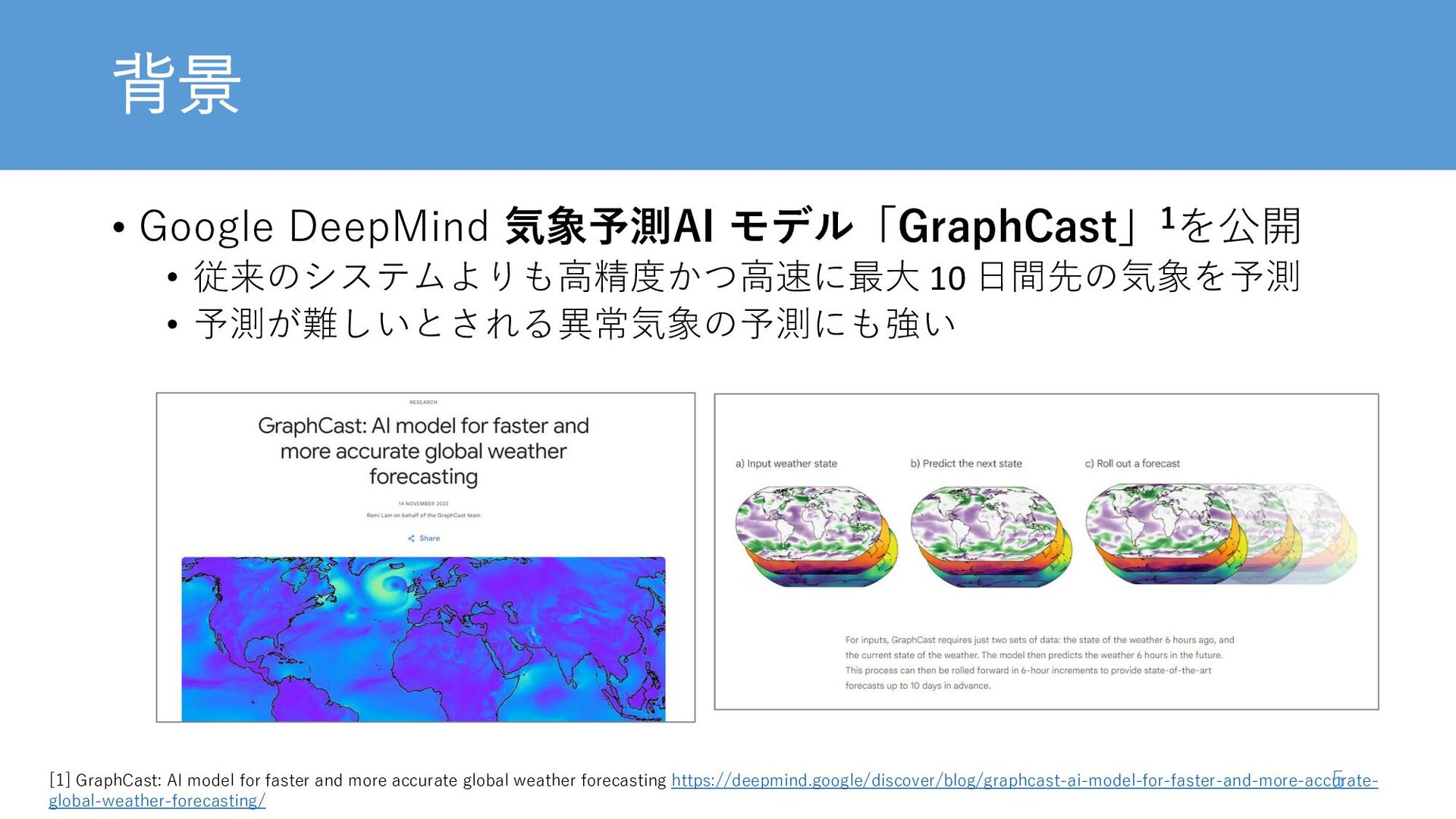
• 予測が難しいとされる異常気象の予測にも強い [1] GraphCast: AI model for faster and more accurate global weather forecasting https://deepmind.google/discover/blog/graphcast-ai-model-for-faster-and-more-accurate- global-weather-forecasting/ 5
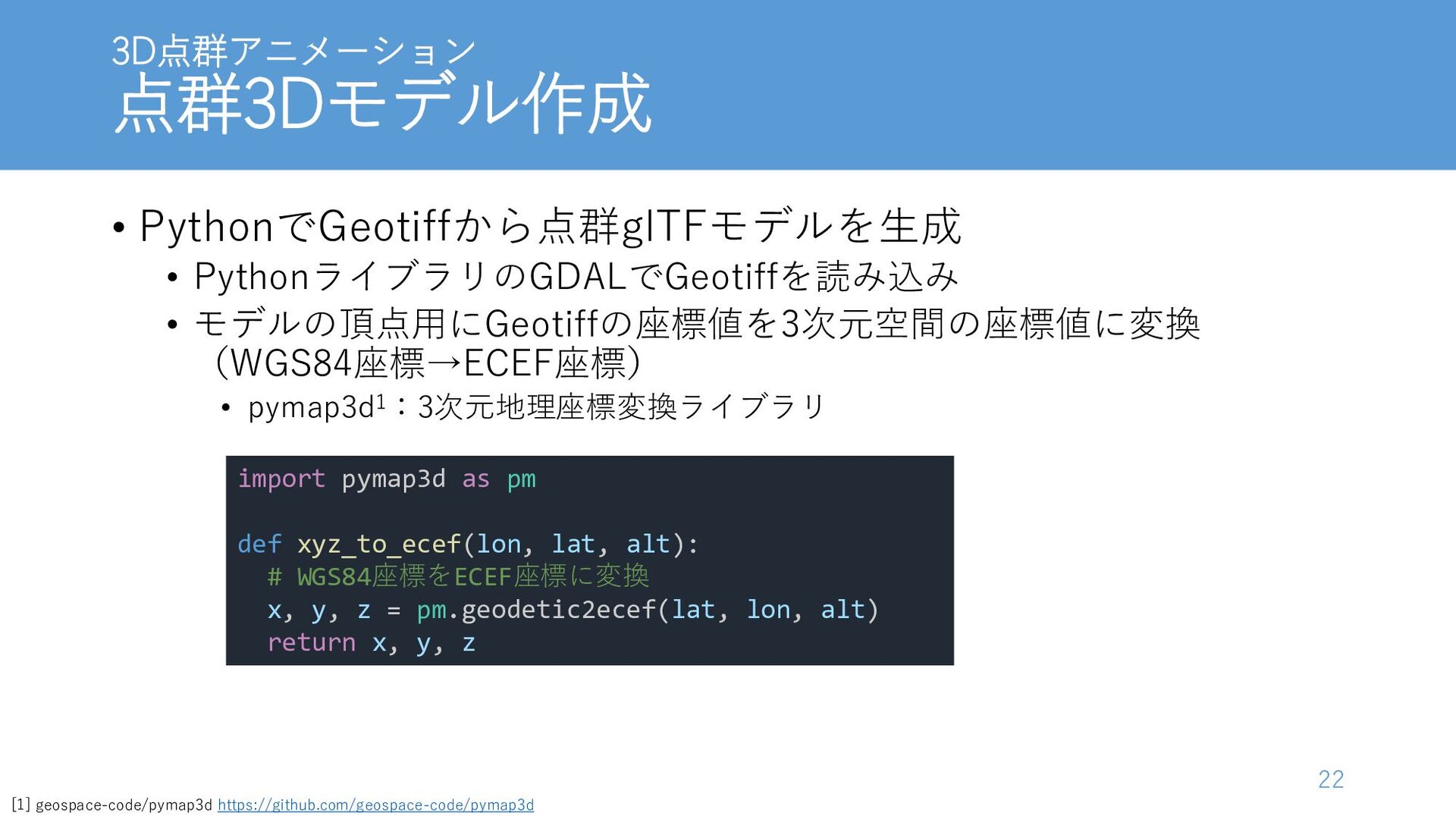
pymap3d1:3次元地理座標変換ライブラリ import pymap3d as pm def