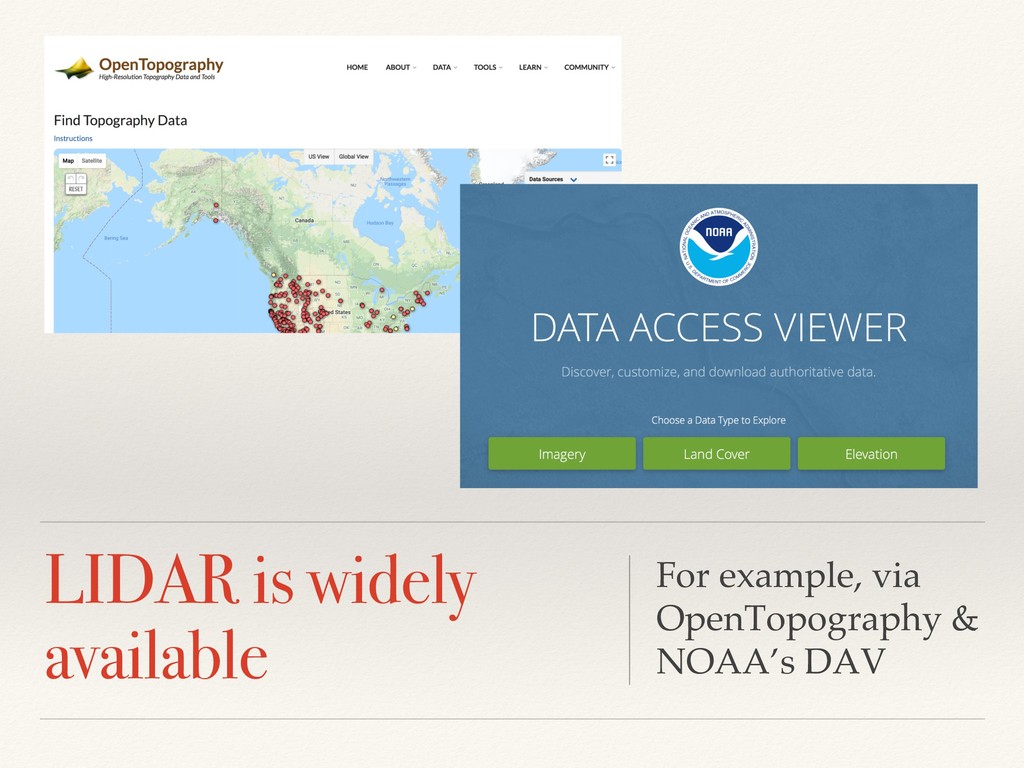
LIDAR, or “Light Detection And Ranging” is a technology which generates 3D point clouds by bouncing signal off objects. It can be deployed from satellite, airplane, drone or ground-mounted sensors, and generates hundreds of millions to billions of data points. Such datasets can overwhelm conventional visualization tools and databases. For example, Florida has comprehensively mapped its coastal zones with aerial LIDAR, an open dataset of several billion points. These are managed as thousands of arbitrarily-tiled files, and must often be heavily pre-processed even to open in GIS.
The advent of open source GPU databases such as MapD allows us to visualize LIDAR data directly and completely, as well as speeding the process of generating useful derivatives. We demonstrate a use case for Florida’s Department of Environmental Protection (DEP). The DEP is currently working on a conservation plan for 16 endangered species, whose habitat extends across more than 400 miles of Florida’s beaches. They need to know not only where built structures exist on or near beaches, but also their ground and roof elevations. This is important in assessing vulnerability to sea level rise, as well as potential light pollution impacts on sea turtles. We demonstrate here how LIDAR data can be combined with parcel geographies, to estimate key 3d building characteristics at scale. This technique is not limited to coastal areas, but could prove valuable anywhere where such datasets are available.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}