. Basta garantir as quatro propriedades relacionadas pelo Galileu. Já conferimos que o conjunto ℳ× das matrizes × com a adição de matrizes e a multiplicação por fator de escala é um espaço vetorial.
→ , de um espaço vetorial em um espaço vetorial é, ele mesmo, um espaço vetorial. Isto é óbvio, visto que aplicações lineares são um tipo particular de funções.
, ∈ ℱ , ℝ os valores de () e () são números reais, logo + () ∈ ℝ e também, para ∈ ℝ temos ∙ () ∈ ℝ. Então tudo está bem definido (podemos fazer as contas). Pois é, se , ∈ ℒ(, ), definimos + vetor a vetor (ou, ponto a ponto): + = + , ∀ ∈ , visto que , ∈ e podemos somar vetores de . Assim a soma + está bem definida.
um escalar ∈ ℝ. Sim filho, se ∈ ℒ(, ) e ∈ ℝ definimos ∙ número a vetor (ou, ponto a ponto): ∙ = ∙ (), ∀ ∈ ℝ , ∀ ∈ , visto que é um vetor de e podemos multiplicá-lo por um escalar . Assim o produto α ∙ está bem definido.
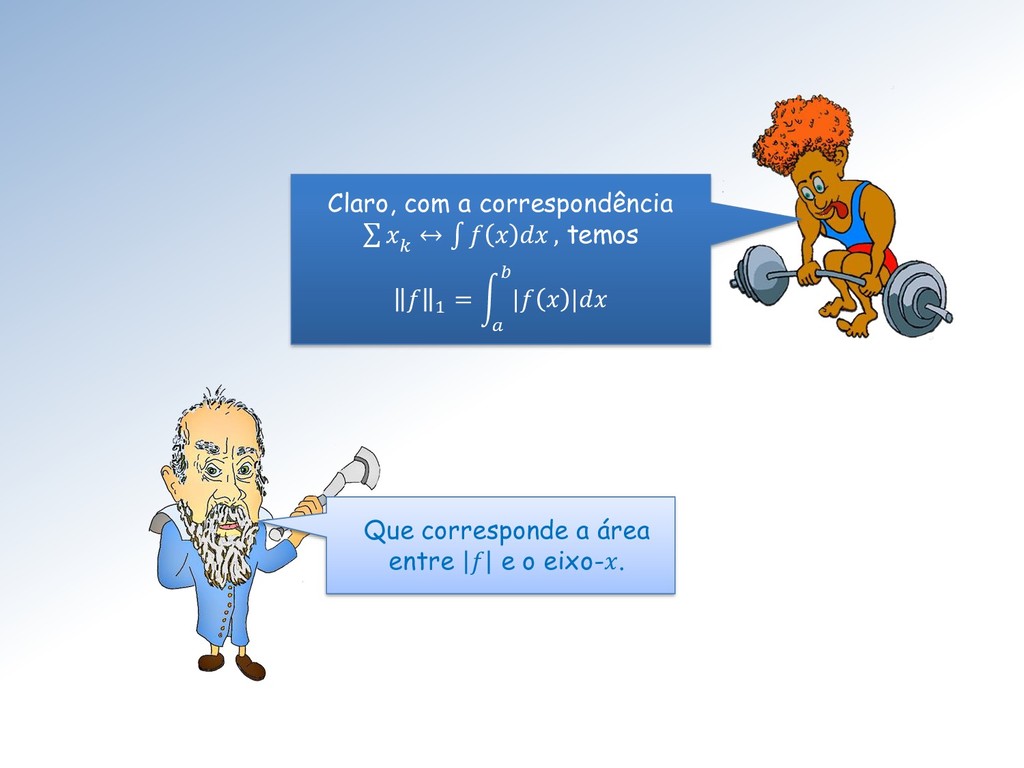
ℝ. ℒ(, ℝ) é denominado espaço dos funcionais lineares ℓ: → ℝ e anotado ′. Um exemplo clássico de funcional linear é a integral definida: ℐ = න . Um outro é derivada: .
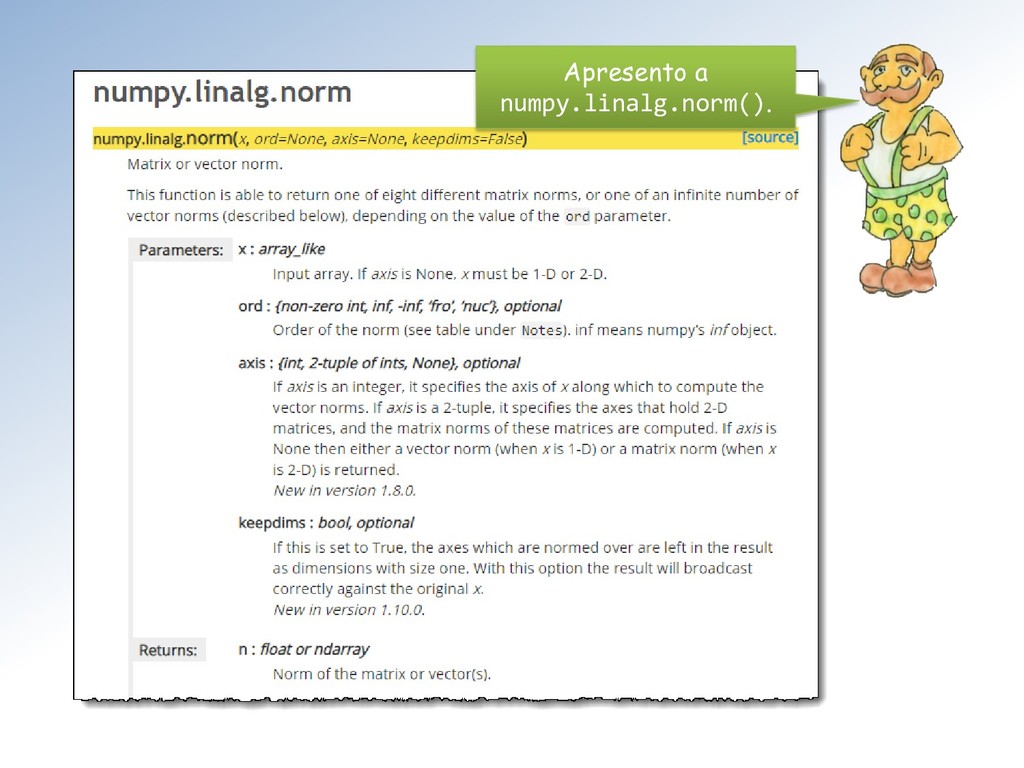
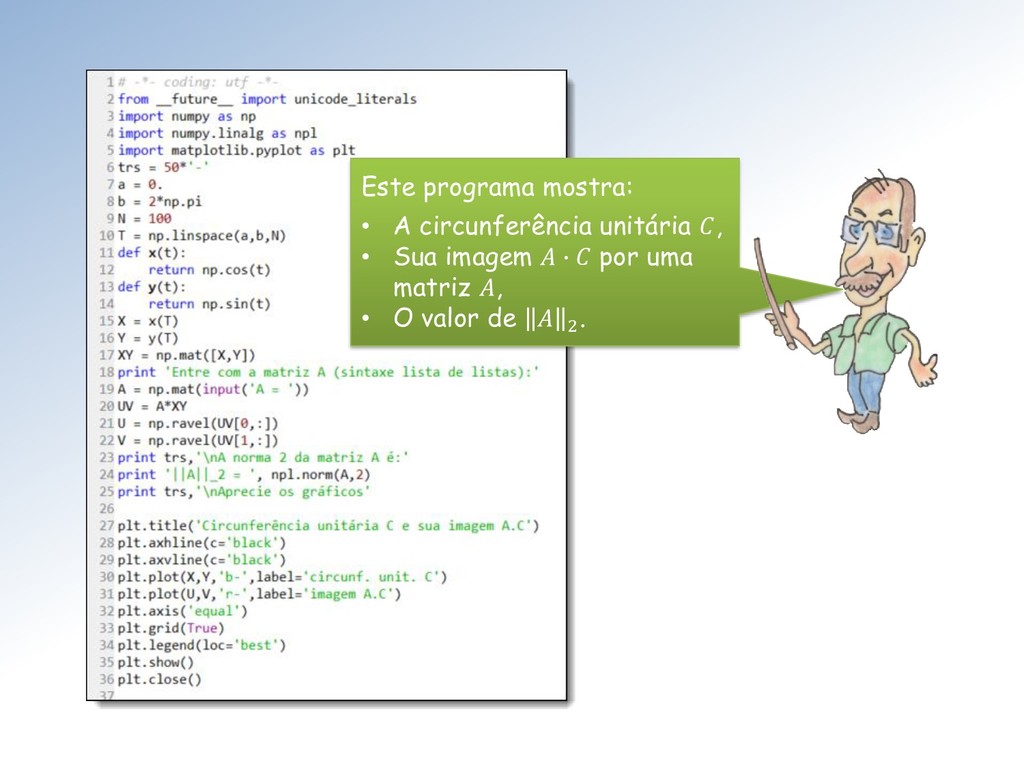
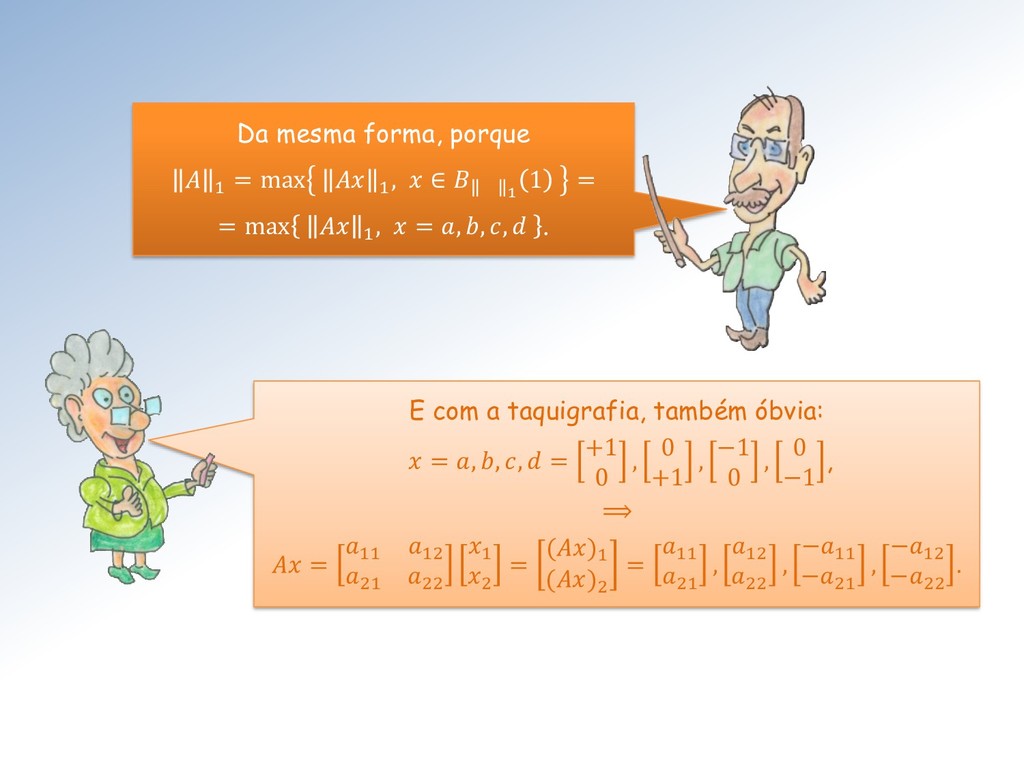
uma norma em ℝ, então a função × : ℳ× → ℝ definida por ⟼ × = sup ≠0 é uma norma em ℳ× . É uma norma matricial denominada norma matricial induzida (pelas normas em ℝ e ℝ).