xyz_to_ecef(lon, lat, alt): # WGS84座標をECEF座標に変換 x, y, z = pm.geodetic2ecef(lat, lon, alt) return x, y, z 22 [1] geospace-code/pymap3d https://github.com/geospace-code/pymap3d
{kind=link}
![FOSS4G Advent Calendar • 今年もアドベントカレンダーの時期が近づいてきました! • 去年は弊社も参加させていただきました 2 [1] FOSS4G](https://files.speakerdeck.com/presentations/bf6e78a55e5d4ea28925a3285cac66f2/slide_1.jpg){kind=link}
{kind=link}
![背景 • 近年、異常気象による災害の被害が増加 早期に異常気象を発見するために 長期間を正確に気象予測する技術が重要 [1]気候変動監視レポート 2023 | 気象庁 https://www.data.jma.go.jp/cpdinfo/monitor/2023/pdf/ccmr2023_all.pdf](https://files.speakerdeck.com/presentations/bf6e78a55e5d4ea28925a3285cac66f2/slide_3.jpg){kind=link}
{kind=link}
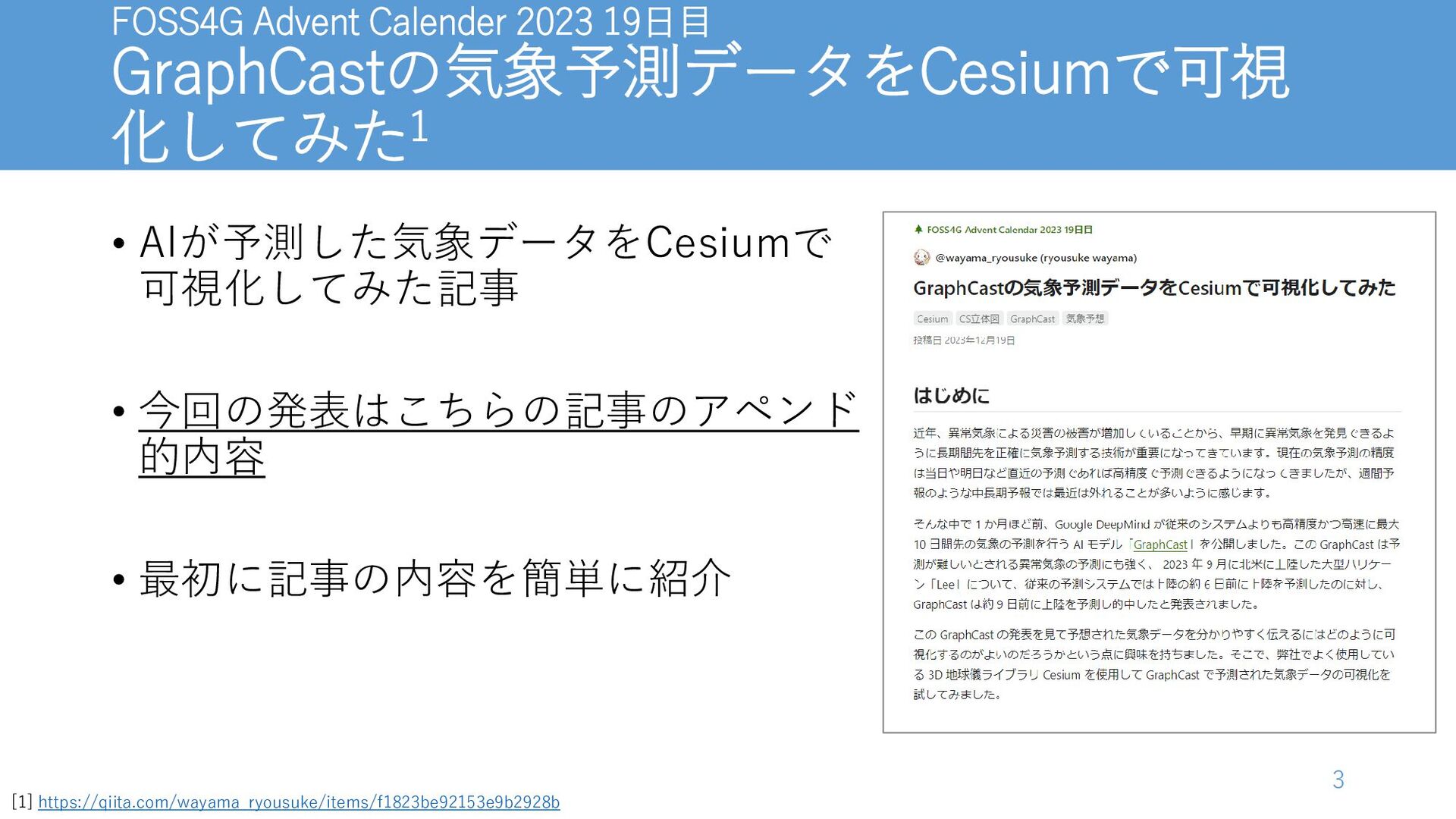
![背景 • 予測された気象データを分かりやすく伝えるにはどのように可 視化するのがよいのだろうか? GraphCastの発表を見て…… GraphCastで予測された気象データの 