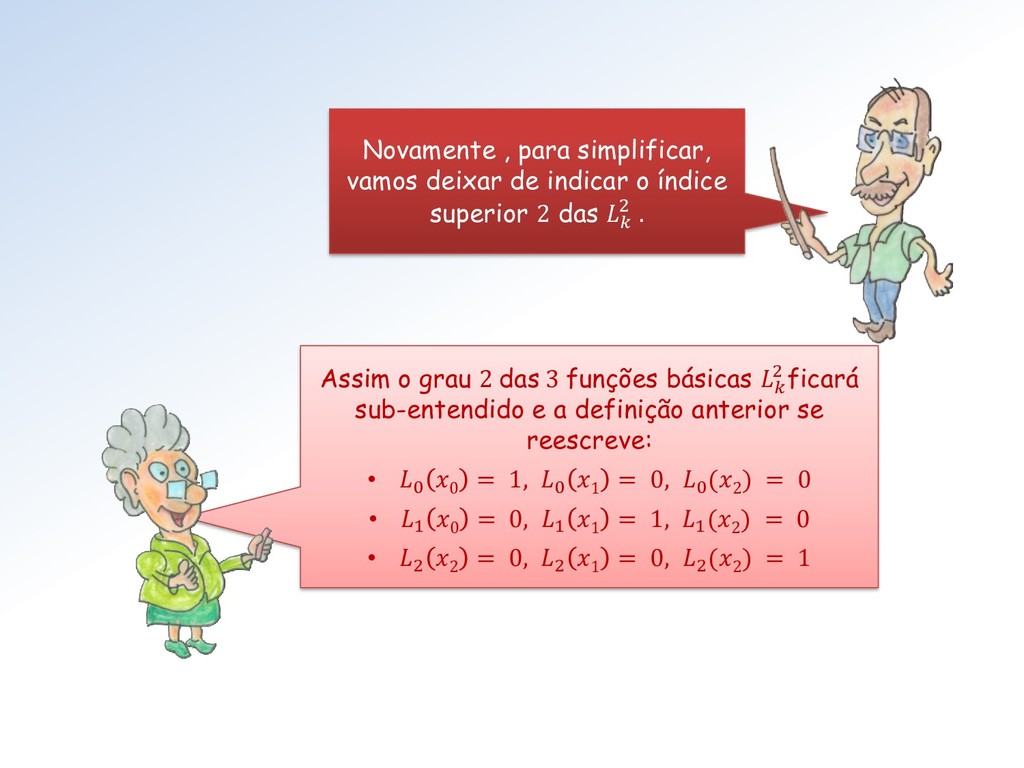
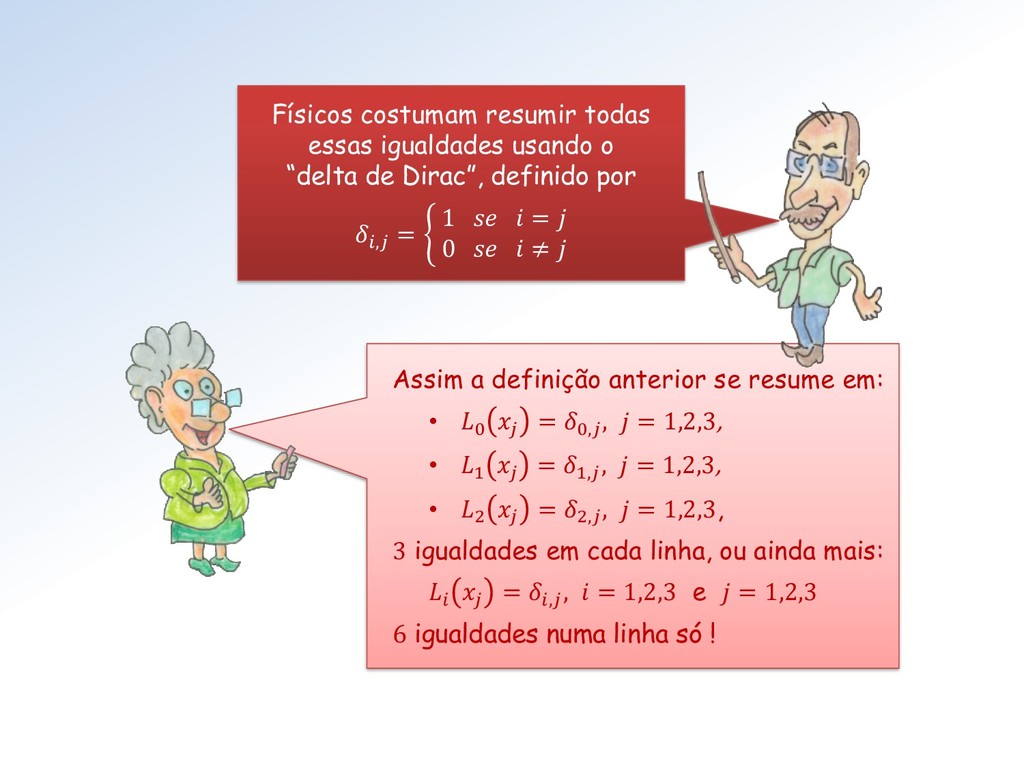
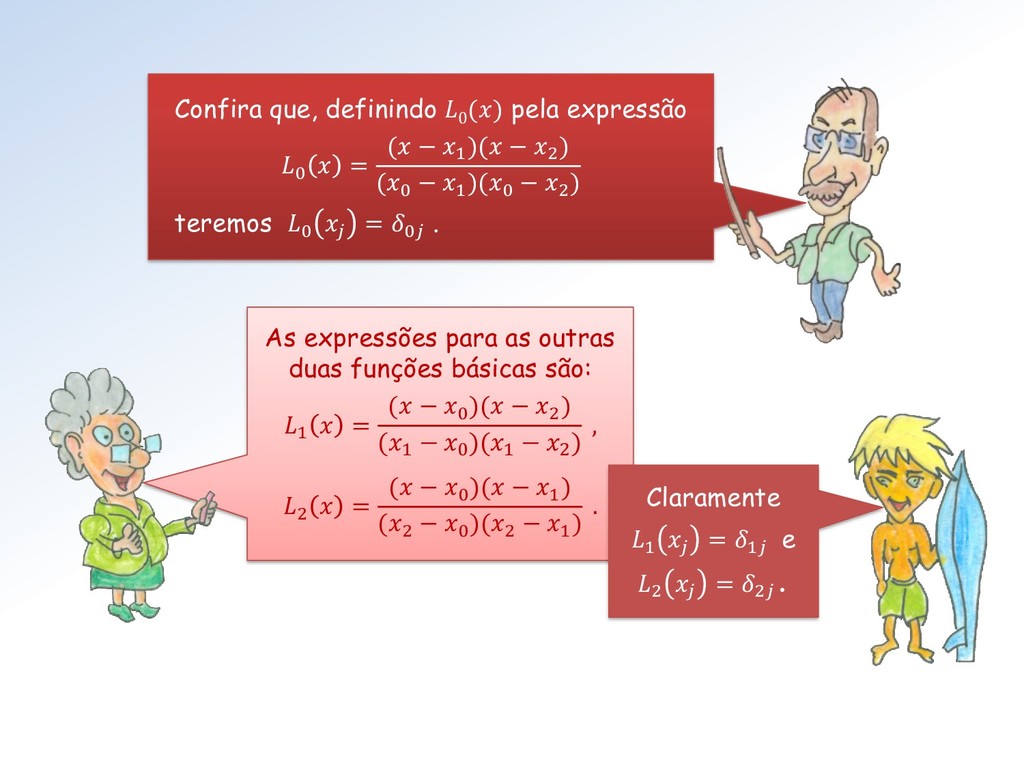
0, , = 1,2,3, • 1 = 1, , = 1,2,3, • 2 = 2, , = 1,2,3, 3 igualdades em cada linha, ou ainda mais: = , , = 1,2,3 e = 1,2,3 6 igualdades numa linha só ! Físicos costumam resumir todas essas igualdades usando o “delta de Dirac”, definido por , = ቊ 1 = 0 ≠
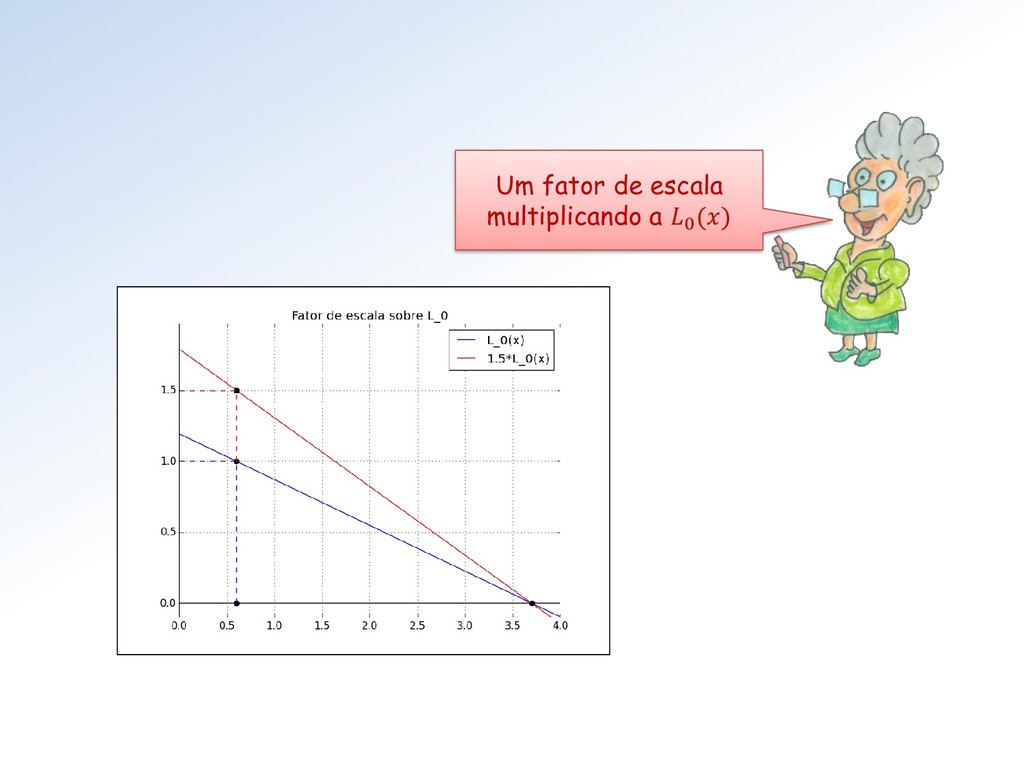
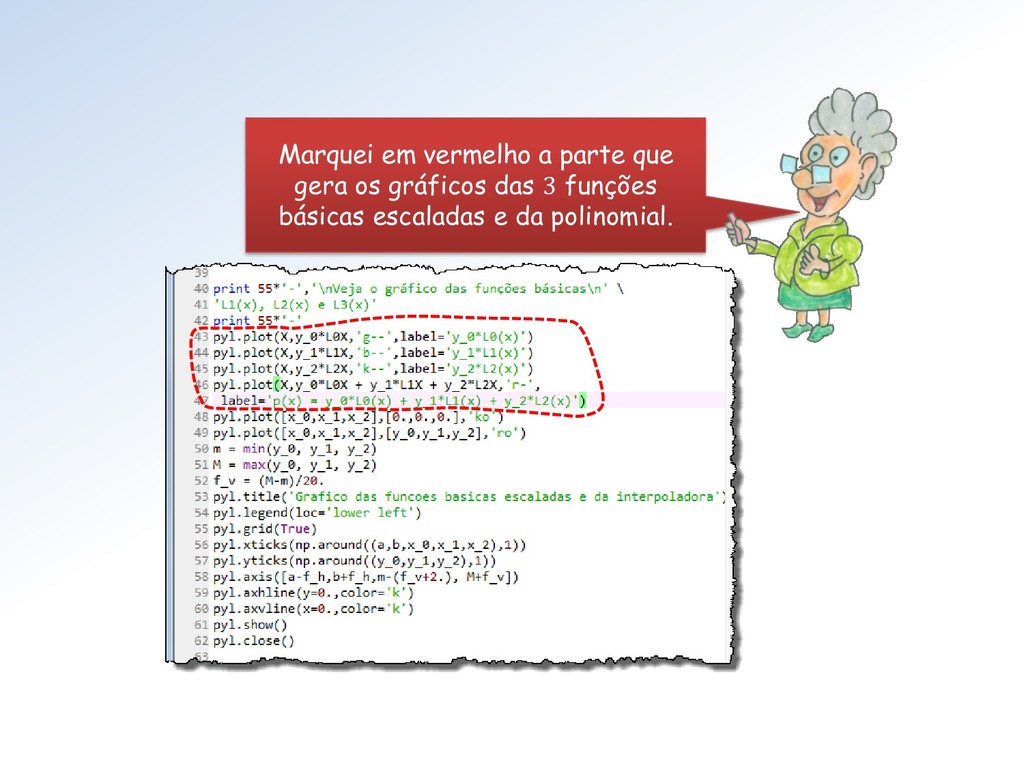
função escalada 1 1 () passará pelo ponto ( 1 , 1 ); • Multiplicando 2 () por um número 2 , a função escalada 2 2 () passará pelo ponto ( 2 , 2 ). A mesma ideia se aplica às outras duas funções básicas:
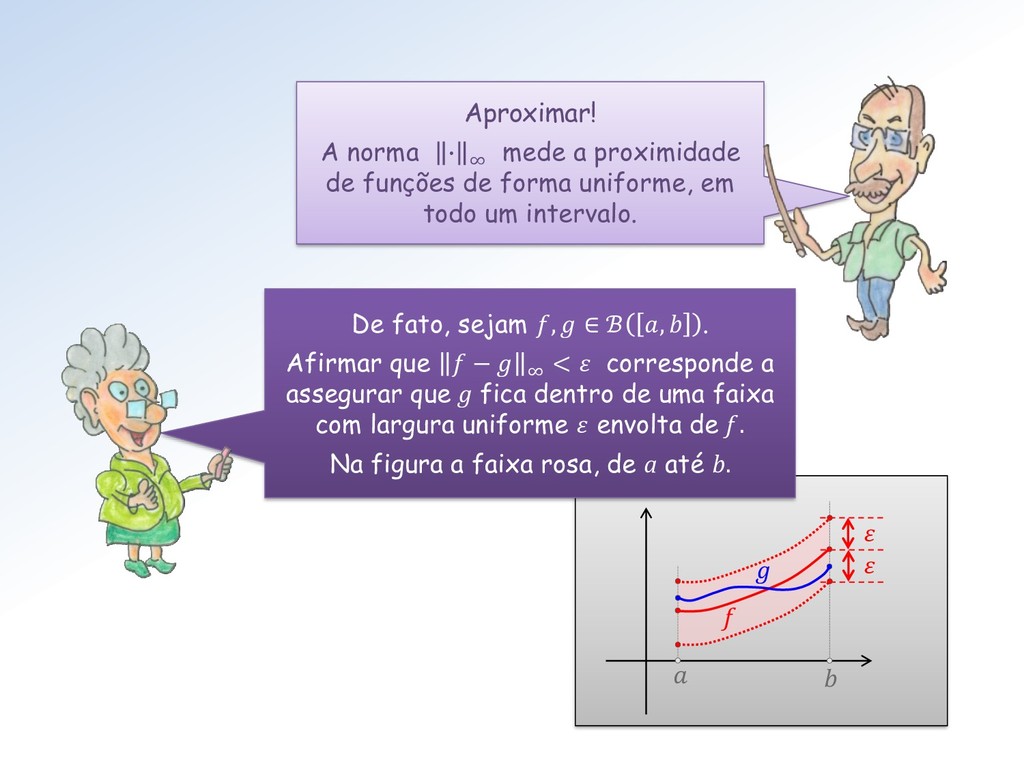
