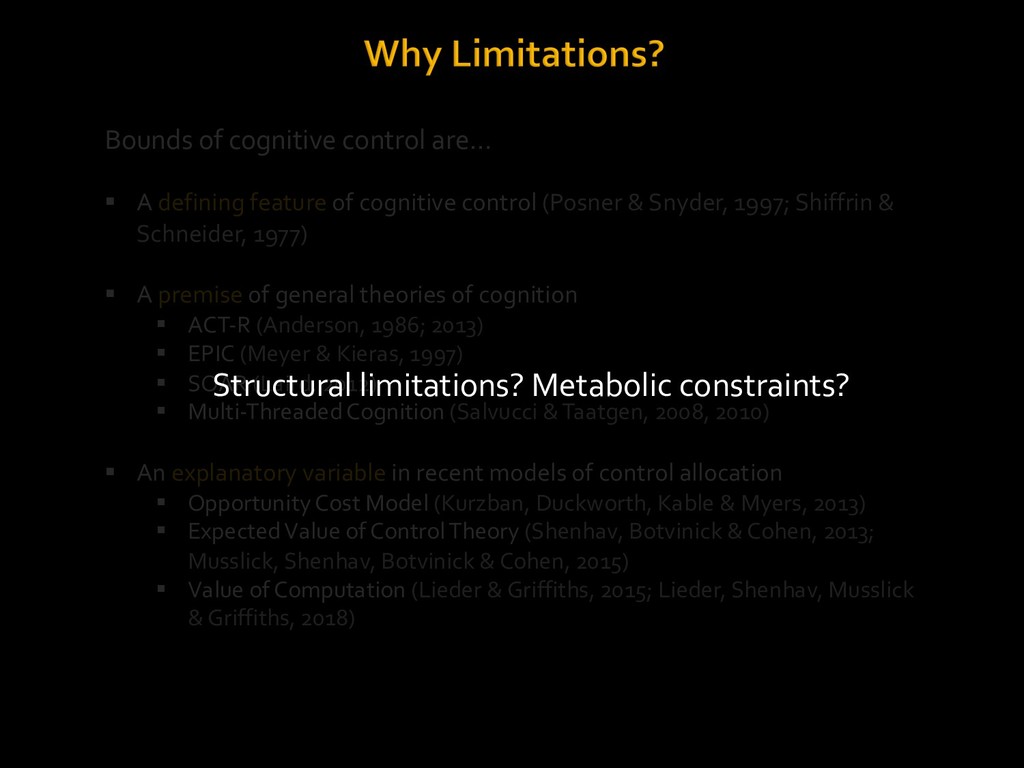
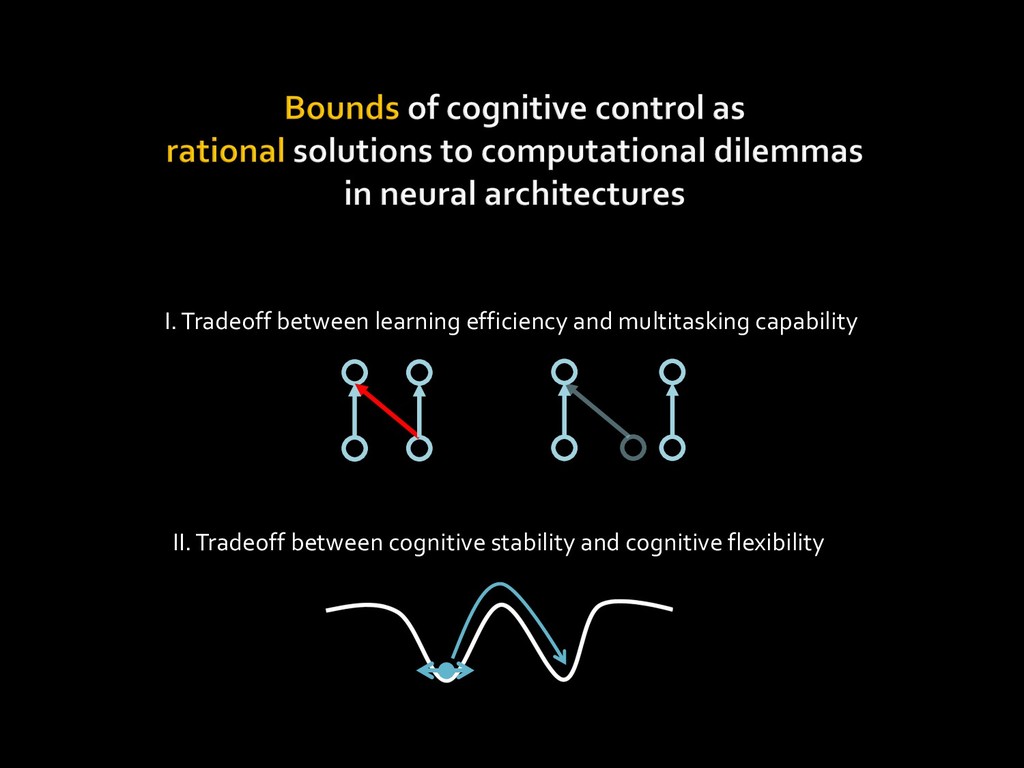
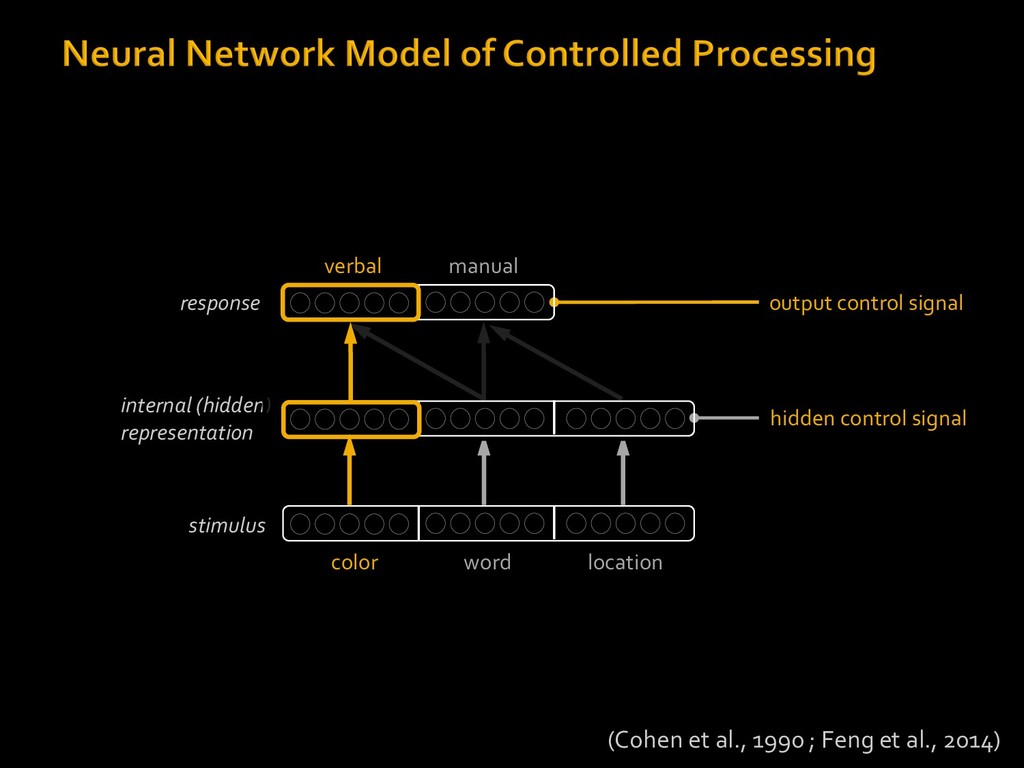
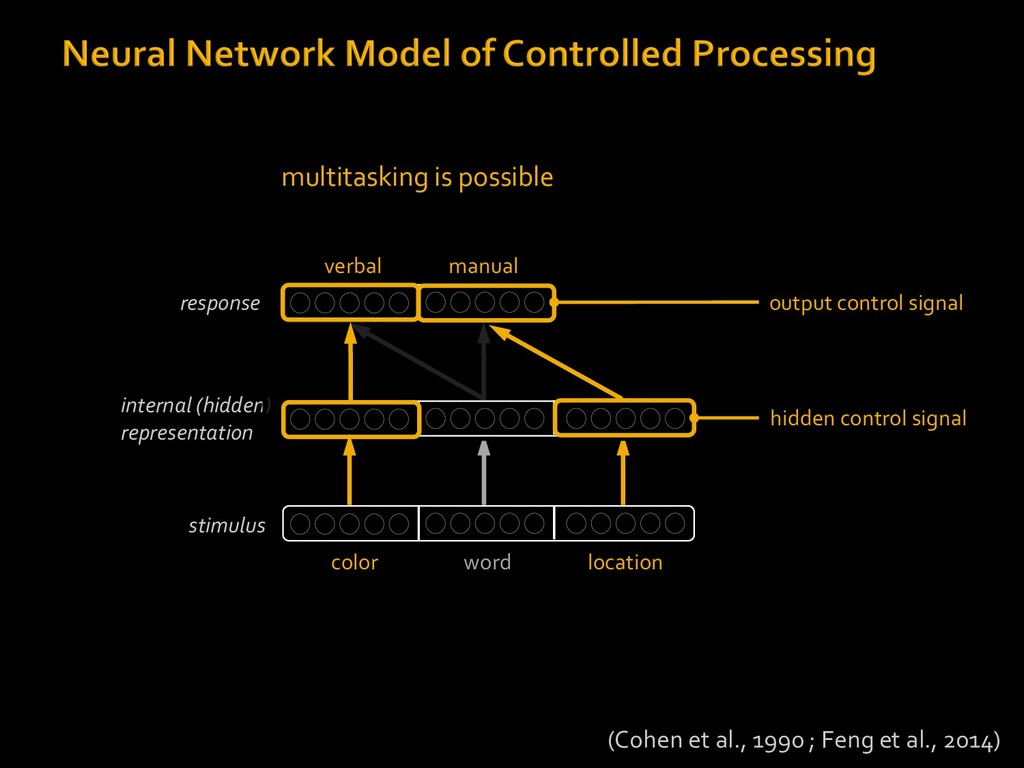
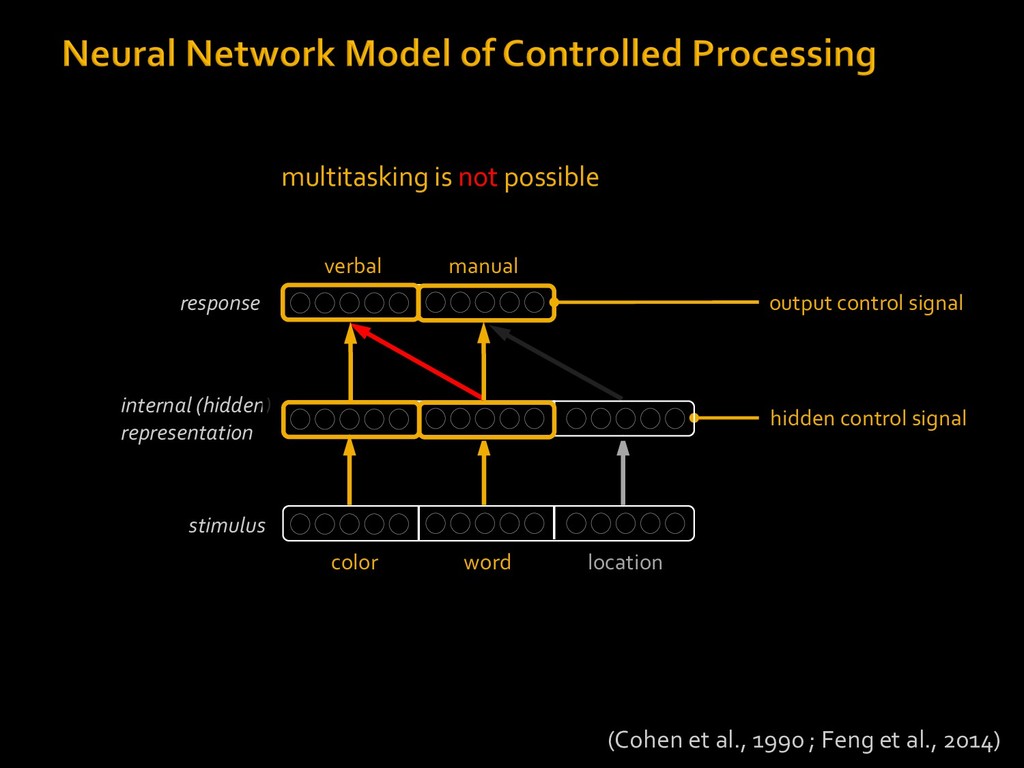
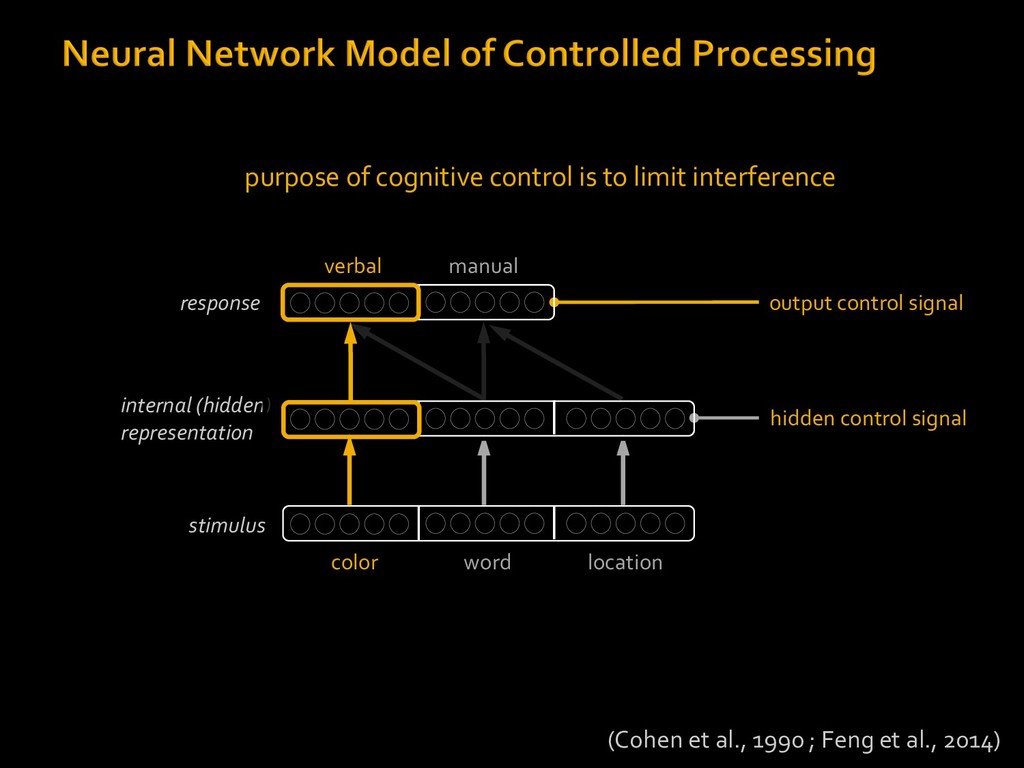
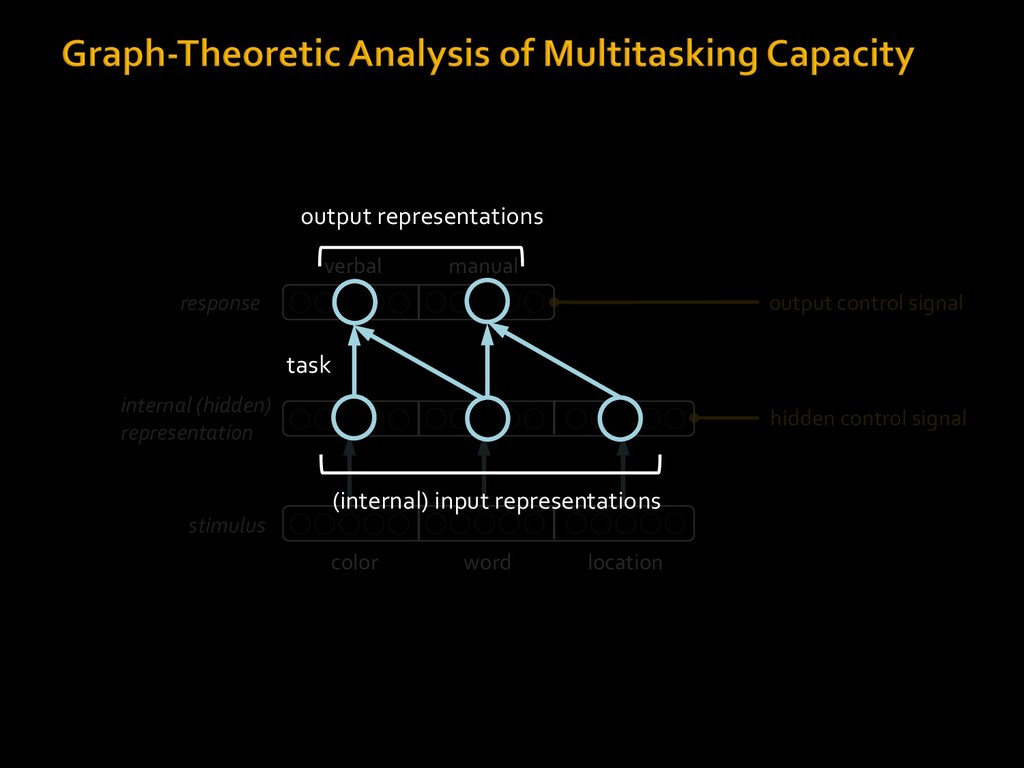
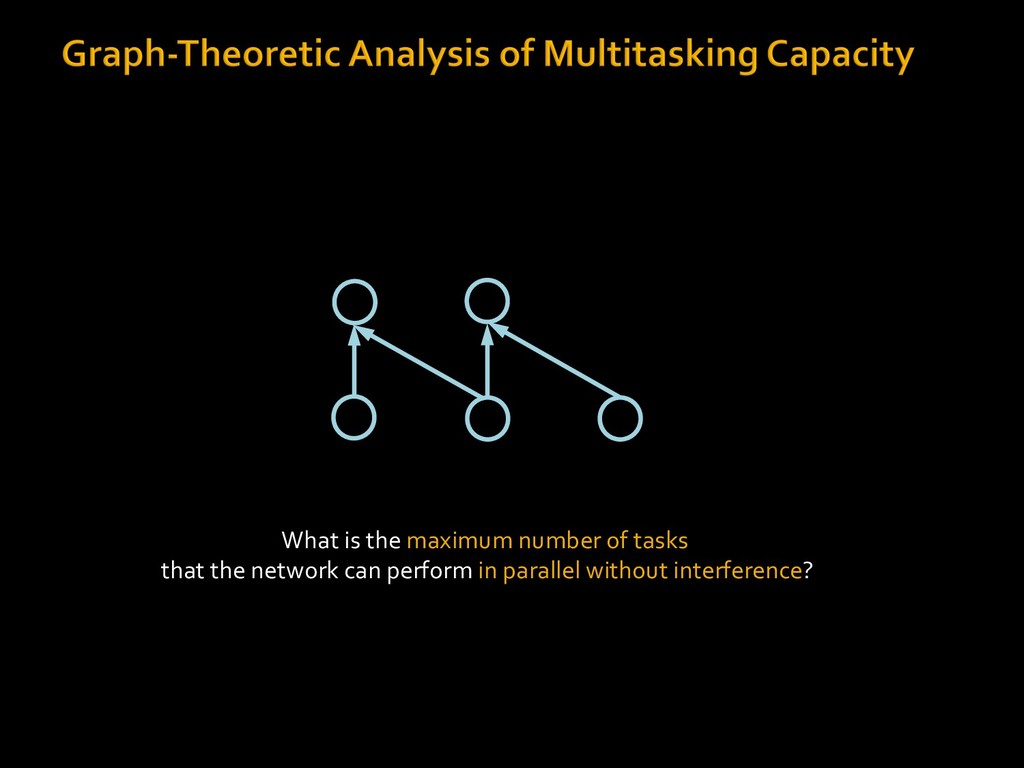
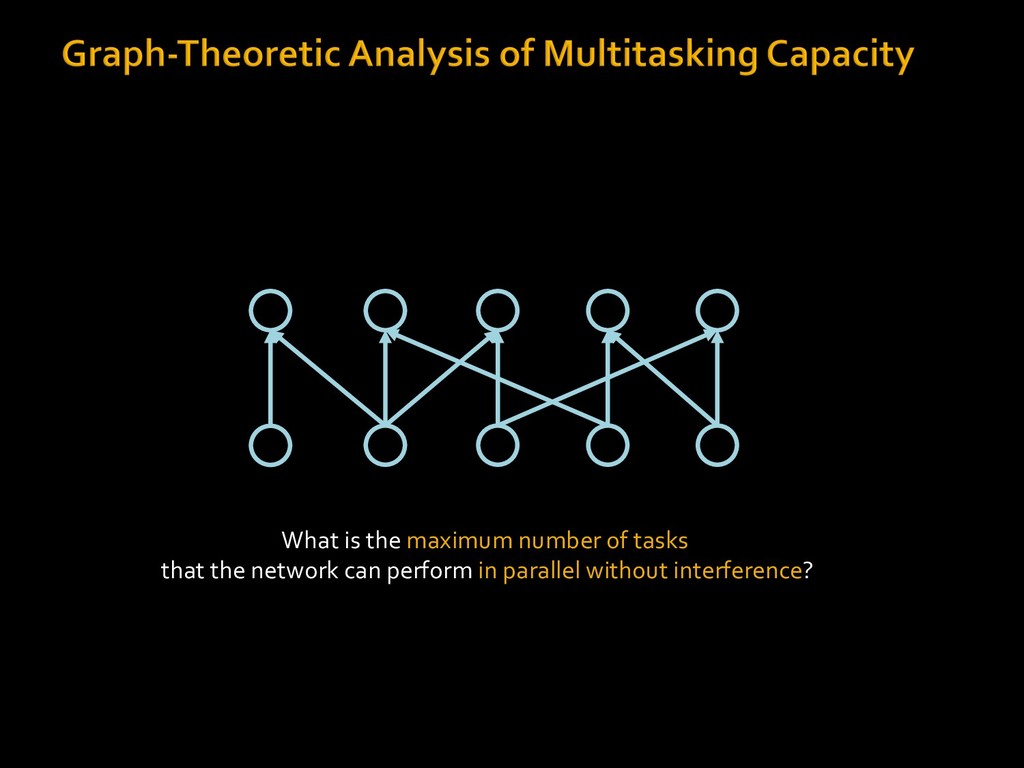
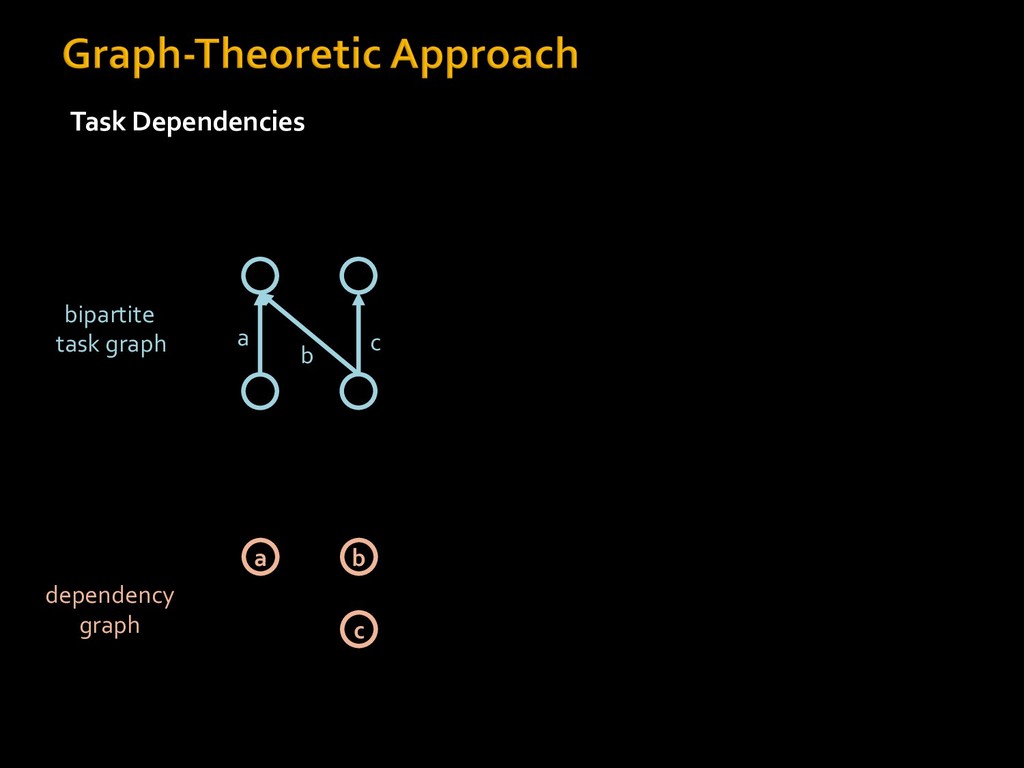
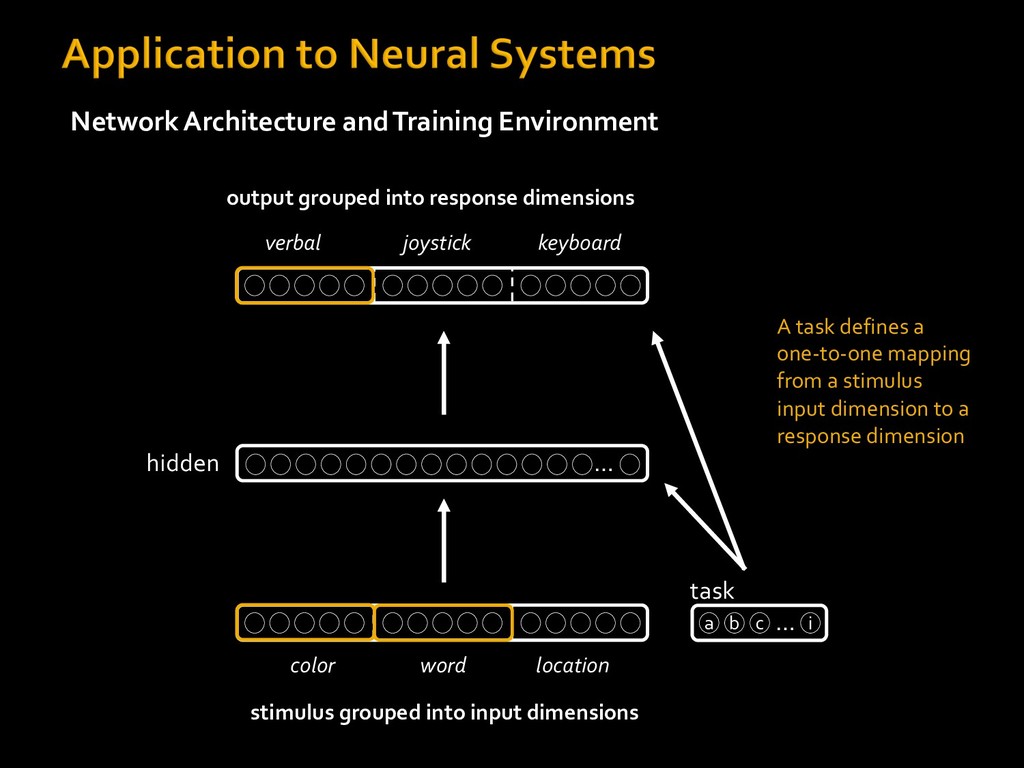
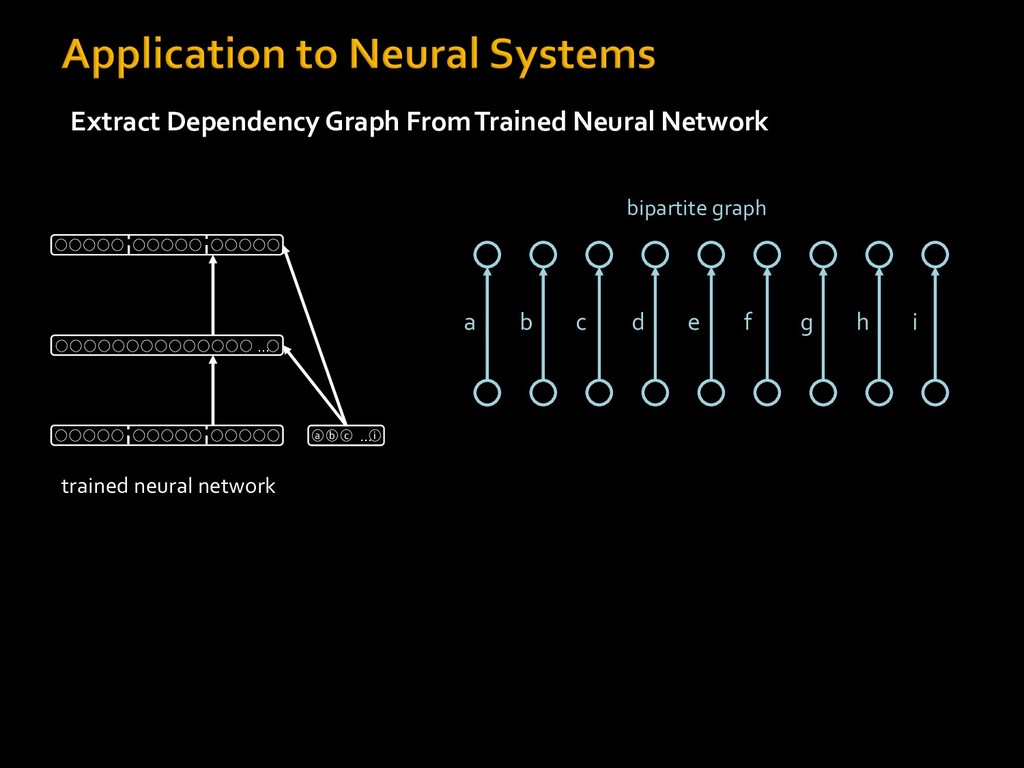
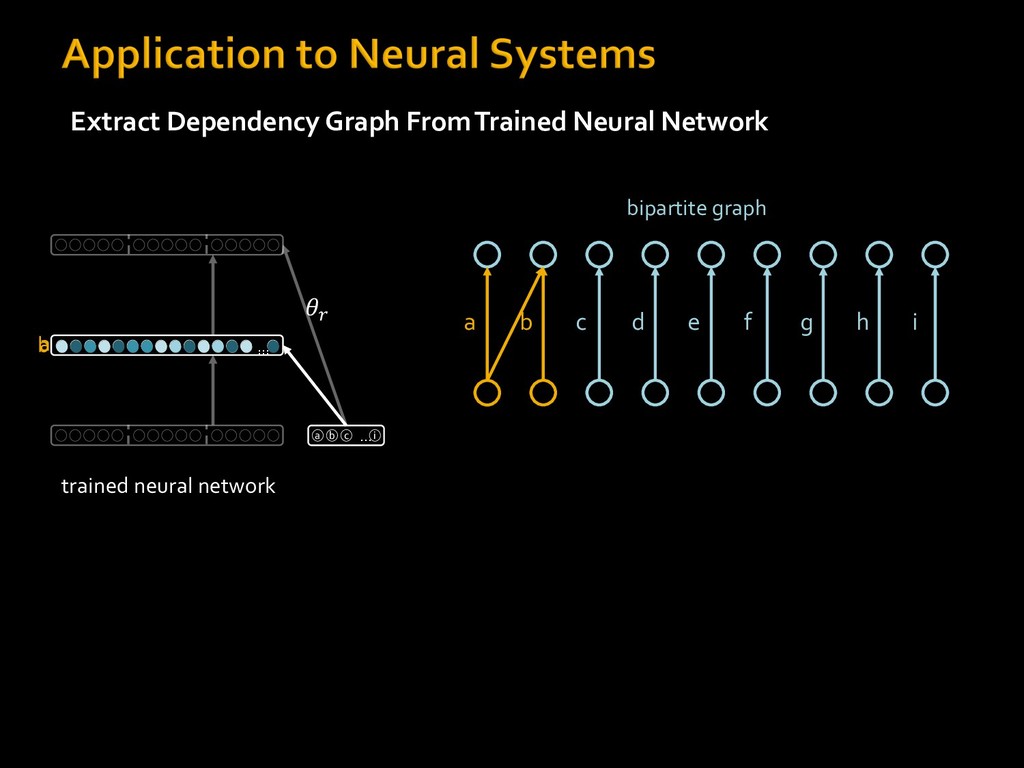
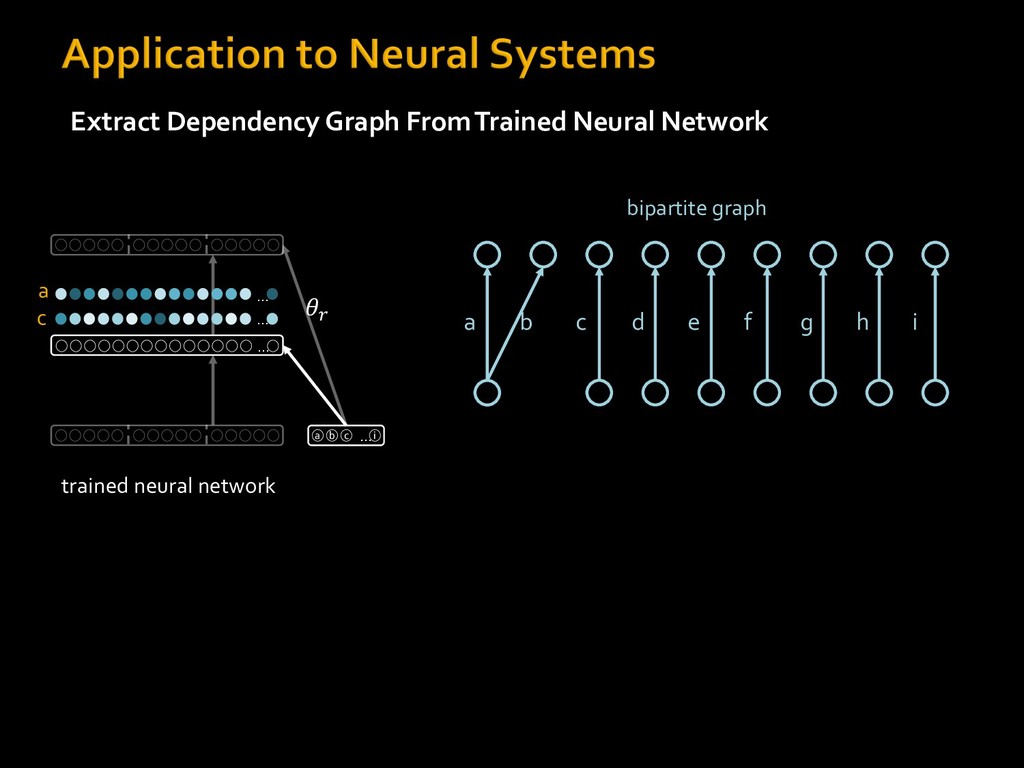
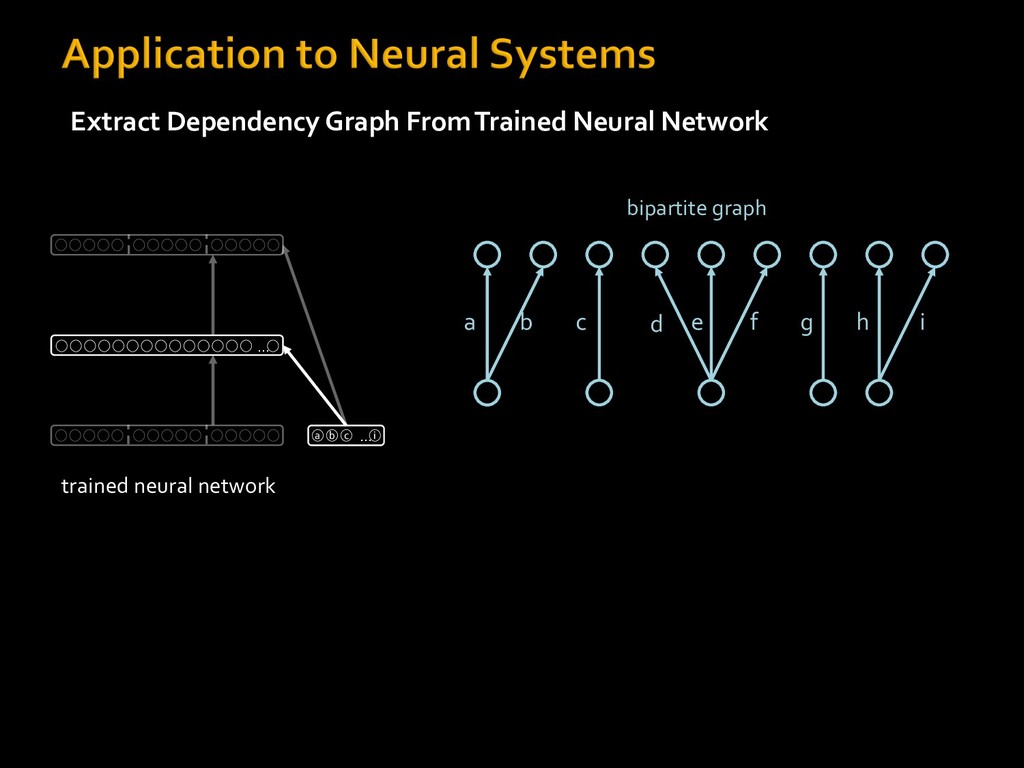
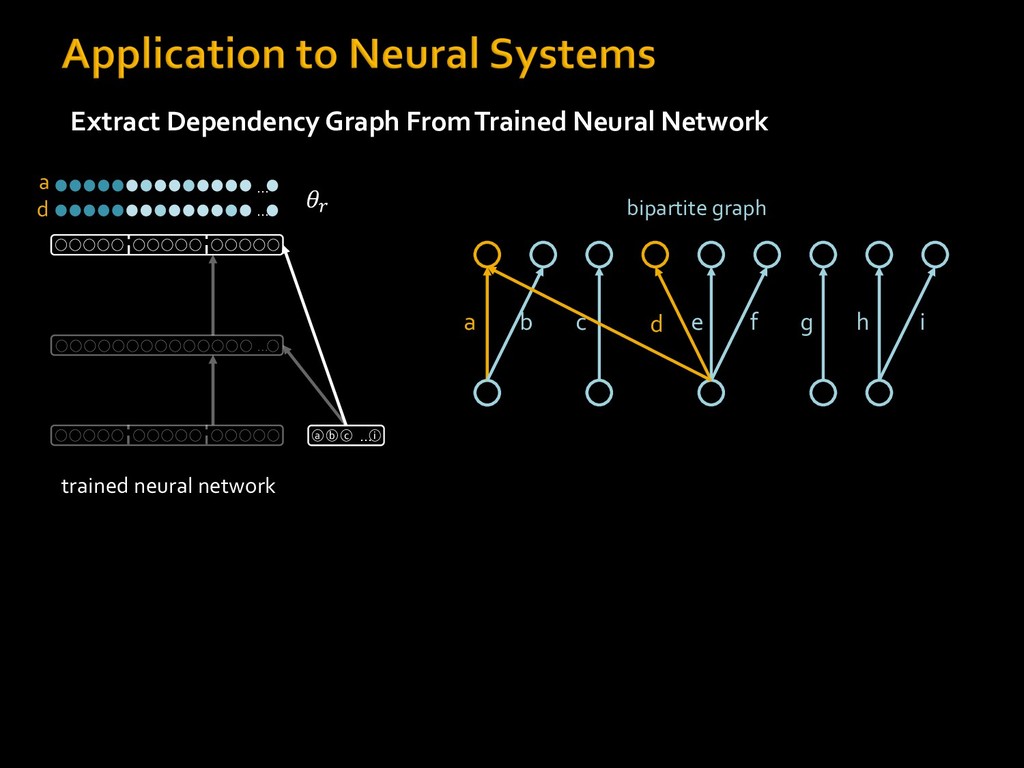
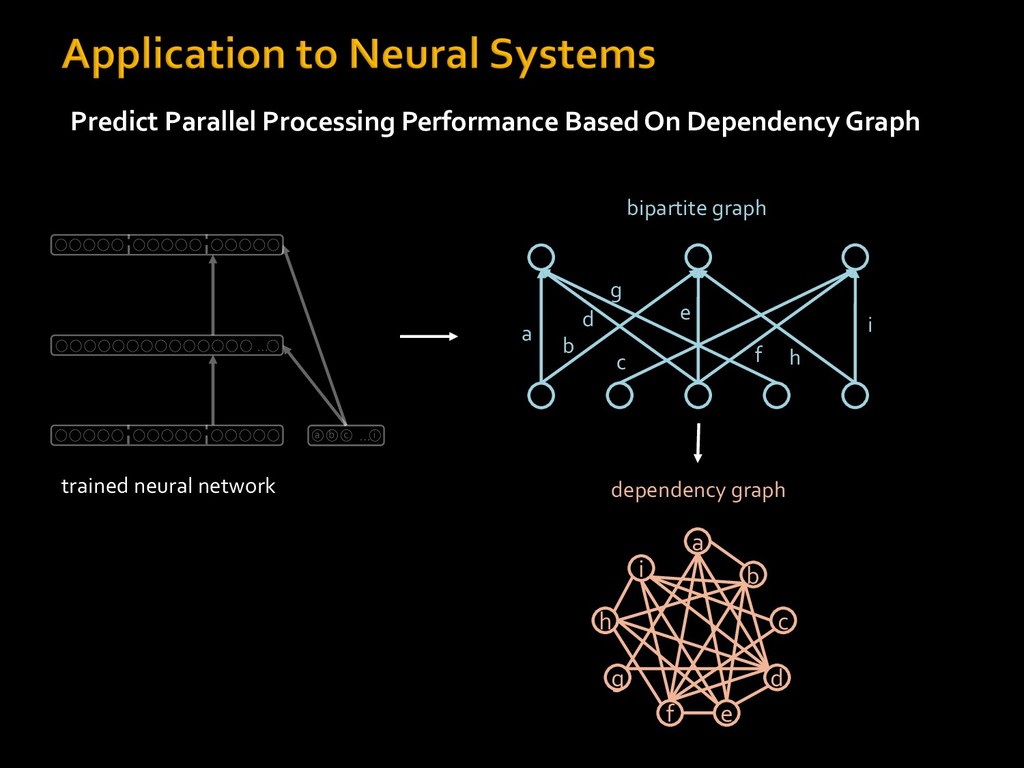
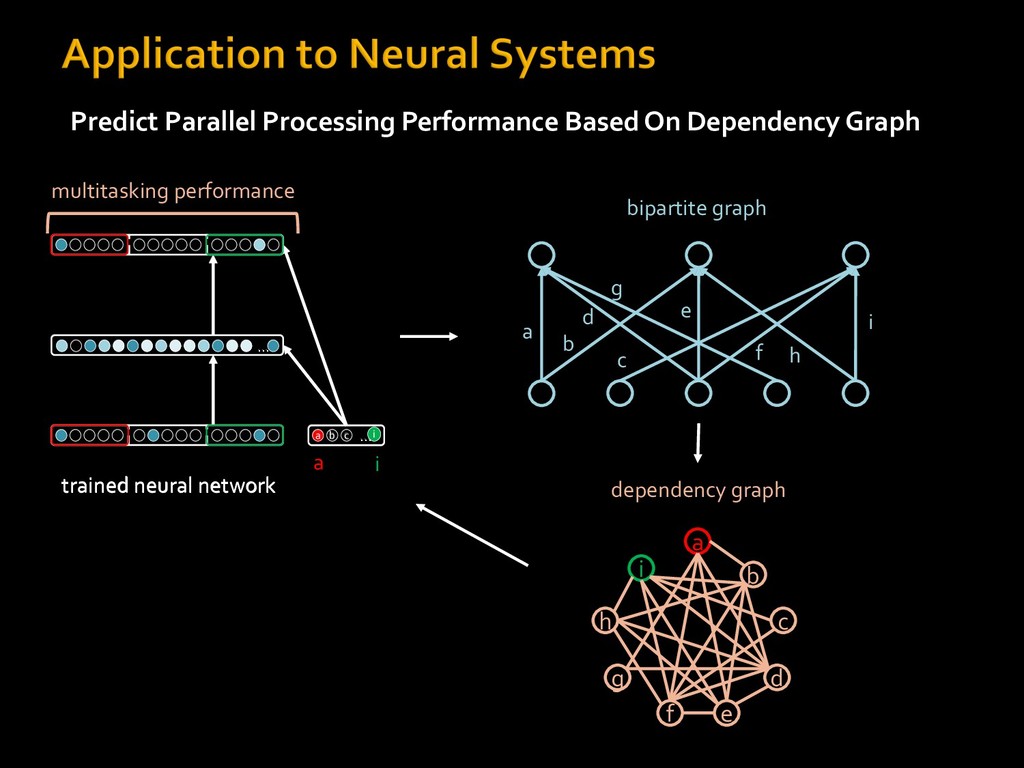