可視化を3D 地球儀ライブラリCesium1で試してみた 6 [1]](https://files.speakerdeck.com/presentations/bf6e78a55e5d4ea28925a3285cac66f2/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
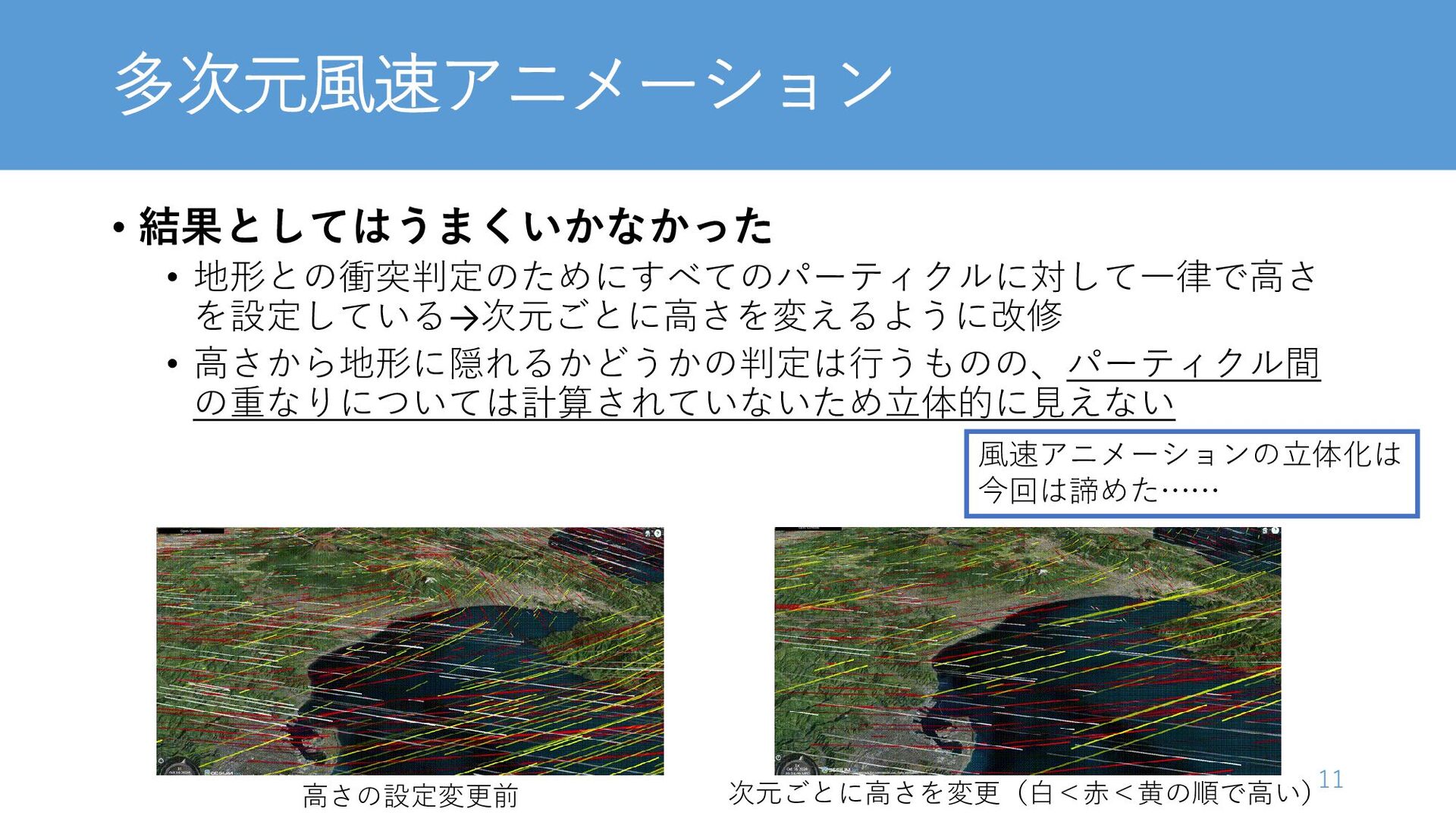
![多次元風速アニメーション • WebGL により風速をパーティクルアニメーションとして描画す ることで可視化する手法がある1 GraphCast で予測された風速データを表示してみた例 9 [1] GPU](https://files.speakerdeck.com/presentations/bf6e78a55e5d4ea28925a3285cac66f2/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
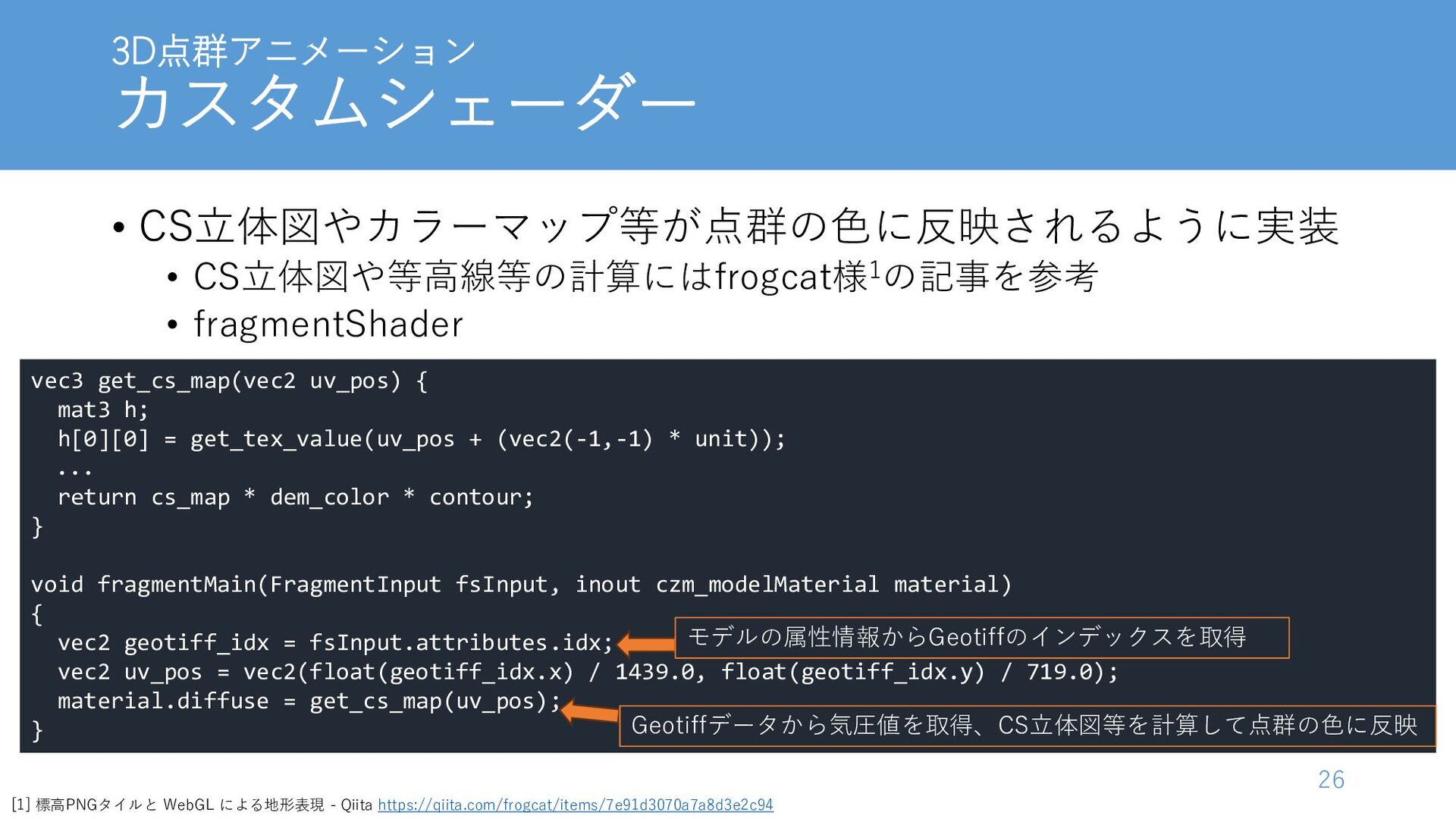
![3Dアニメーションの実装を模索 • Cesium公式のデモ1 • 点群の3Dモデルをカスタムシェーダーでアニメーション • 高速に滑らかに3Dモデルをアニメーションさせている 17 [1] Custom](https://files.speakerdeck.com/presentations/bf6e78a55e5d4ea28925a3285cac66f2/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}