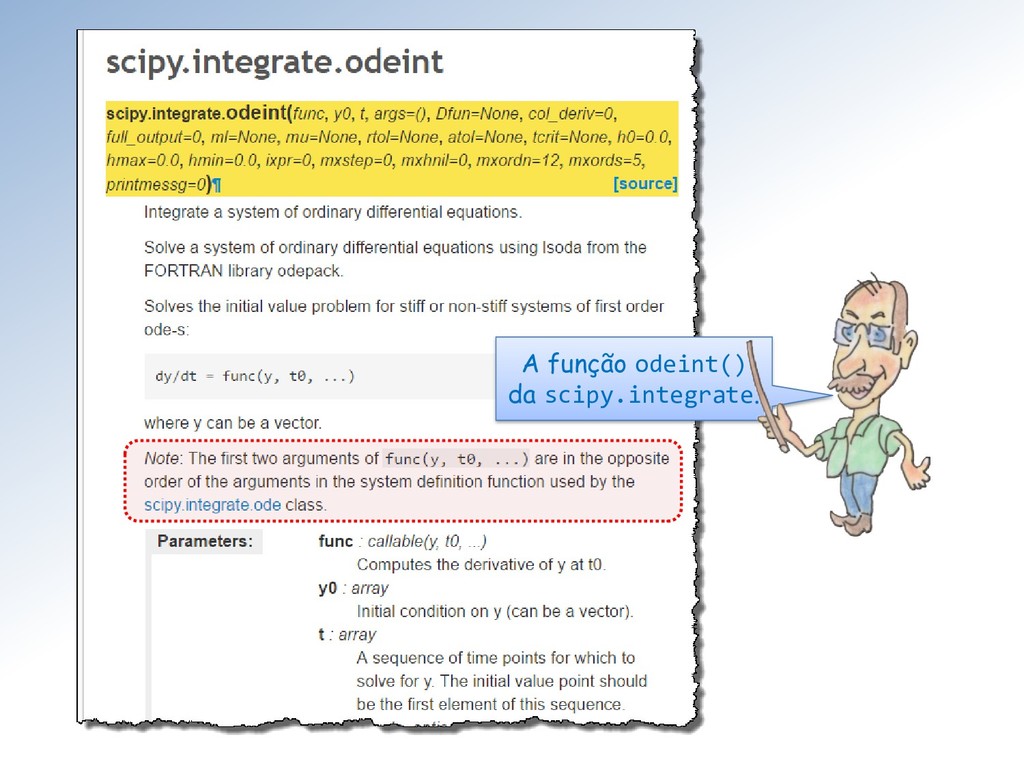
ordem é ′ = , na qual : ⊂ ℝ × ℝ → ℝ é uma função a valores reais definida num aberto do plano (, ) e ′ = Τ . Nas equações diferenciais a incógnita é uma função.
são vetores de ℝ então ′ = (, ) é uma equação vetorial que descreve um sistema de EDOs. O estudo de EDO’s remonta aos inventores do Cálculo Diferencial e Integral, Newton e Leibnitz, entorno dos anos 1670. Euler (século XVIII) apresentou contribuições fundamentais.
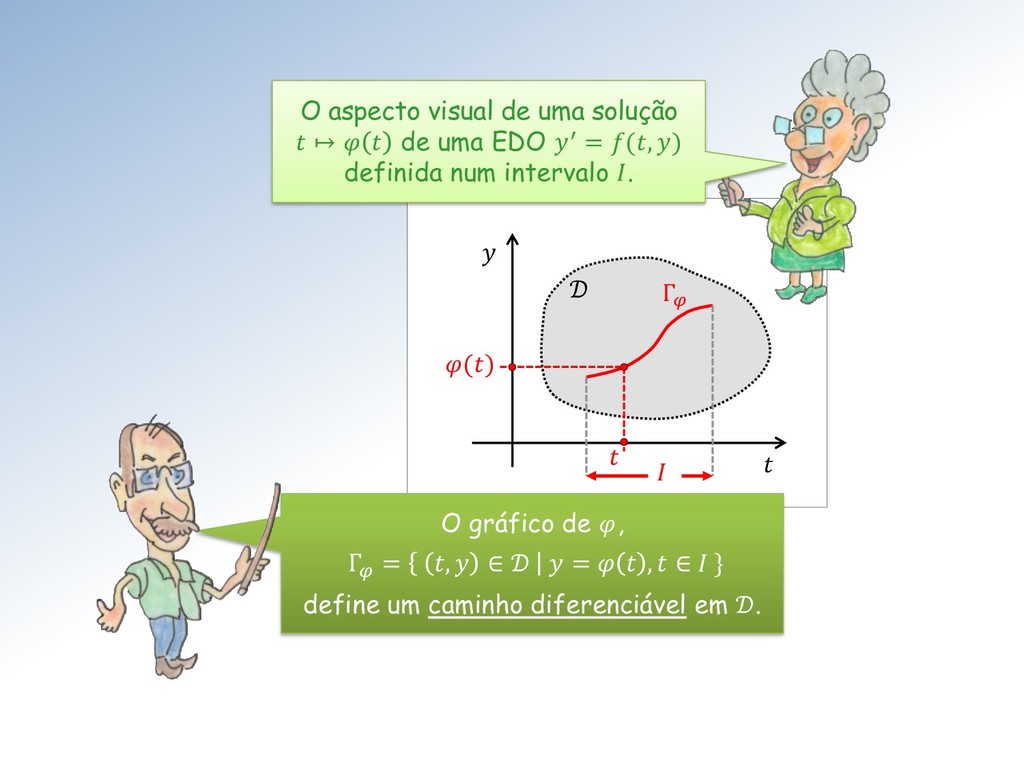
, 0 ) ∈ ℝ e se ↦ () é uma solução da EDO então ′ 0 = (0 , 0 ). Portanto a inclinação de no ponto 0 é o número = 0 , 0 pois 0 = 0 ! Loirinha, a interpretação geométrica da solução de uma EDO é belíssima. Explique à ela Mestra!
de , a EDO ′ = (, ) é linear. Caso = 0 a equação é homogênea. No caso de sistemas de equações lineares, () é uma matriz × . Nesse caso tanto = () como () são vetores de ordem .