funções de forma uniforme, em todo um intervalo. De fato, sejam , ∈ ℬ , . Afirmar que − ∞ < corresponde a assegurar que g fica dentro de uma faixa com largura uniforme envolta de f . Na figura a faixa rosa, de a até b.
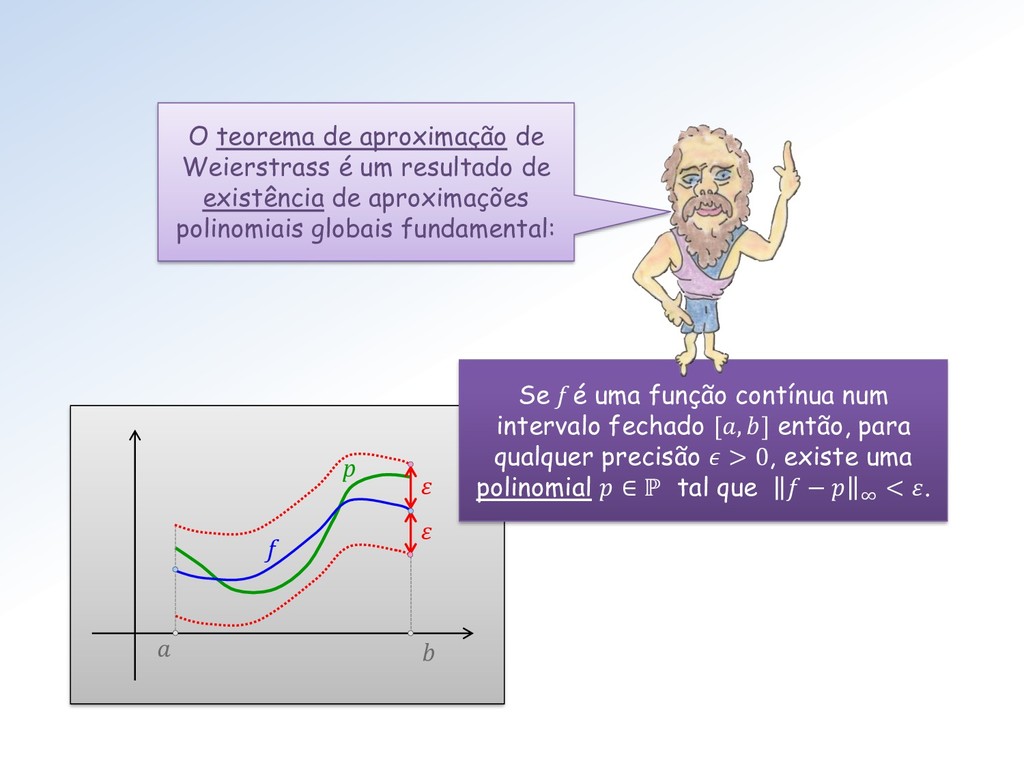
fechado [, ] então, para qualquer precisão > 0, existe uma polinomial ∈ ℙ tal que − ∞ < . O teorema de aproximação de Weierstrass é um resultado de existência de aproximações polinomiais globais fundamental:
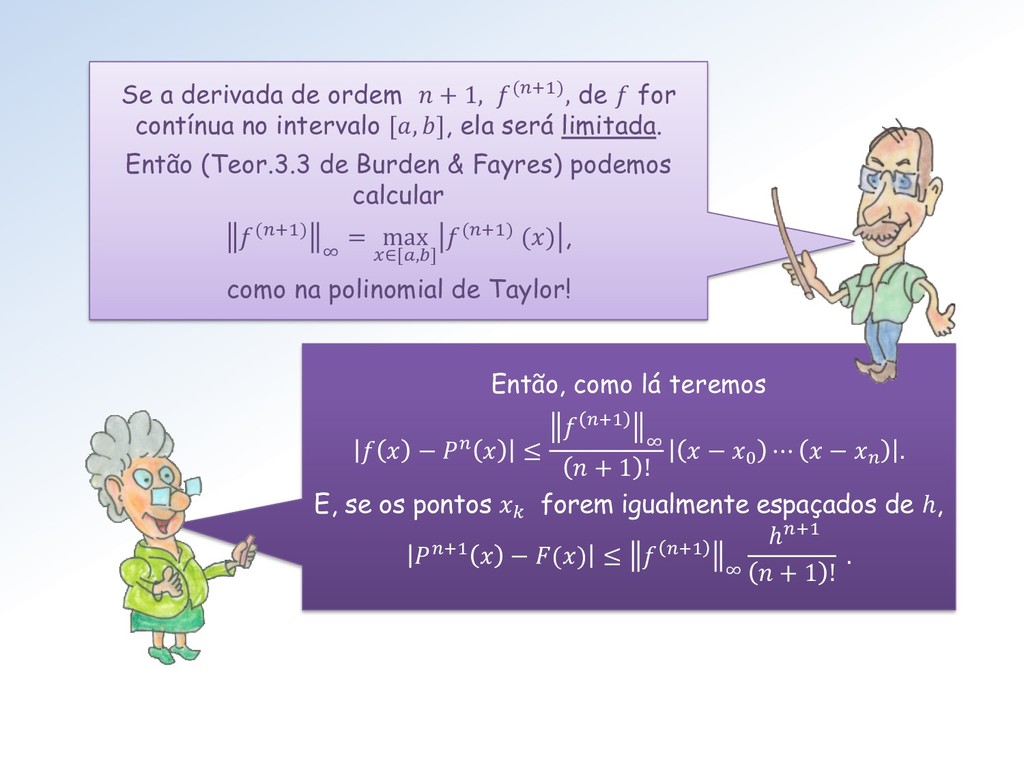
! − 0 ⋯ − . E, se os pontos forem igualmente espaçados de ℎ, +1 − () ≤ +1 ∞ ℎ+1 + 1 ! . Se a derivada de ordem + 1, (+1), de for contínua no intervalo [, ], ela será limitada. Então (Teor.3.3 de Burden & Fayres) podemos calcular (+1) ∞ = max ∈[,] (+1) () , como na polinomial de Taylor!