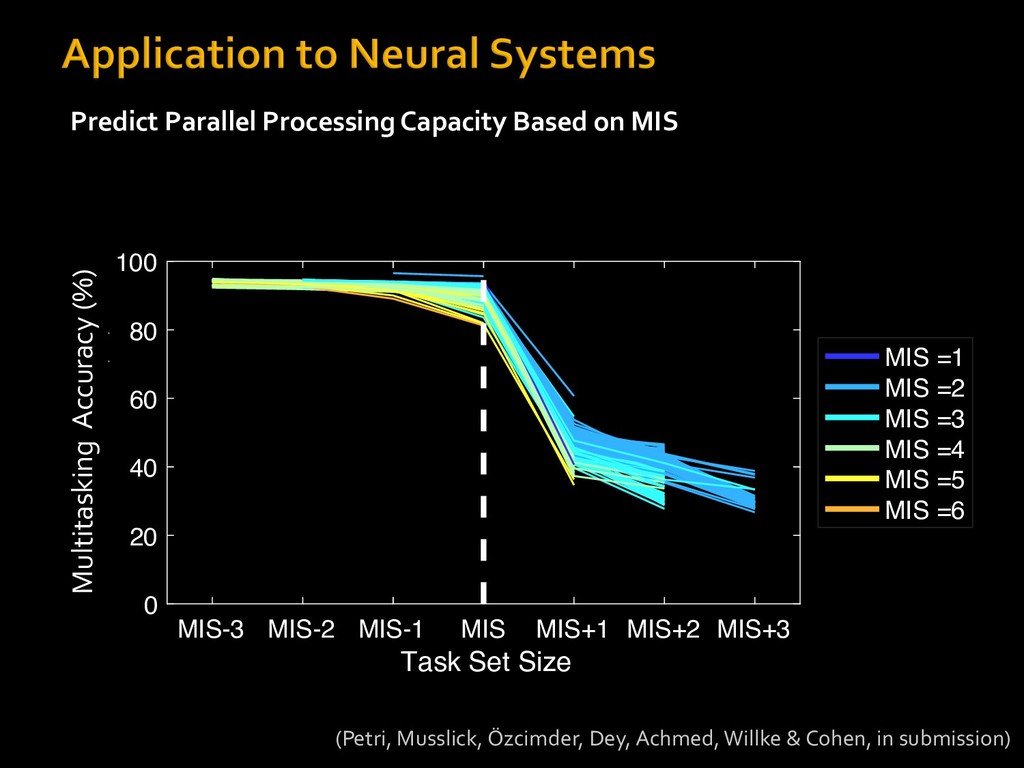
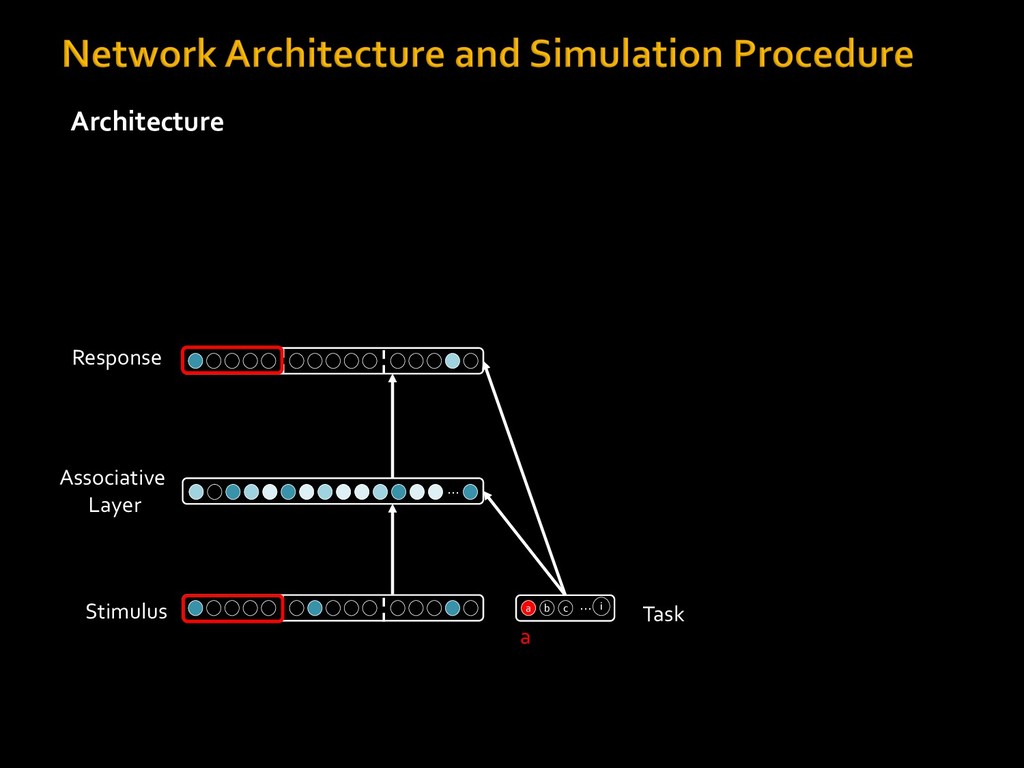
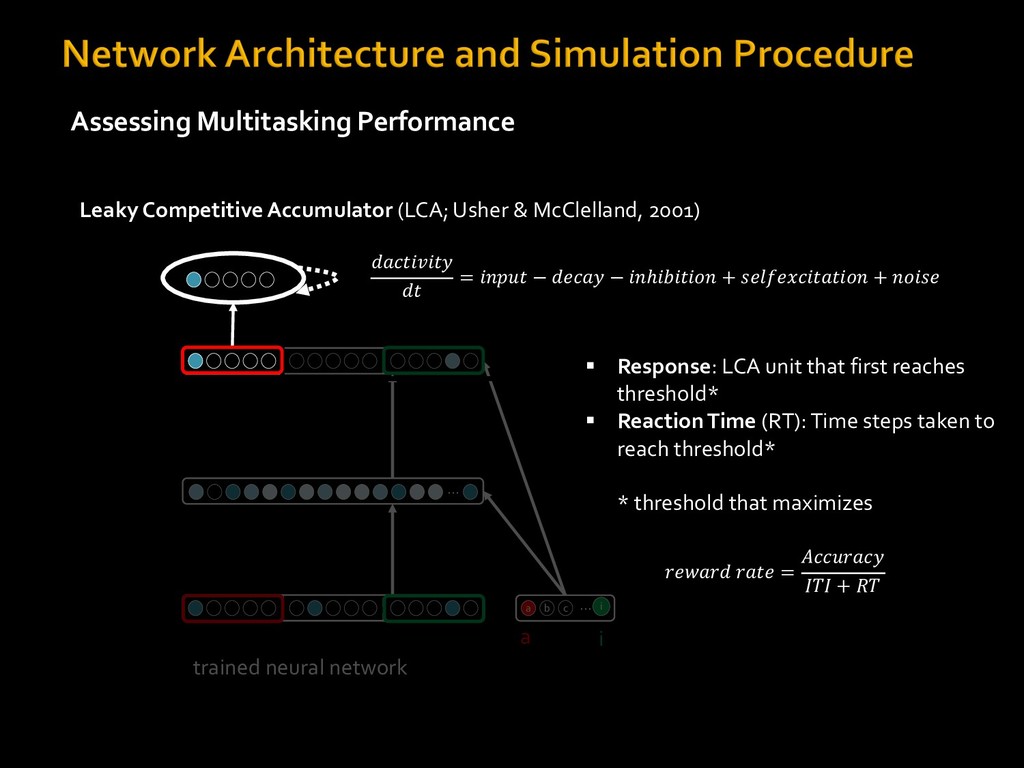
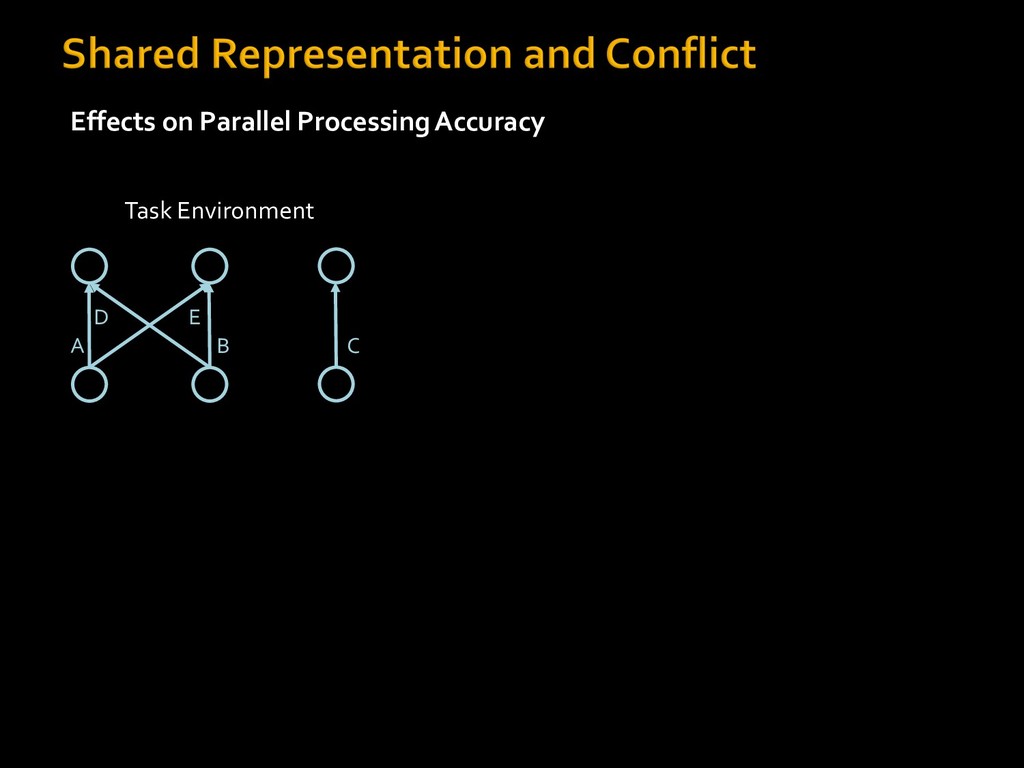
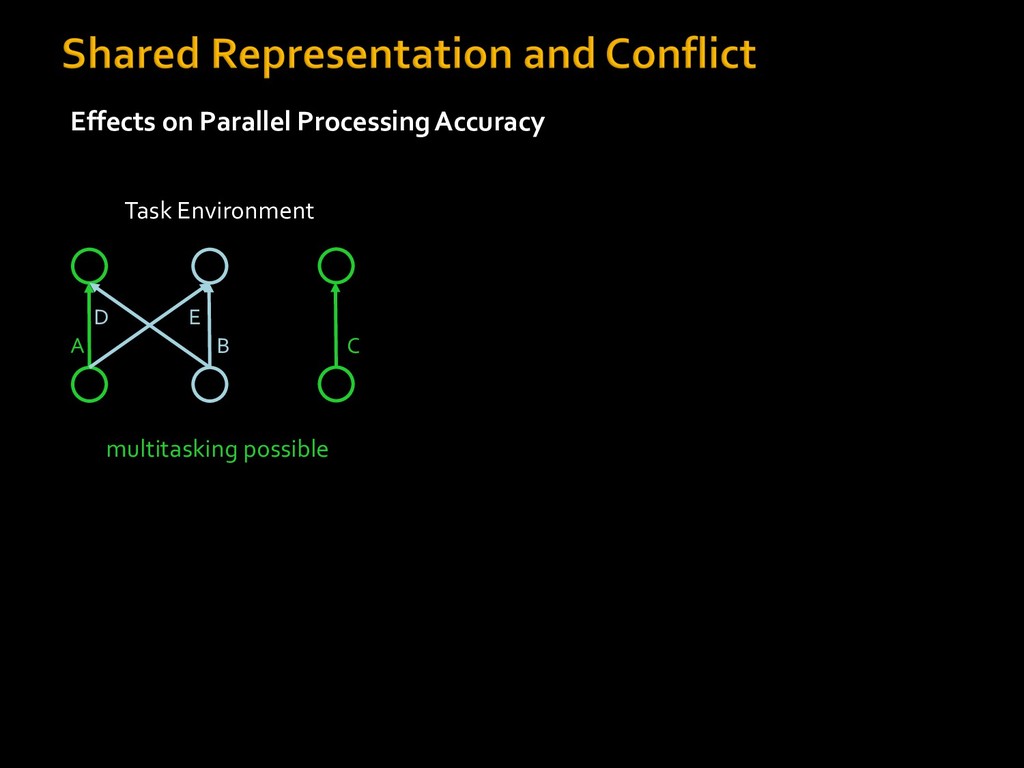
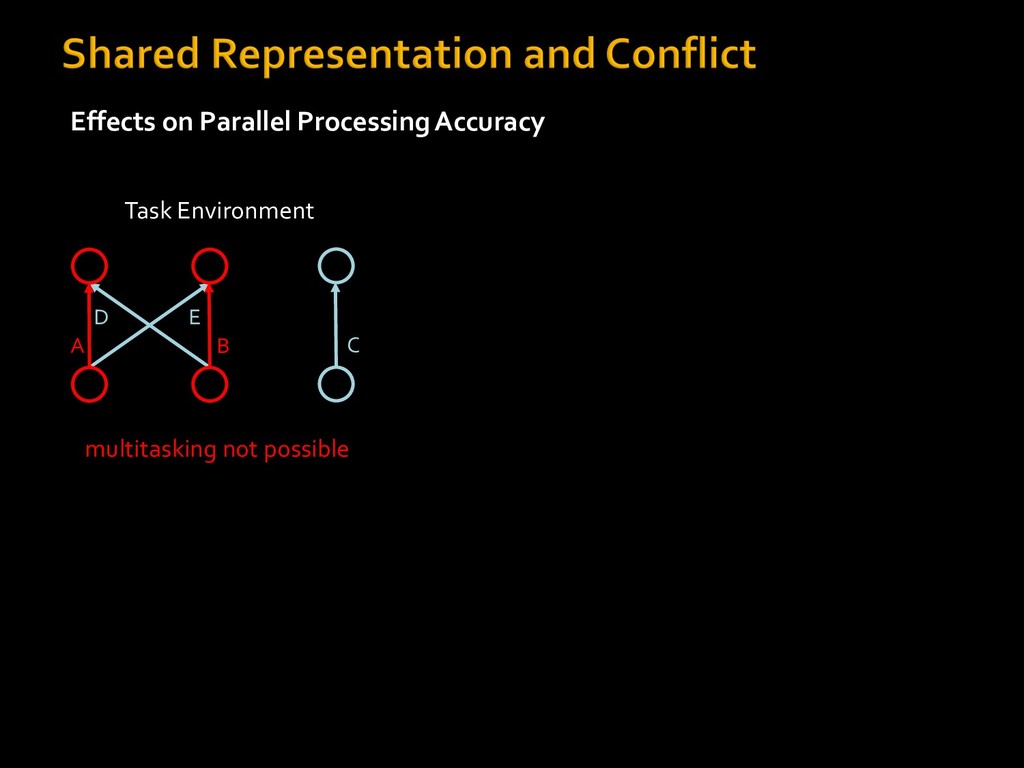
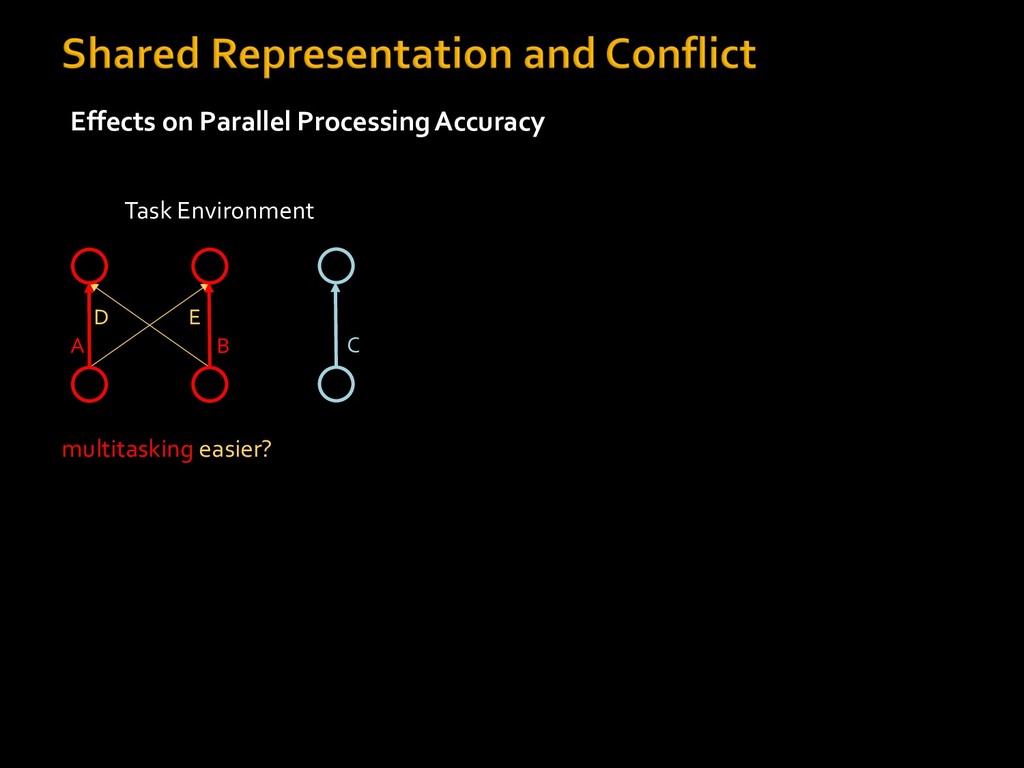
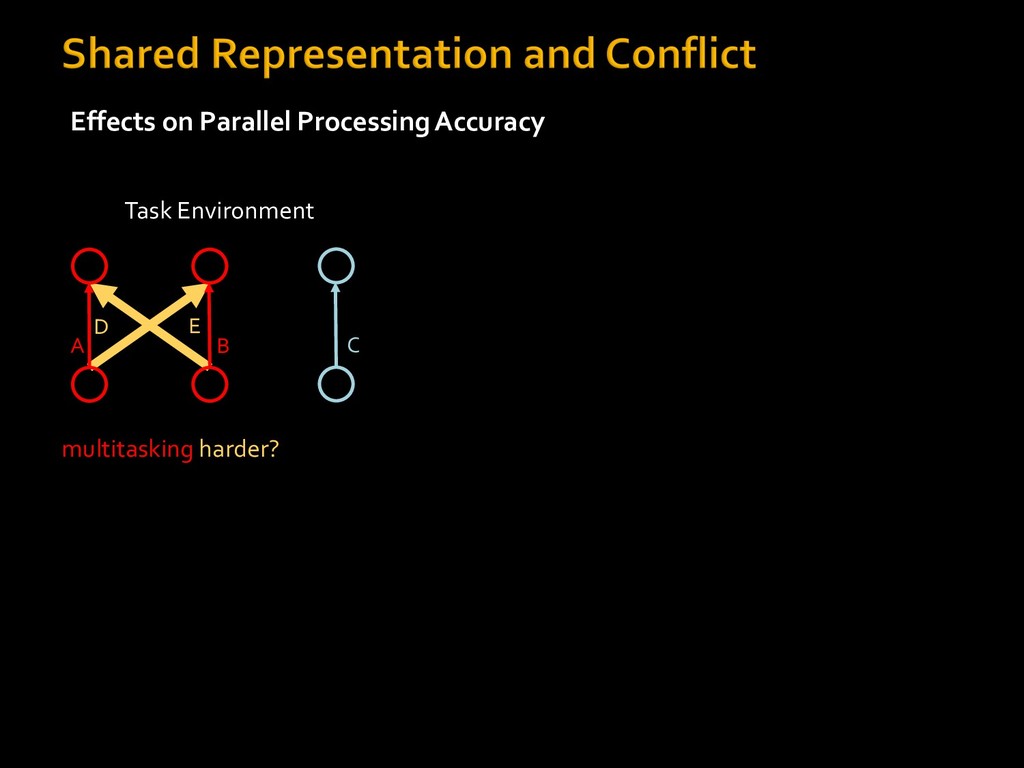
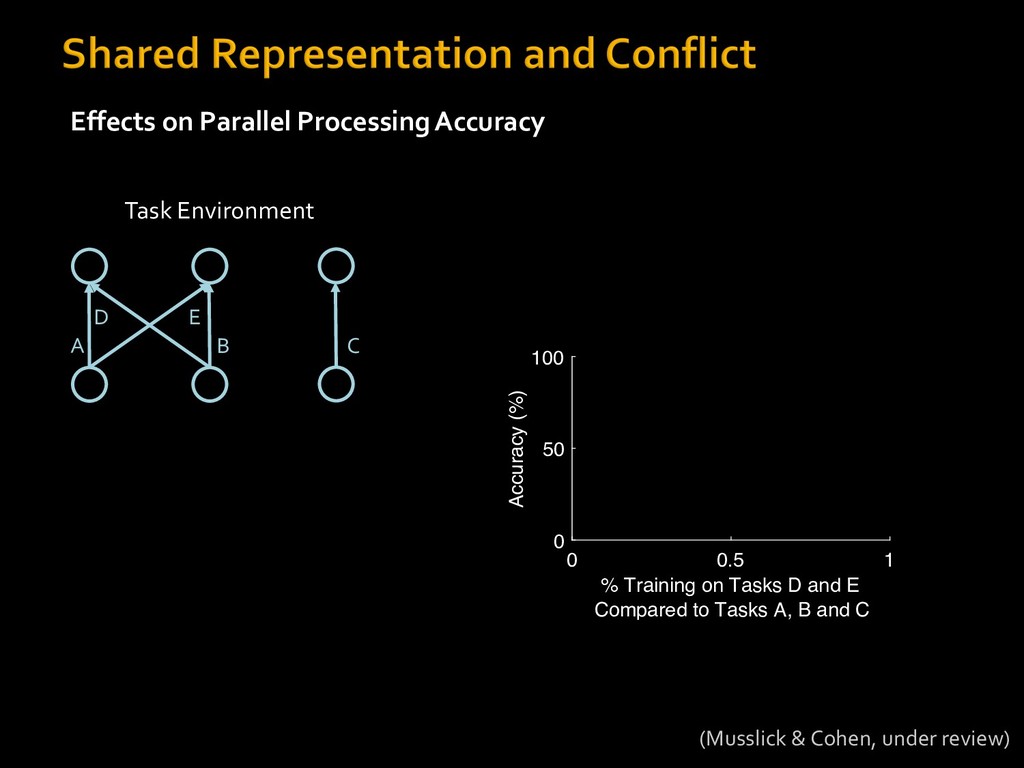
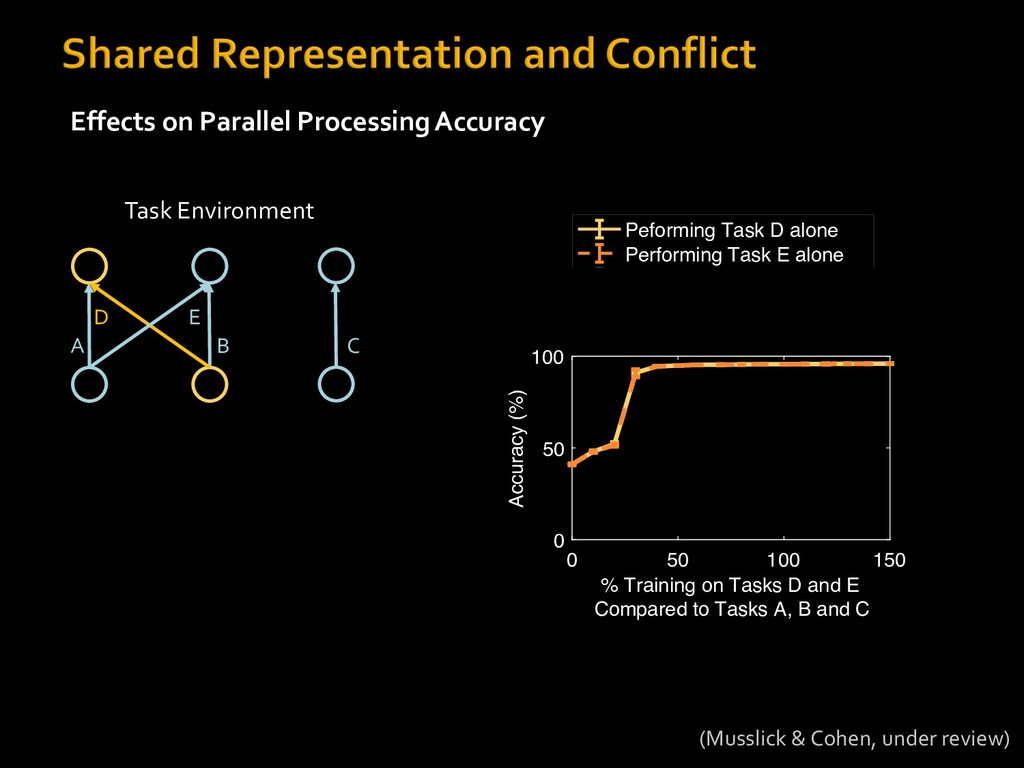
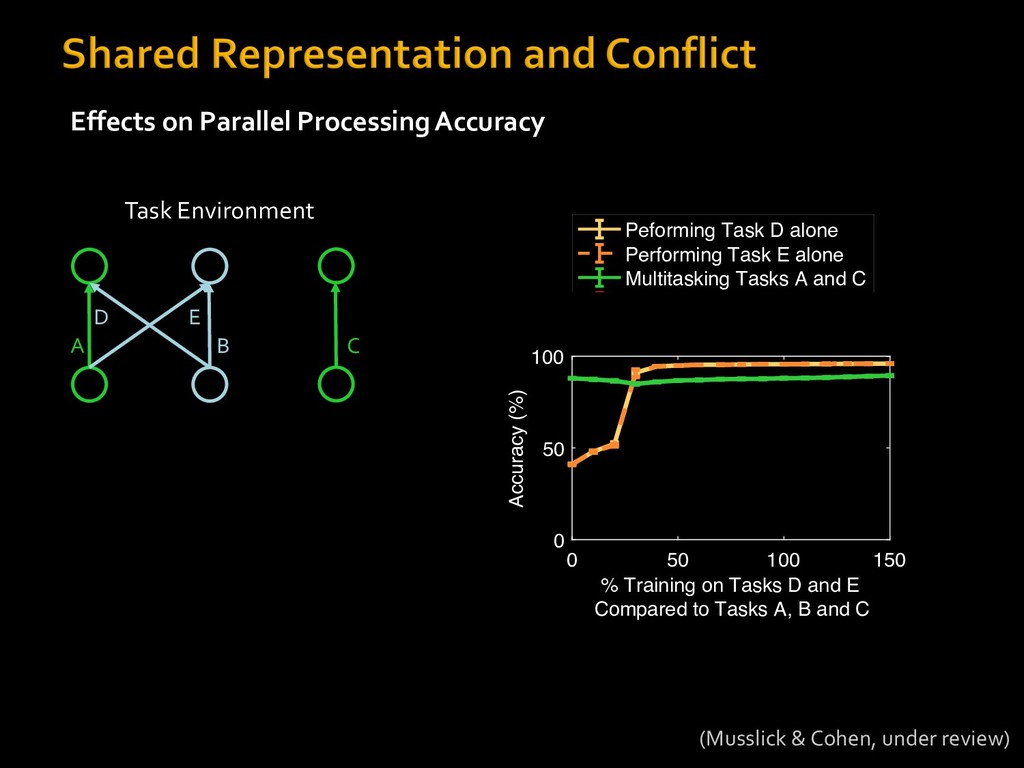
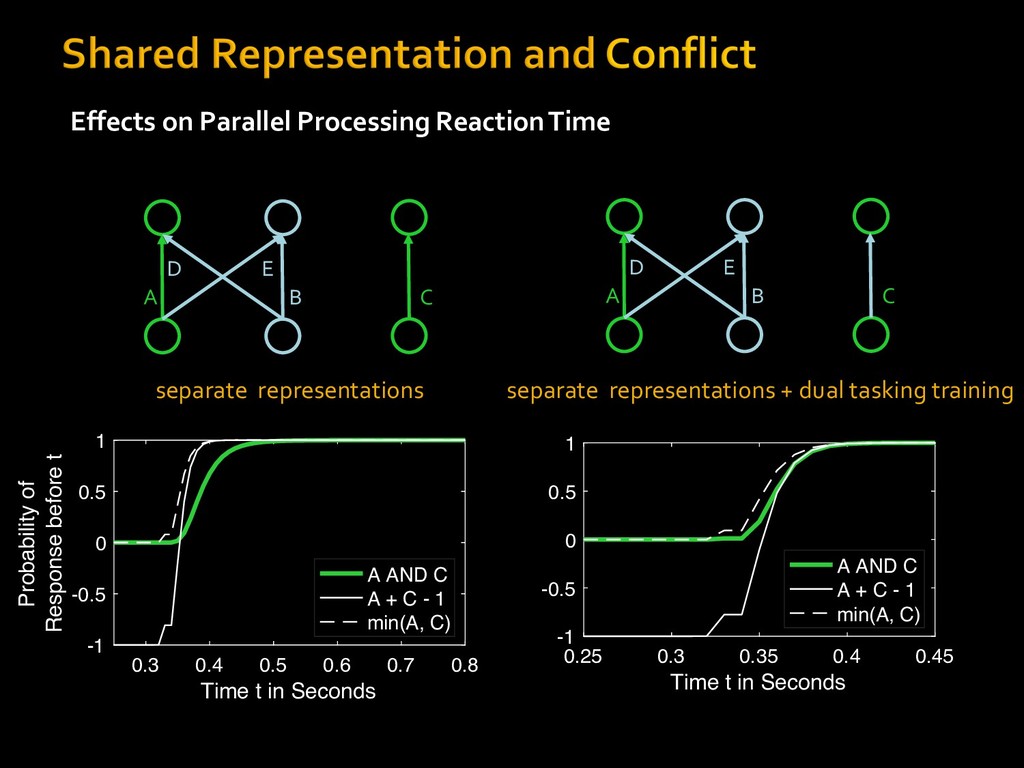
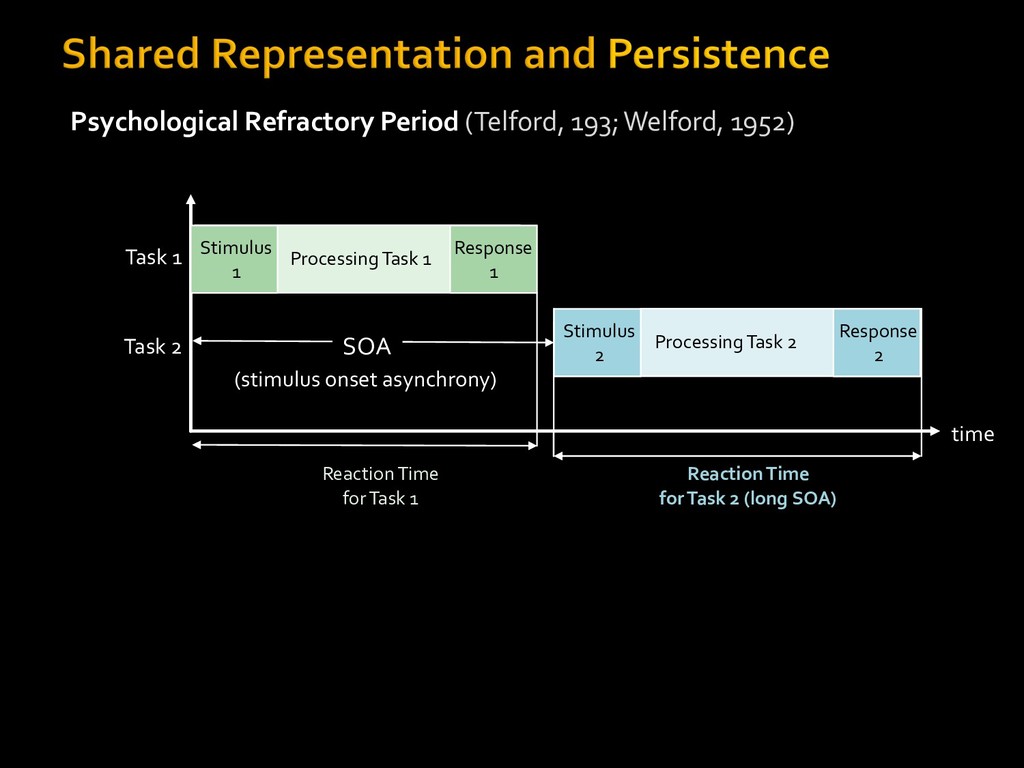
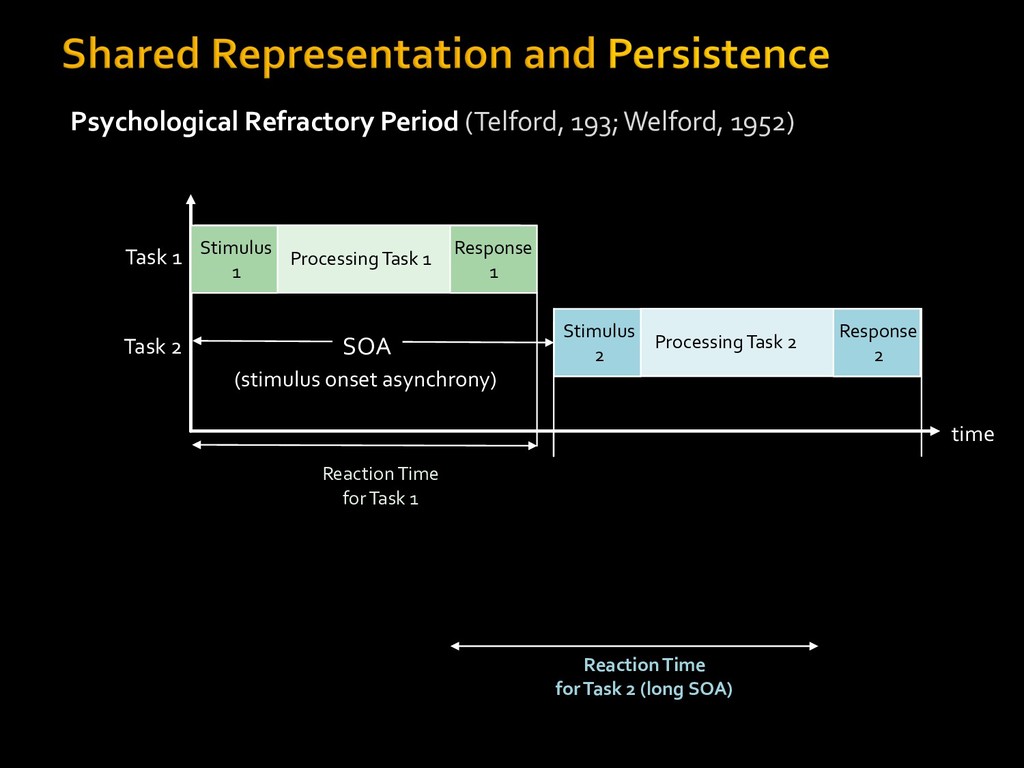
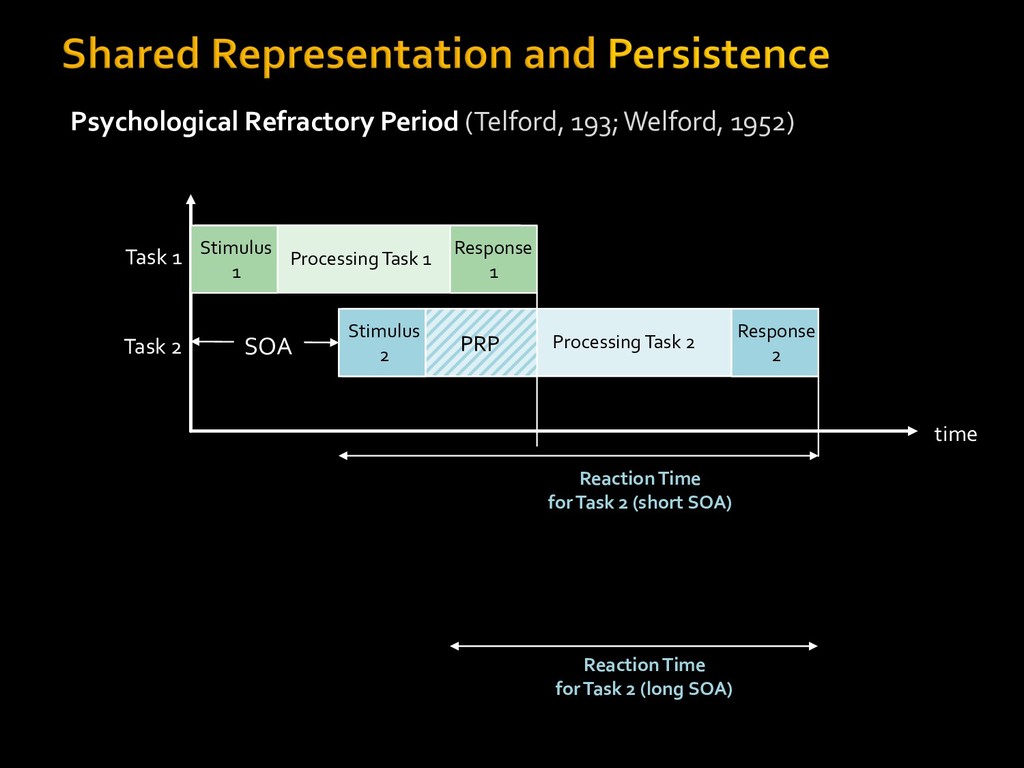
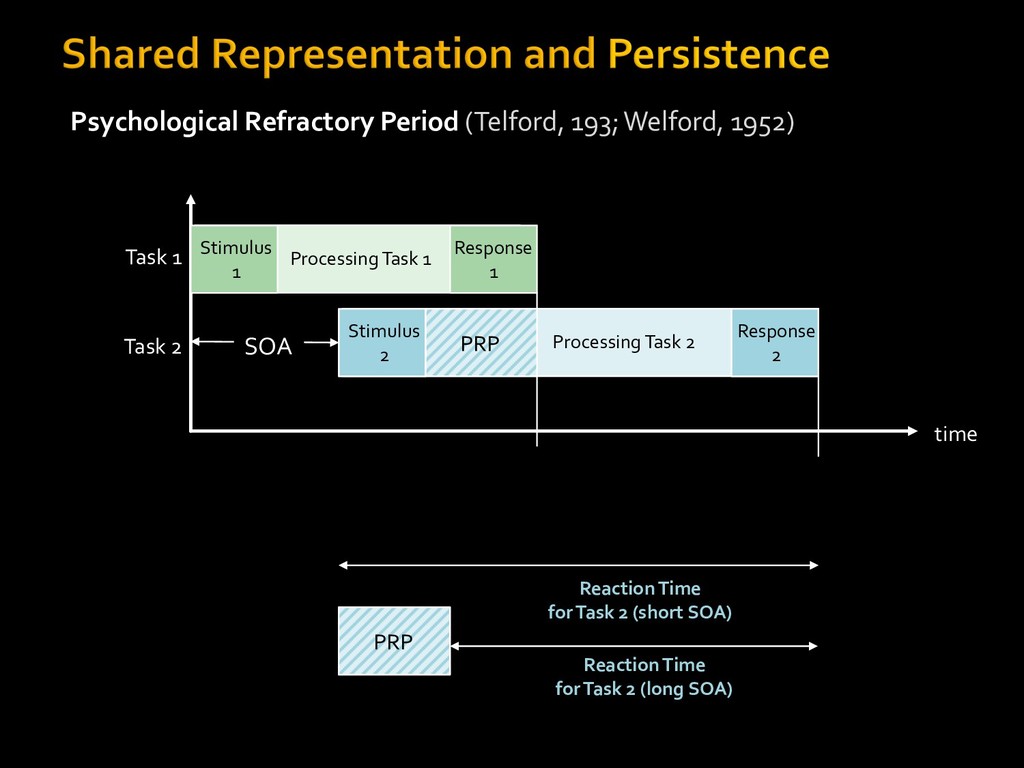
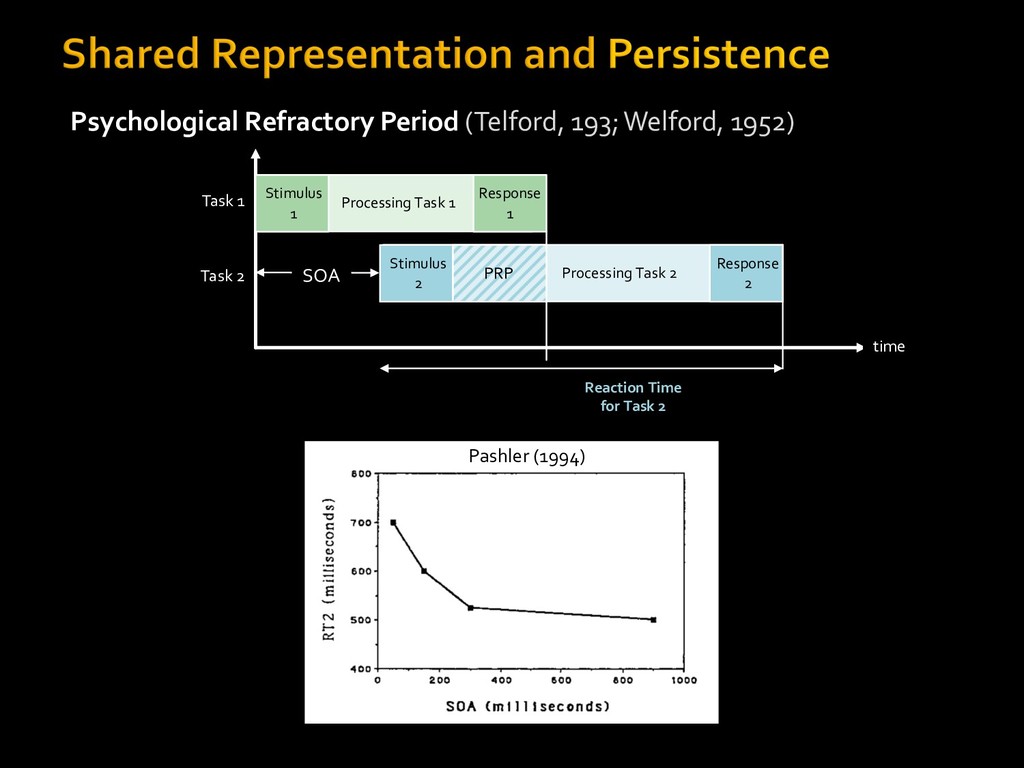