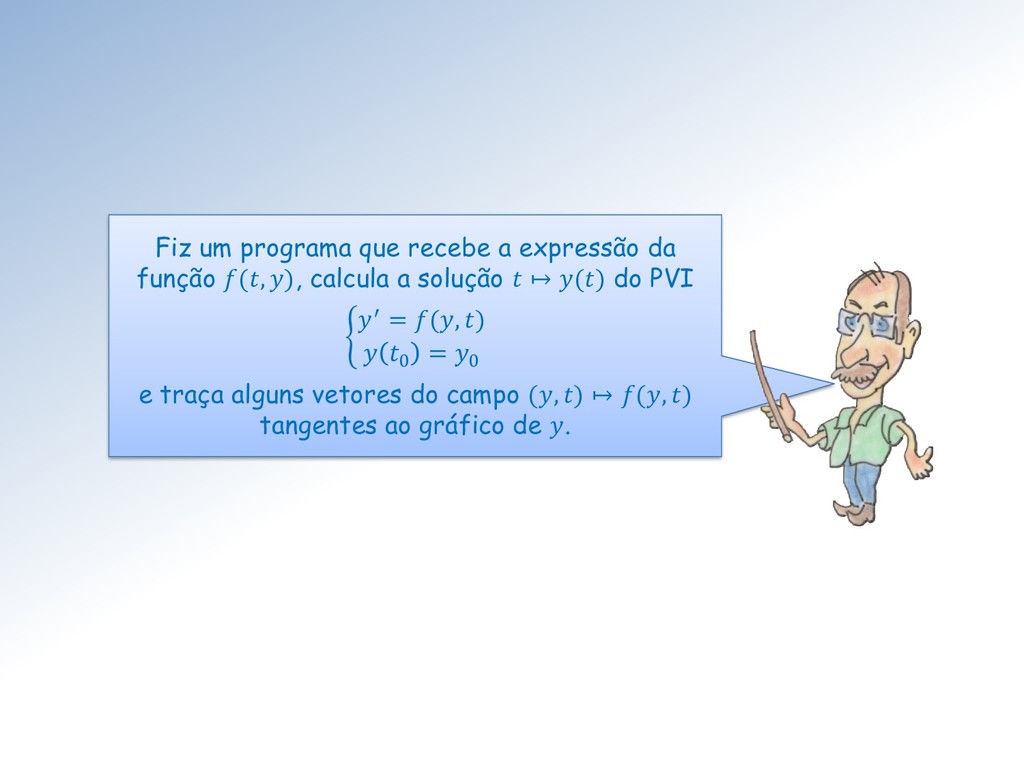
e um ponto 0 , 0 ∈ , um problema de valor inicial para uma EDO ′ = (, ) consiste em determinar um intervalo aberto = 0 − , 0 + , > 0 e uma função diferenciável : → ℝ, t ↦ tais que: é solução da EDO: ′ = , , ∀ ∈ e satisfaz a condição inicial 0 = 0 Problema de Valor Inicial
fundamental do cálculo teremos − (0 ) = න 0 ′ , e como 0 = 0 obtemos = 0 + න 0 . Se, num PVI ቊ ′ = , 0 = 0 para uma EDO, a função : → ℝ independe da variavel , isto é , ↦ a solução é obtida por integração direta.