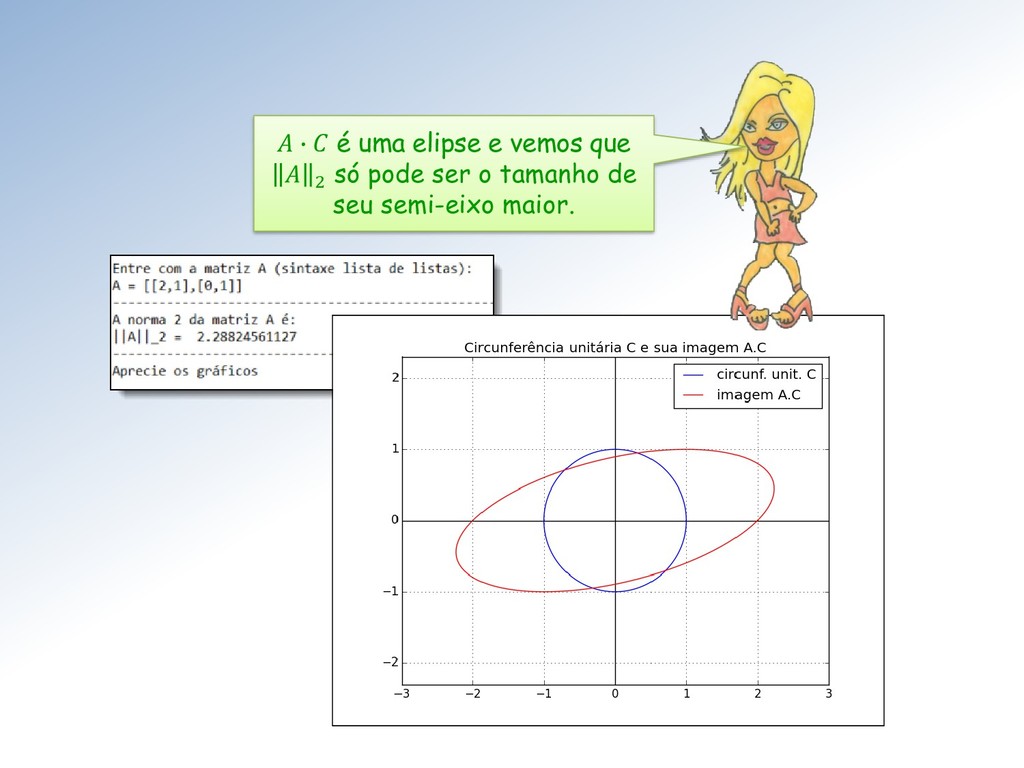
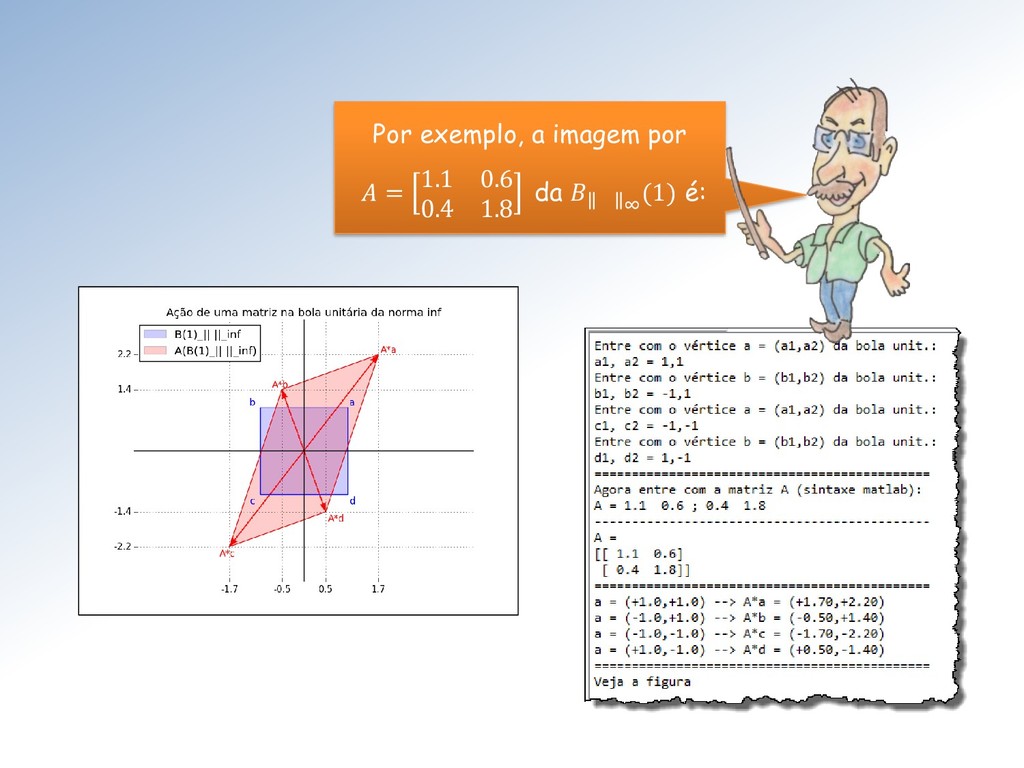
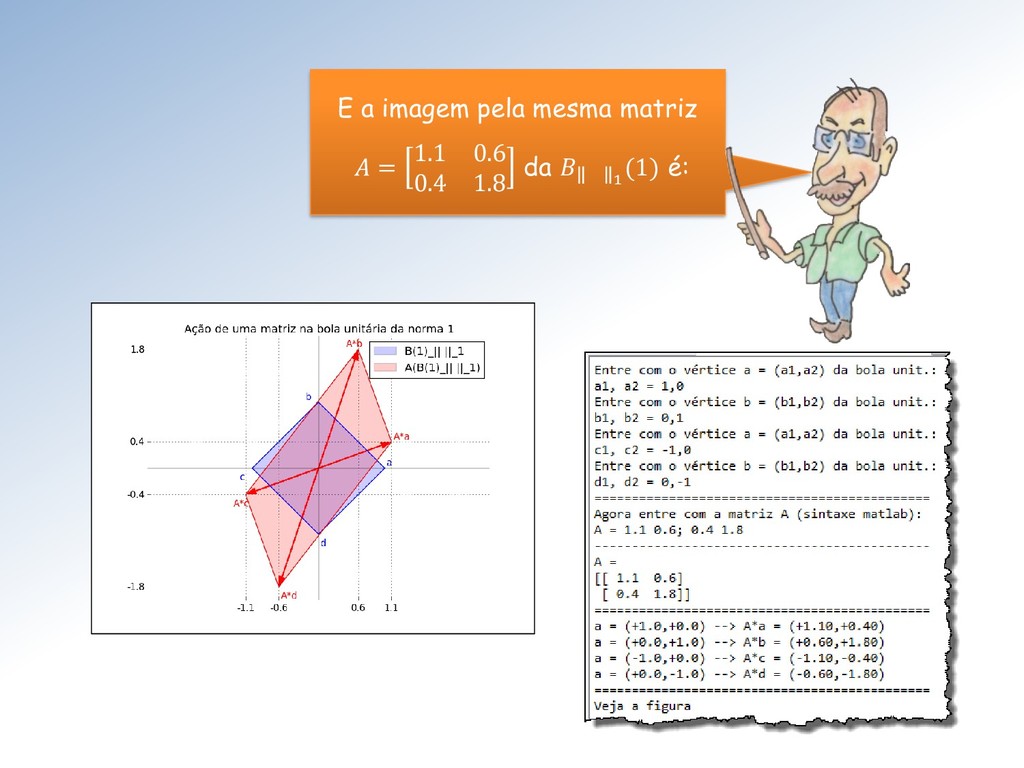
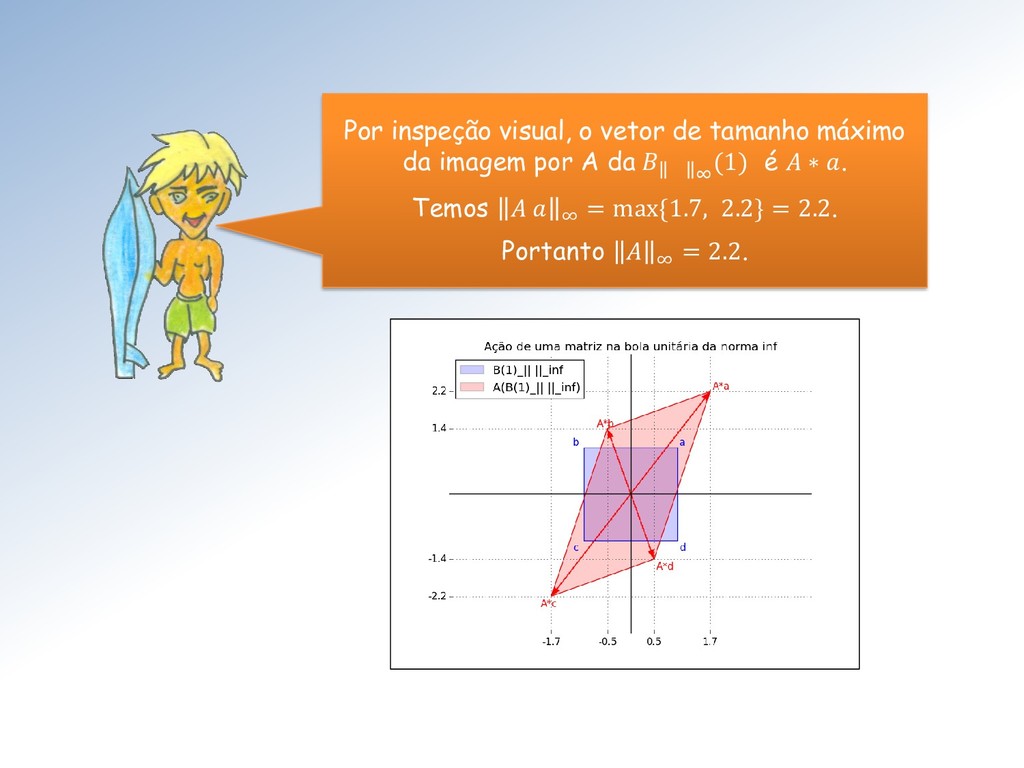
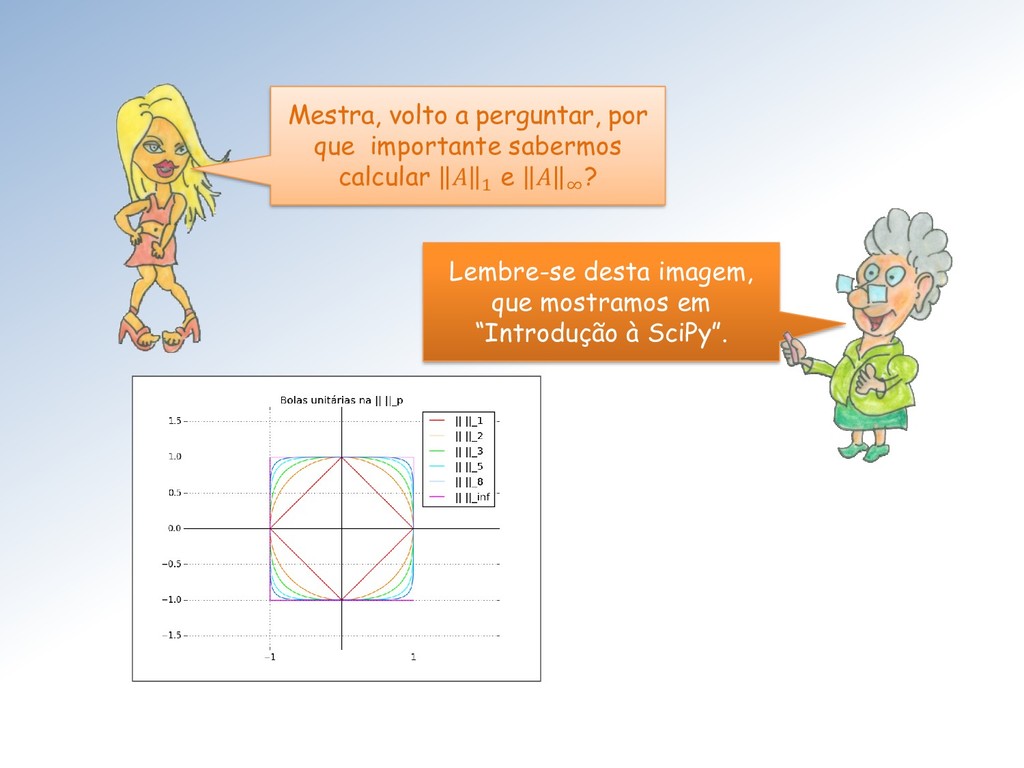
=1 Portanto é o maior dos valores quando = 1, isto é, quando percorre a circunferência unitária. Aliás, como será a imagem ∙ da circunferência unitária ?
= 1. Portanto isto também vale para o supremo: + = sup =1 + ≤ + . Brilhante Cabelos de Fogo! Assim é válida a exigência IV, a desigualdade triangular: + ≤ + , ∀, ∈ ℳ× .