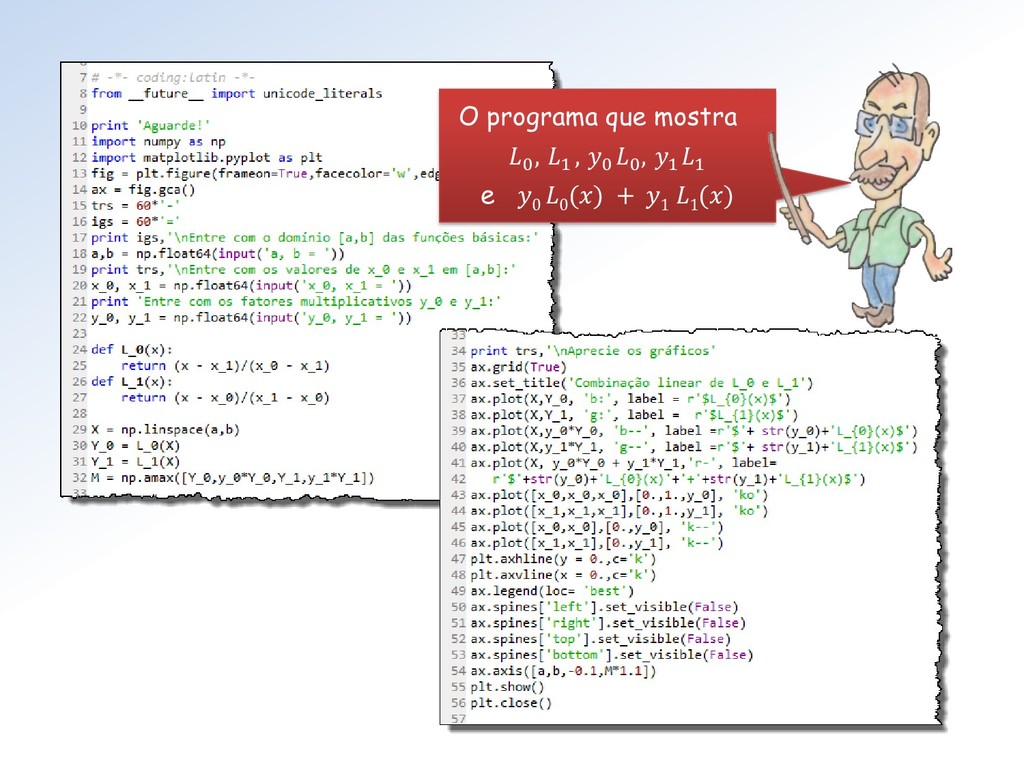
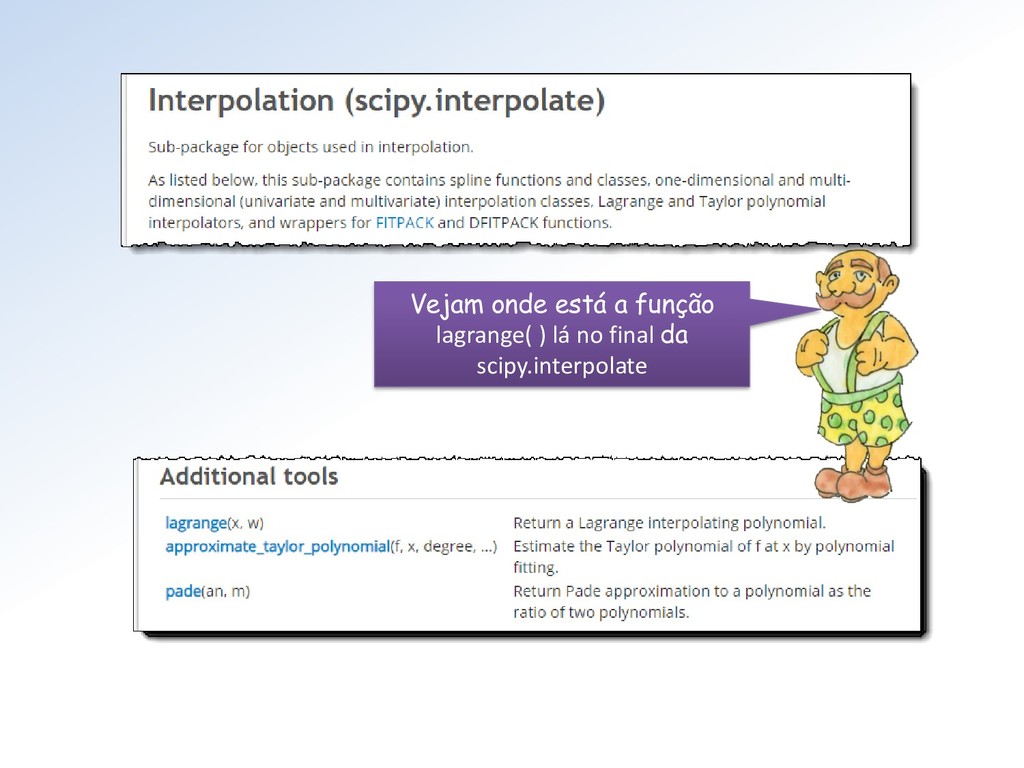
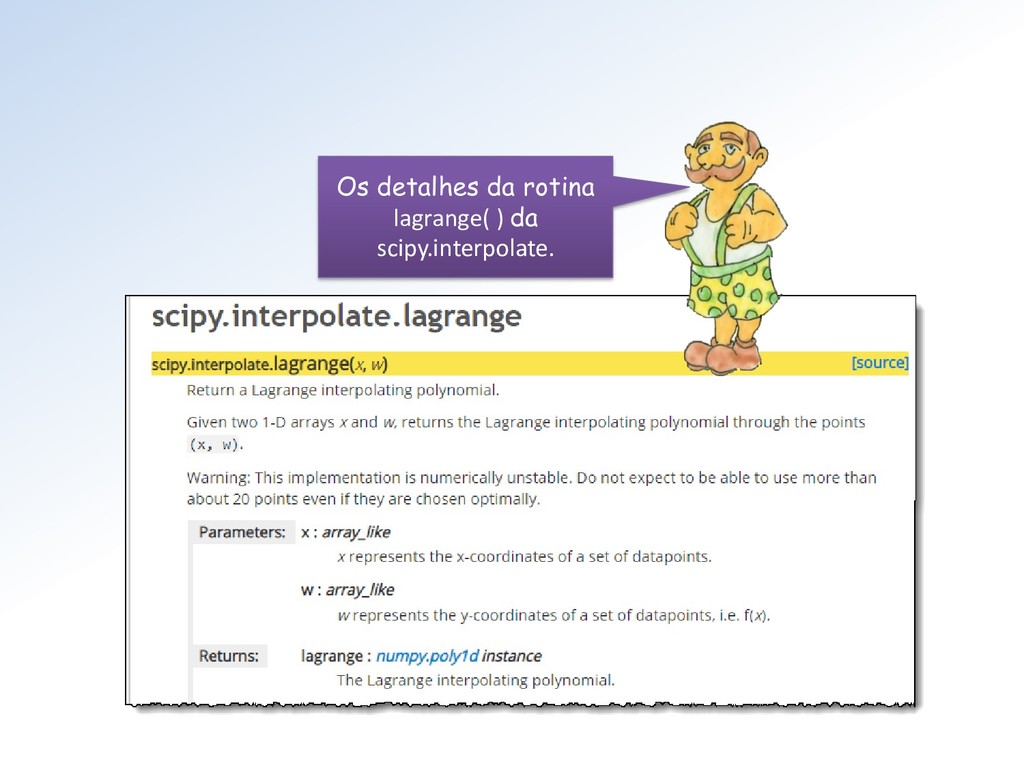
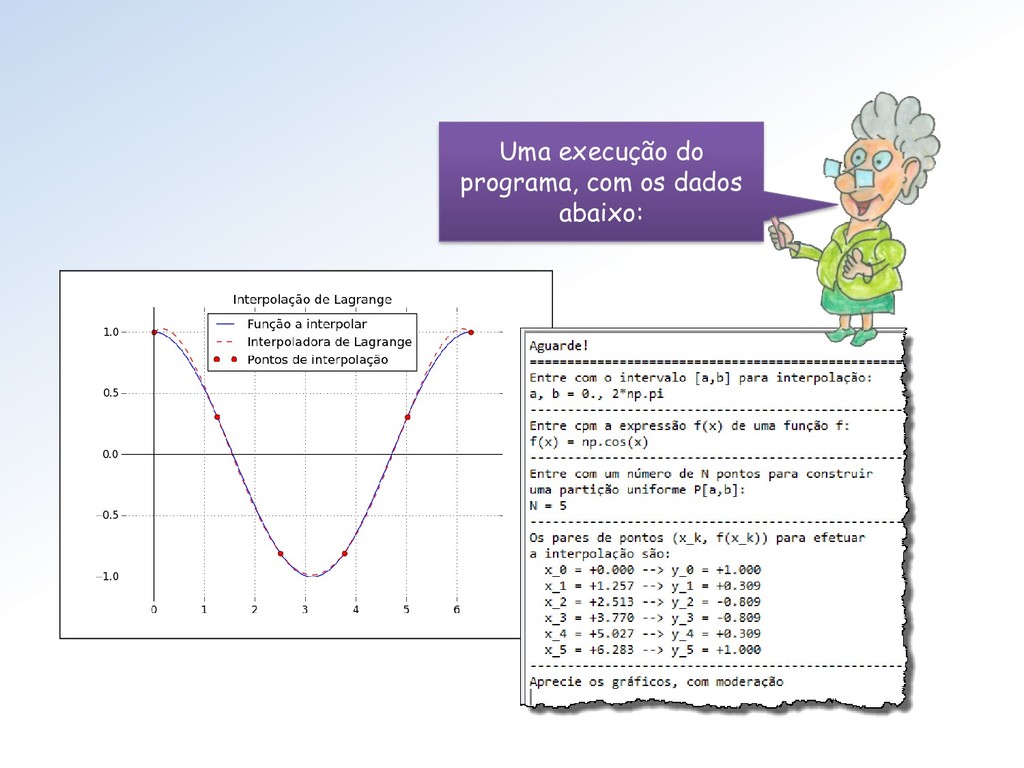
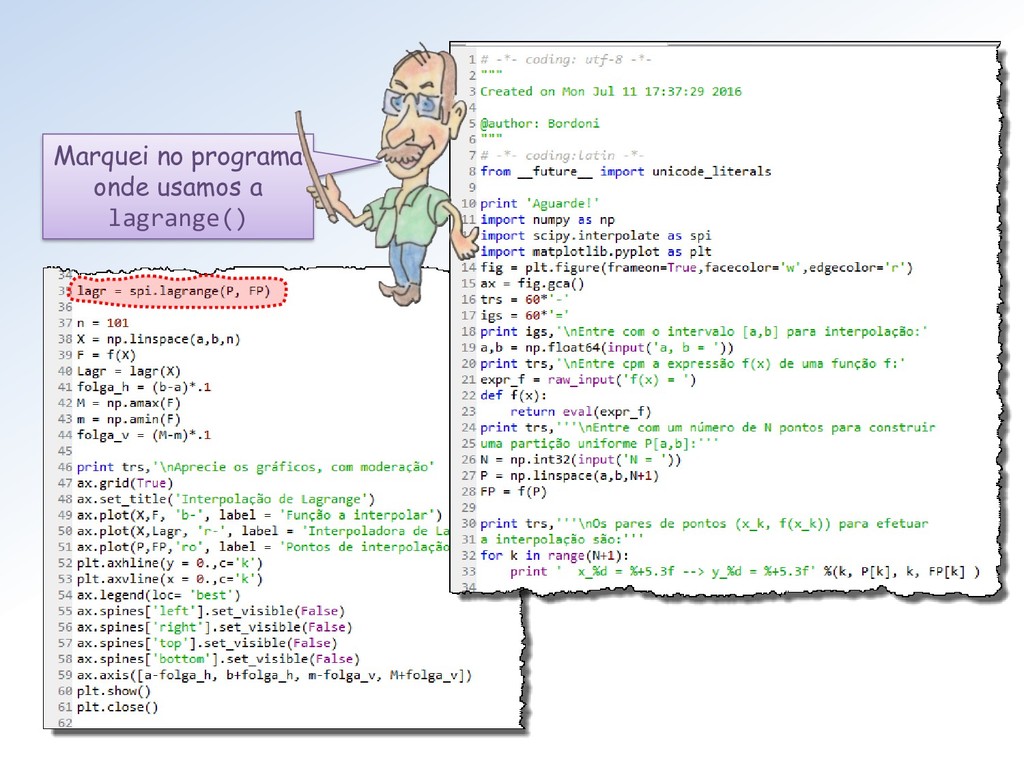
() de uma função, 3. Um número de pontos para criar uma partição uniforme de , . • Constrói a interpoladora de Lagrange da função usando a rotina lagrange() da SciPy. • E devolve: 