primitiva explícita, poderemos obter a solução por integração numérica. Claro, aliás esta é a associação entre EDO’s e integração numérica, explicitada na NumPy.
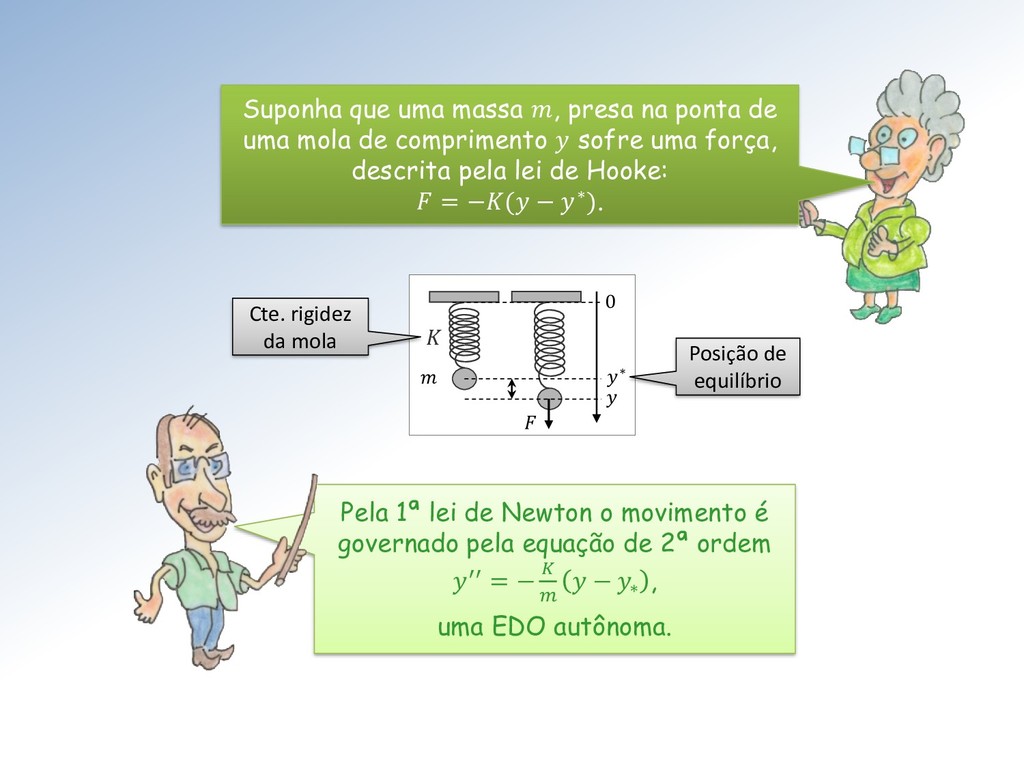
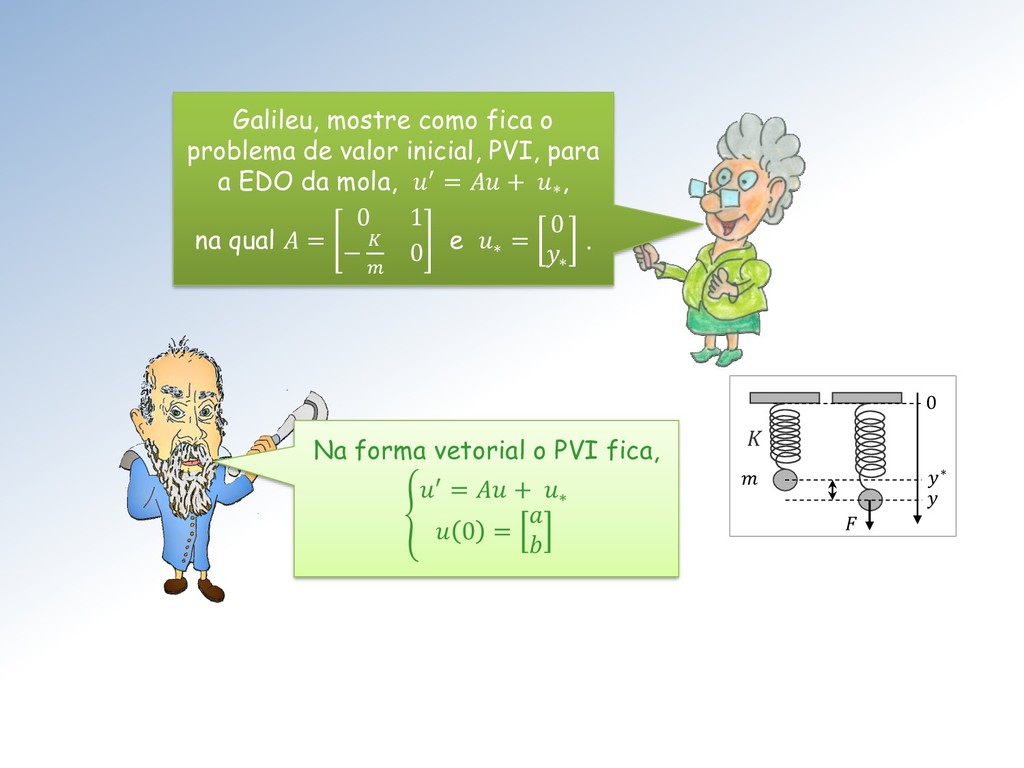
de uma mola de comprimento sofre uma força, descrita pela lei de Hooke: = −( − ∗). Pela 1ª lei de Newton o movimento é governado pela equação de 2ª ordem ′′ = − − ∗ , uma EDO autônoma. Posição de equilíbrio Cte. rigidez da mola
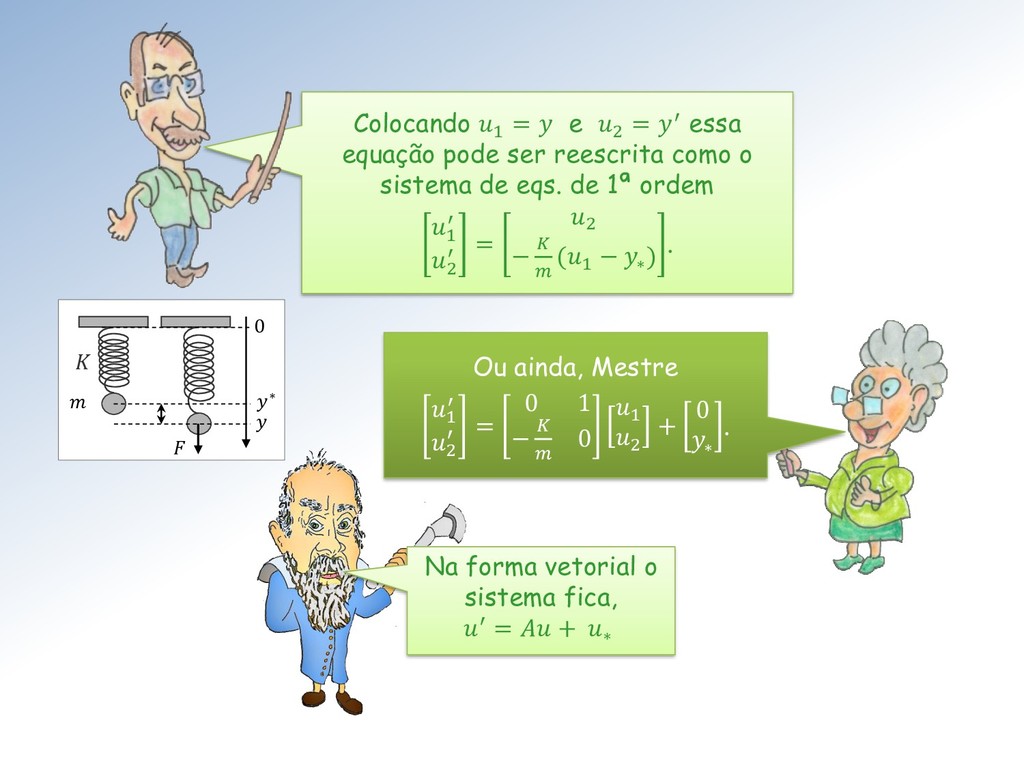
ser reescrita como o sistema de eqs. de 1ª ordem 1 ′ 2 ′ = 2 − (1 − ∗ ) . ∗ 0 Ou ainda, Mestre 1 ′ 2 ′ = 0 1 − 0 1 2 + 0 ∗ . Na forma vetorial o sistema fica, ′ = + ∗