Veremos mais adiante que a 2 de uma matriz é o seu maior valor singular 1 . E que o cálculo de valores singulares é difícil e trabalhoso. Assim, precisaremos contornar esse problema.
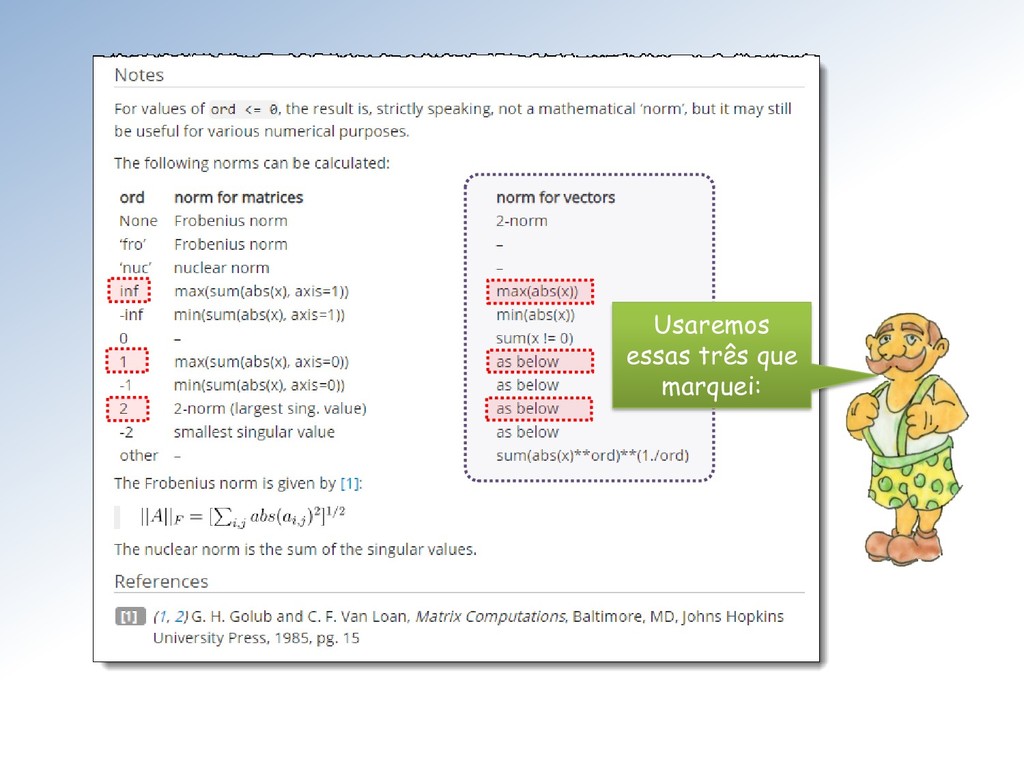
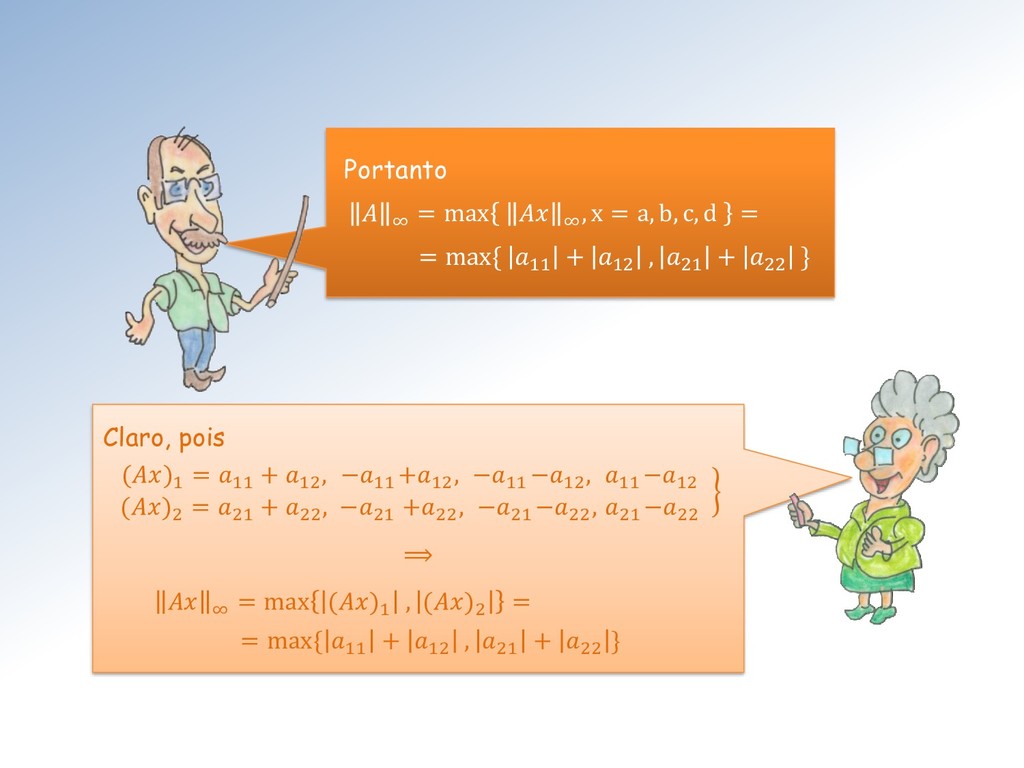
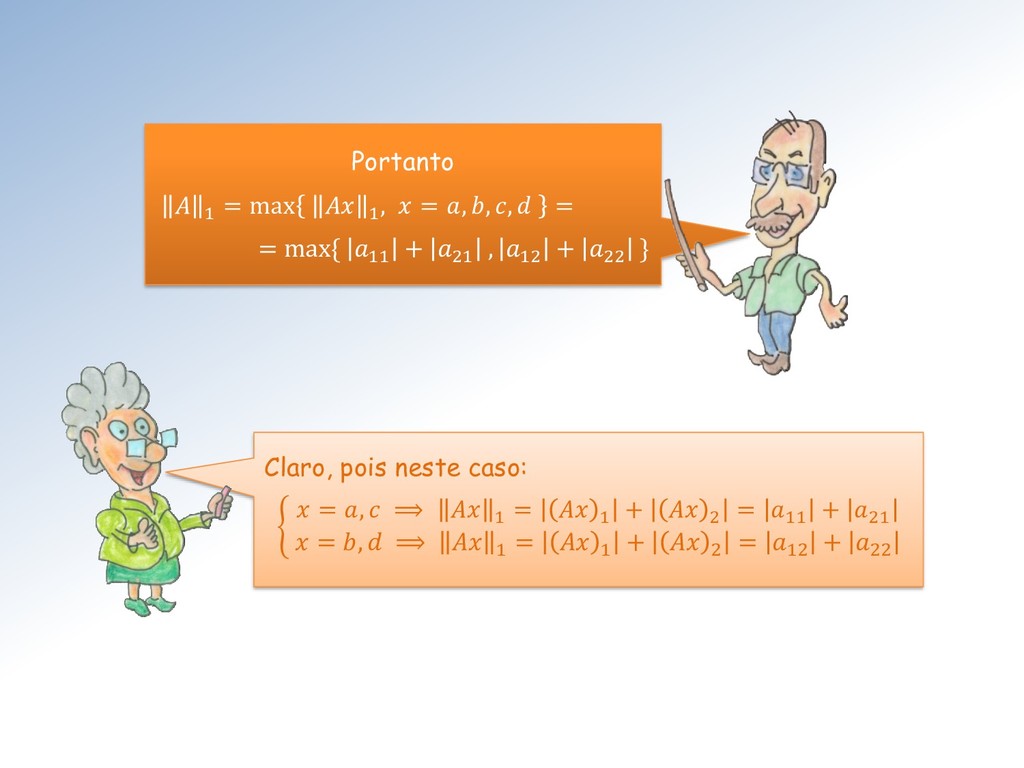
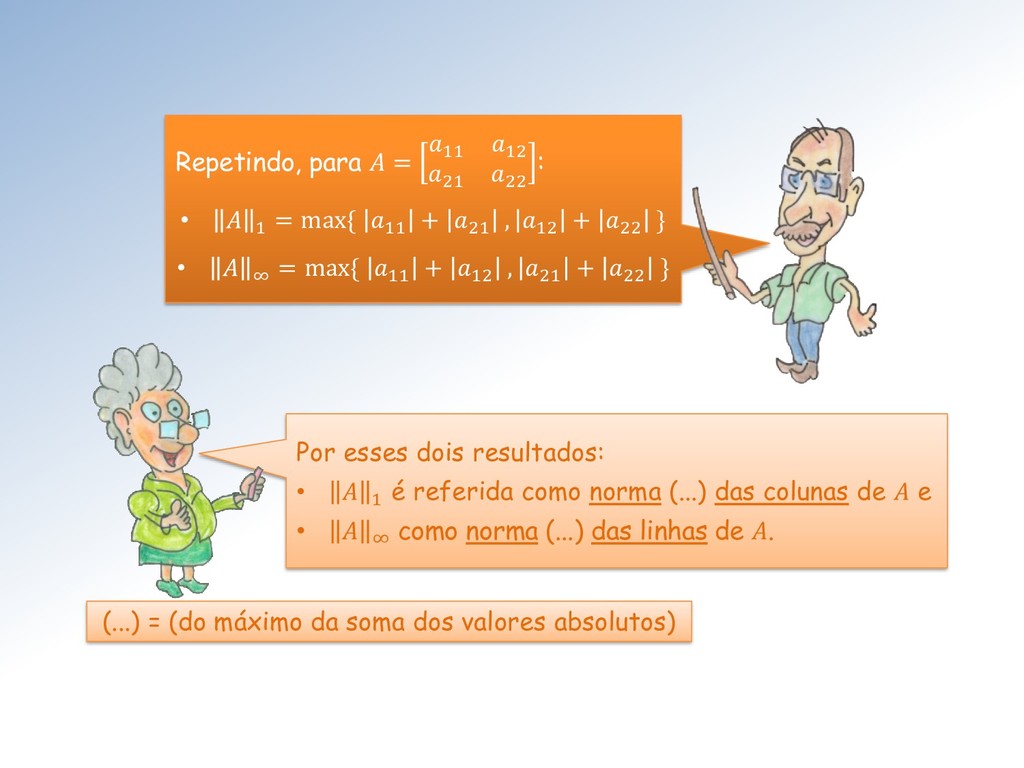
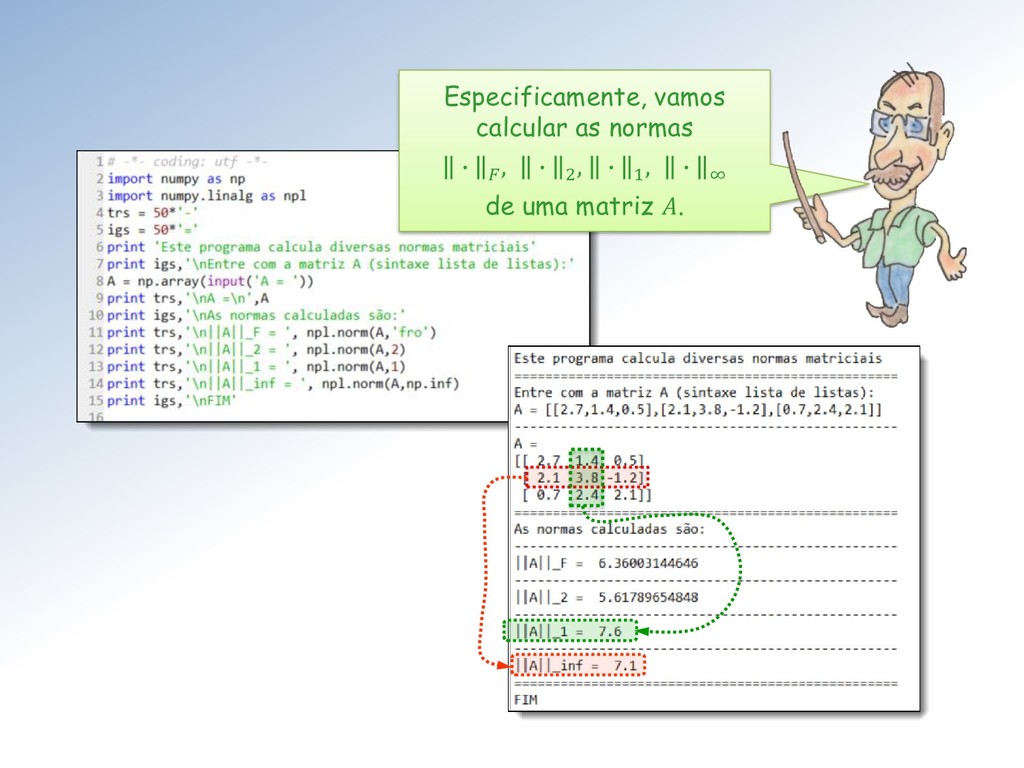