1. Uma tabela dos pares dos pares , ( ) , 2. Os gráficos de e da interpoladora de Lagrange da função sobre a partição , . Faremos um programa que:
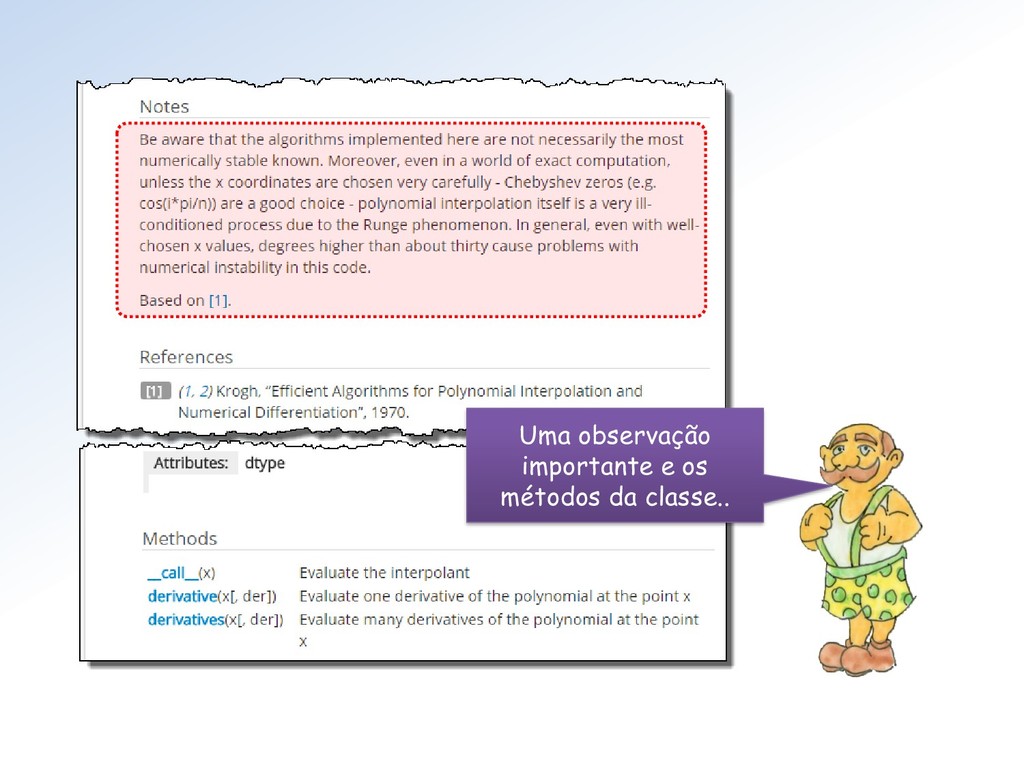
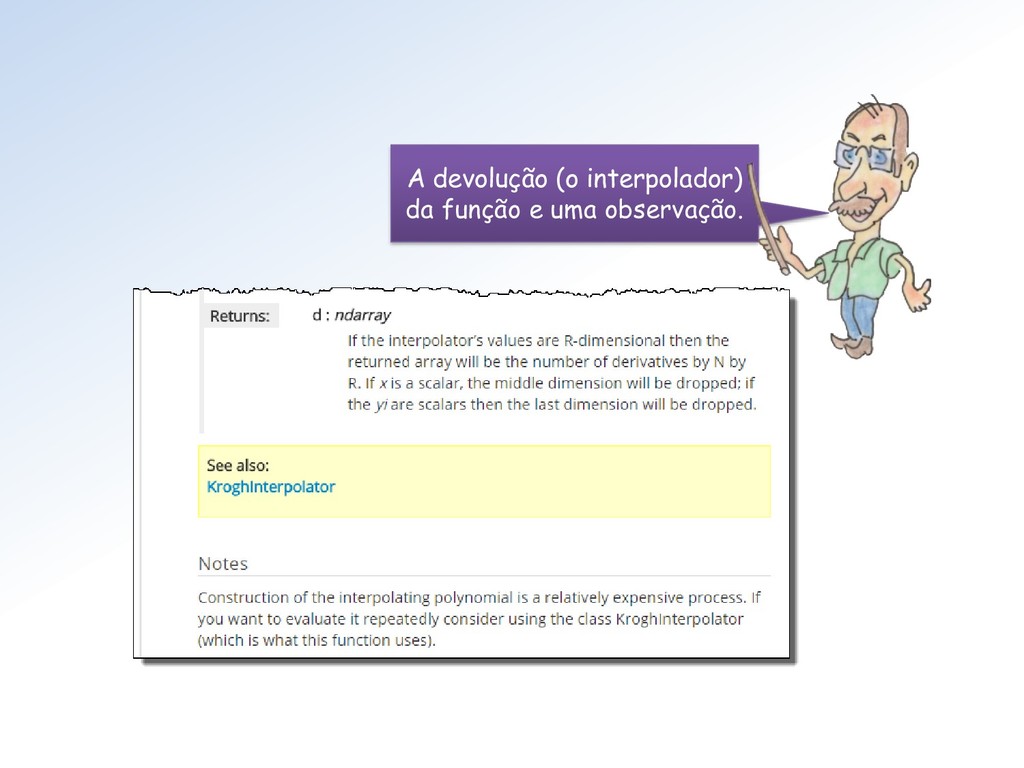
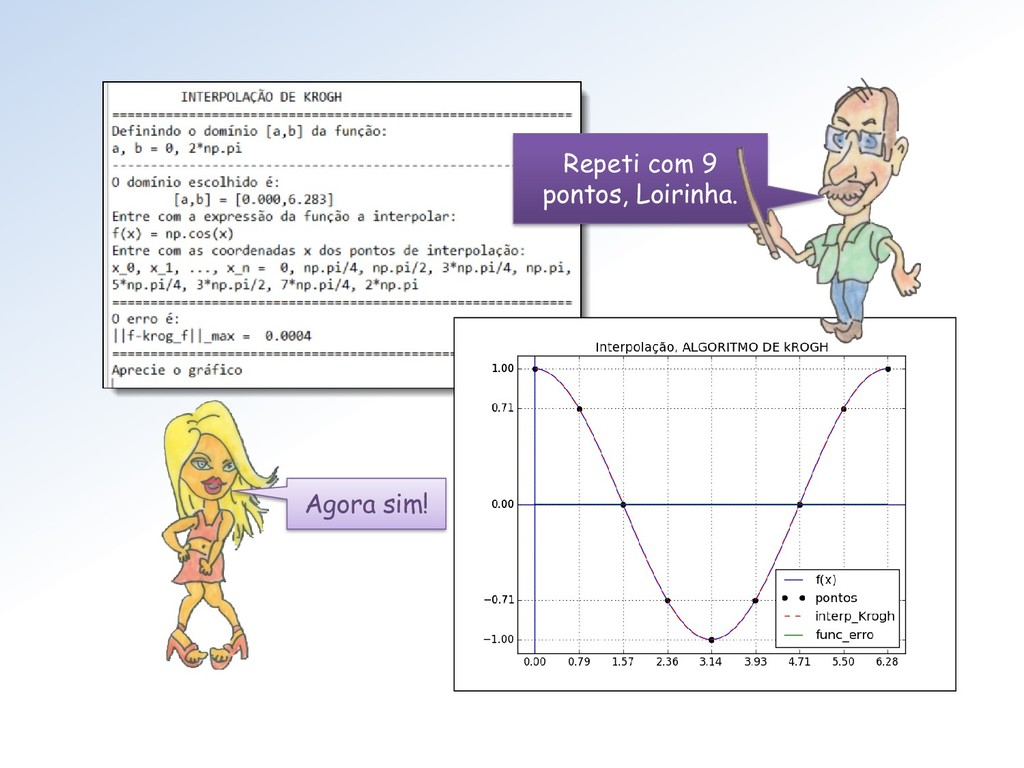
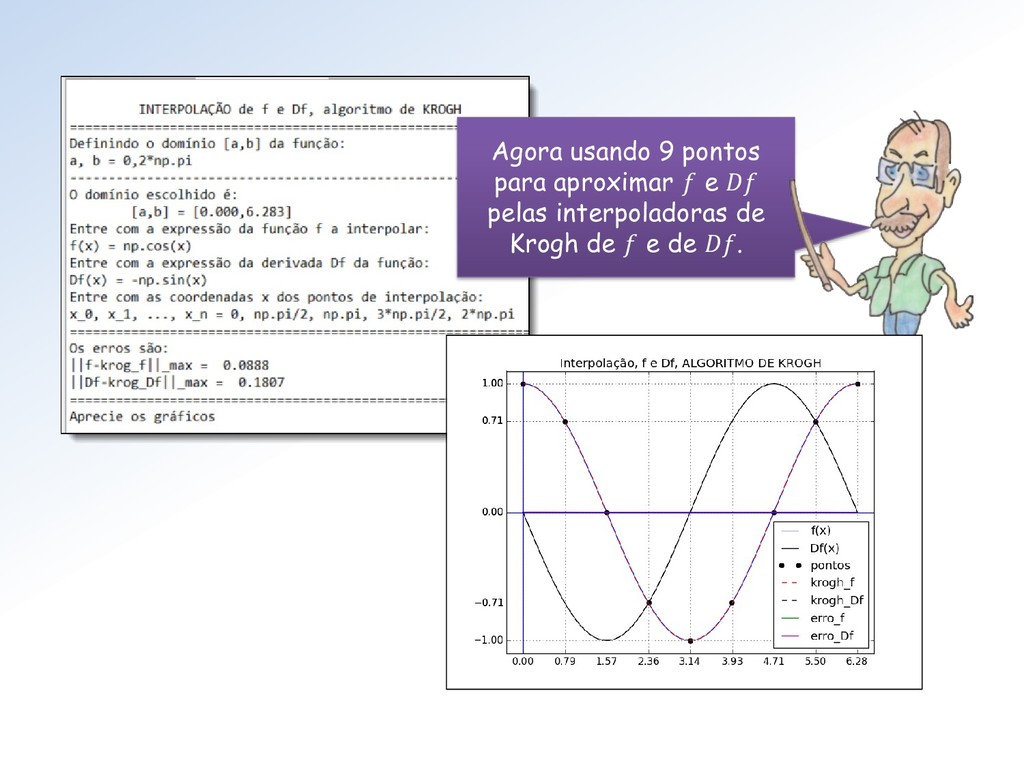
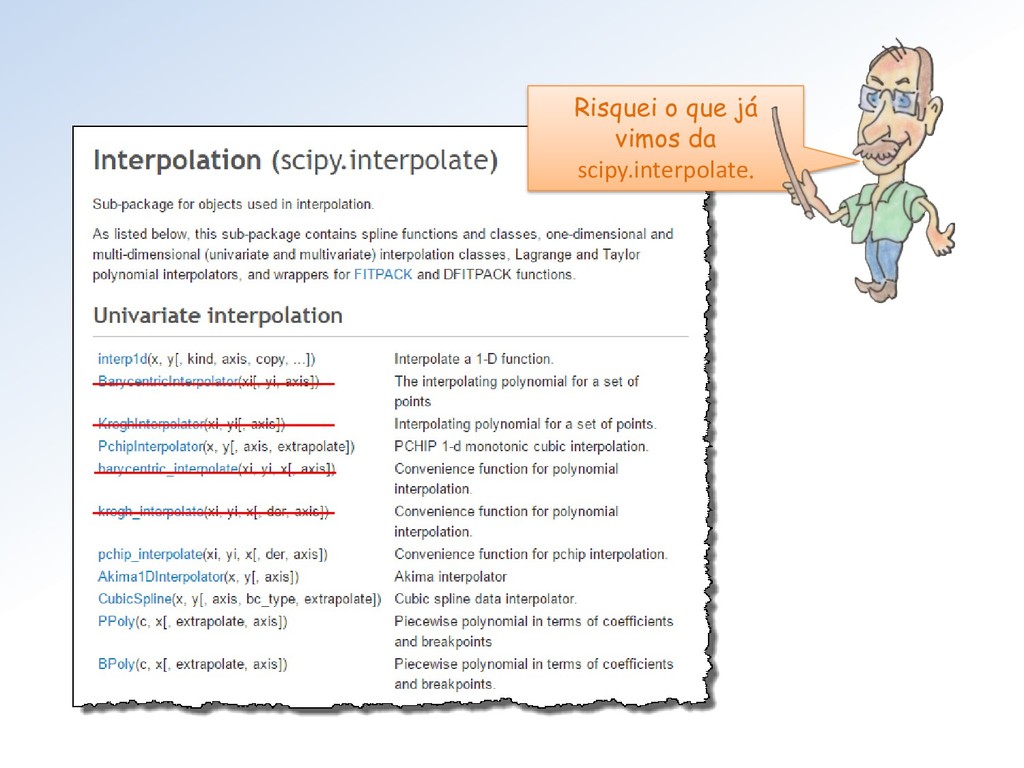