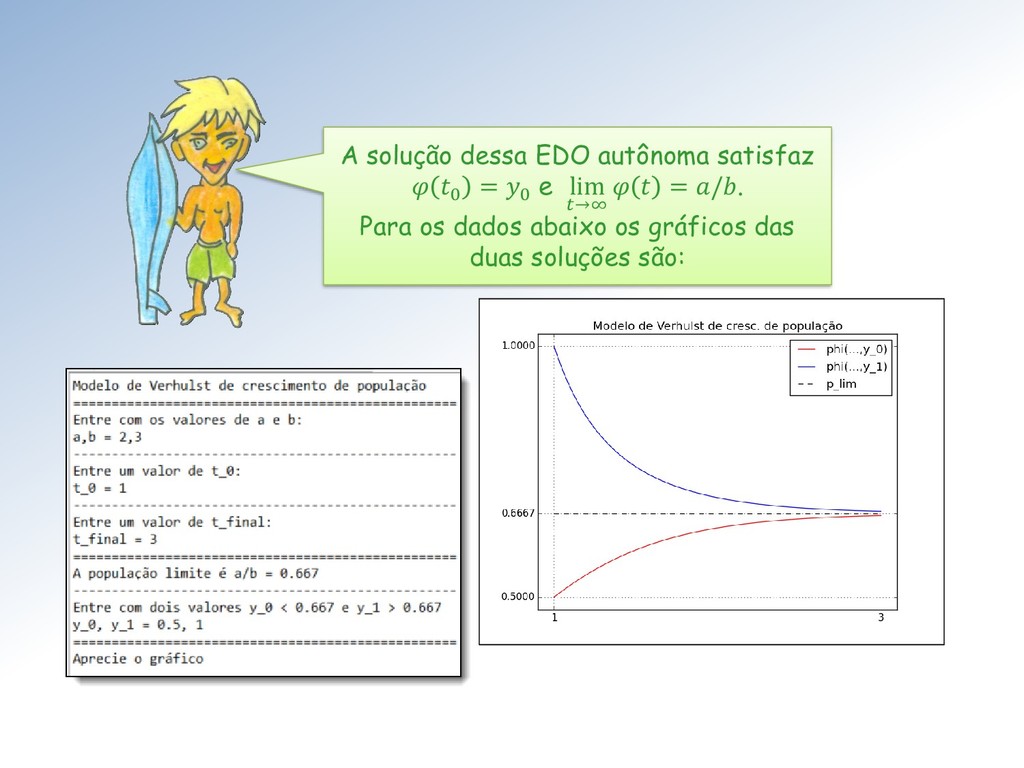
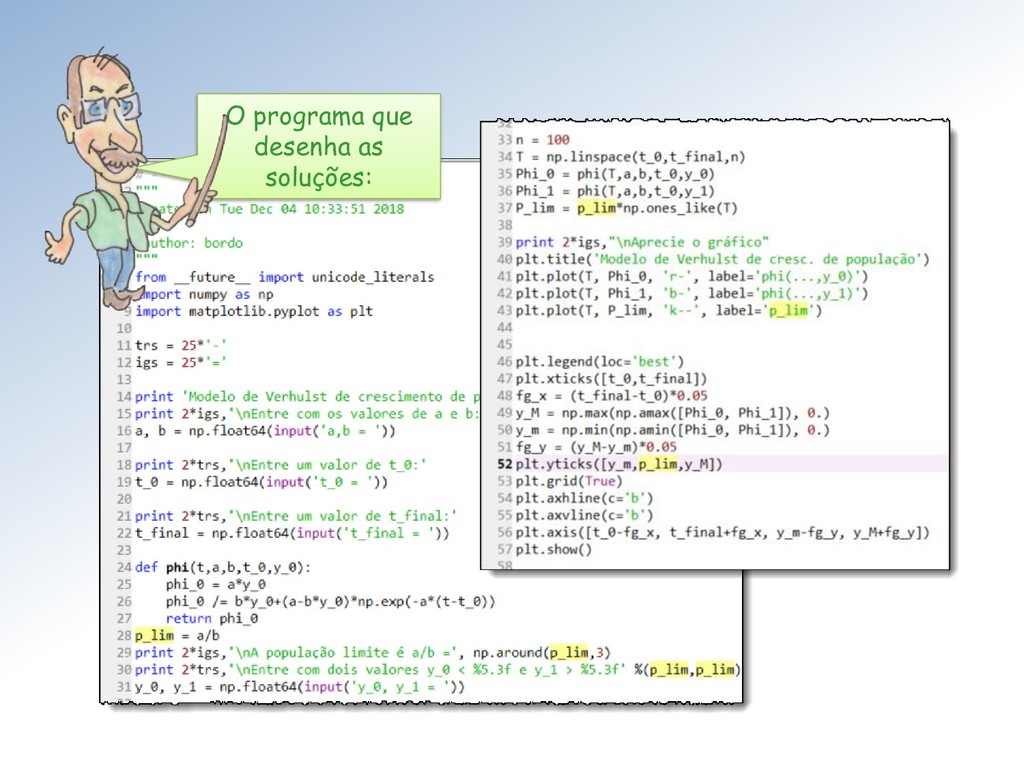
de Verhulst (∗) para crescimento de uma população: ′ = − , a, b > 0. Ela é não-linear. Trata-se de uma EDO separável cuja solução é = Τ 0 { 0 + − 0 − −0 } (∗) Veja pgs. 18-21, Eq. Dif. Aplicadas - D.G.Figueiredo & A.F. Neves, Coleção Matem. Universitária
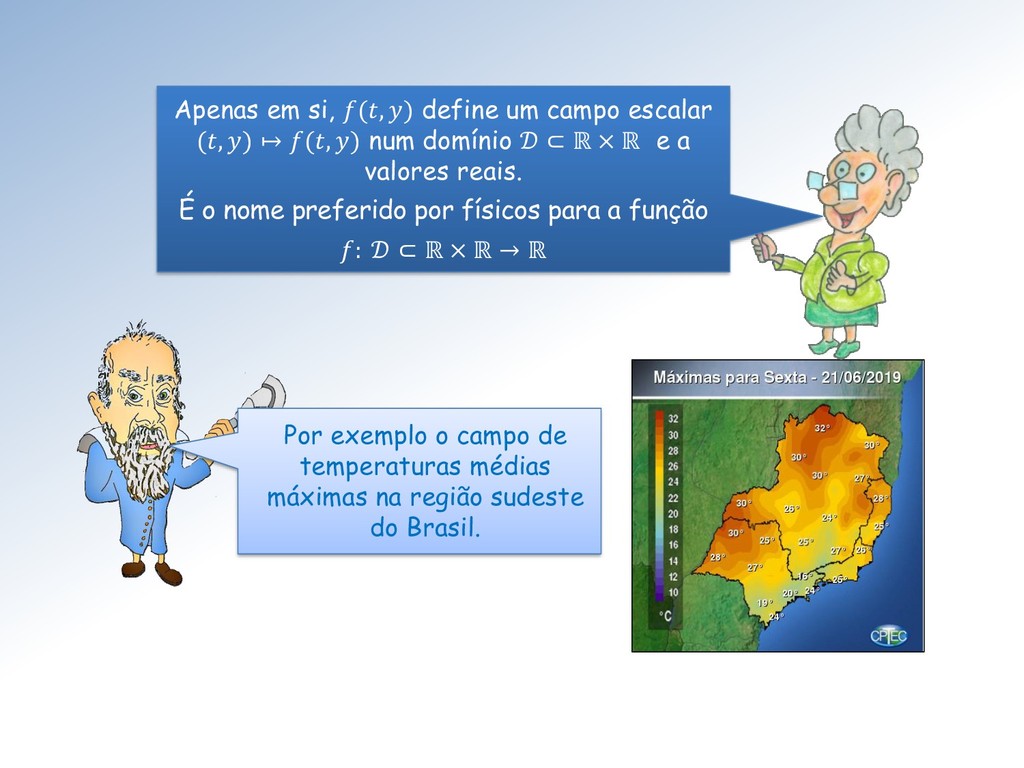
) ↦ (, ) num domínio ⊂ ℝ × ℝ e a valores reais. É o nome preferido por físicos para a função : ⊂ ℝ × ℝ → ℝ Por exemplo o campo de temperaturas médias máximas na região sudeste do Brasil.