= max{ 11 + 21 , 12 + 22 } • ∞ = max{ 11 + 12 , 21 + 22 } Por esses dois resultados: • 1 é referida como norma (...) das colunas de e • ∞ como norma (...) das linhas de . (...) = (do máximo da soma dos valores absolutos)
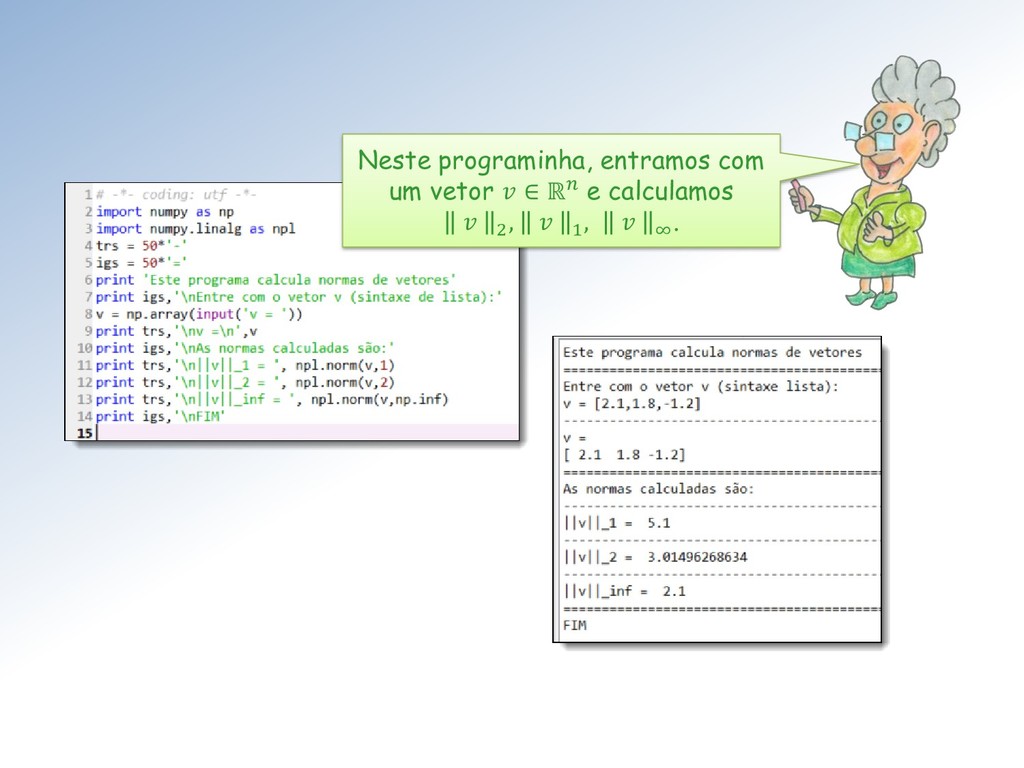
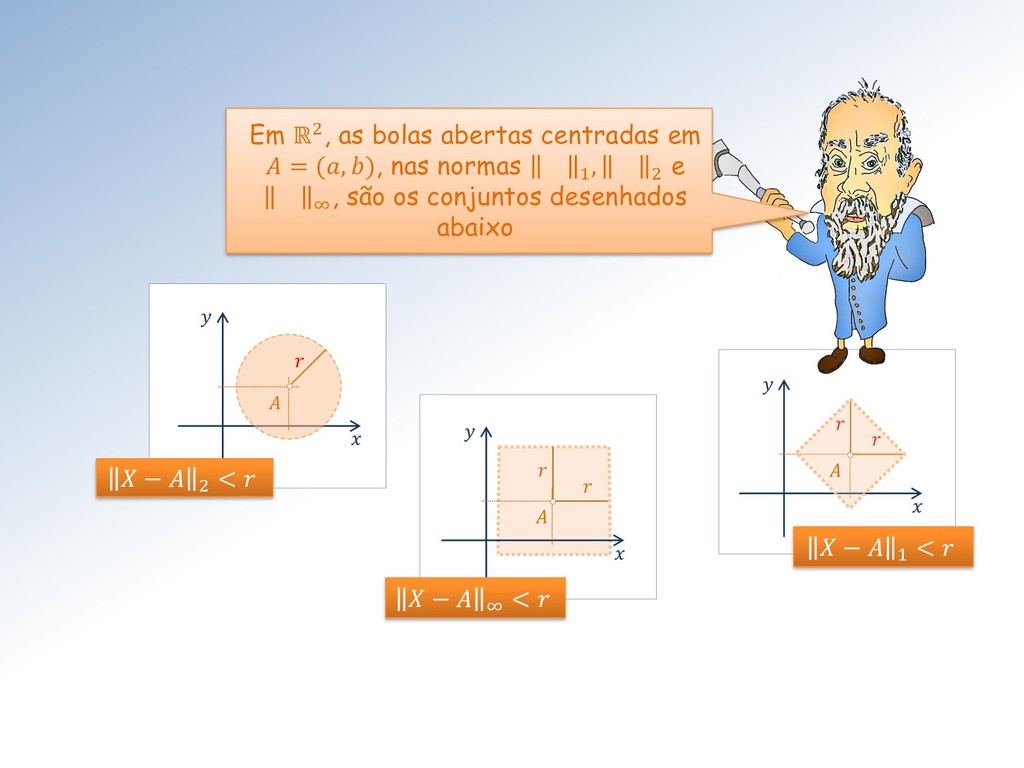
vetores flechinha e de matrizes. Inclusive aprendemos a calculá-las usando a NumPy. Já vimos que nos espaços ℝ, ℂ e para as matrizes ℳ× existem diversas normas: 1 , 2 , , ∞ .