detalhados os algoritmos de Krogh empregados pela scipy.interpolate Inclusive o artigo compara número de operações com os algoritmos de Lagrange e Aitken/Neville, mostrando que os propostos por Krogh tem melhor performance.
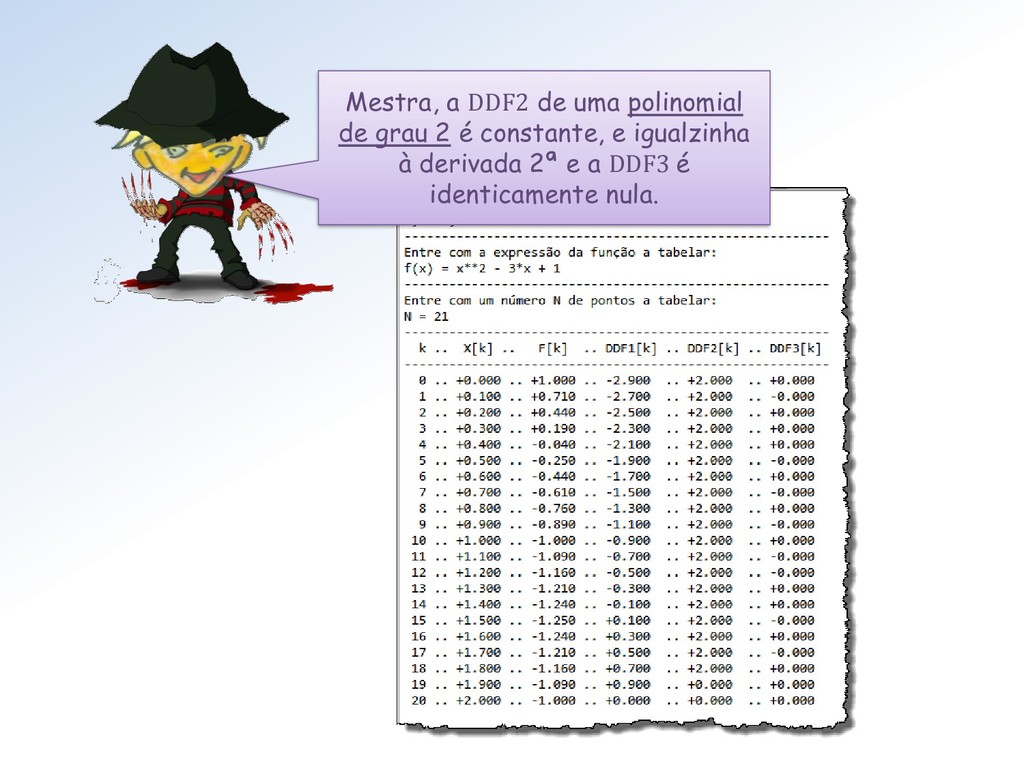
período anterior disse que o professor exigia que essas tabelas de DDF fossem feitas à mão. Já ouvi falar dessa besteira. São mestres da idade da pedra.