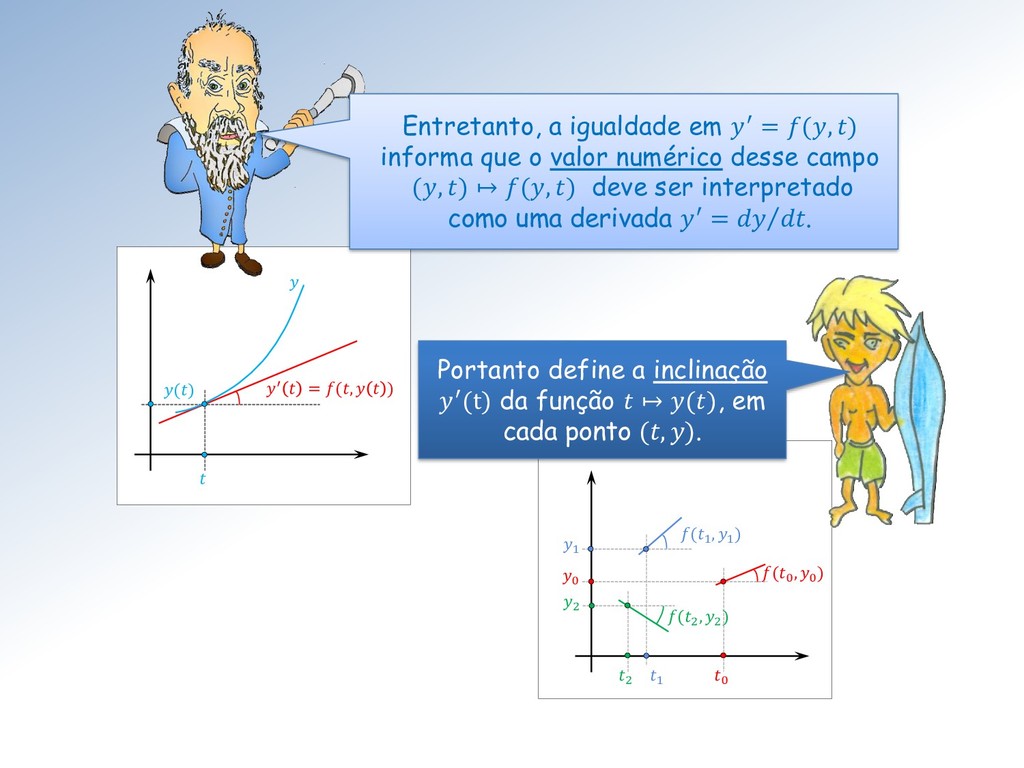
) 2 1 0 2 (0 , 0 ) (2 , 2 ) Portanto define a inclinação ′(t) da função ↦ (), em cada ponto (, ). Entretanto, a igualdade em ′ = (, ) informa que o valor numérico desse campo (, ) ↦ (, ) deve ser interpretado como uma derivada ′ = Τ .
(0 , 0 ) (2 , 2 ) Pois é Cabelos de Fogo, poderemos também pensar em um campo de vetores, se levarmos em consideração o sentido de percurso da curva ↦ ( , ). Repetindo a fala do Surfista, o campo (, ) ↦ (, ) é um campo escalar de inclinações definido em cada ponto (, ) ∈ ⊂ ℝ2.