de uma função : [, ] → ℝ ? Como você mesma já disse, nos ℝ, ℂ e em ℳ× existem diversas formas de medir o tamanho de uma vetor. O mesmo se dará para funções!
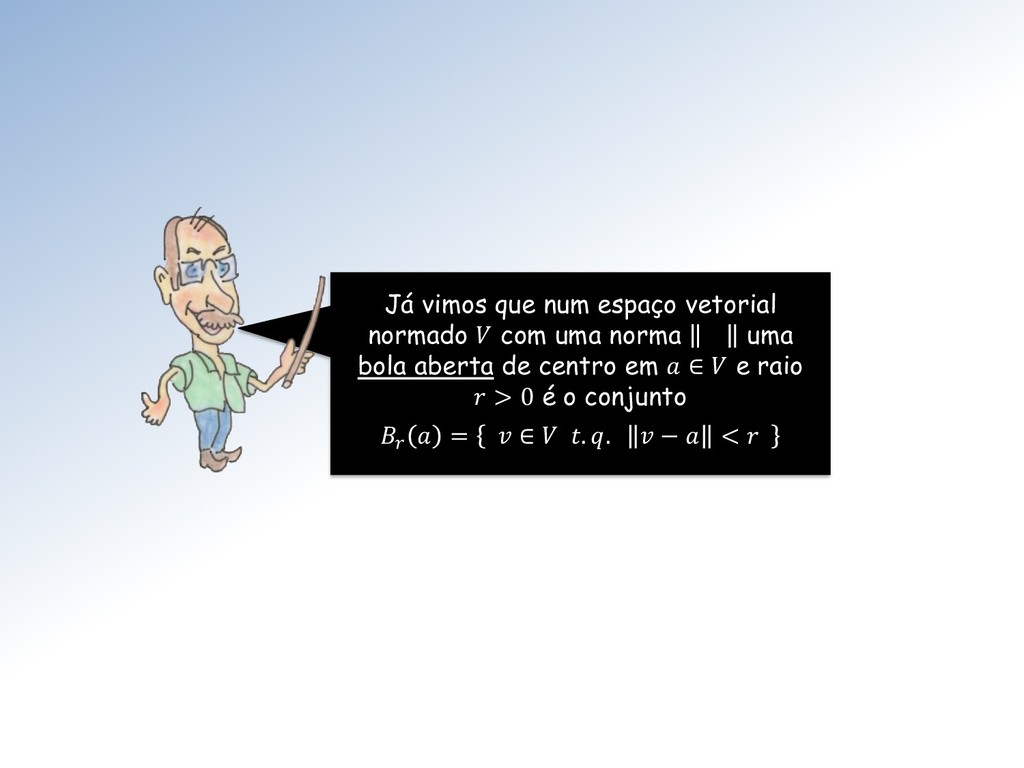
num conjunto quando existe algum número > 0 tal que () < , ∀ ∈ . É o caráter dual atacando mais uma vez! O subconjunto ℬ , ℝ de ℱ , ℝ constituído pelas funções limitadas é um subespaço vetorial de ℱ , ℝ .
vetorial pois: • A soma de funções limitadas é uma função limitada; • O produto de uma função limitada por qualquer número real resulta numa função limitada.
norma no conjunto ℬ(, ℝ) das funções limitadas num conjunto . Assim ℬ(, ℝ) é um espaço vetorial normado. As propriedades I, II , III e IV da definição abstrata de norma são facílimas de provar. Faça isto como exercício, Surfista!
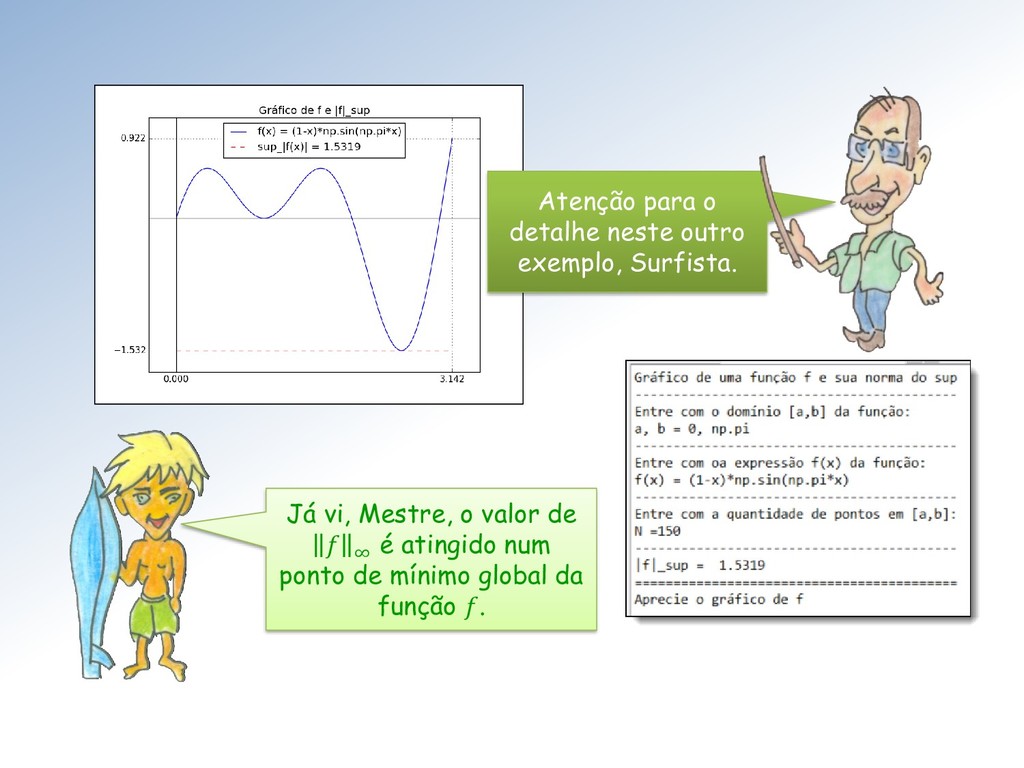