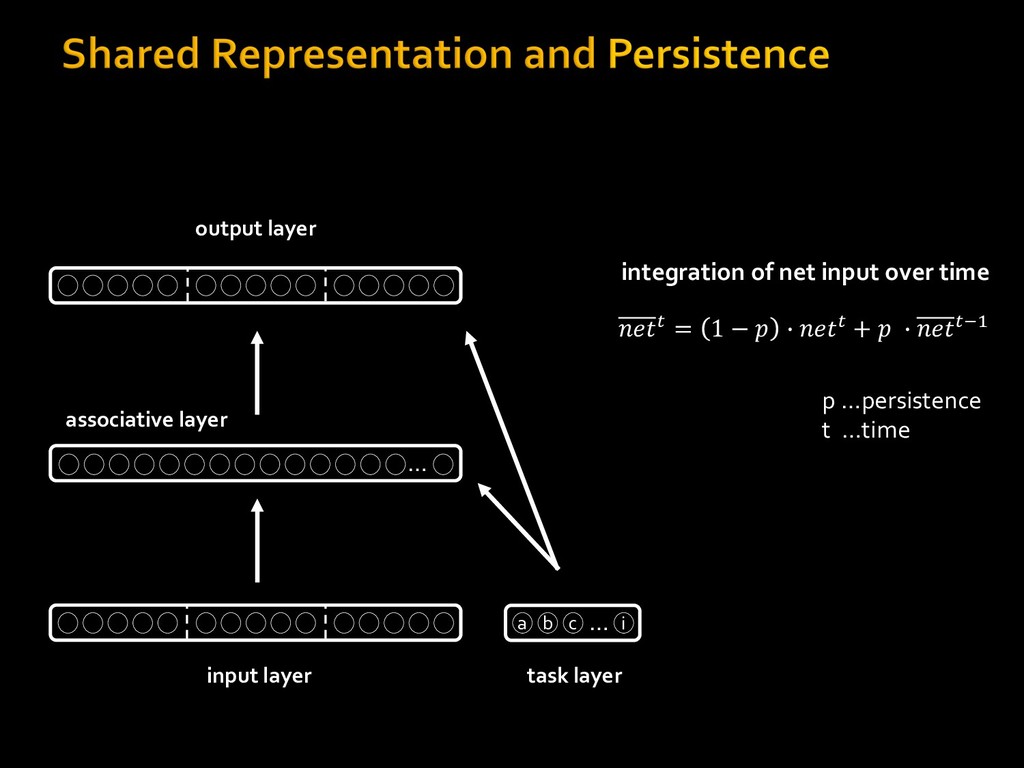
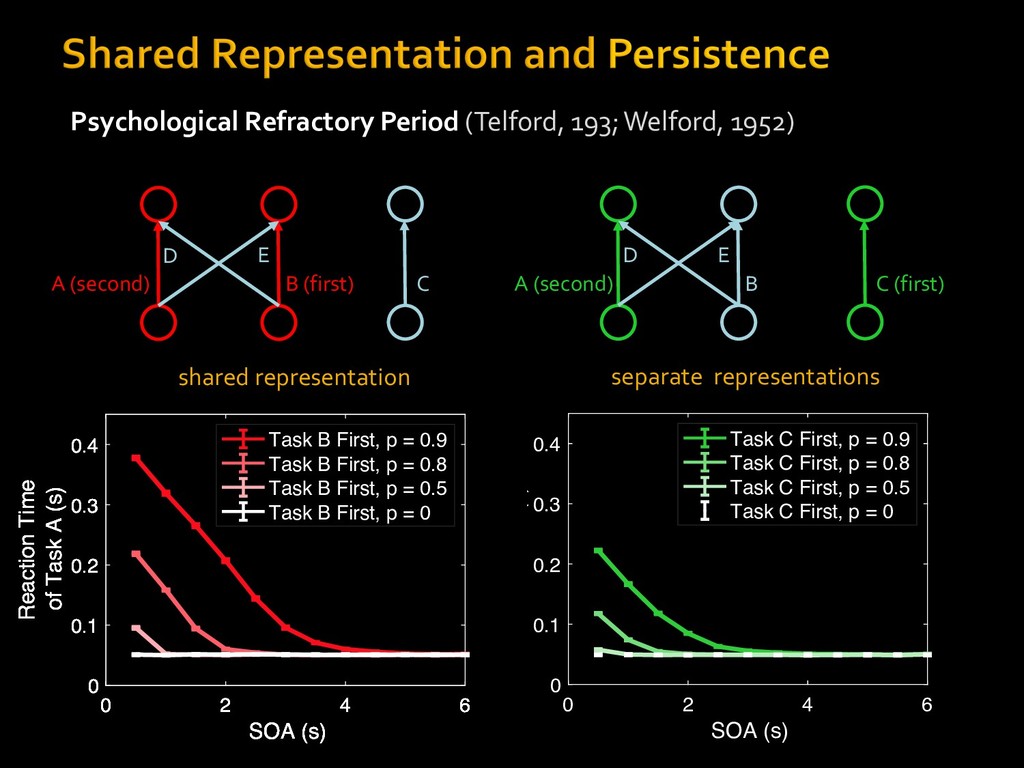
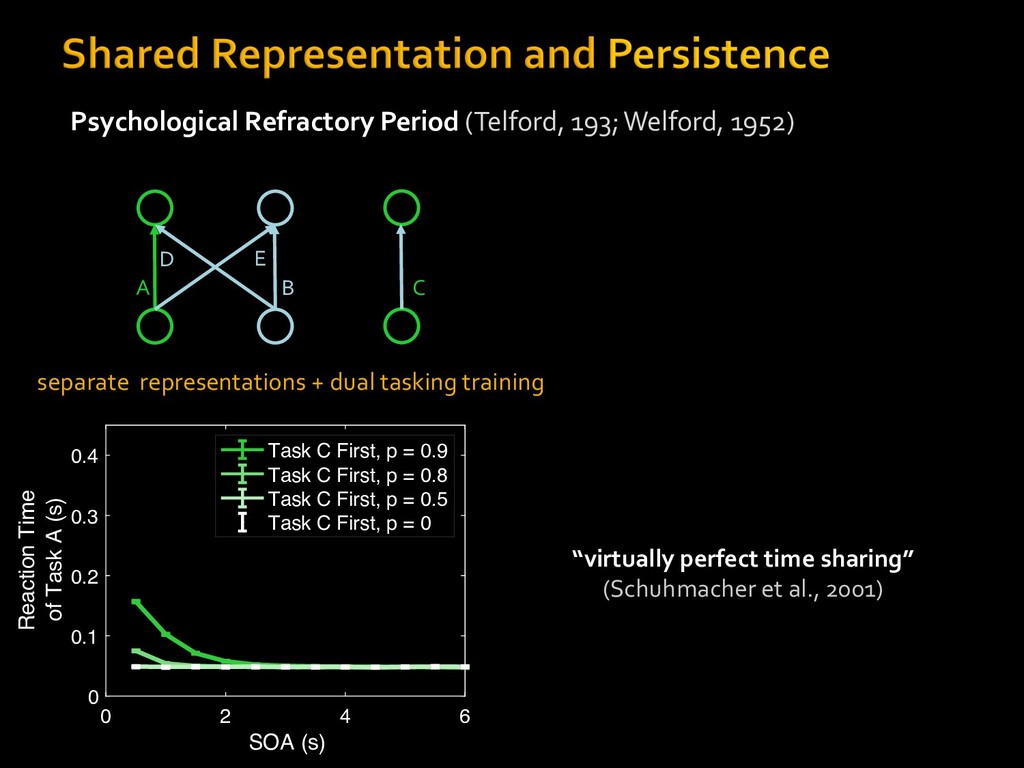
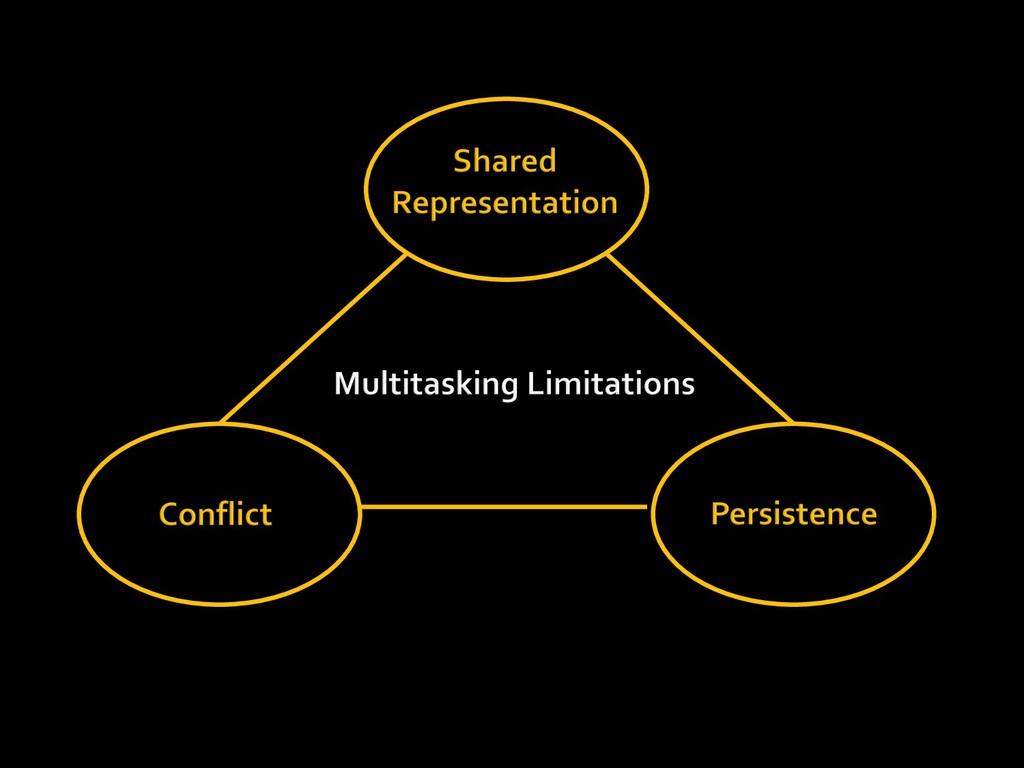
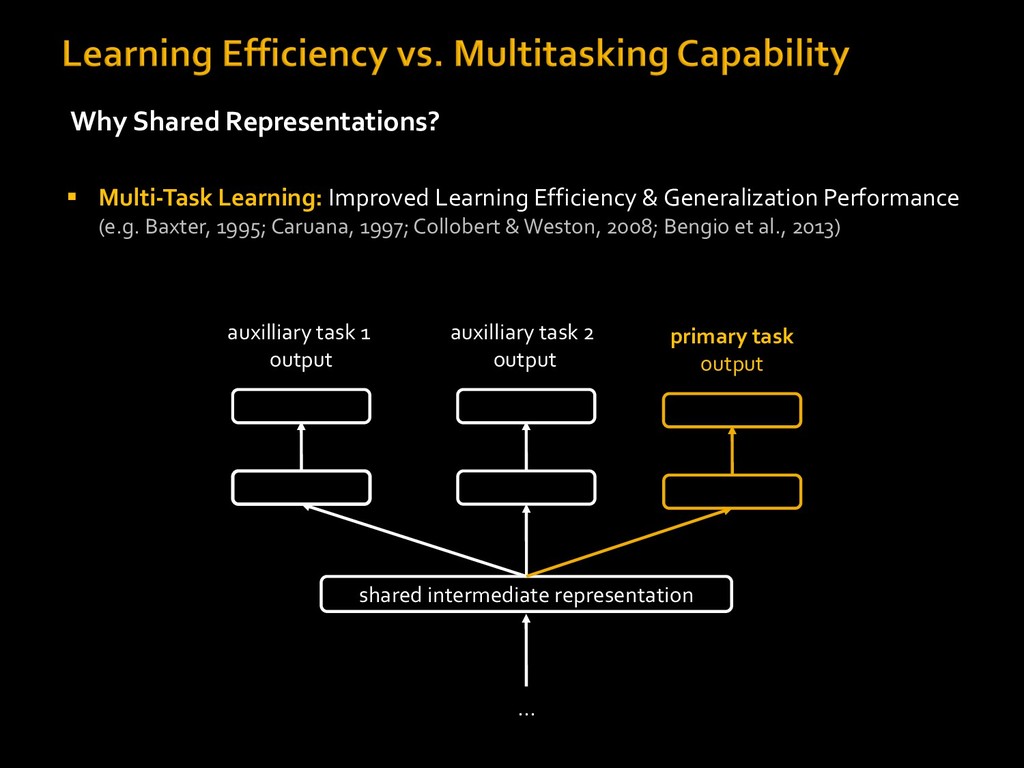
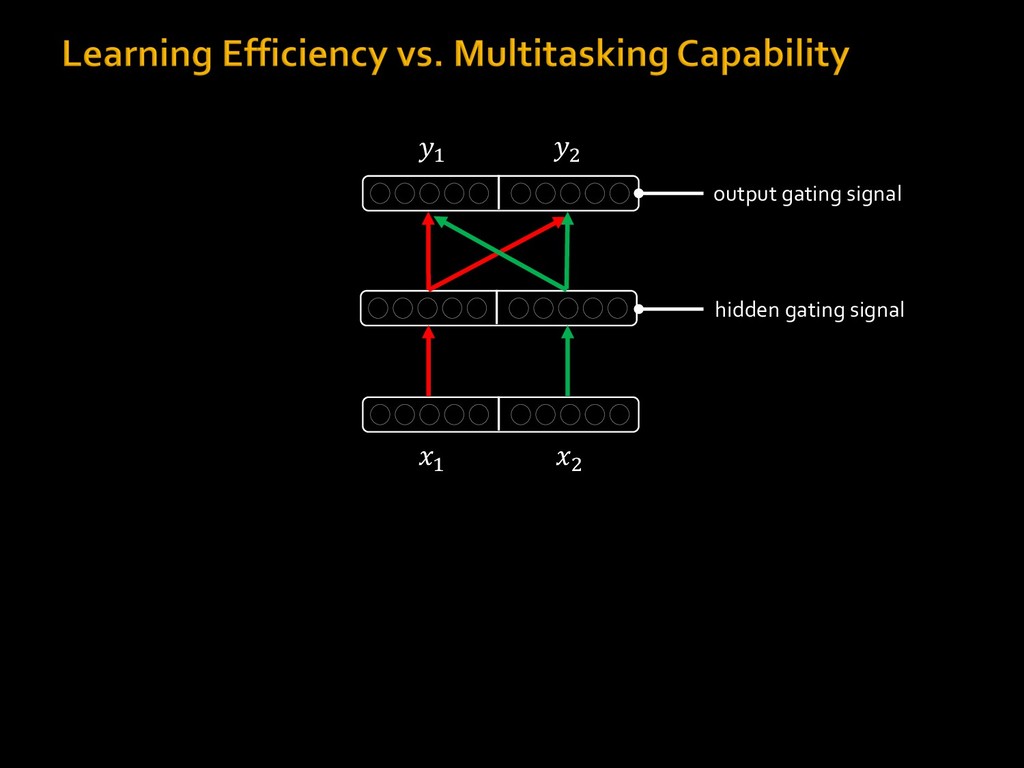
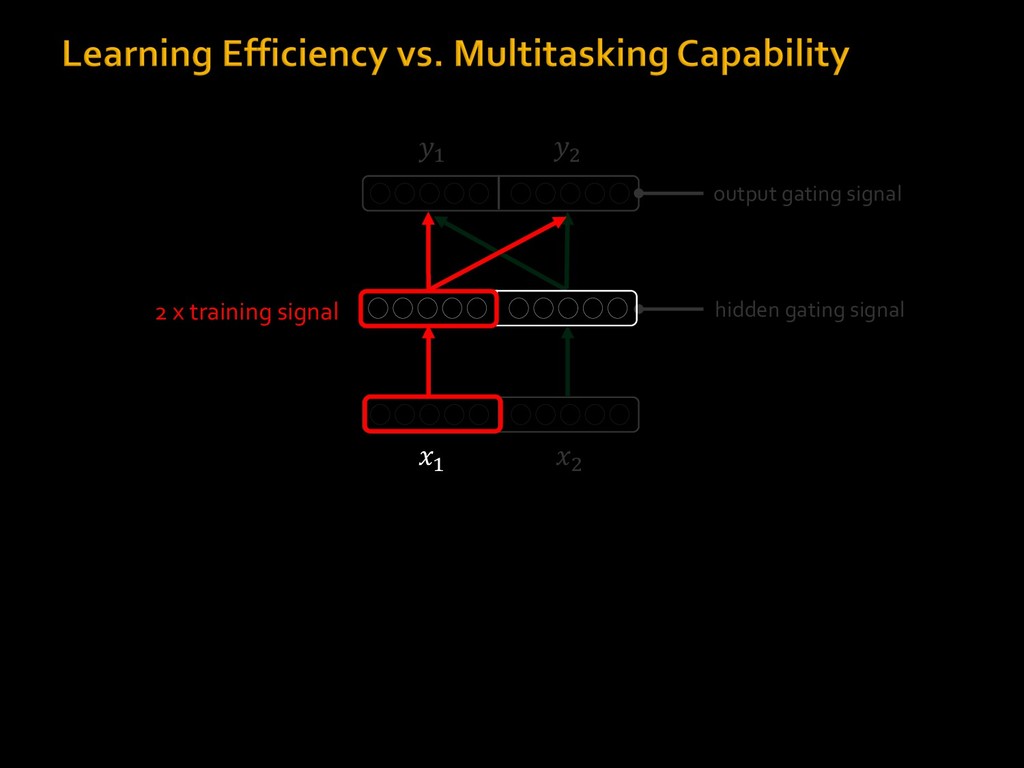
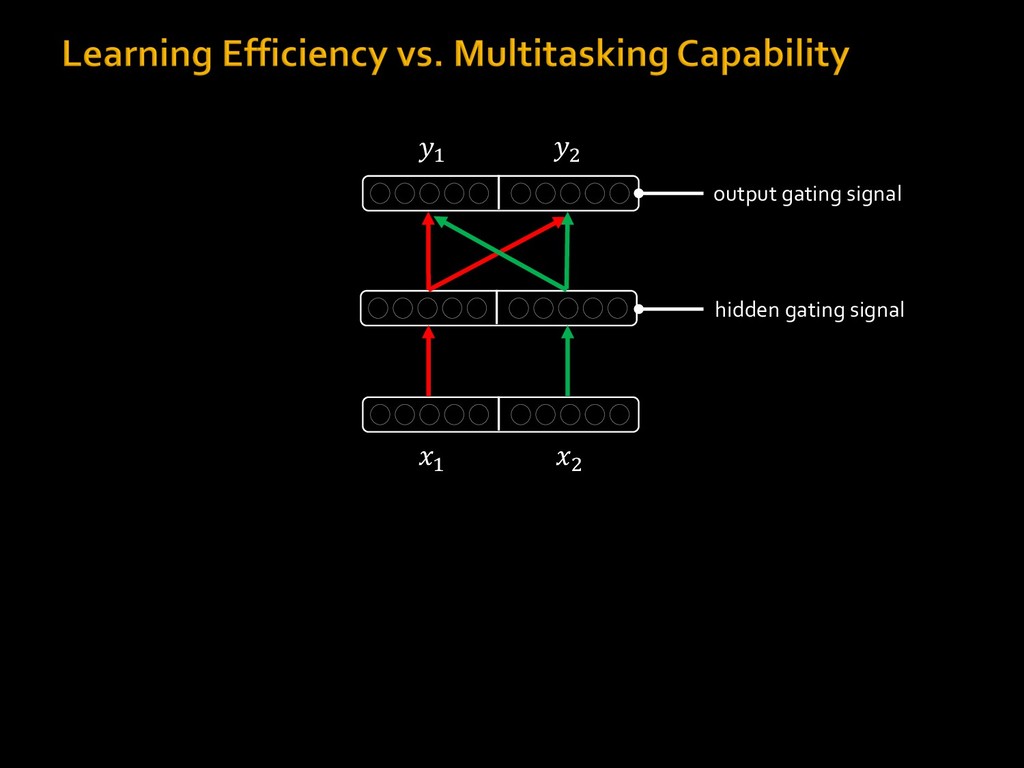
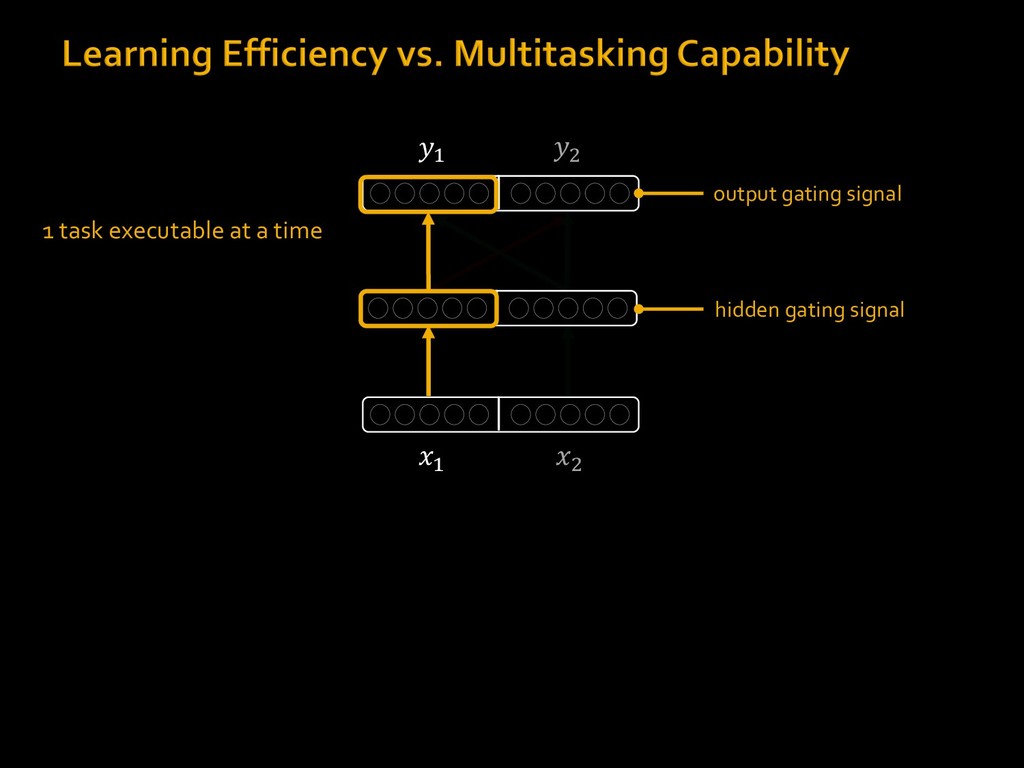
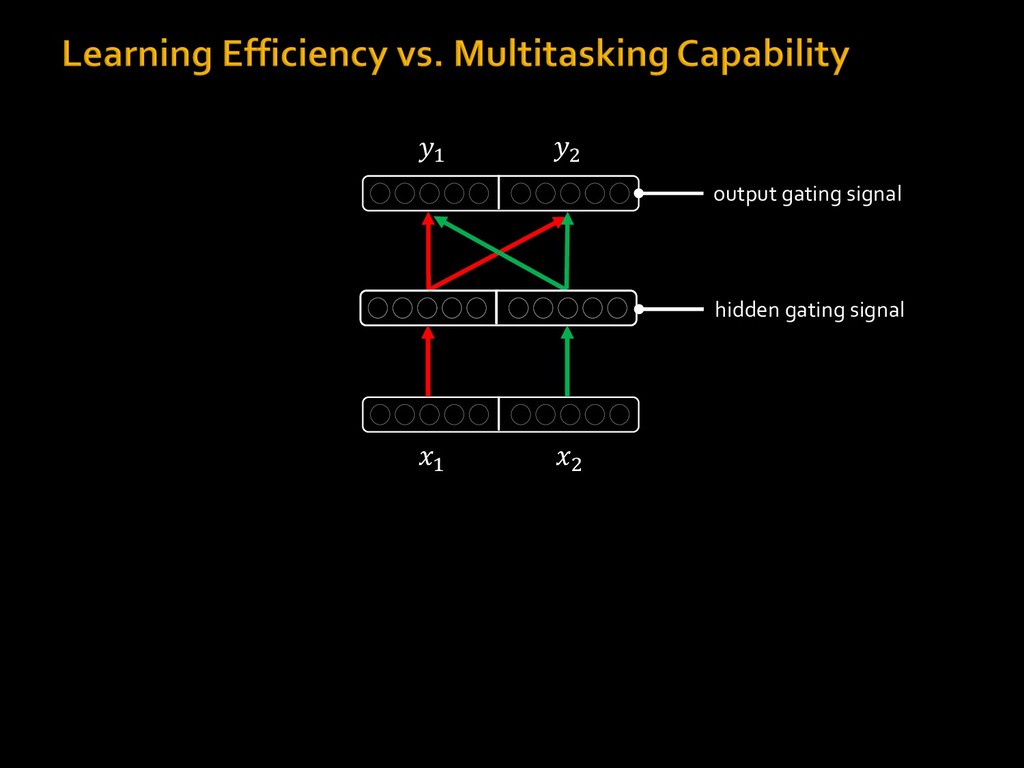
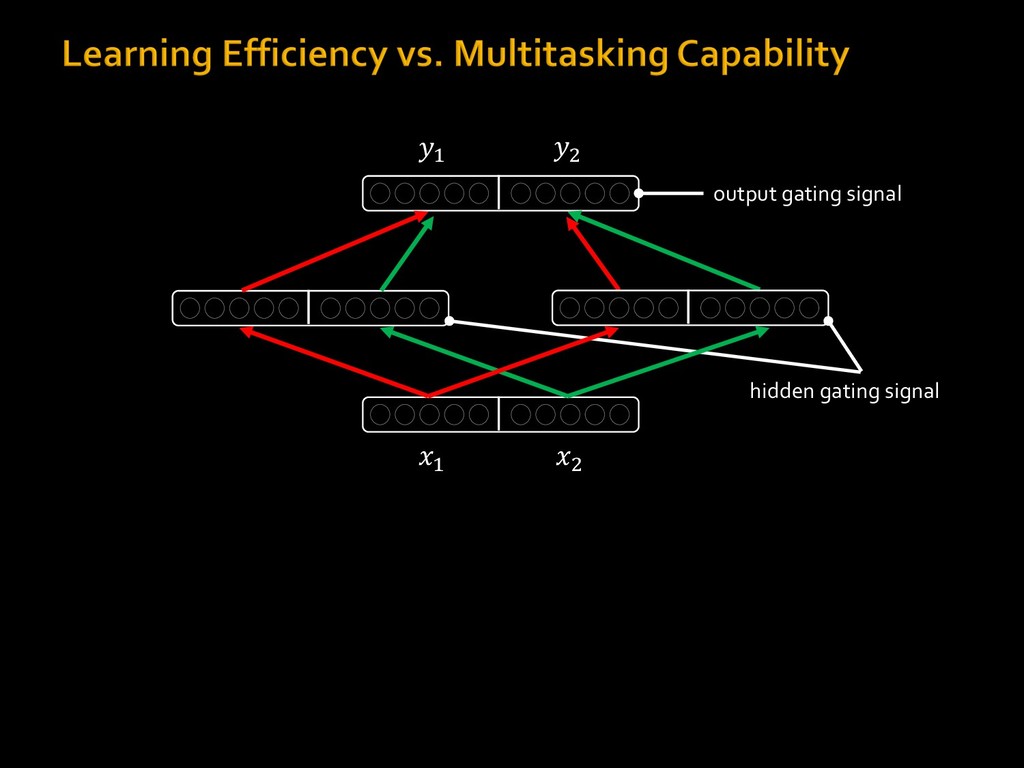
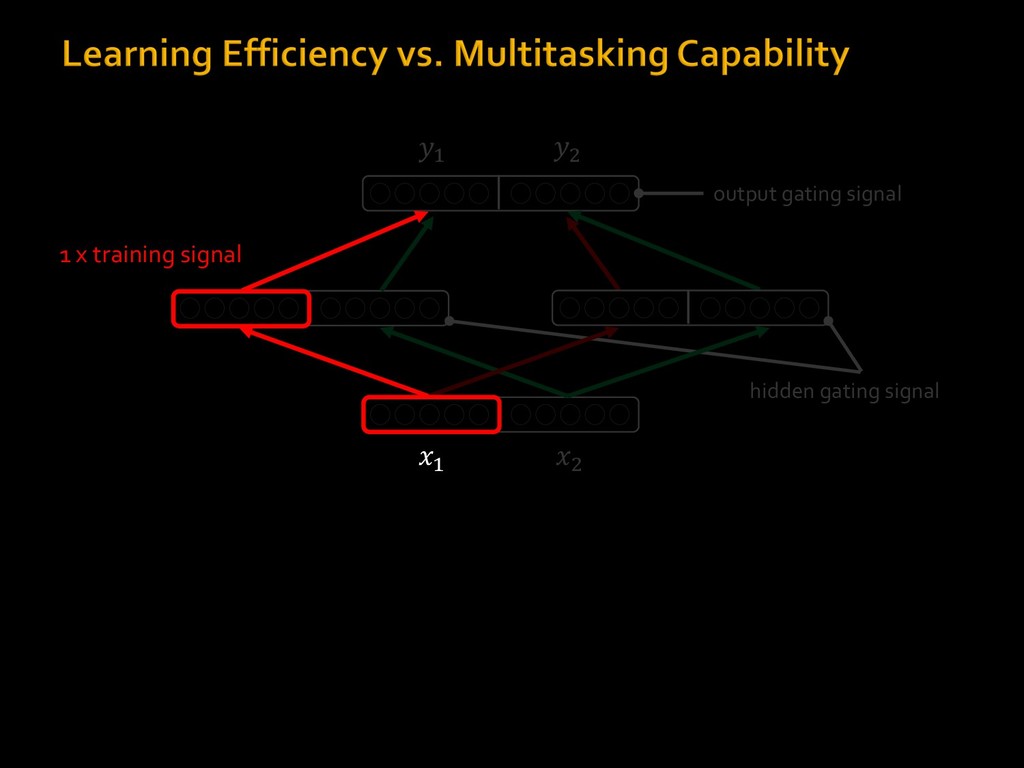
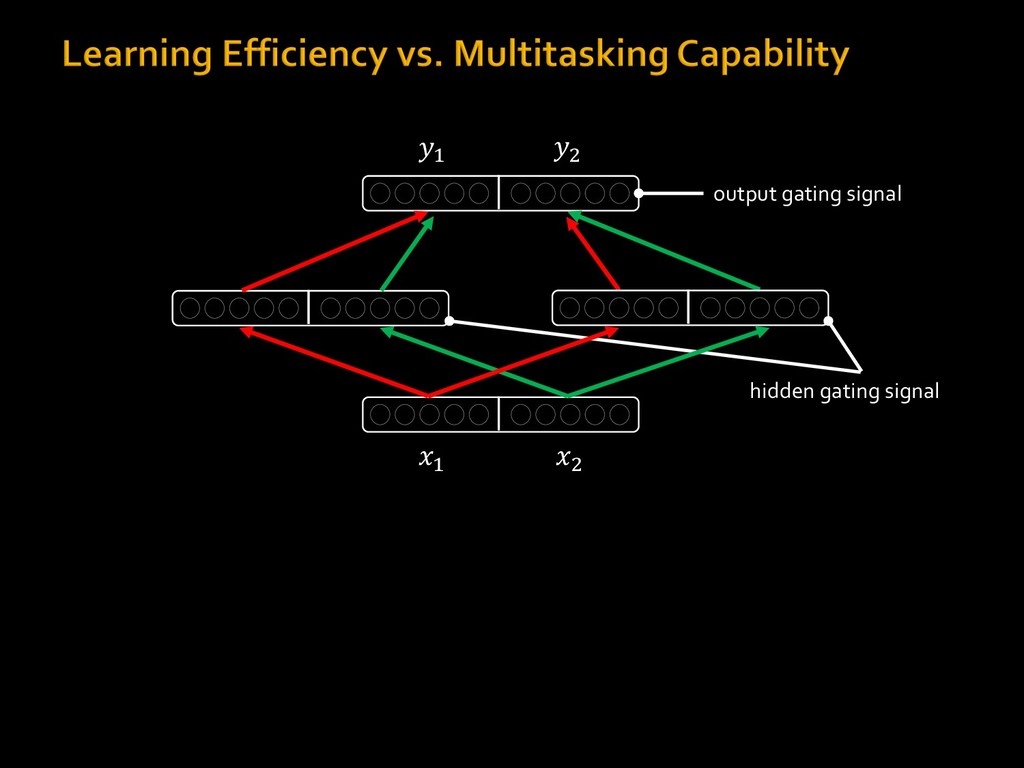
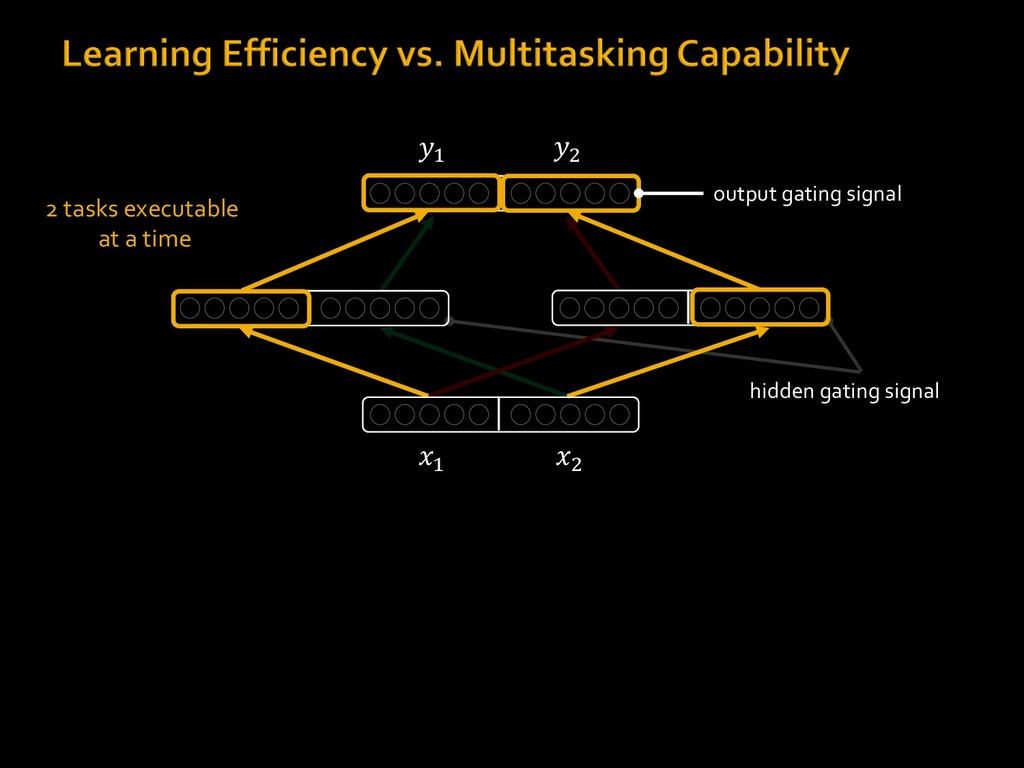
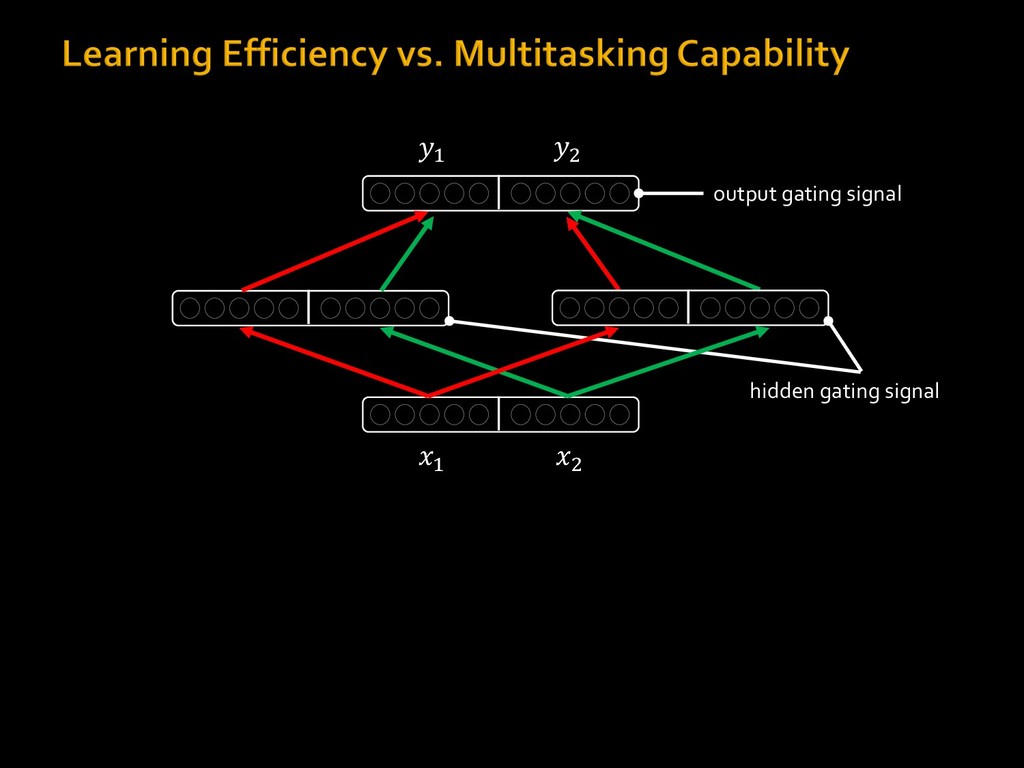
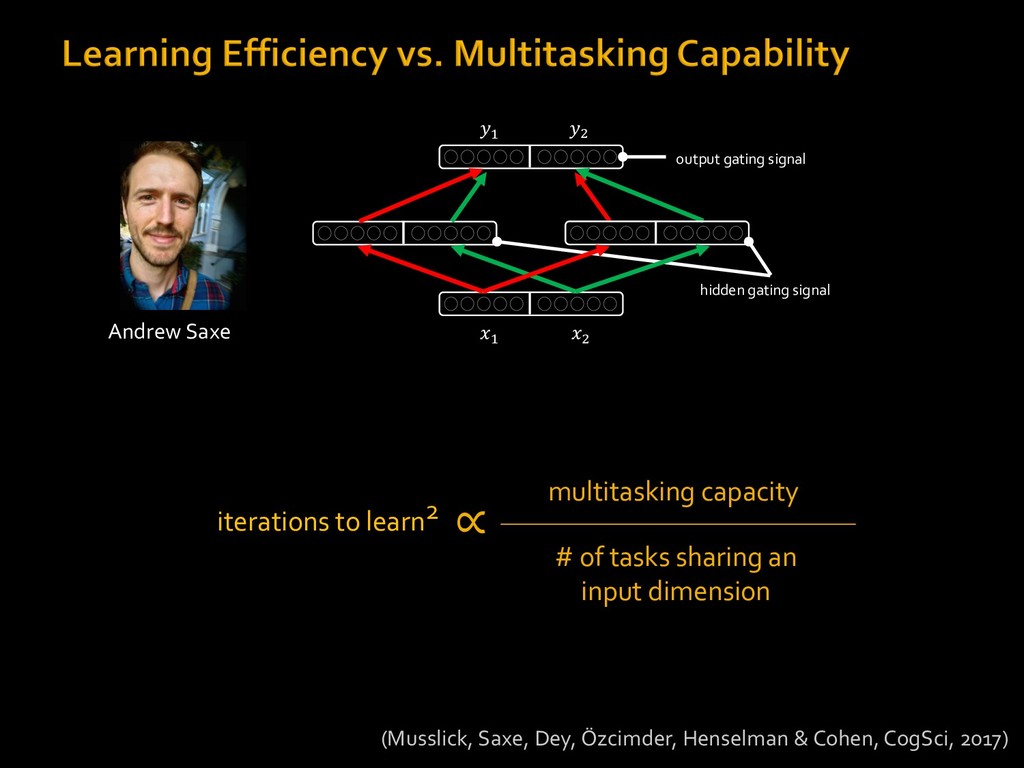
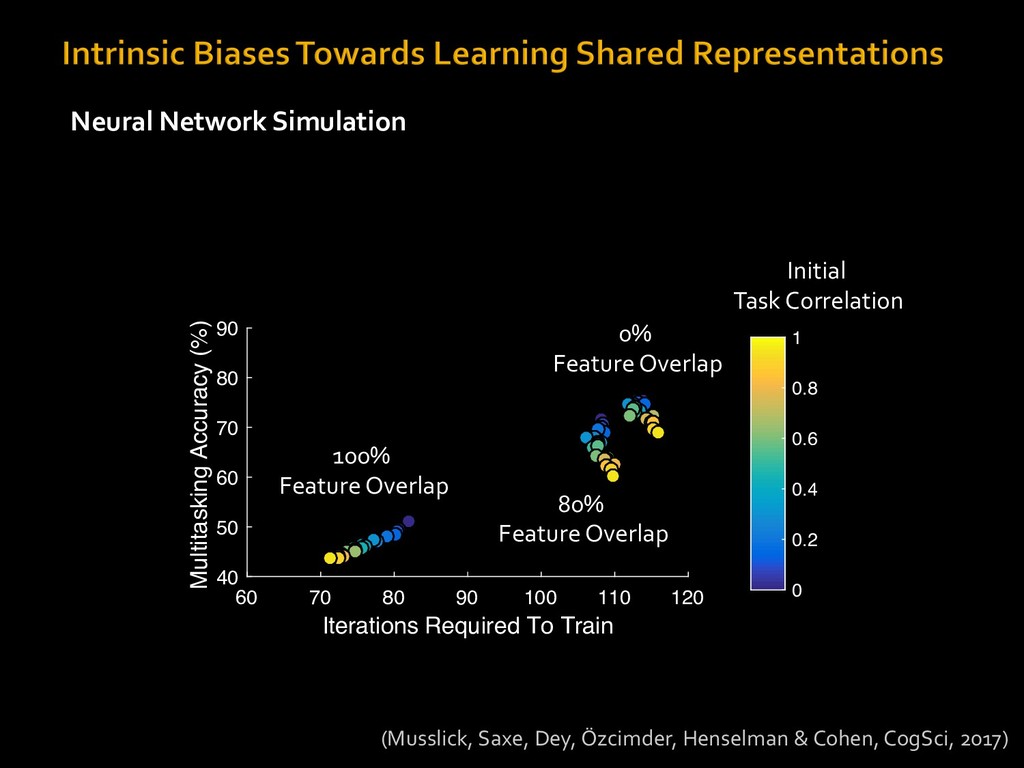
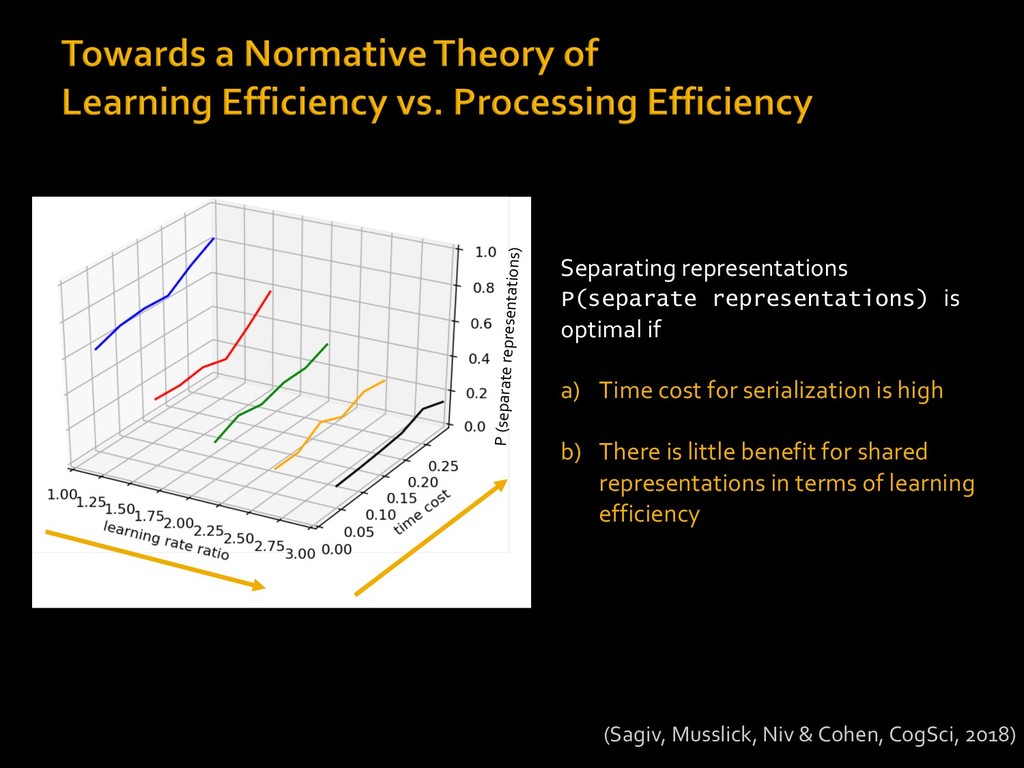