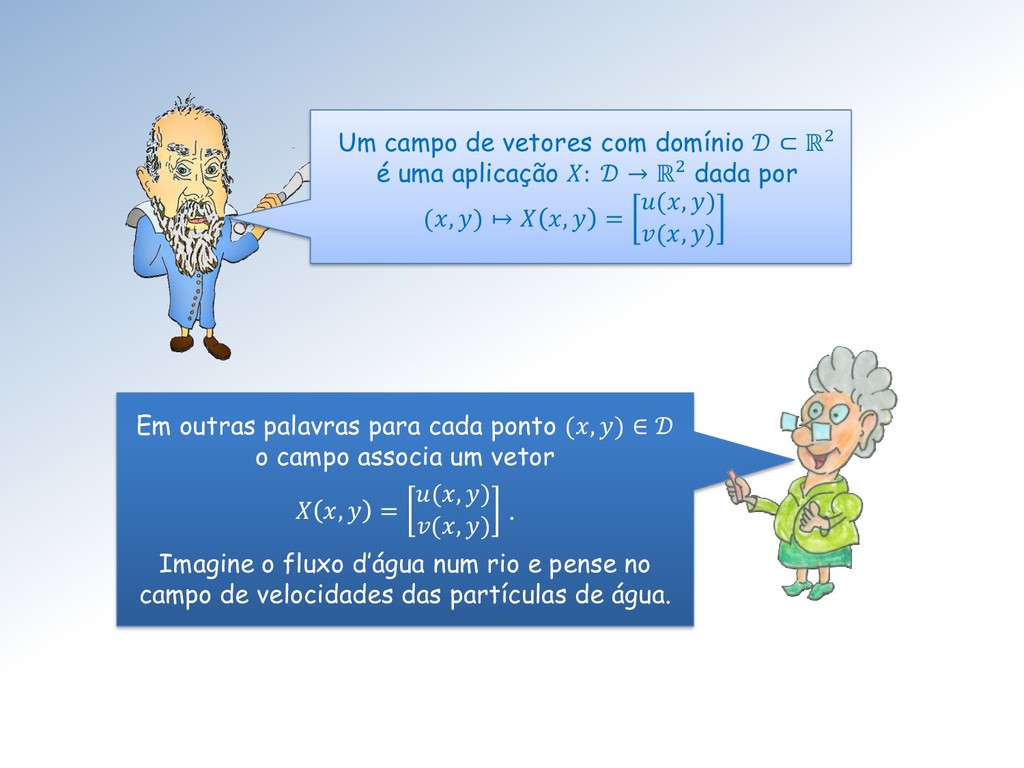
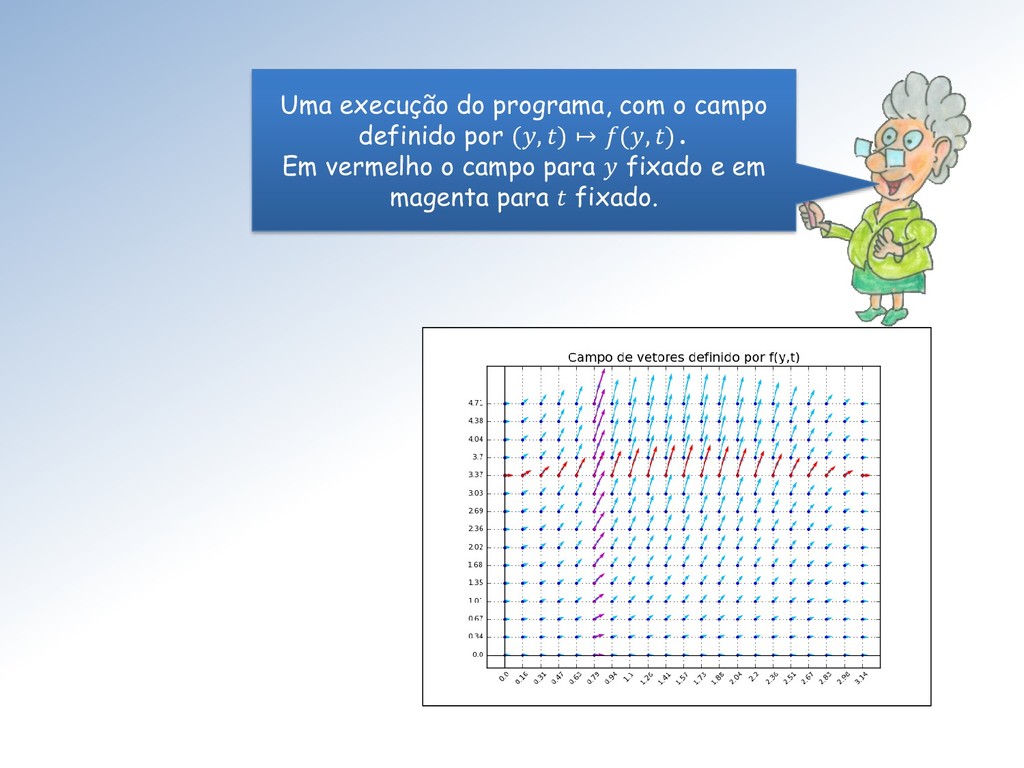
campo associa um vetor , = (, ) (, ) . Imagine o fluxo d’água num rio e pense no campo de velocidades das partículas de água. Um campo de vetores com domínio ⊂ ℝ2 é uma aplicação : → ℝ2 dada por (, ) ↦ , = (, ) (, )
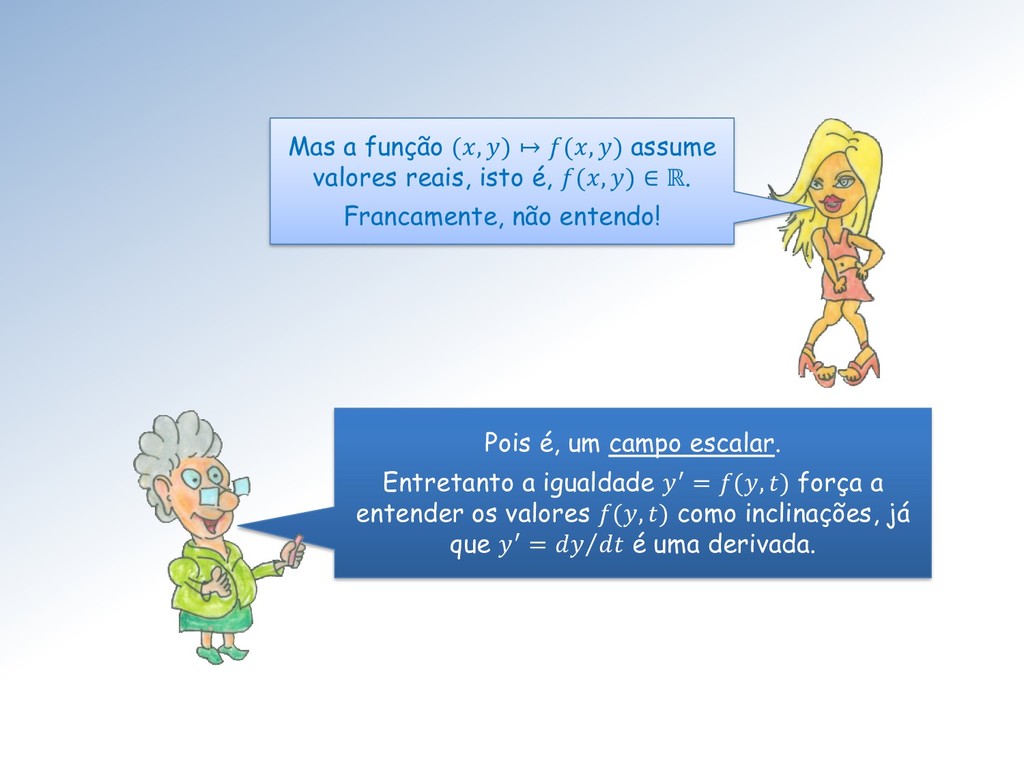
(, ) força a entender os valores (, ) como inclinações, já que ′ = Τ é uma derivada. Mas a função (, ) ↦ (, ) assume valores reais, isto é, (, ) ∈ ℝ. Francamente, não entendo!