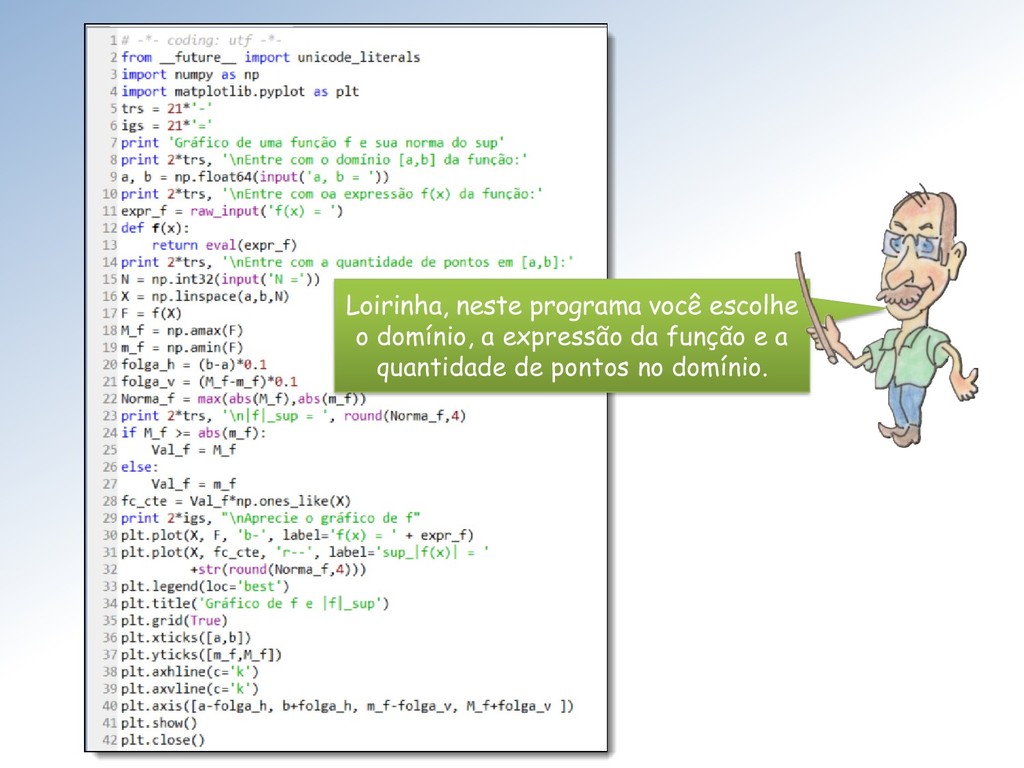
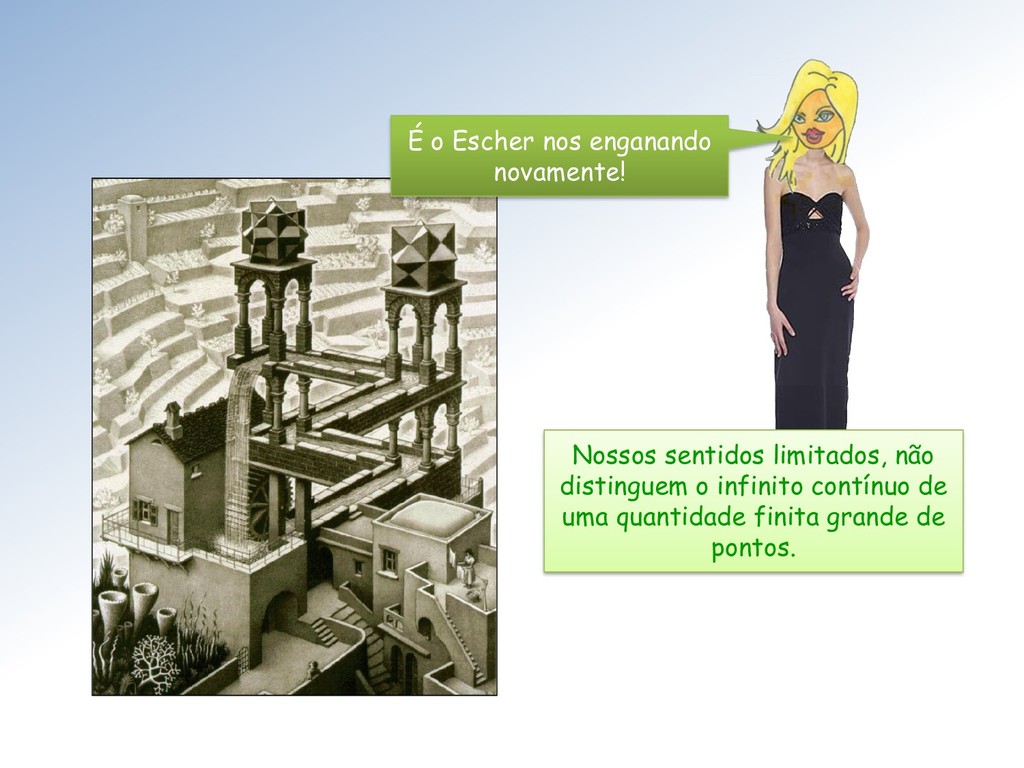
ℝ. Entretanto, confiram que na 1ª função usamos 100 pontos em [, ] e na 2ª usamos 150 pontos Quantidades finitas de pontos substituindo uma infinidade contínua de pontos! Existe uma ilusão nesse programa:
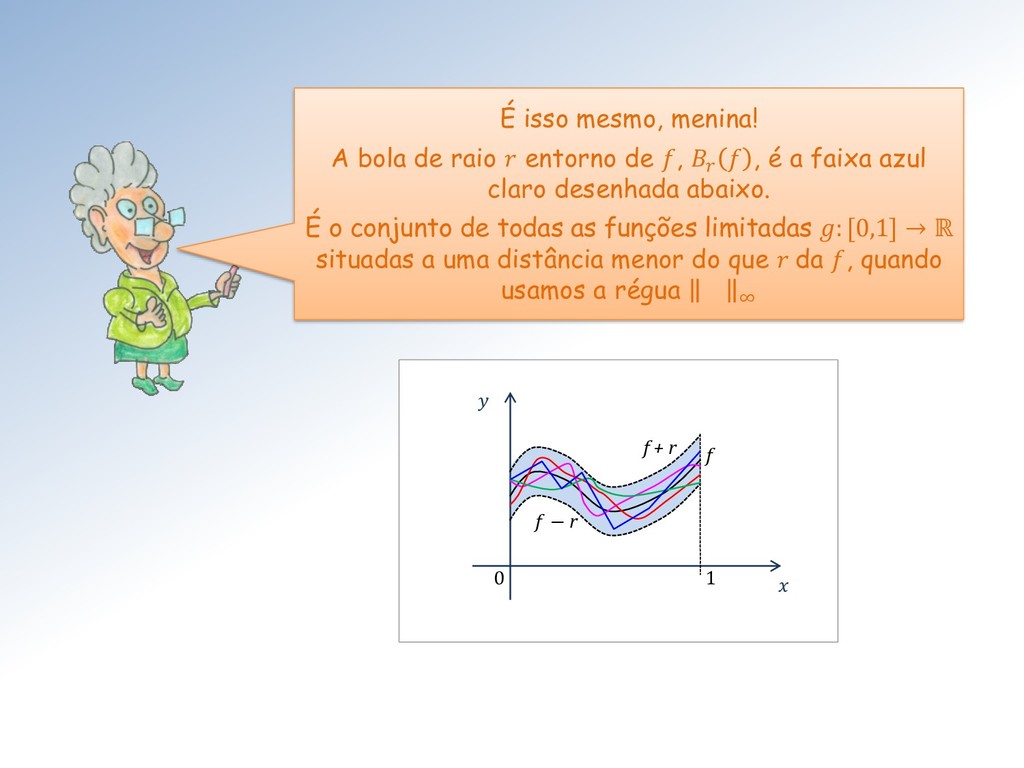
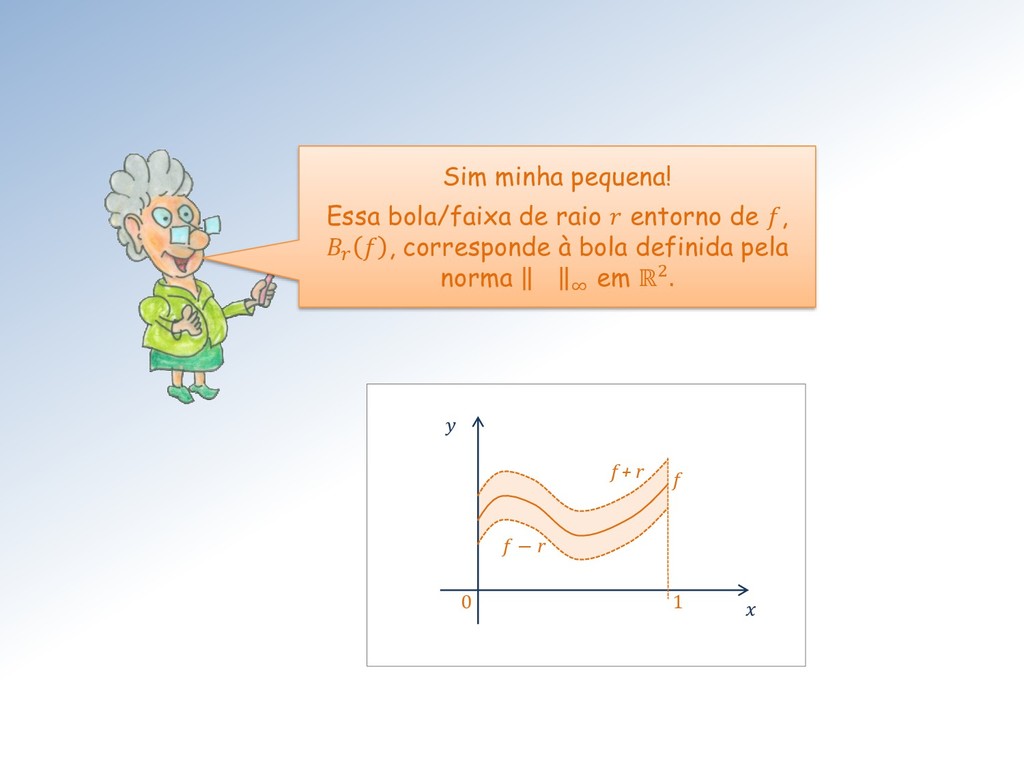
o ponto (, ) no plano cartesiano ℝ × ℝ. Então qualquer valor = () assumido pela em obrigatoriamente terá que satisfazer − () < . Que é um intervalo de raio centrado nesse ponto sobre a reta vertical por . Confira no meu desenho
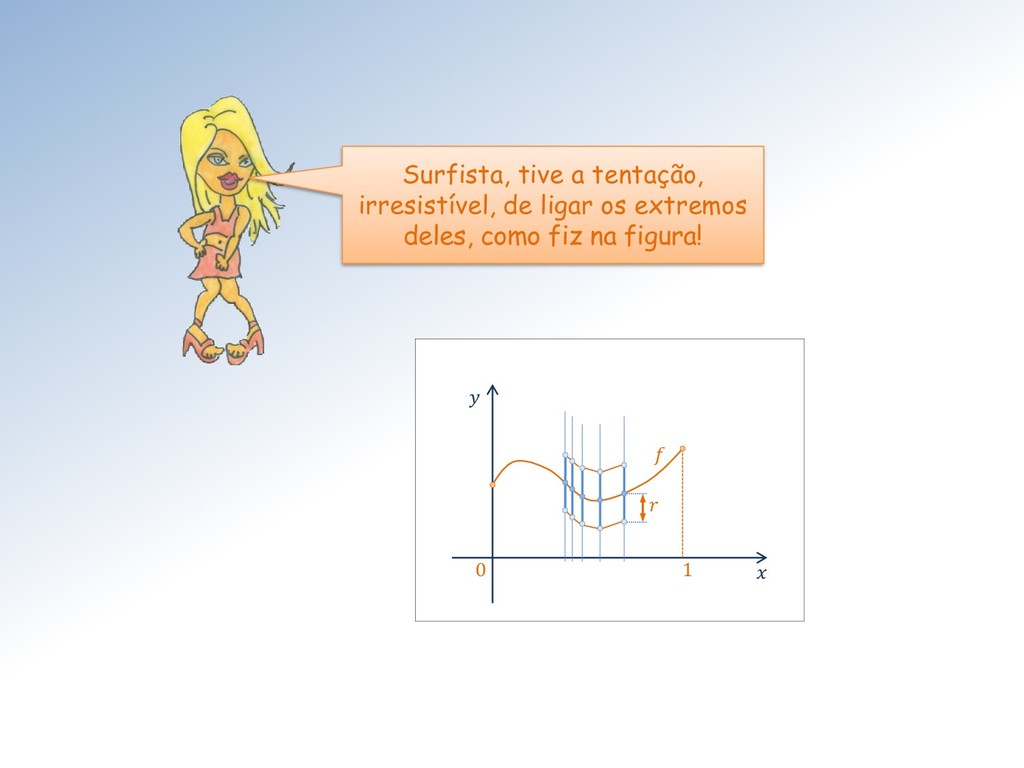
, , é a faixa azul claro desenhada abaixo. É o conjunto de todas as funções limitadas : [0,1] → ℝ situadas a uma distância menor do que da , quando usamos a régua ∞ 1 0 + r − r