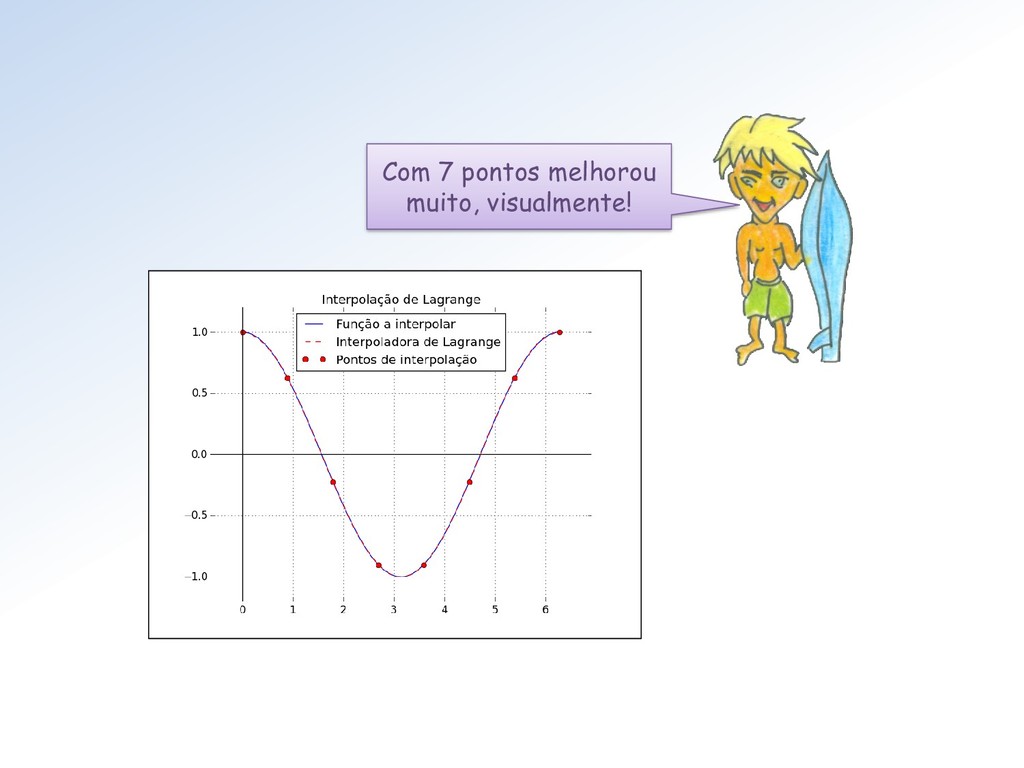
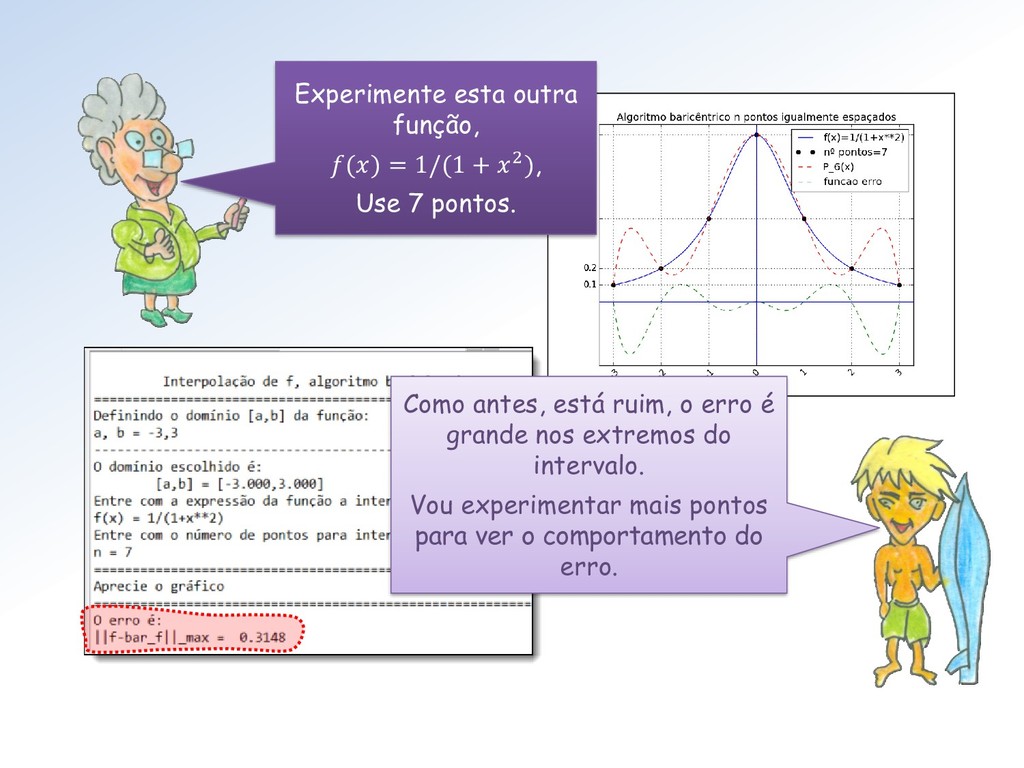
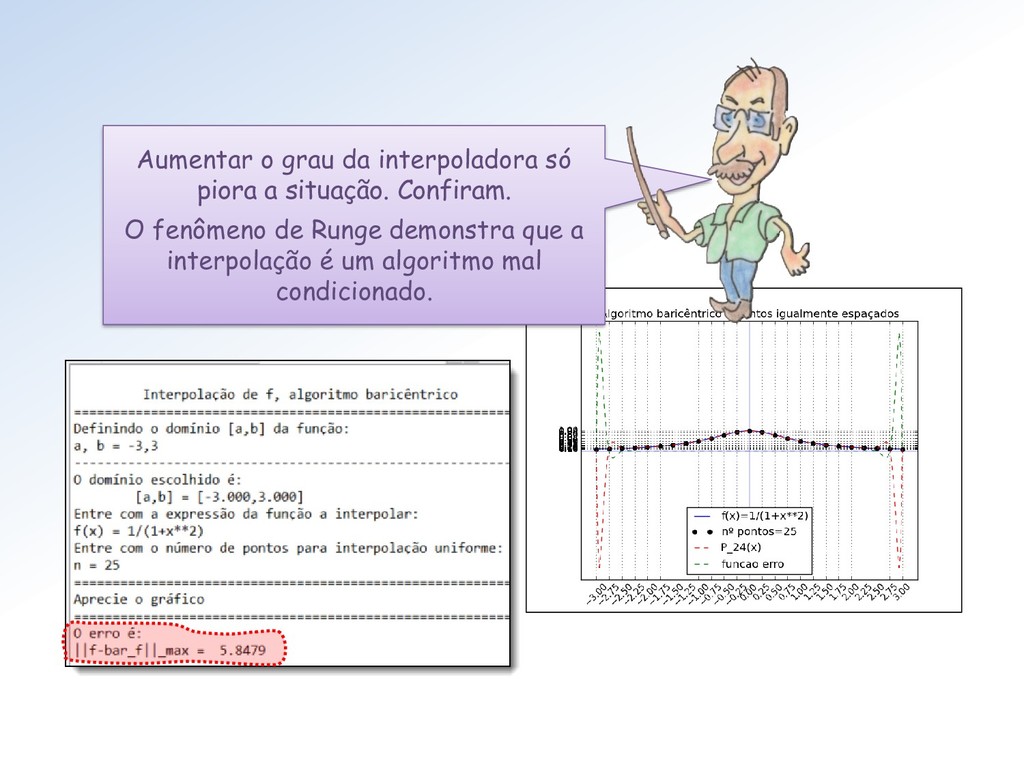
ao aumentarmos o grau da interpoladora, surge o fenômeno de Runge! Mestres, parece que aumentar o grau da polinomial interpoladora não melhora a precisão da interpolação.
o valor da máximo da função Ele Ru(n)ge cada vez mais e vai devorar o Mestre! Pois é Surfista, mas para a função de Runge, = 1/(1 + 2), isto não acontece!