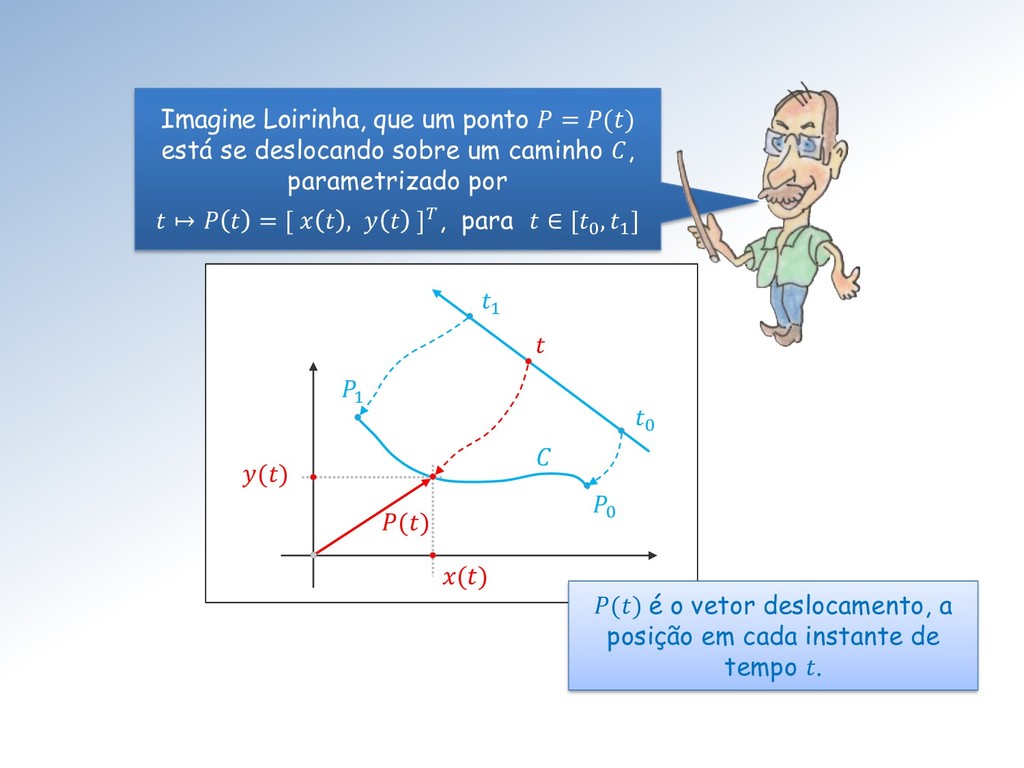
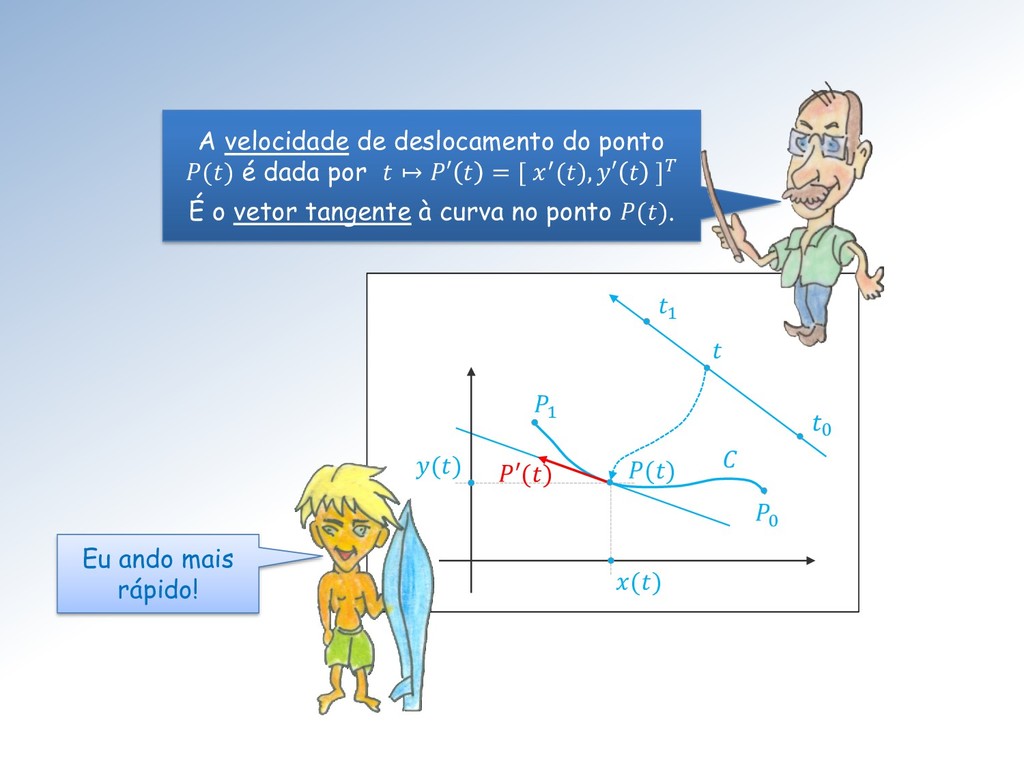
um ponto = () está se deslocando sobre um caminho , parametrizado por ↦ = [ , ], para ∈ [0 , 1 ] () é o vetor deslocamento, a posição em cada instante de tempo .
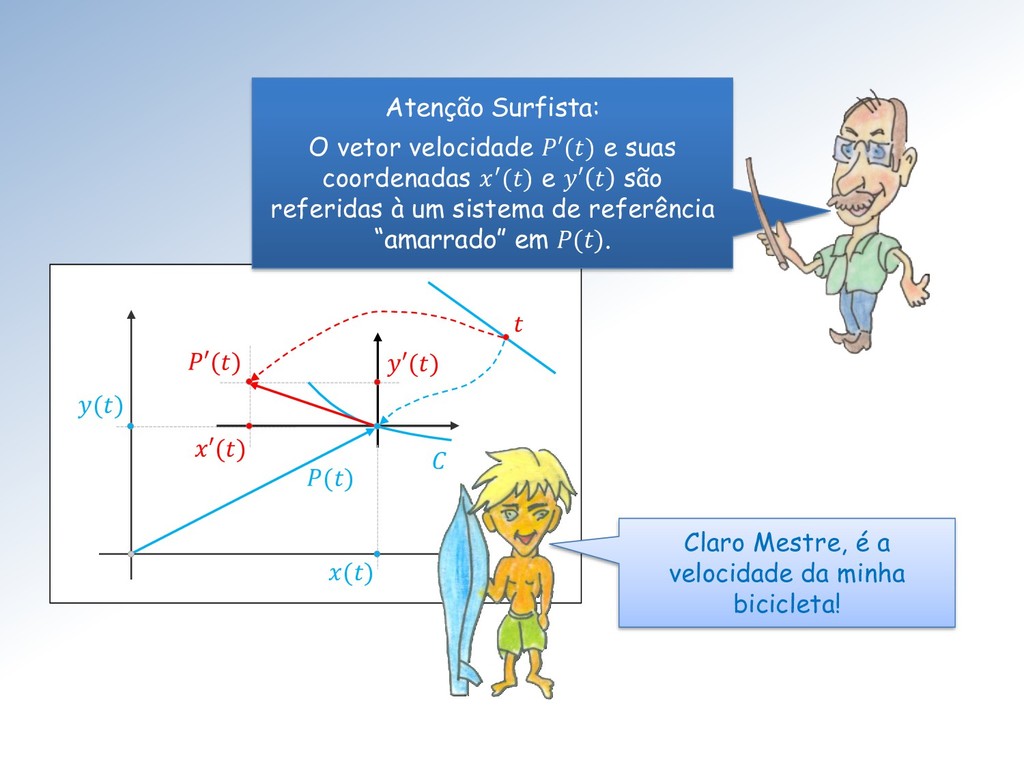
velocidade da minha bicicleta! Atenção Surfista: O vetor velocidade ′() e suas coordenadas ′() e ′ são referidas à um sistema de referência “amarrado” em ().
a incógnita é um número. Nem mesmo de um sistema de equações lineares (ou não-lineares), no qual a incógnita é um vetor. A incógnita é uma função ↦ e a expressão ′ = , relaciona e sua derivada ′ = Τ .
constituído por uma equação diferencial mais uma condição inicial: ቊ ′ = (, ) 0 = 0 . A pergunta que surge é: Todo problema de valor inicial, PVI, tem solução?