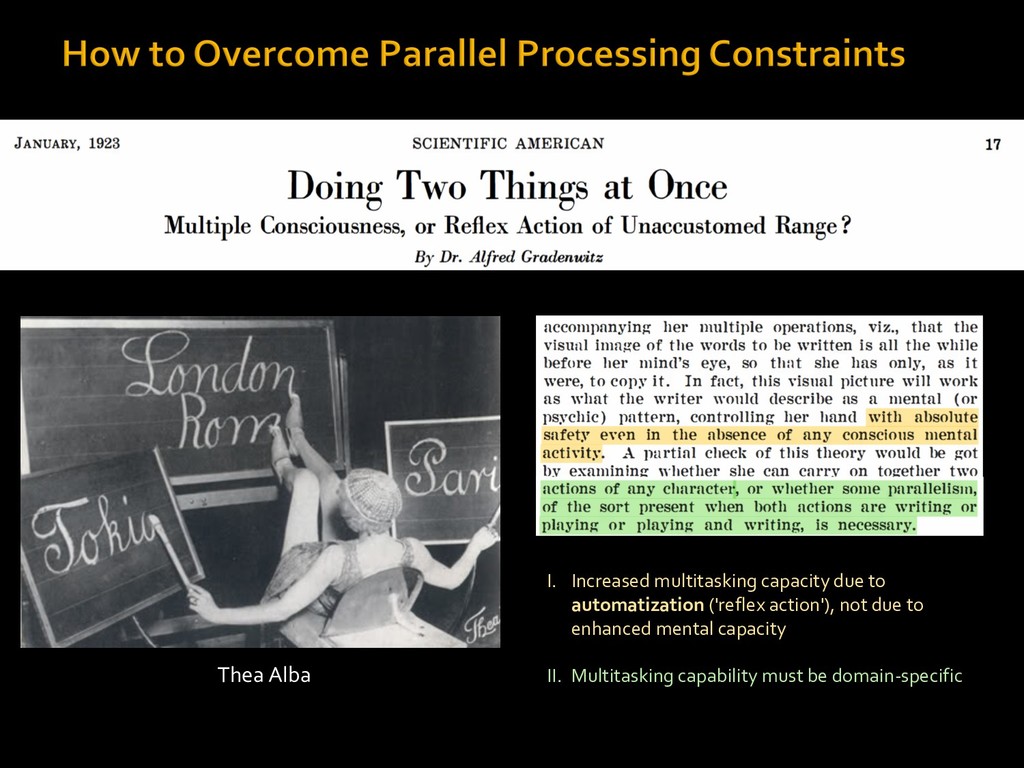
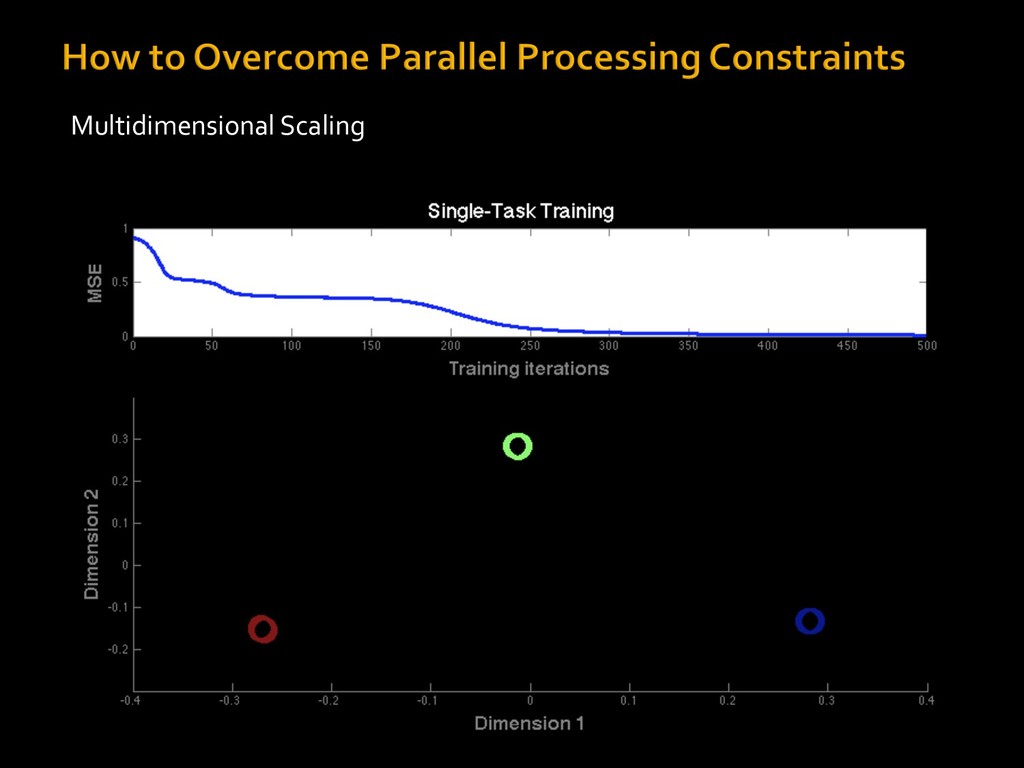
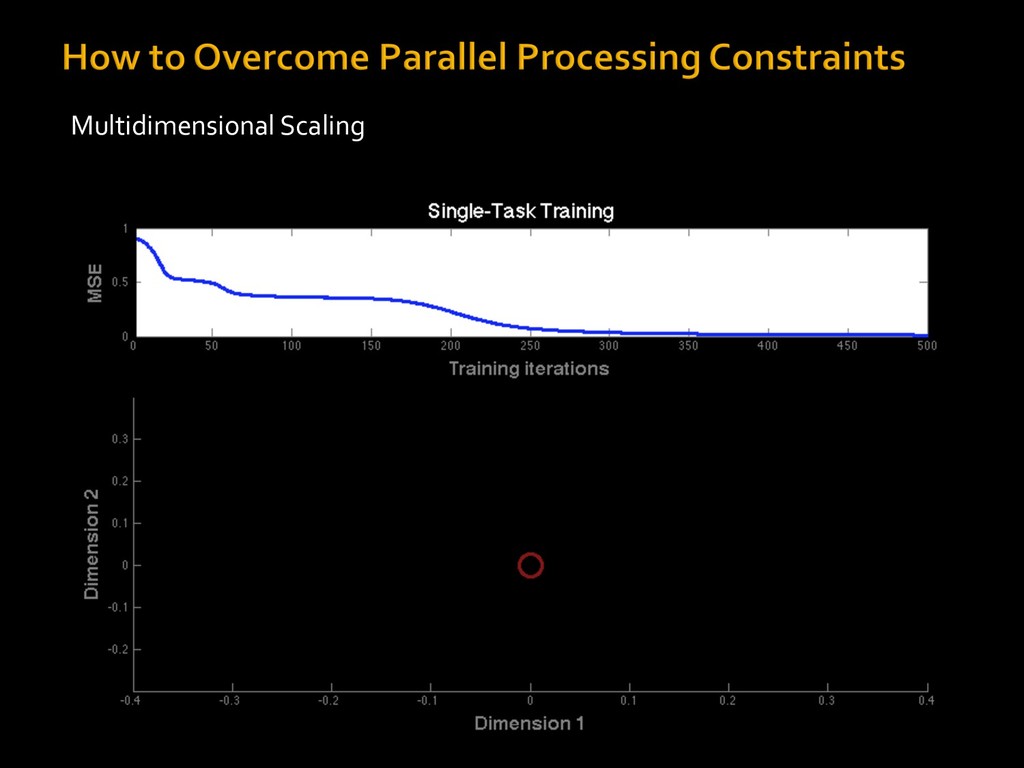
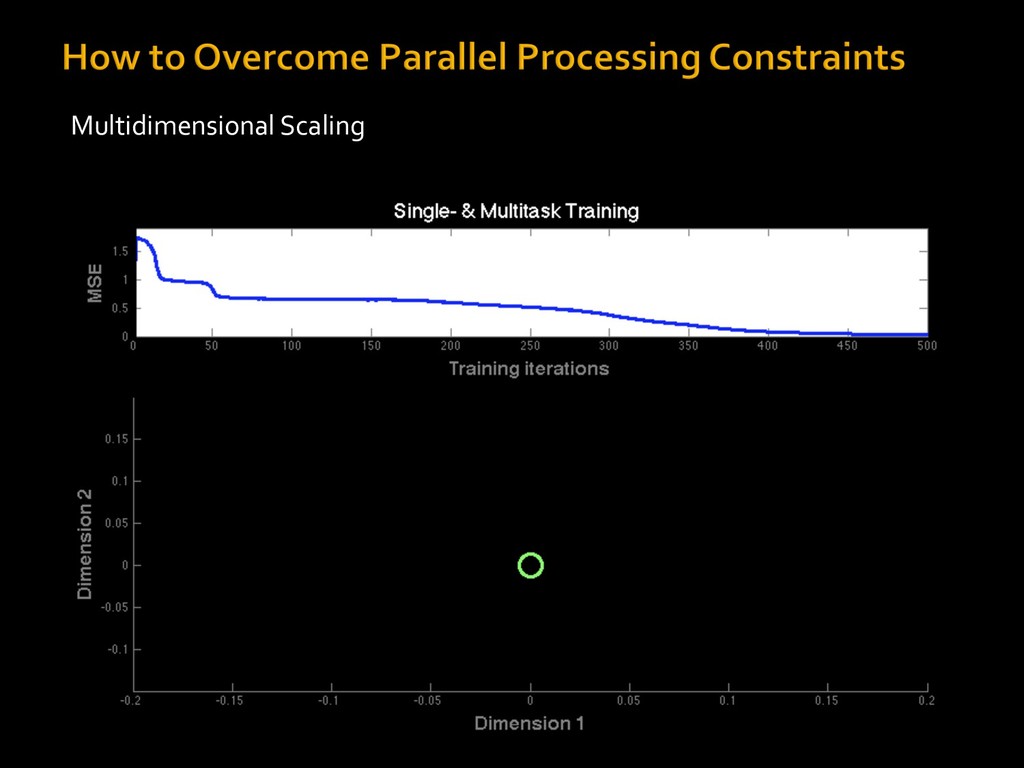
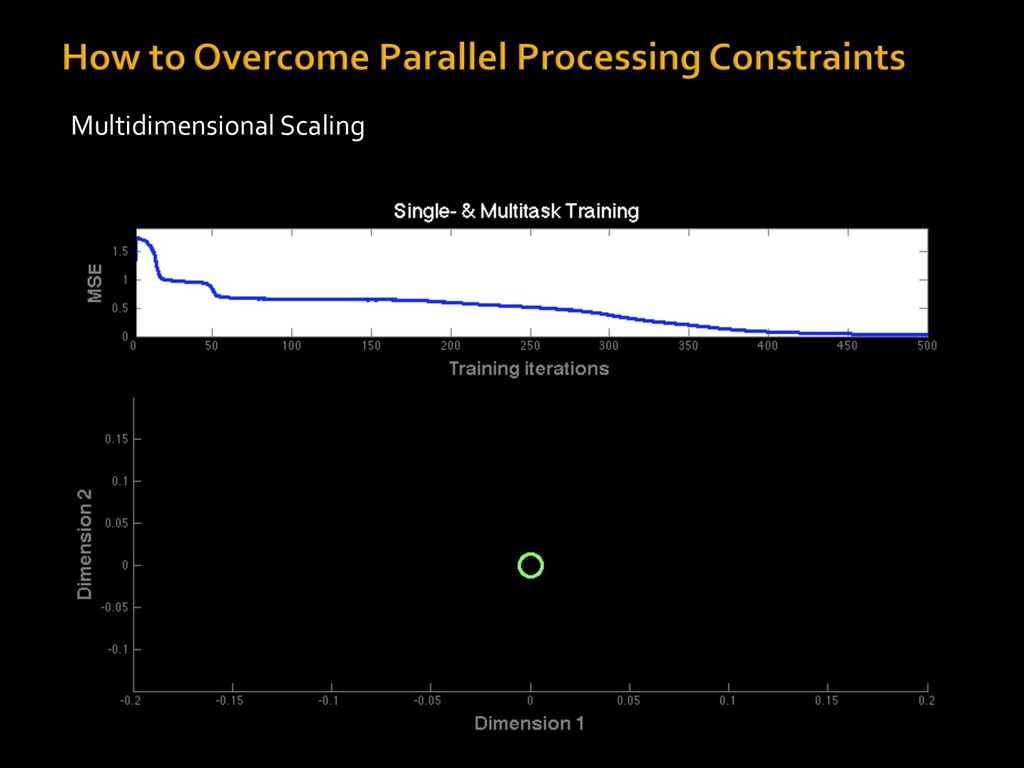
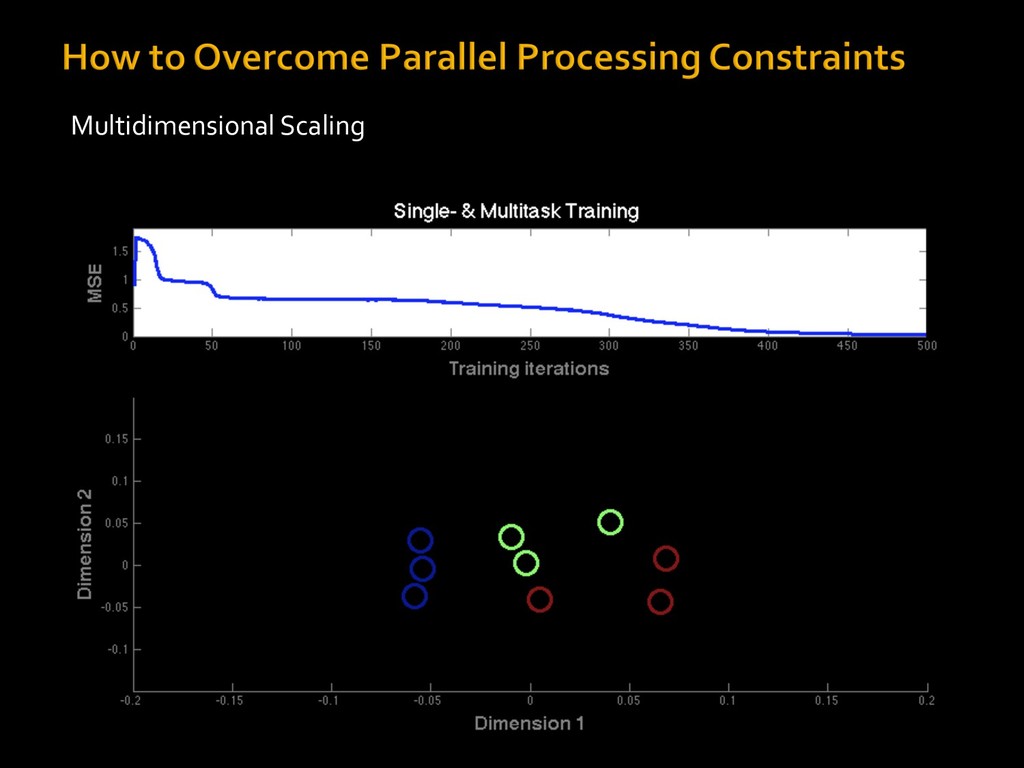
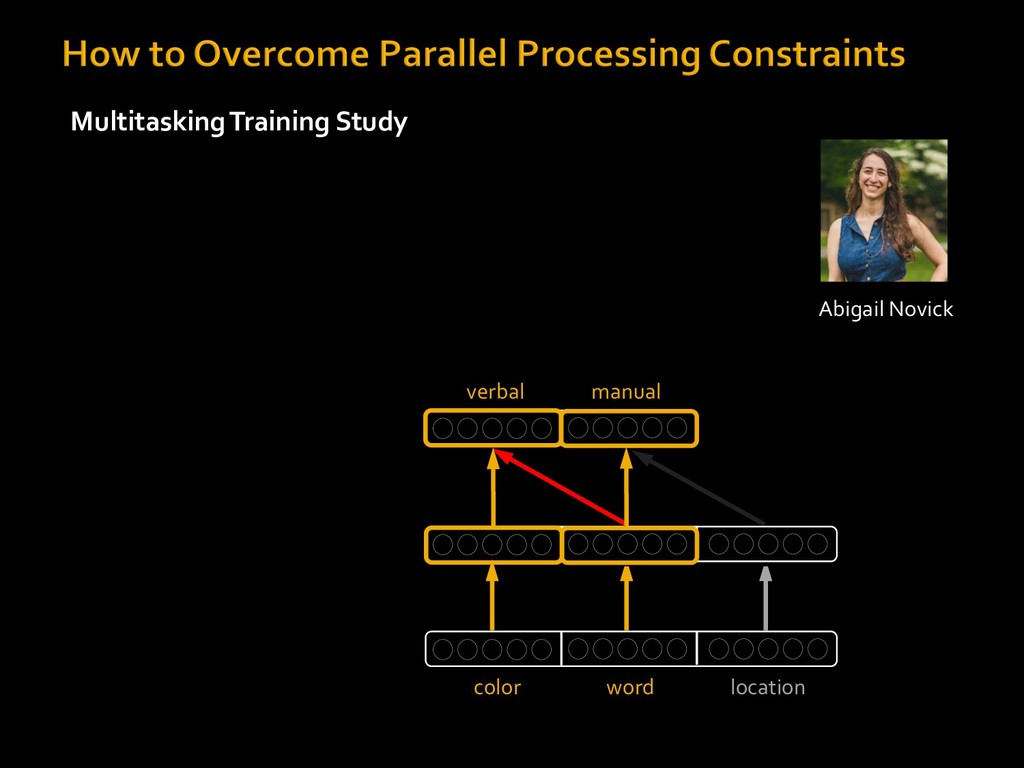
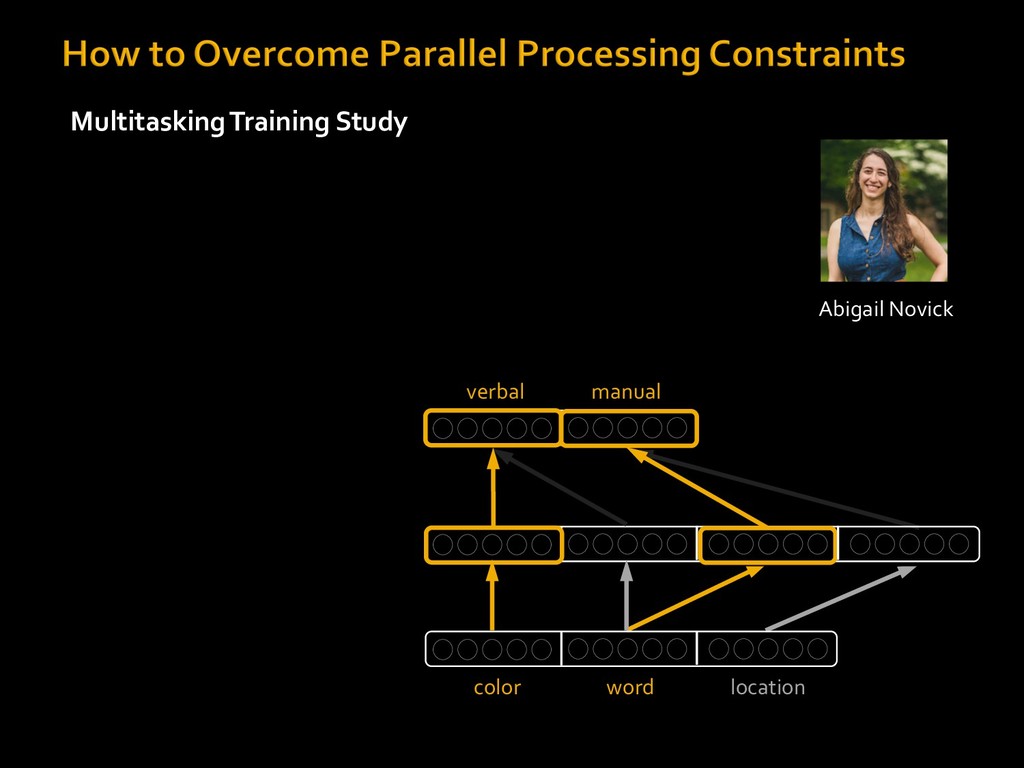
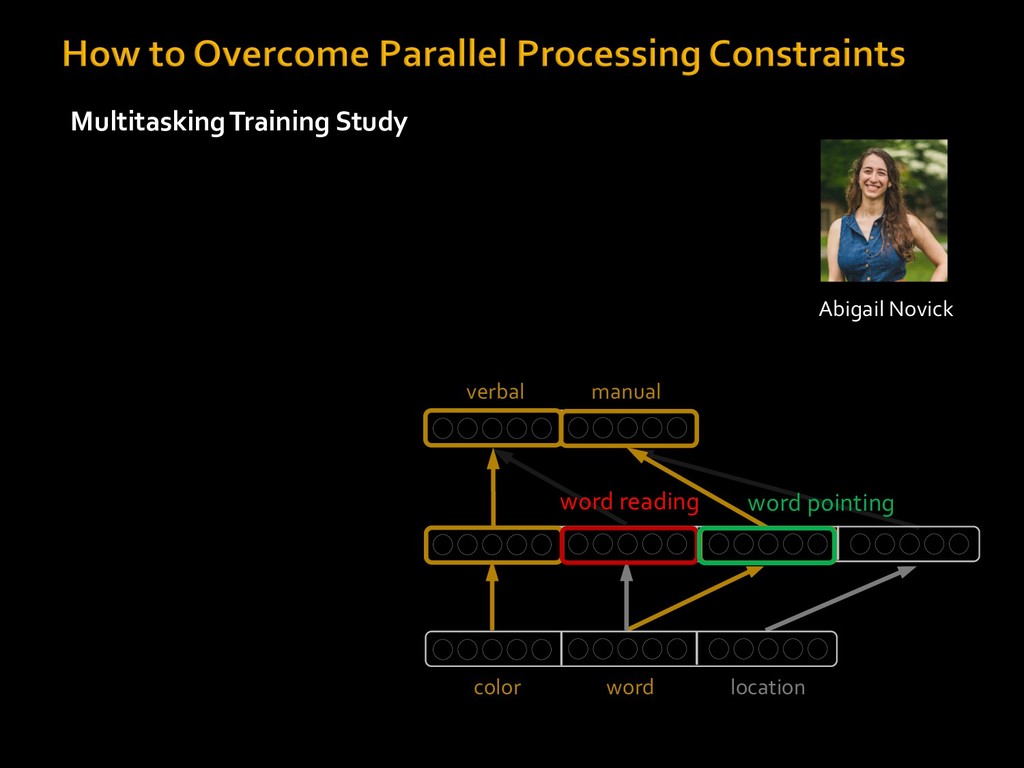
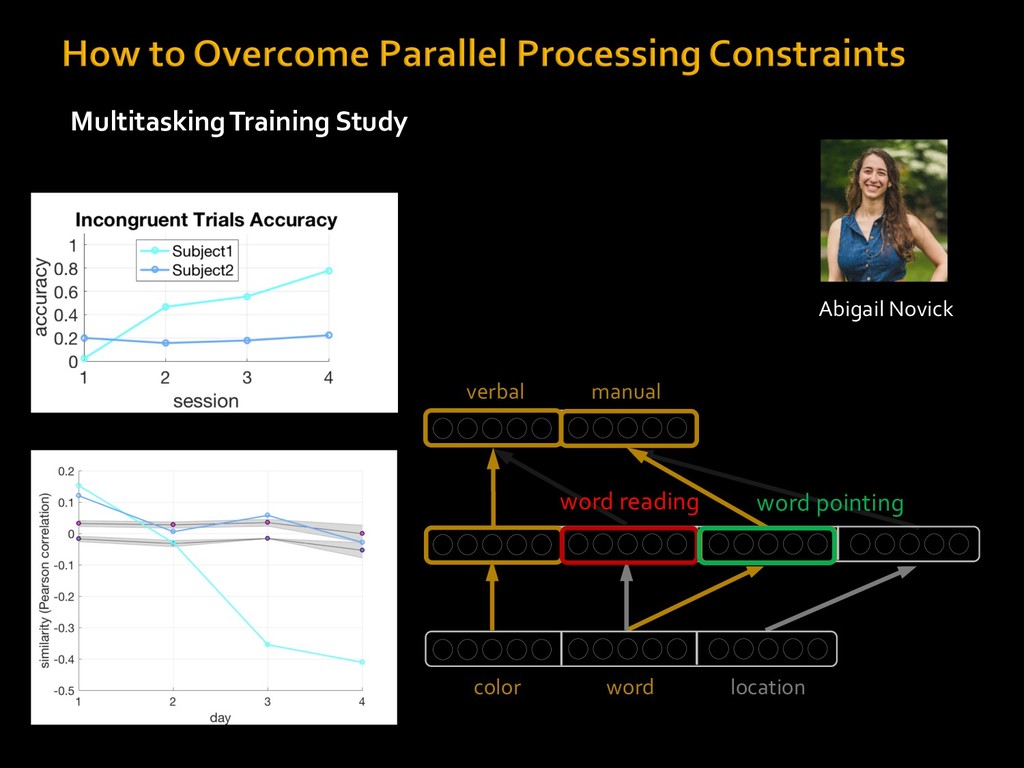
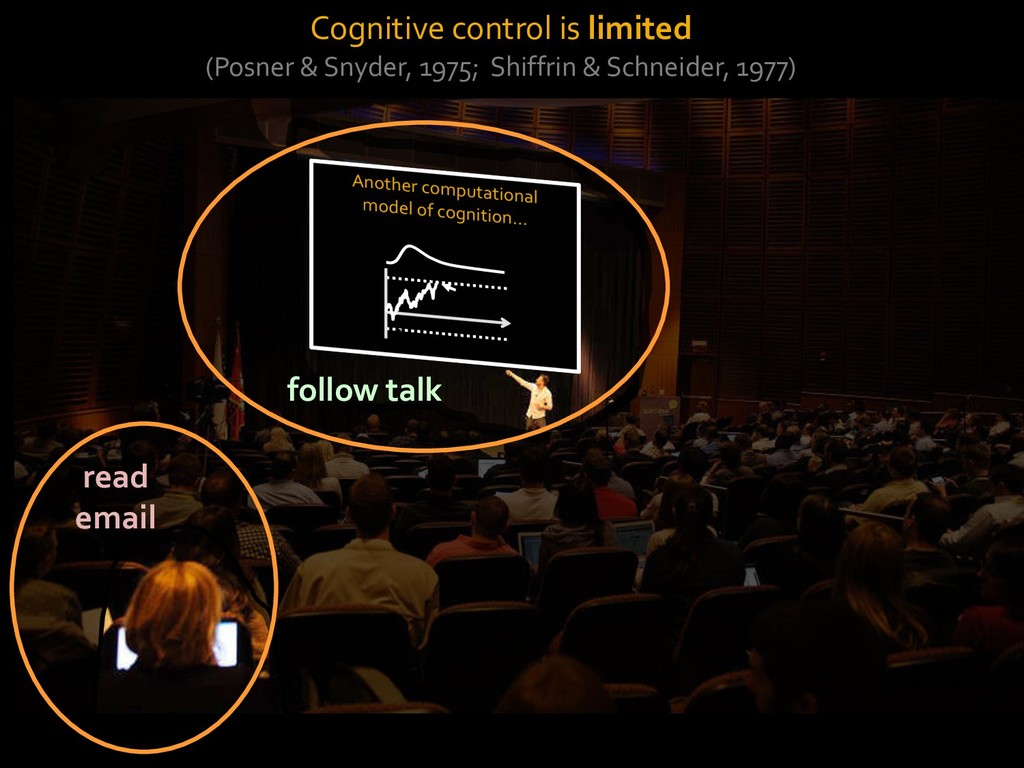
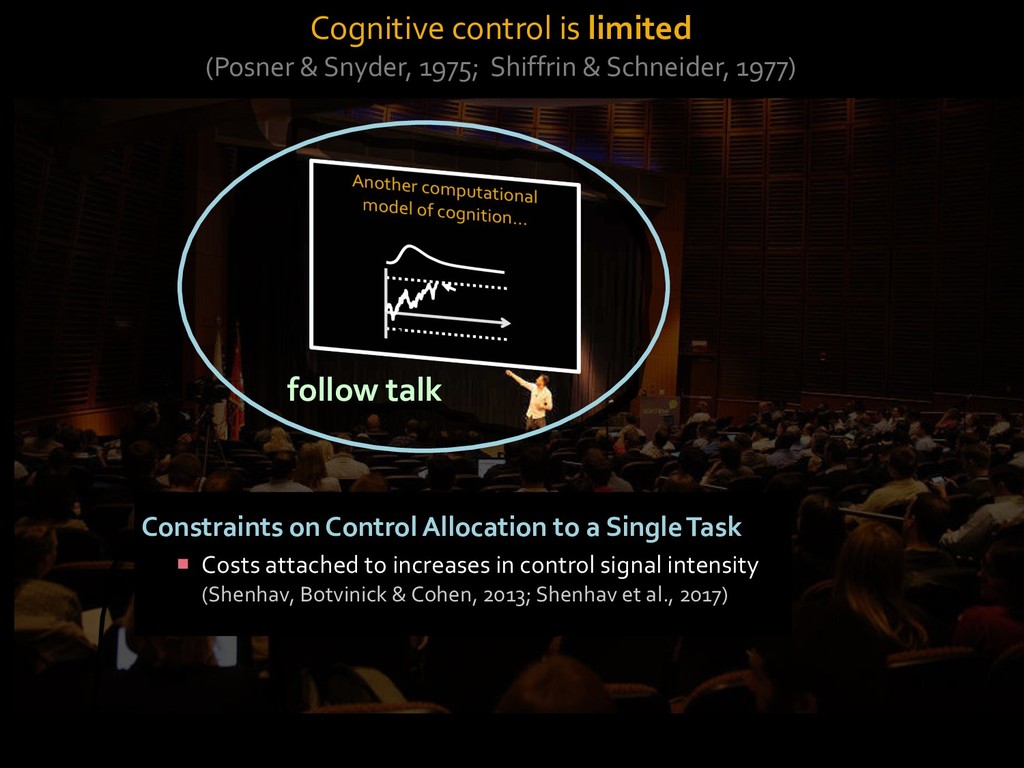
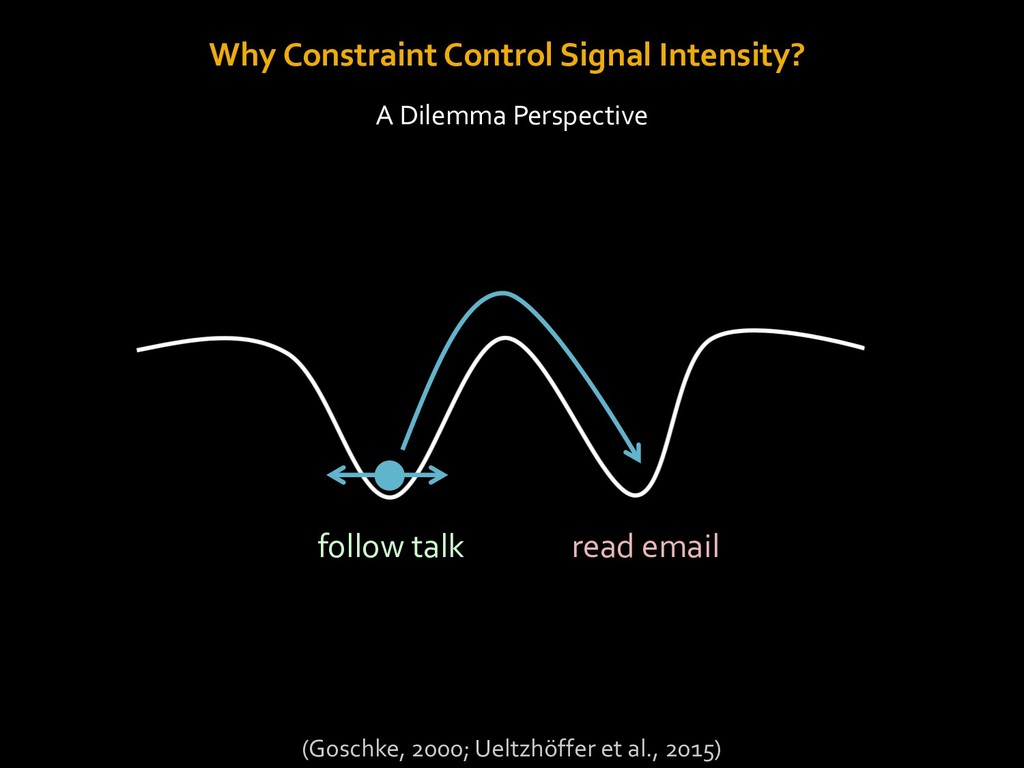
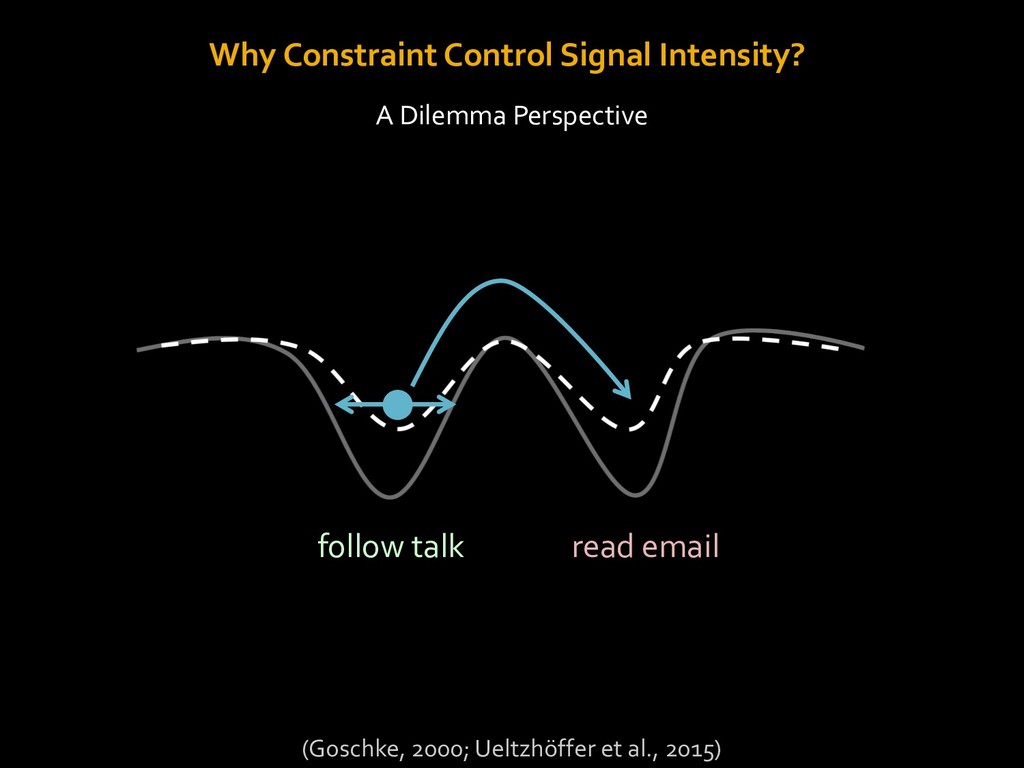
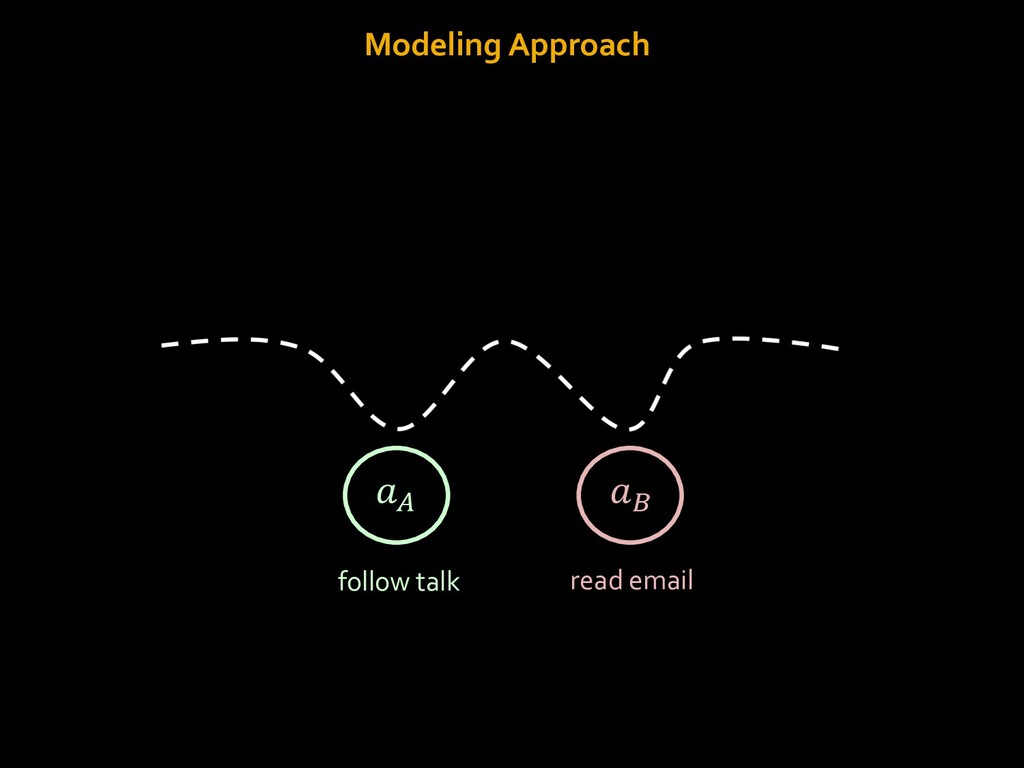
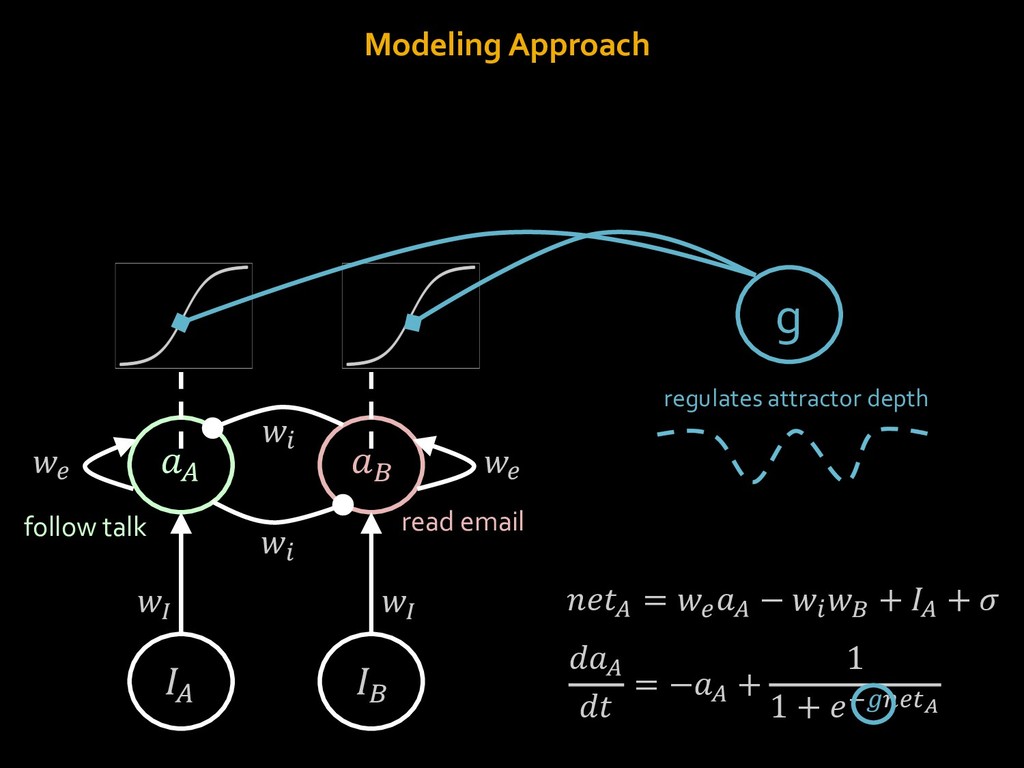
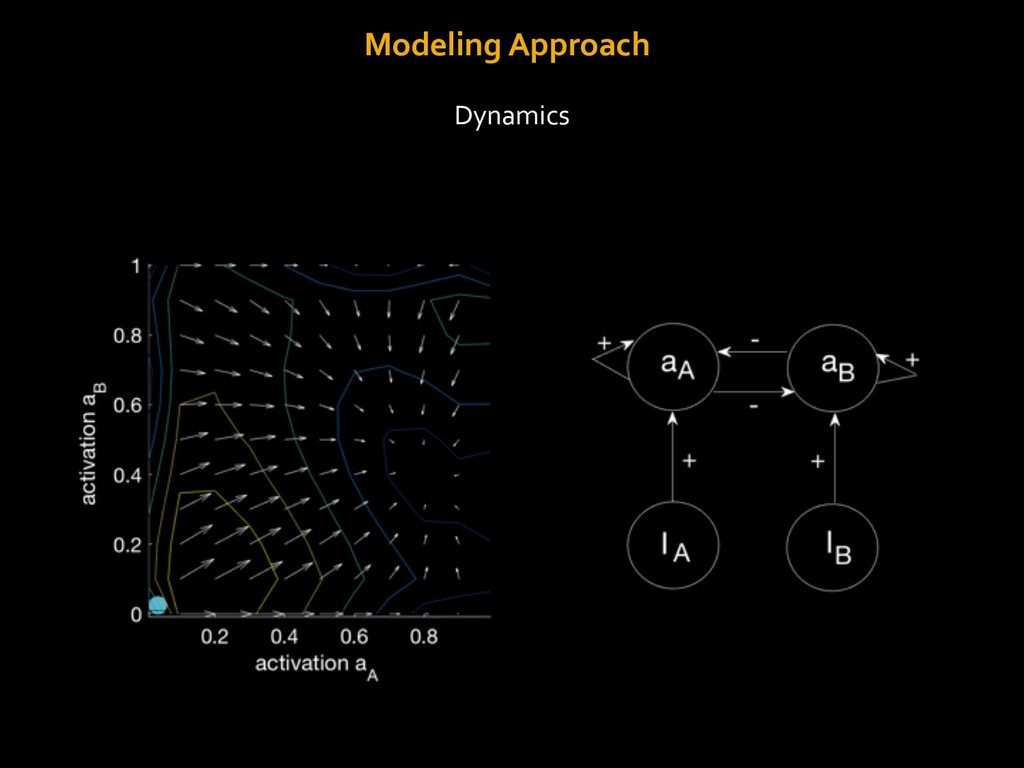
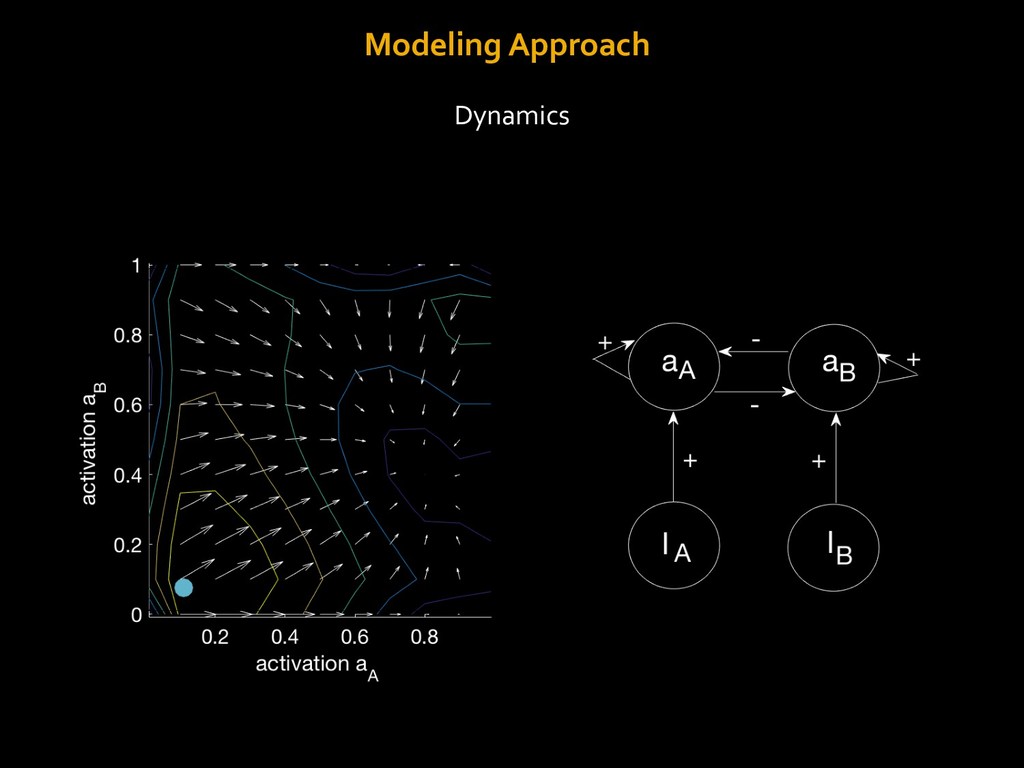