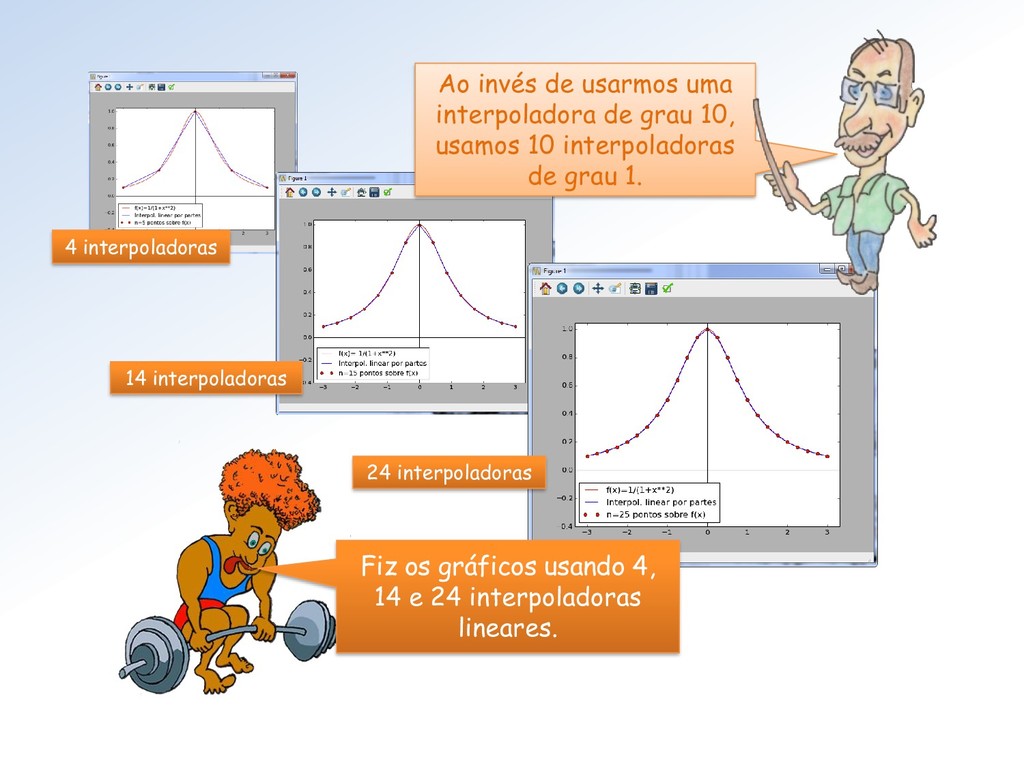
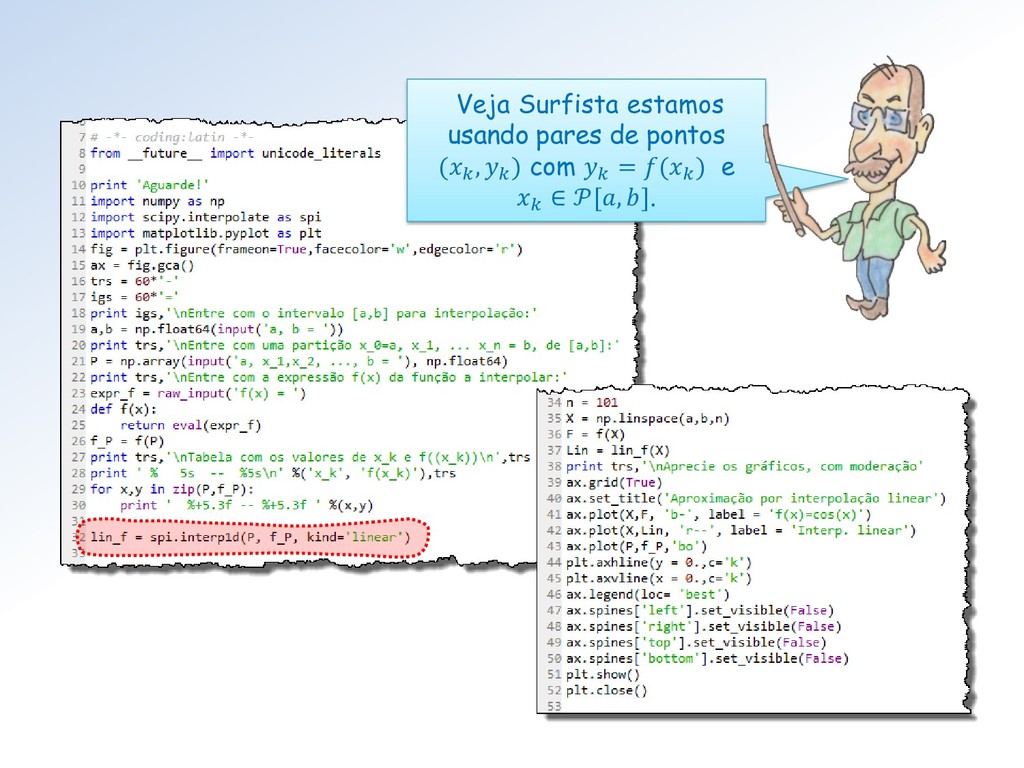
A expressão de uma função : [, ] → ℝ, 3. Uma partição de , , 4. A opção por kind = ′linear′ para a interpoladora. • E devolve: 1. Uma tabela dos pares dos pares , ( ) , 2. Os gráficos de e da interpoladora linear por partes de Lagrange da função sobre a partição , . Agora faremos uma interpolação linear por partes de uma função : [, ] → ℝ.
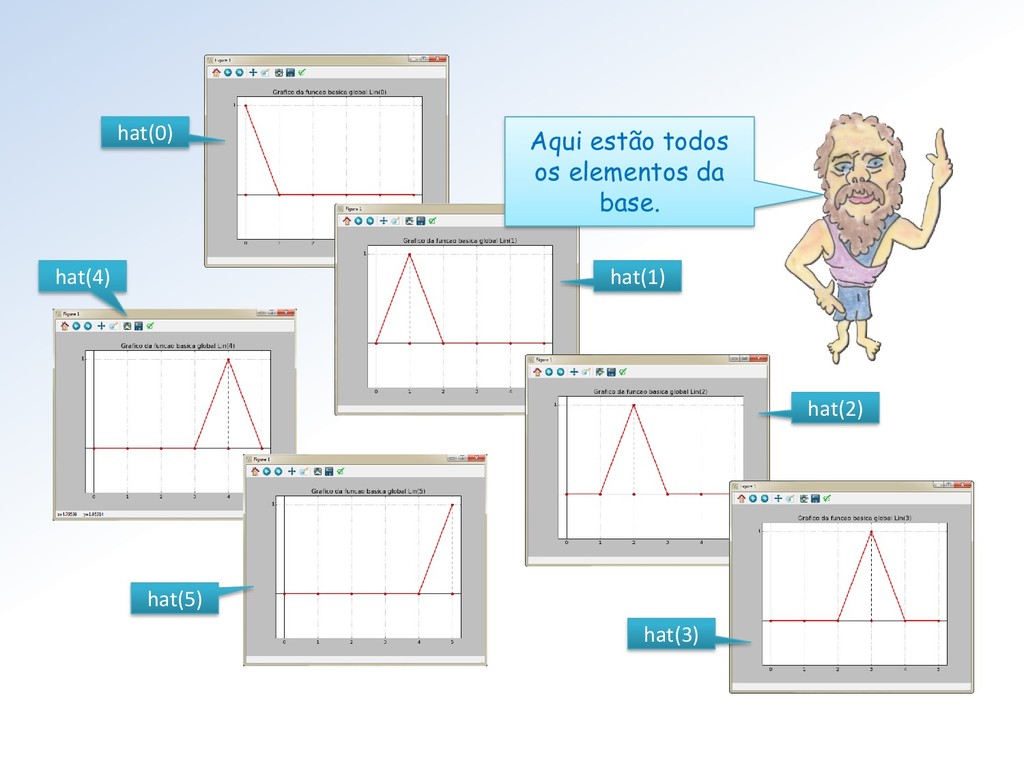
de usar. Ele é constituído pelas funções que são contínuas num intervalo [, ] e lineares em cada sub-intervalo de uma partição [, ] = { = 0 < 1 < ⋯ < = } de [, ].
de , de dimensão finita + 1. E a característica fundamental das funções básicas é que elas se anulam fora de dois subintervalos (i. é possuem suporte compacto).
descreve um método para calcular produtos em termos de somas. Nasciam os logaritmos. O livro apresenta ainda 90 páginas com tabelas para utilização do seu método
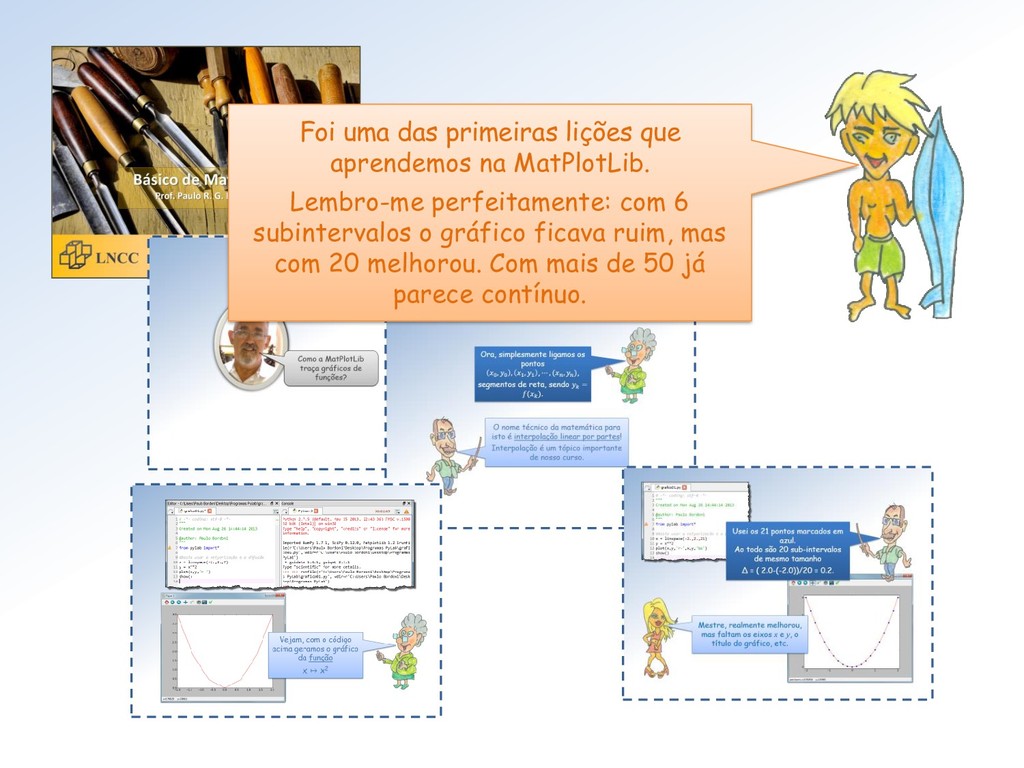
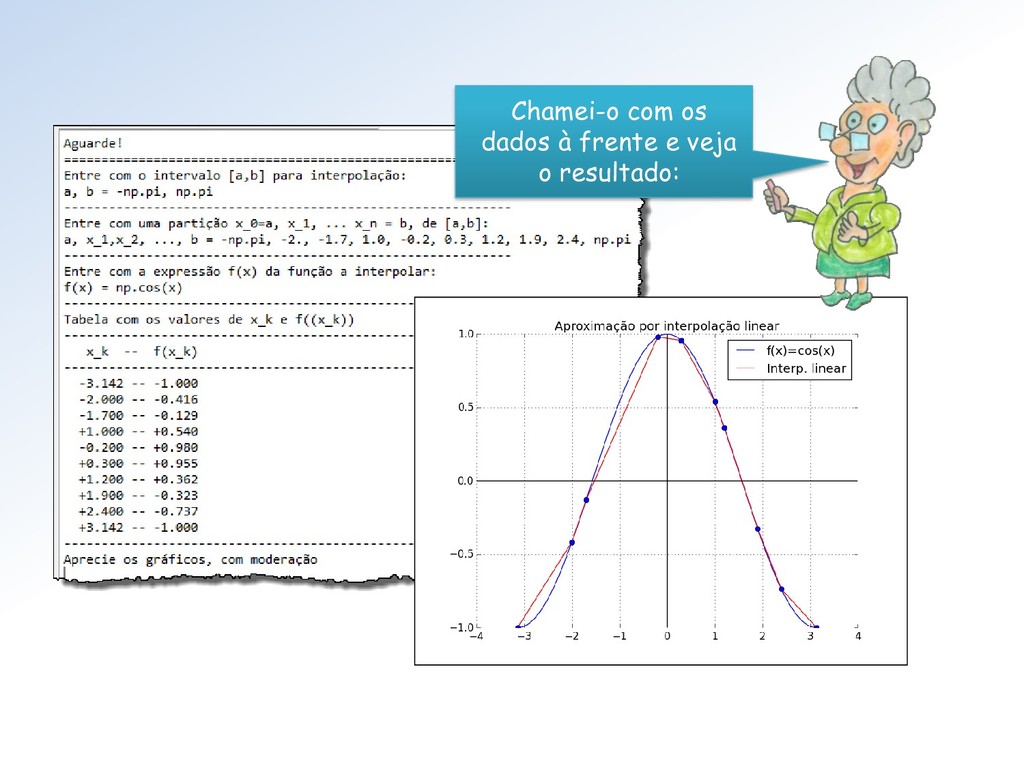
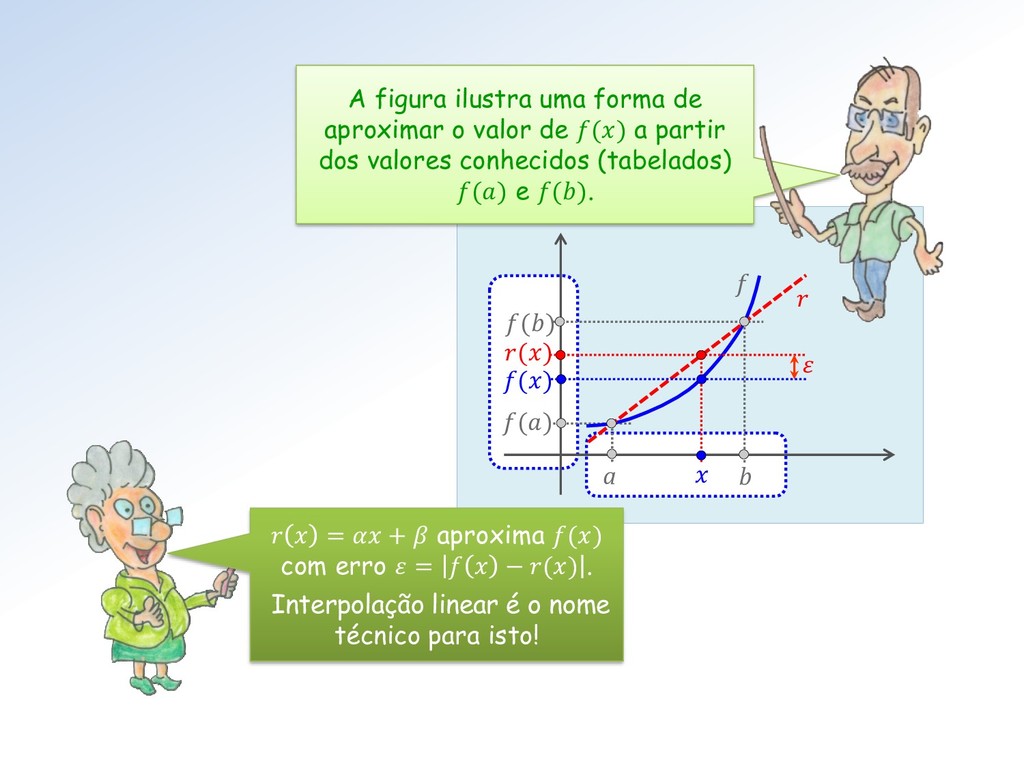
forma de aproximar o valor de () a partir dos valores conhecidos (tabelados) () e (). = + aproxima () com erro = − () . Interpolação linear é o nome técnico para isto!