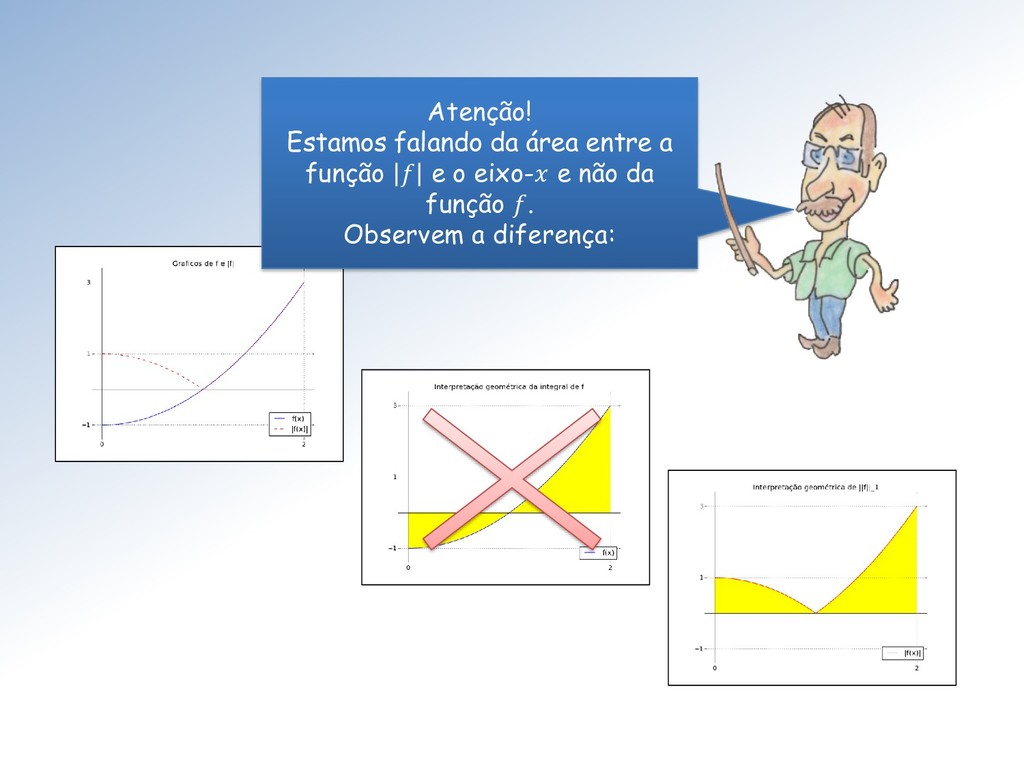
centro em uma função ∶ [, ] → ℝ e raio é o conjunto de todas as funções integráveis ∶ [, ] → ℝ tais que න − () < É uma imposição sobre o tamanho da área entre a função ℎ = − e o eixo-. Se fosse a função nula estaríamos falando do conjunto de todas as funções integráveis tais que න () < .
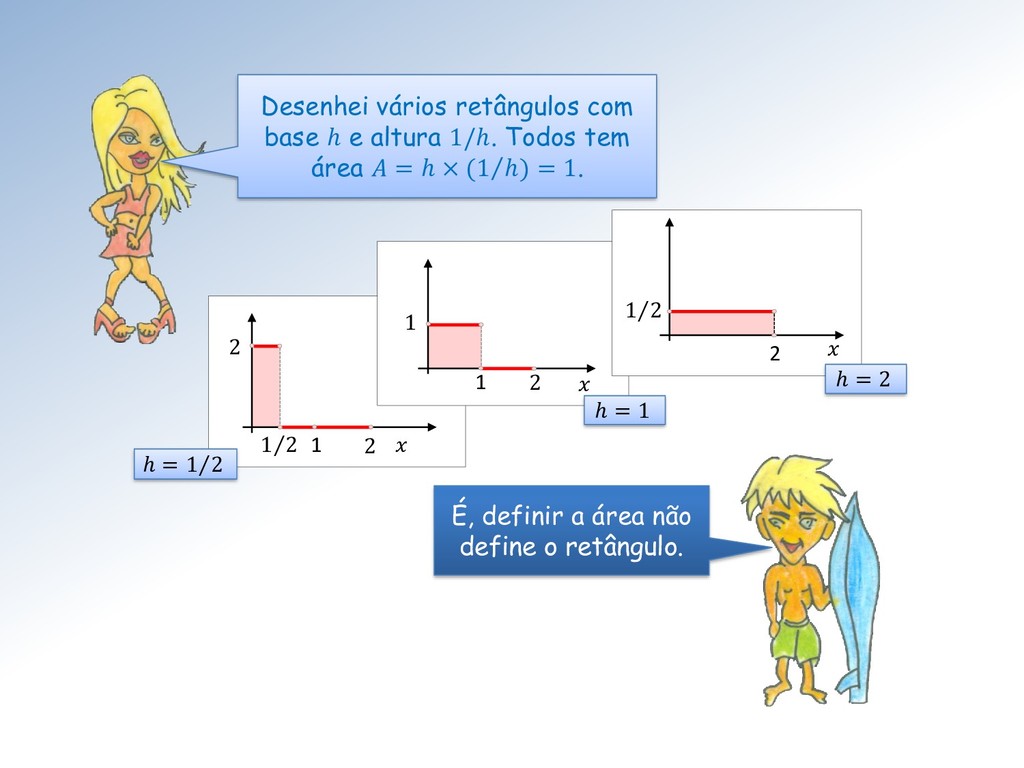
condição sobre a área não impõe restrições sobre a forma (o gráfico) das funções : [, ] → ℝ. Sim, pensem por exemplo, nas funções ℎ : [0, 2] → ℝ definidas por ℎ = ቊ 1/ℎ 0 < ≤ ℎ 0 ℎ < ≤ 2 , para 0 < ℎ < 2. Para todas elas, ℎ 1 = න 0 2 ℎ = 1 .
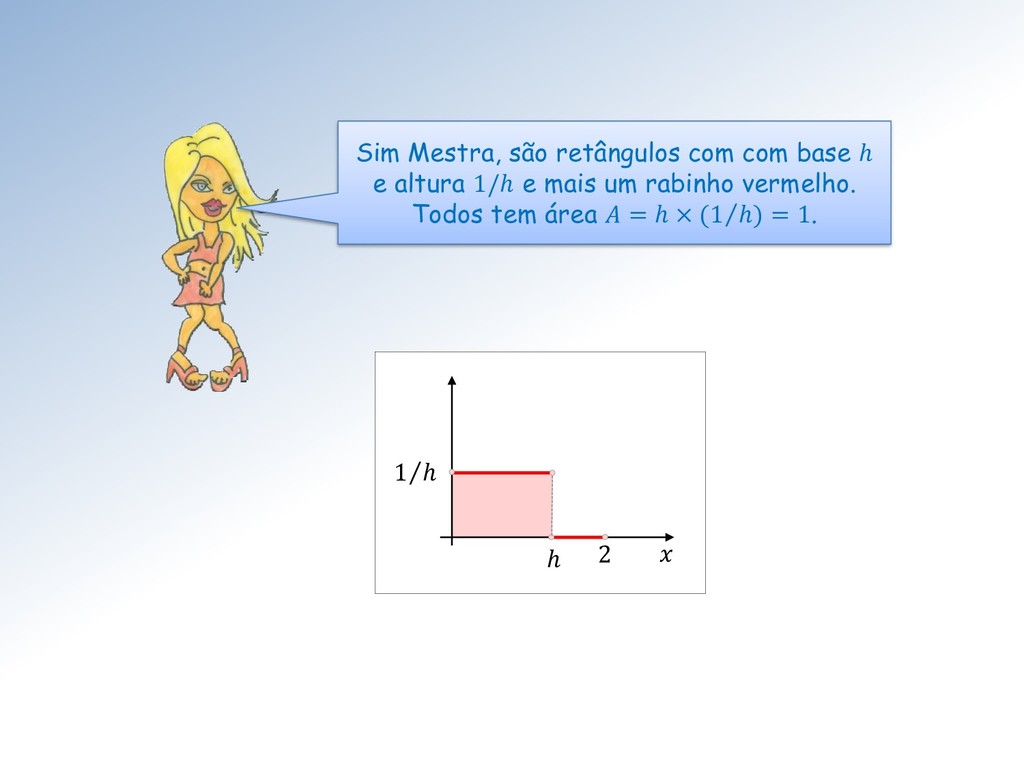
1 1 1 ℎ = 1 2 Desenhei vários retângulos com base ℎ e altura 1/ℎ. Todos tem área = ℎ × Τ (1 ℎ) = 1. 2 ℎ = 2 Τ 1 2 É, definir a área não define o retângulo.