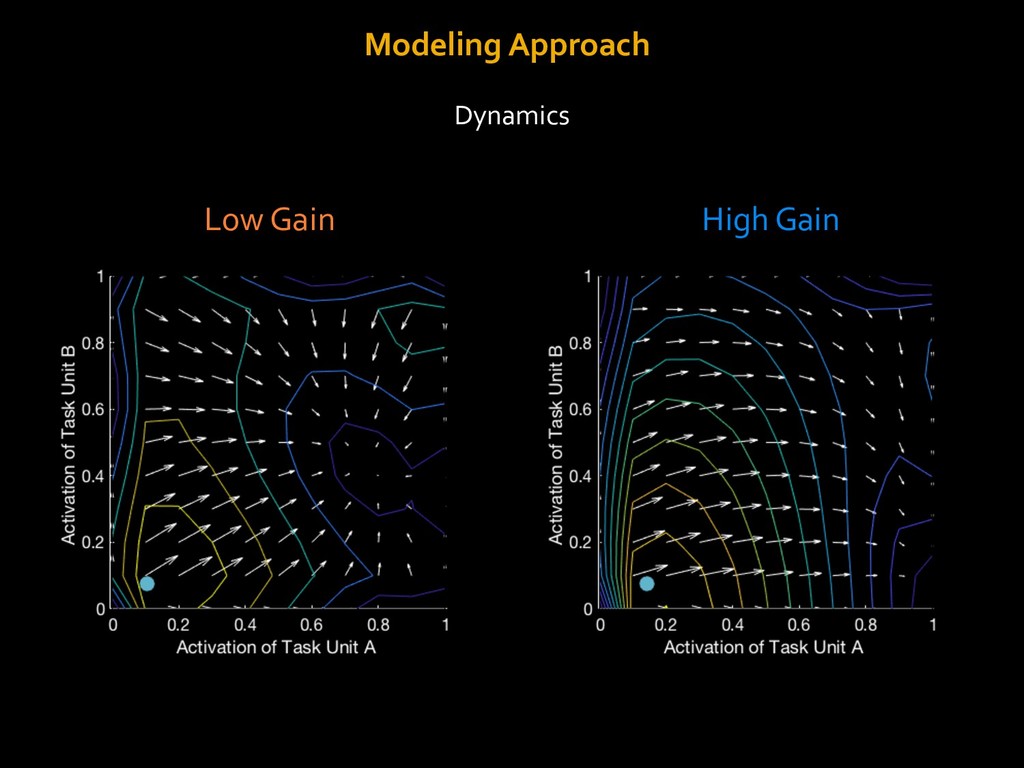
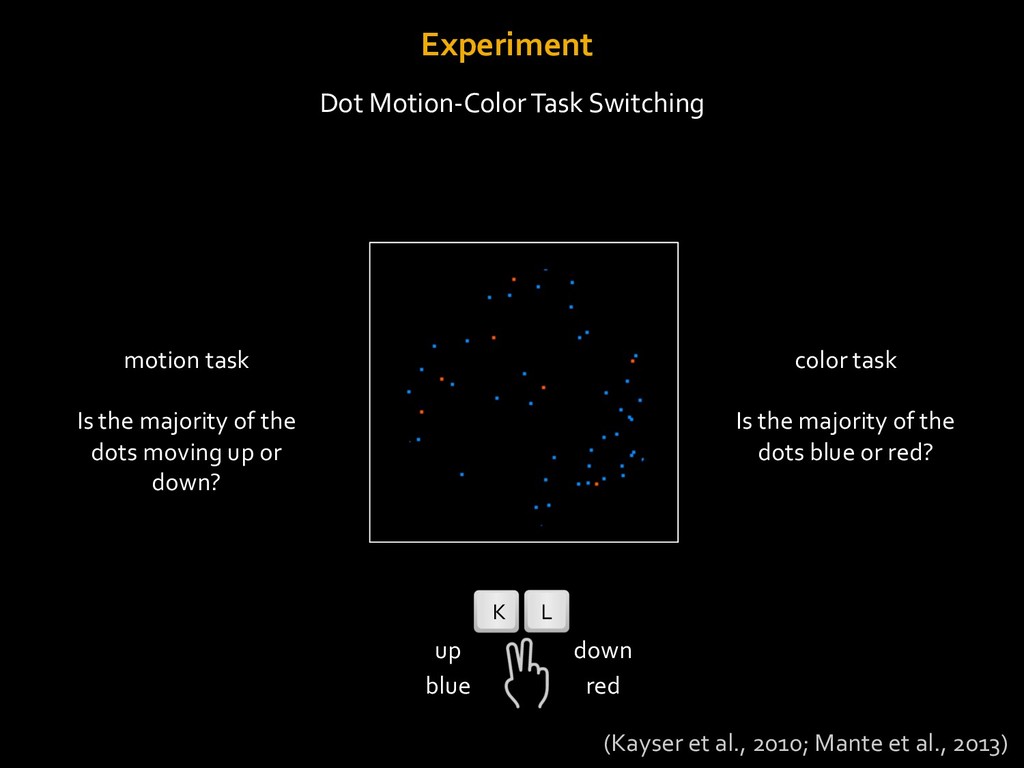
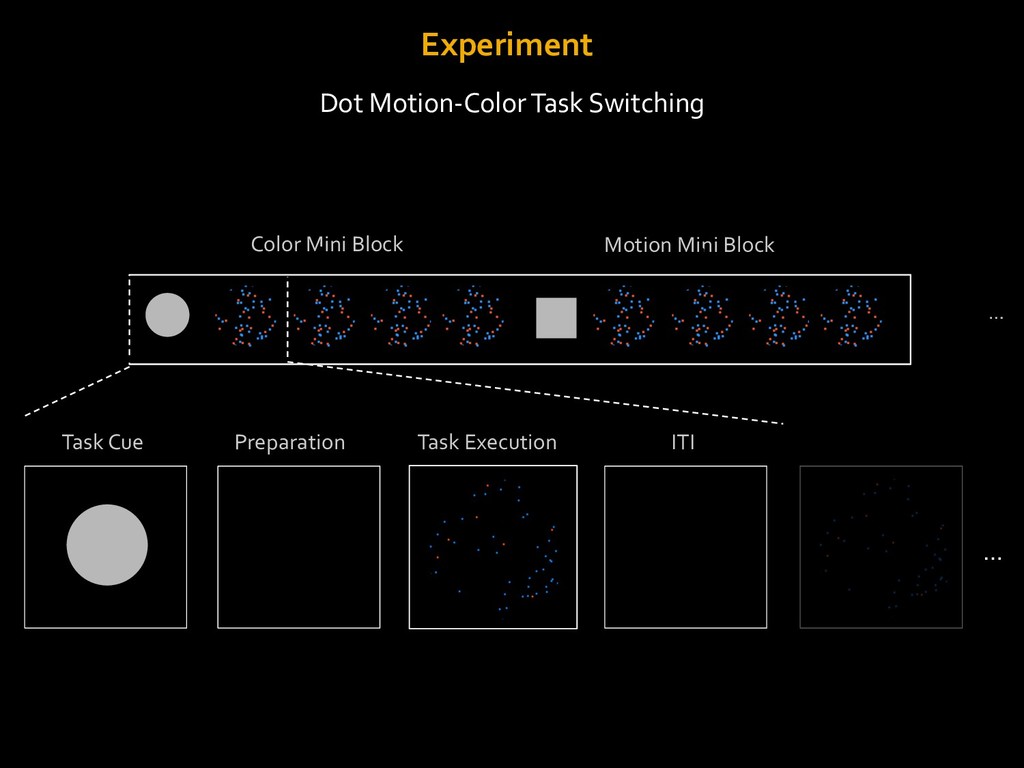
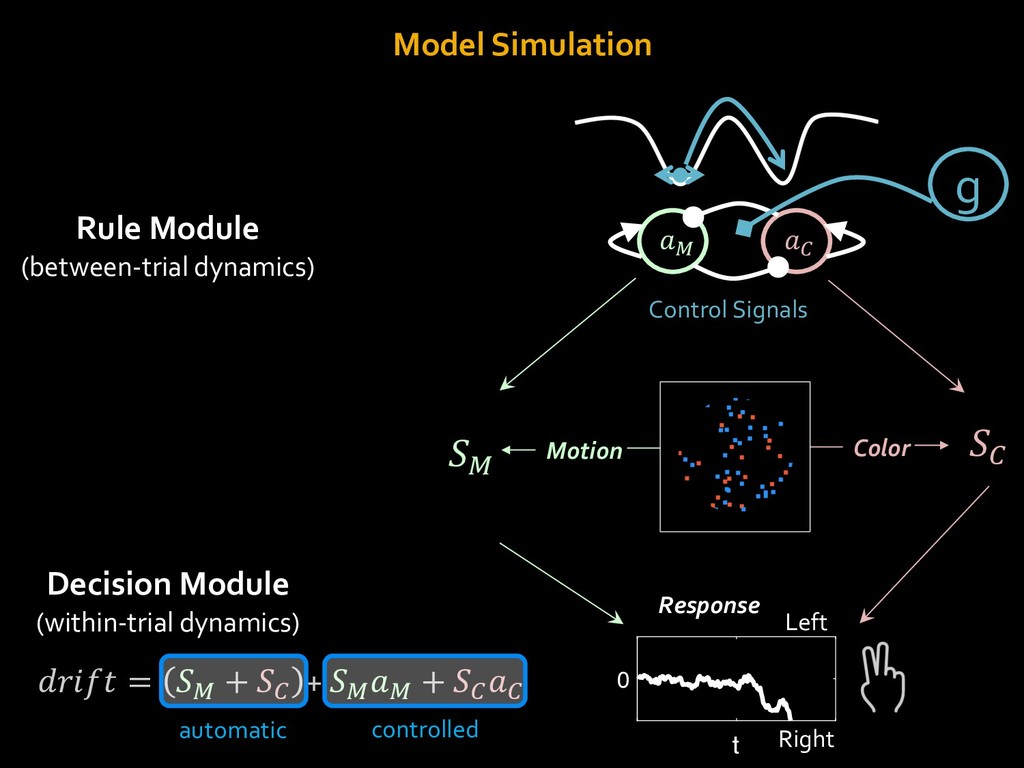
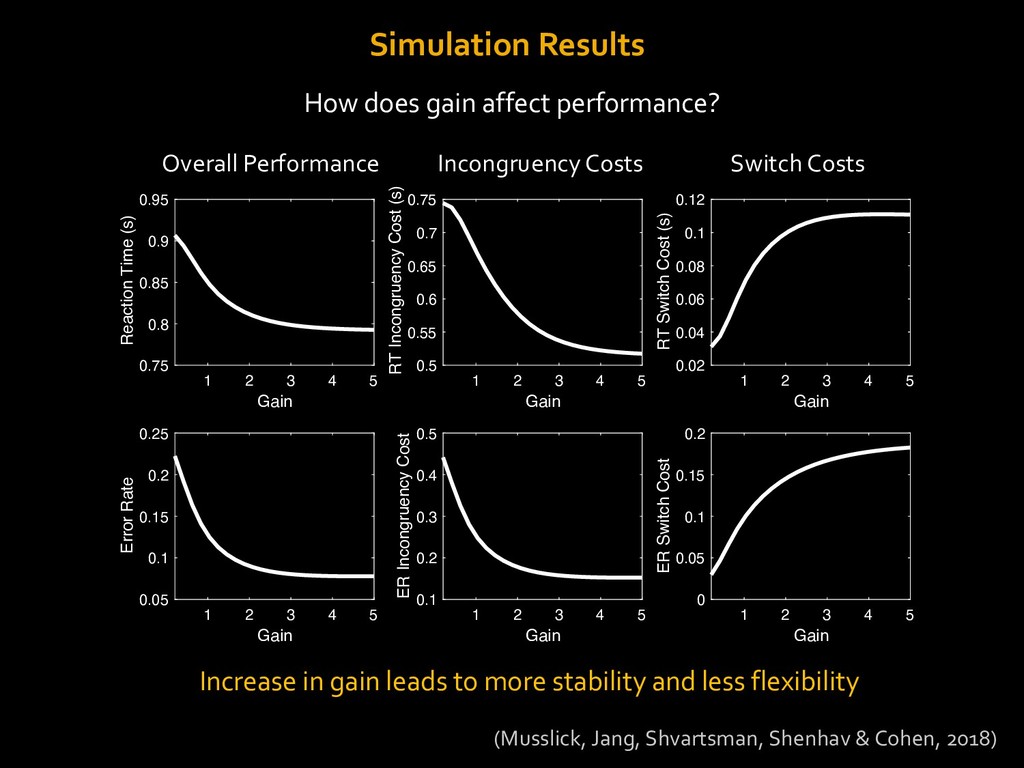
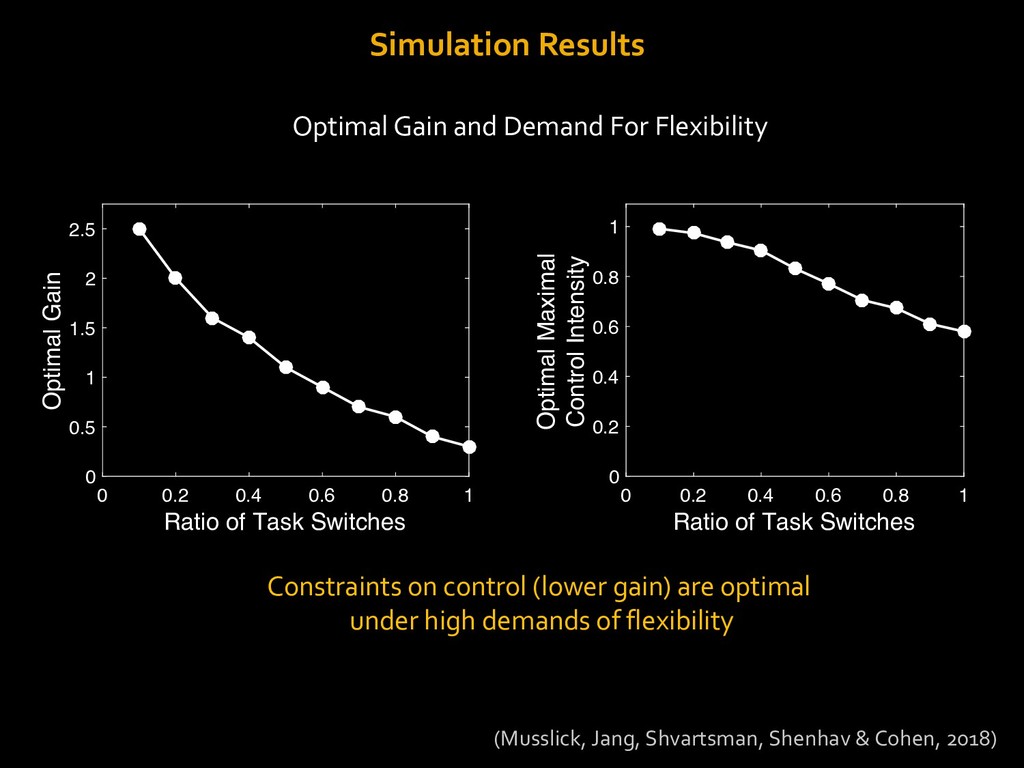
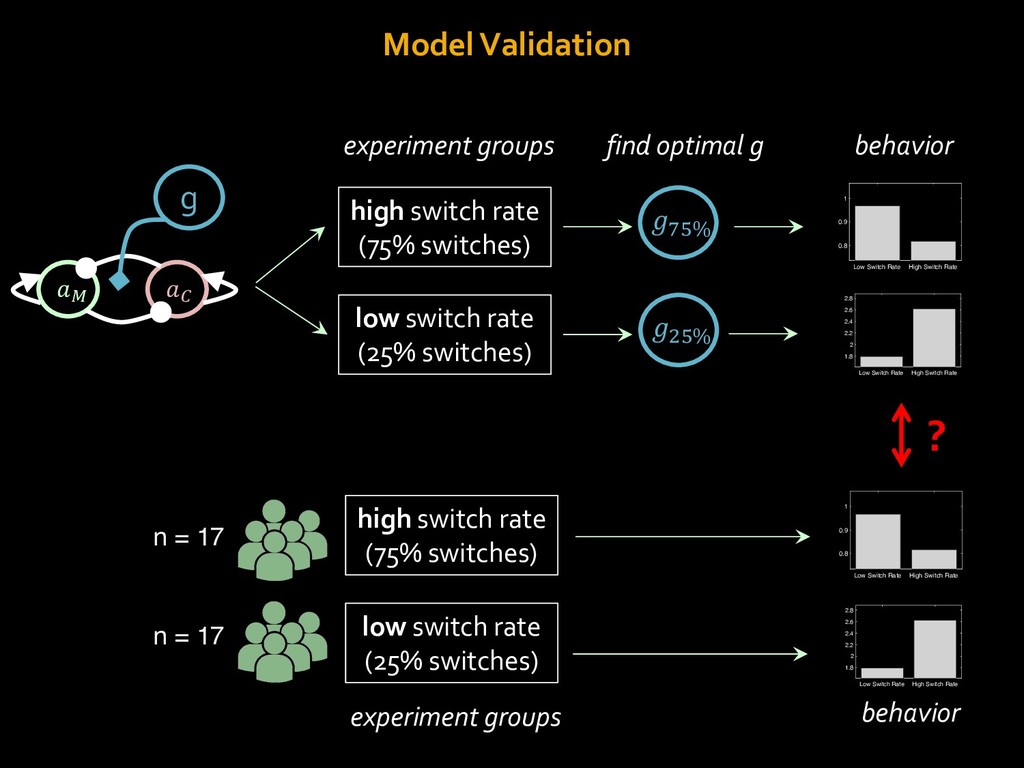
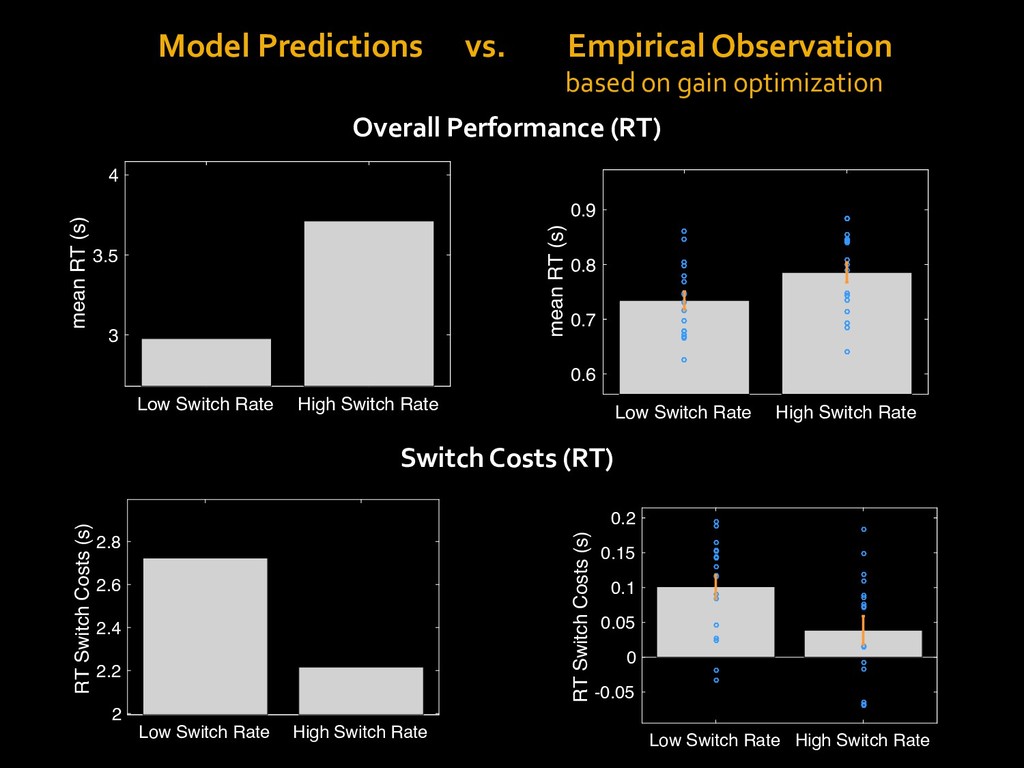
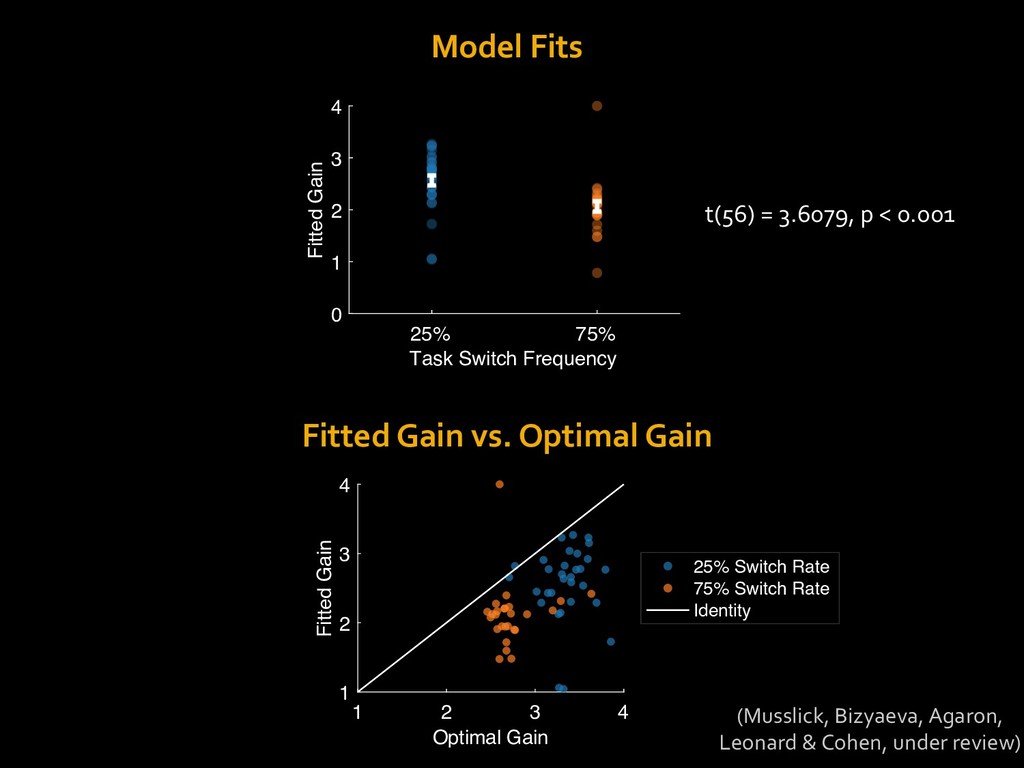
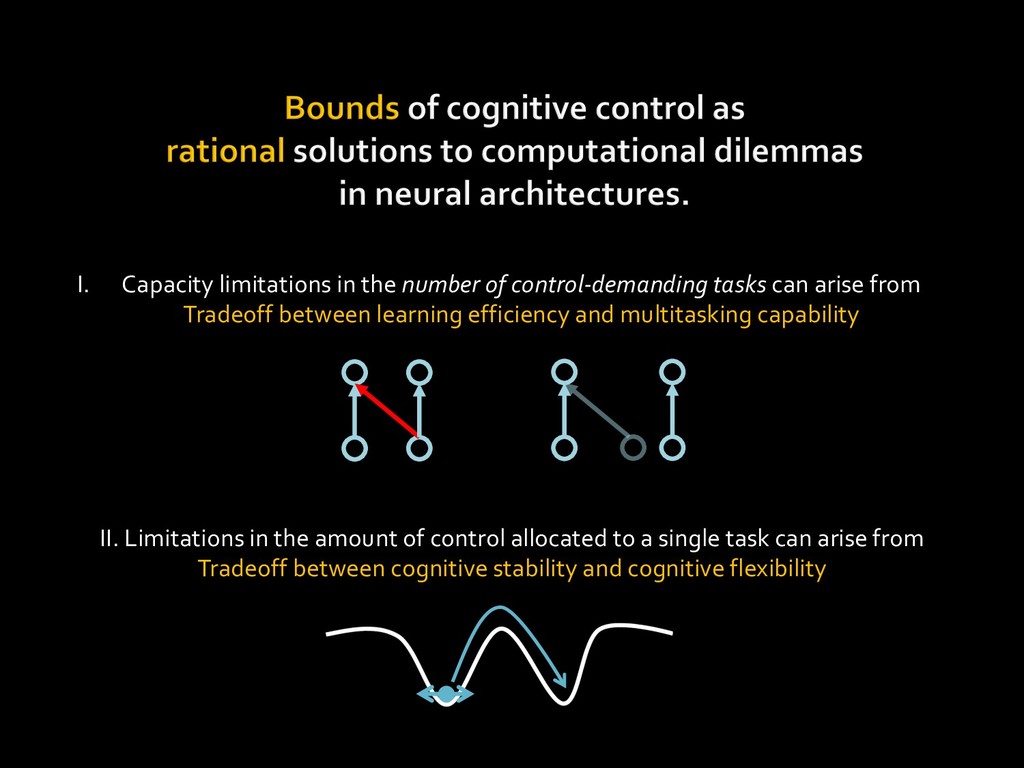
One of the most compelling characteristics of controlled processing is our limitation to exercise it. These limitations have become a fundamental concept in general theories of cognition that explain idiosyncrasies of human performance in terms of rational adaptations to a) the limited number of control-dependent