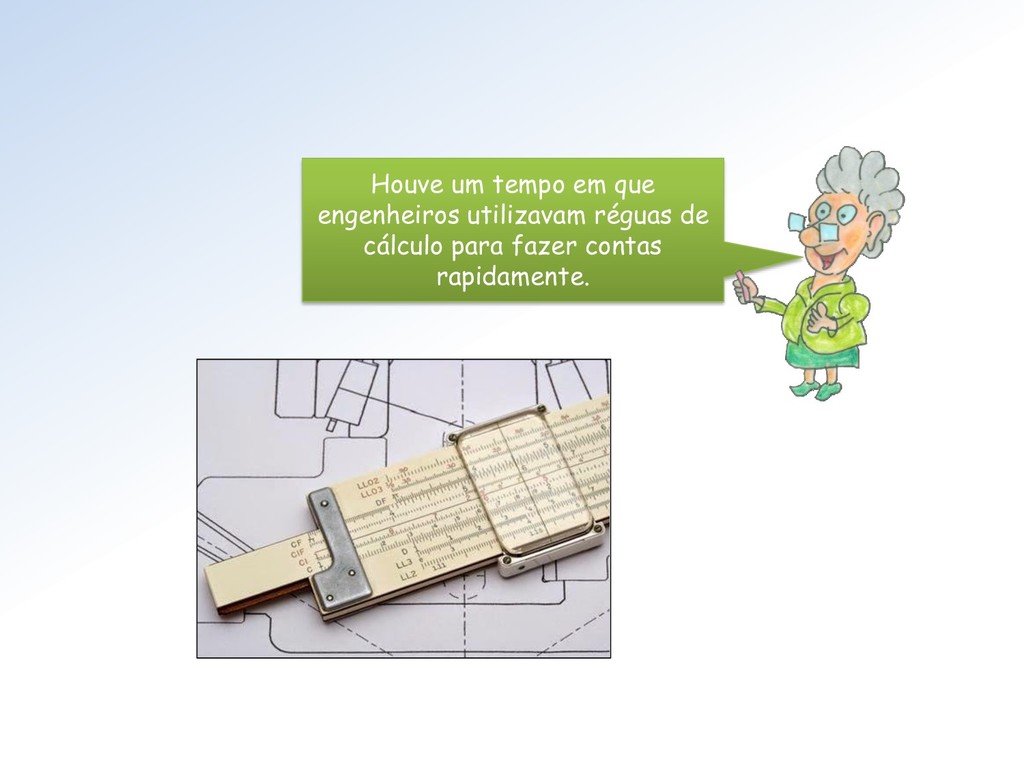
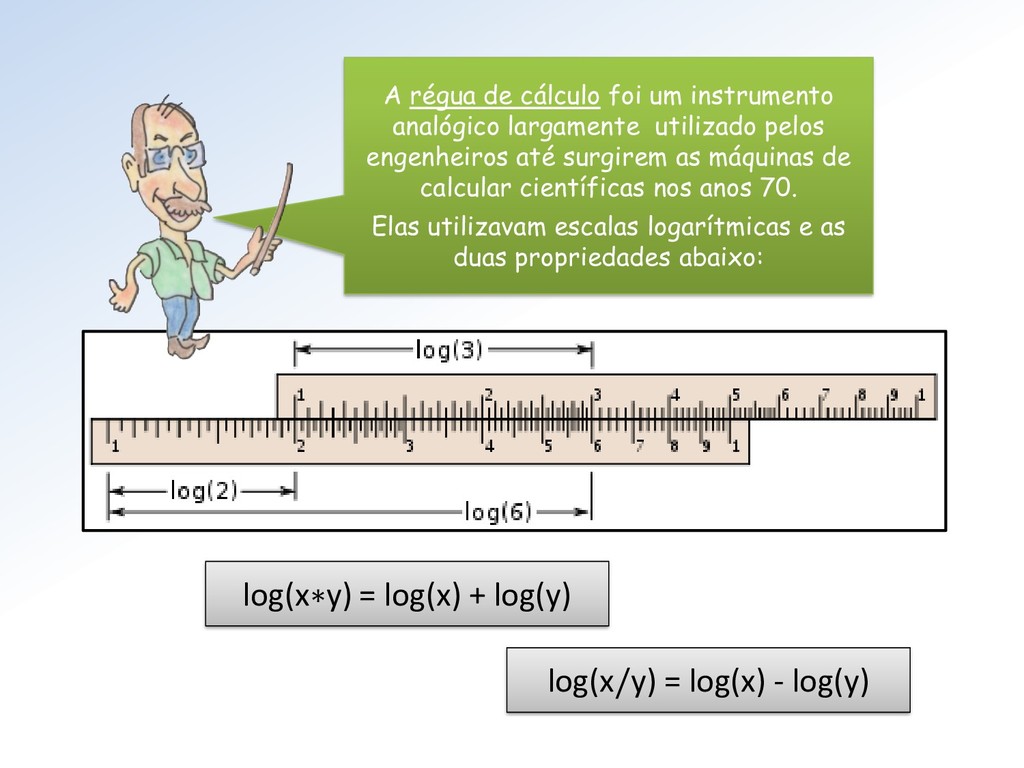
A régua de cálculo foi um instrumento analógico largamente utilizado pelos engenheiros até surgirem as máquinas de calcular científicas nos anos 70. Elas utilizavam escalas logarítmicas e as duas propriedades abaixo:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Em ℙ2[, ], que tem dimensão três, as funções básicas](https://files.speakerdeck.com/presentations/e04986d8971545adb0ebf71b5eb938ca/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![• Recebe: 1. Um intervalo [, ], 2. A expressão](https://files.speakerdeck.com/presentations/e04986d8971545adb0ebf71b5eb938ca/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Um programa para interpolar uma função : [, ] →](https://files.speakerdeck.com/presentations/e04986d8971545adb0ebf71b5eb938ca/slide_62.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![O programa: • Recebe: 1. Um intervalo [, ], 2.](https://files.speakerdeck.com/presentations/e04986d8971545adb0ebf71b5eb938ca/slide_90.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}