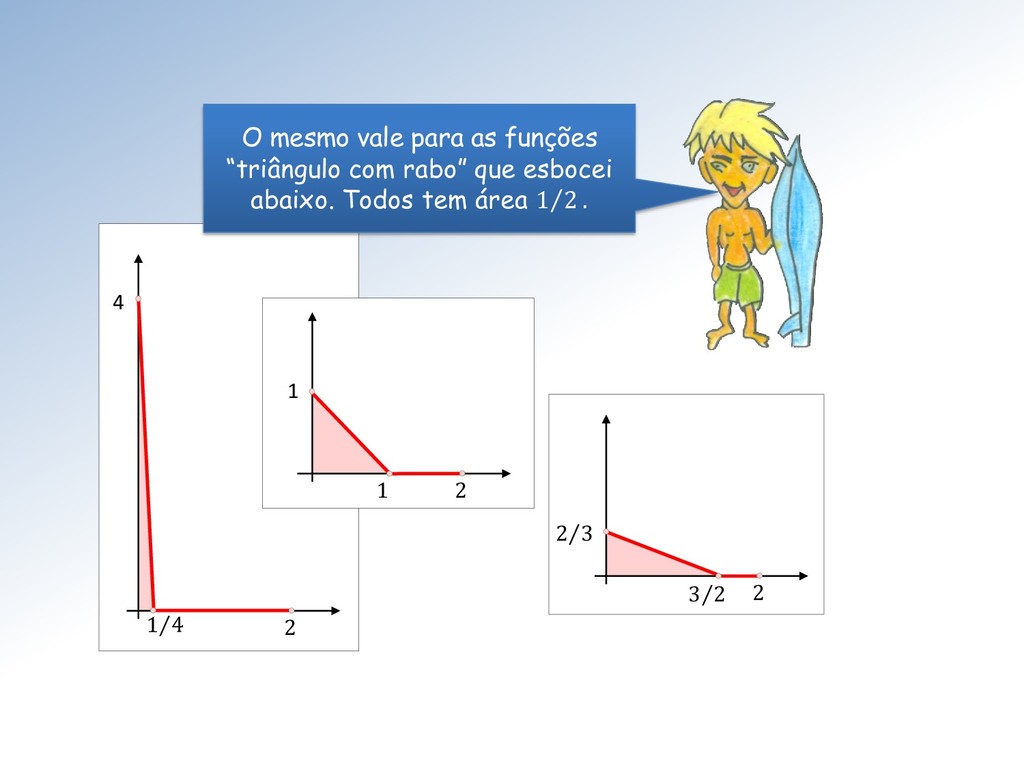
com o gráfico como as abaixo também estaria nessa bola de raio 1, desde que | | ≤ 1. Todas essas funções elas estariam numa bola de raio = 1 centrada na função nula.
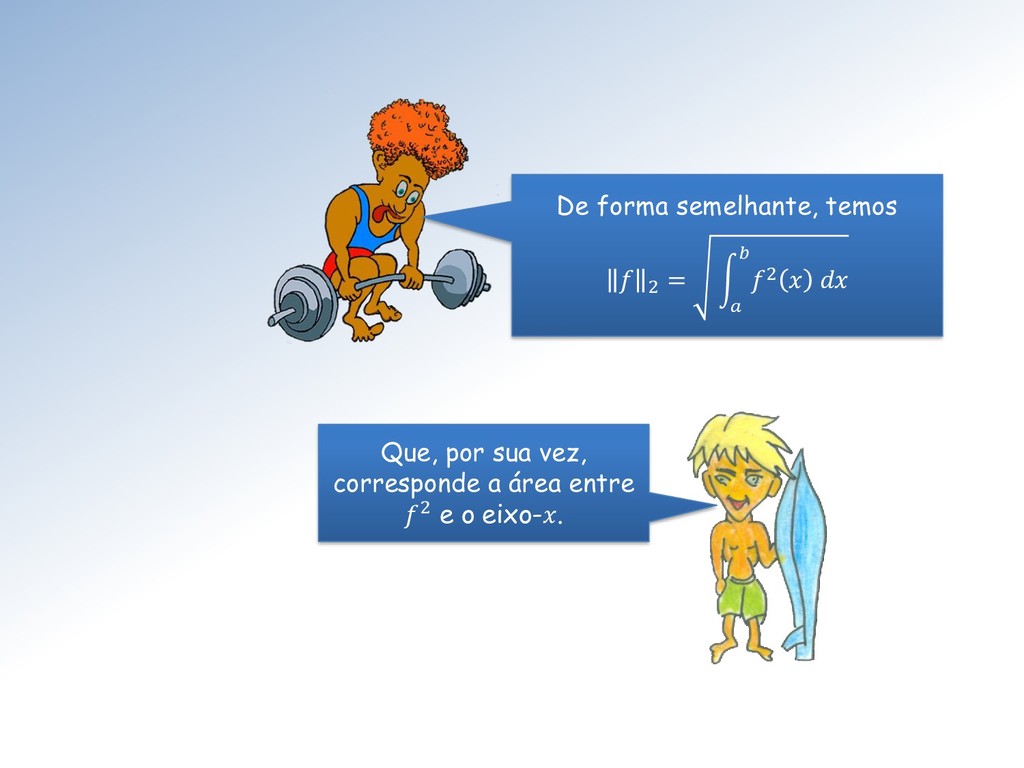
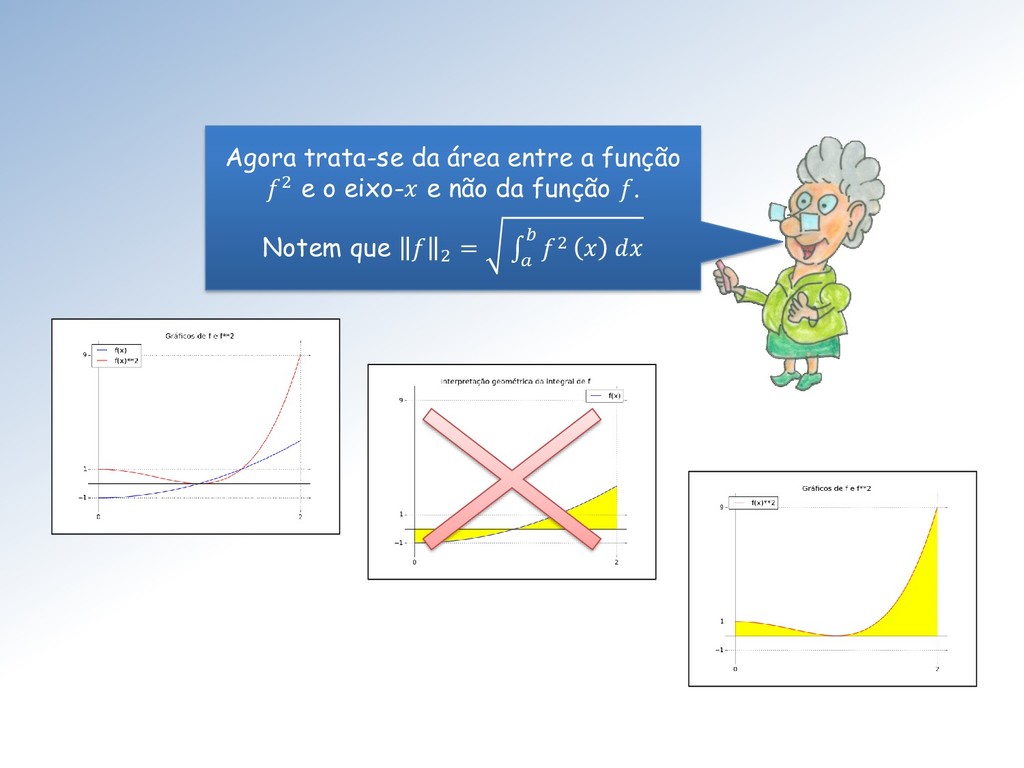
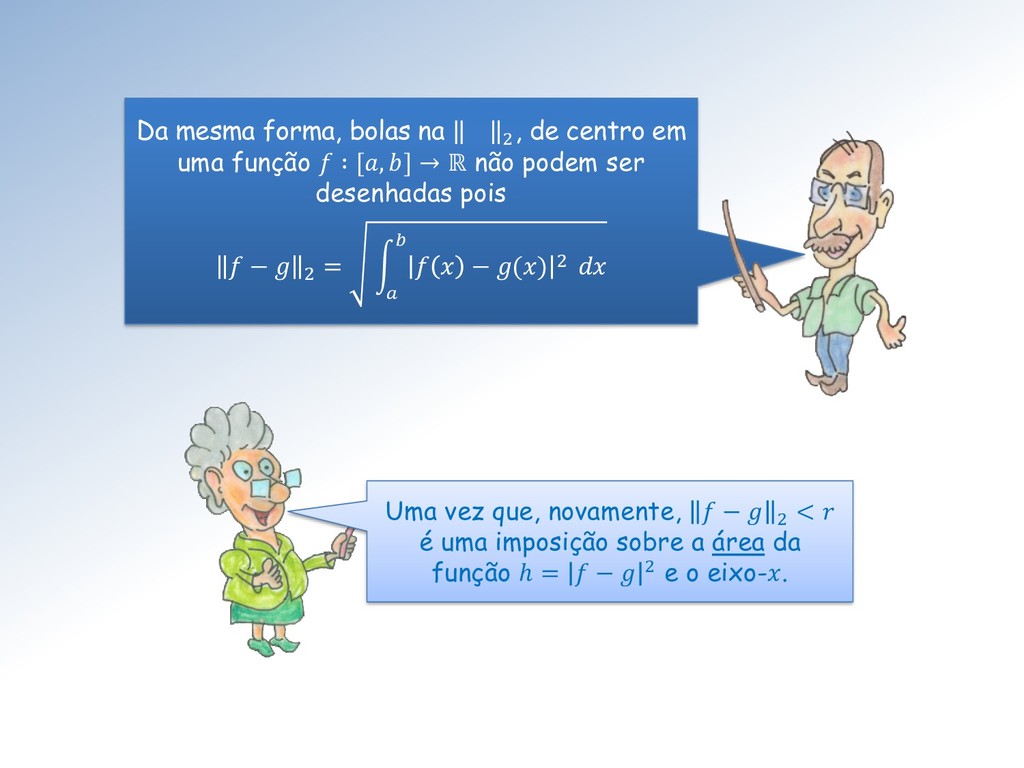
uma função ∶ [, ] → ℝ não podem ser desenhadas pois − 2 = න − () 2 Uma vez que, novamente, − 2 < é uma imposição sobre a área da função ℎ = − 2 e o eixo-.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Os domínios das duas funções são intervalos [, ] ⊂](https://files.speakerdeck.com/presentations/a468236344b3439bb95bedba9d87fb9a/slide_60.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![() Loirinha, fixe um valor de ∈ [0,1] e marque](https://files.speakerdeck.com/presentations/a468236344b3439bb95bedba9d87fb9a/slide_66.jpg){kind=link}
![Escolhi alguns valores de ∈ [0,1] e desenhei os intervalos](https://files.speakerdeck.com/presentations/a468236344b3439bb95bedba9d87fb9a/slide_67.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Sim. Além dessas, qualquer função : [, ] → ℝ](https://files.speakerdeck.com/presentations/a468236344b3439bb95bedba9d87fb9a/slide_83.jpg){kind=link}
{kind=link}
{kind=link}