tasks that can be executed simultaneously and b) constraints on the amount of cognitive control that can be allocated to a single task. However, this leaves open the question of why such constraints would exist in the first place. In this talk I will explore the hypothesis that the bounds of cognitive control reflect, at least in part, rational solutions to two fundamental computational dilemmas in neural network architectures. Using neural network simulations and behavioral experiments I will first demonstrate that neural architectures are subject to a tradeoff between learning efficiency that is promoted through the use of shared task representations, on the one hand, and multitasking capability that is achieved through the separation of task representations, on the other hand. The commonly-observed trajectory from controlled to automatic processing during learning may therefore reflect a rational optimization of this tradeoff: shared representations initially afford a bias toward efficient learning in novel task environments at the expense of seriality and control-dependence; but experience in environments where multitasking affords sufficient advantage ultimately promotes acquisition of separated, task-dedicated representations. As a consequence, executing multiple control-demanding tasks may only occur in serial, through flexible switching between tasks. The serial execution of tasks, however, gives rise to another tradeoff known as the stability-flexibility dilemma: allocating more control to a task results in greater activation of its neural representation but also in greater persistence of this activity upon switching to a new task, yielding switch costs. In the second part of this talk I will demonstrate that constraints on the amount of cognitive control allocated to a single task can reflect a rational solution to this dilemma. Based on these results I will argue that the study of computational dilemmas in neural systems may hold promise to uncover normative explanations for the seemingly irrational constraints on cognitive control, as well as human cognition in general.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}