Doering e A.O. Lopes, Teorema de Cauchy- Peano, pg.387. Para que um PVI possua solução, basta que a função (, ) ↦ , seja contínua no seu domínio e que 0 , 0 ∈ .
preciso que a função seja Lispschitz contínua no seu domínio . Para maiores detalhes veja o Teorema de Picard-Lindelöf, às pgs. 384,385 da referência anterior.
algum teste mais simples? Tem sim Loirinha. Lendo, descobri no livro de Doering & Lopes que basta testarmos se e Τ (, ) são funções contínuas em (nas duas variáveis).
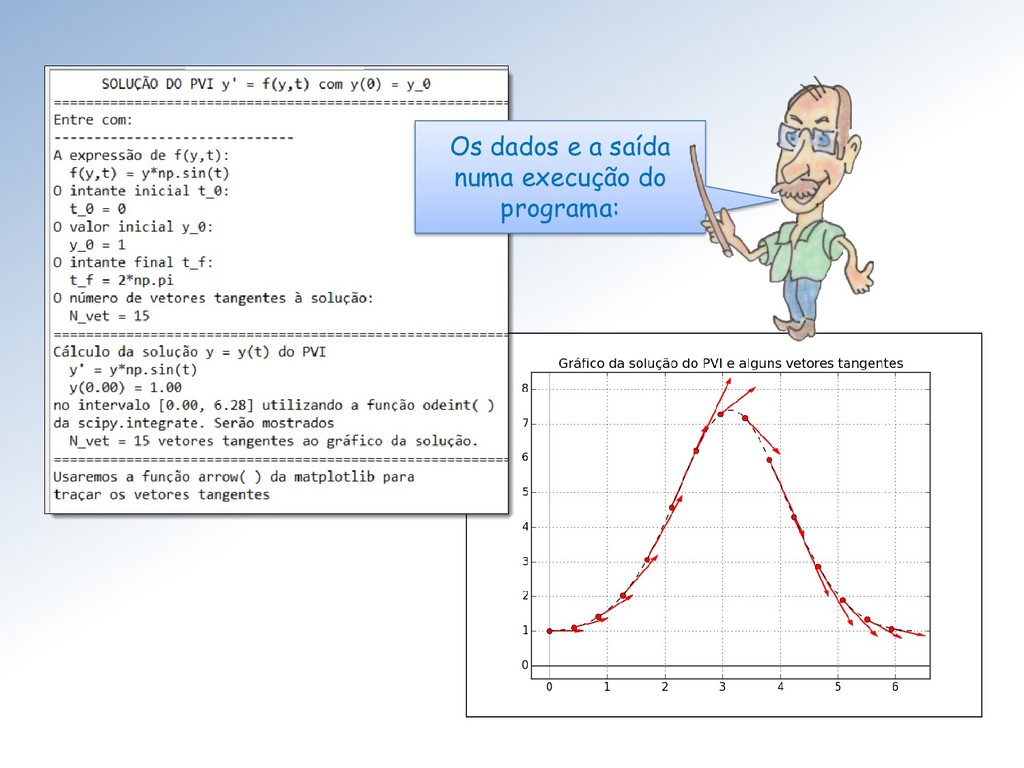
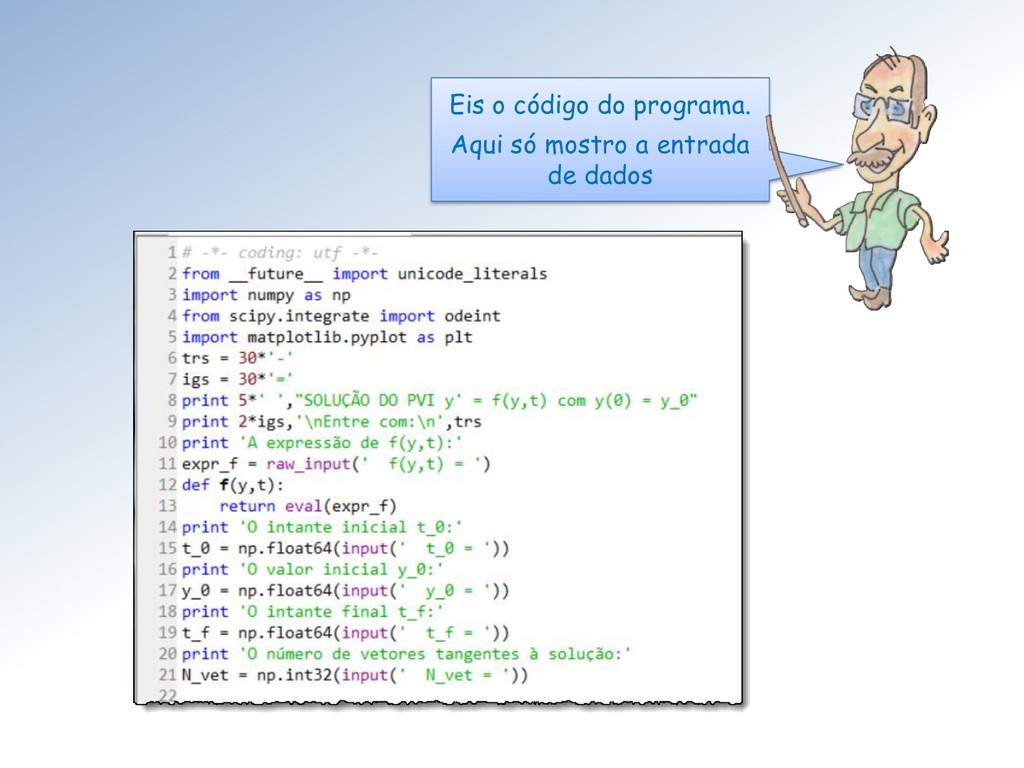
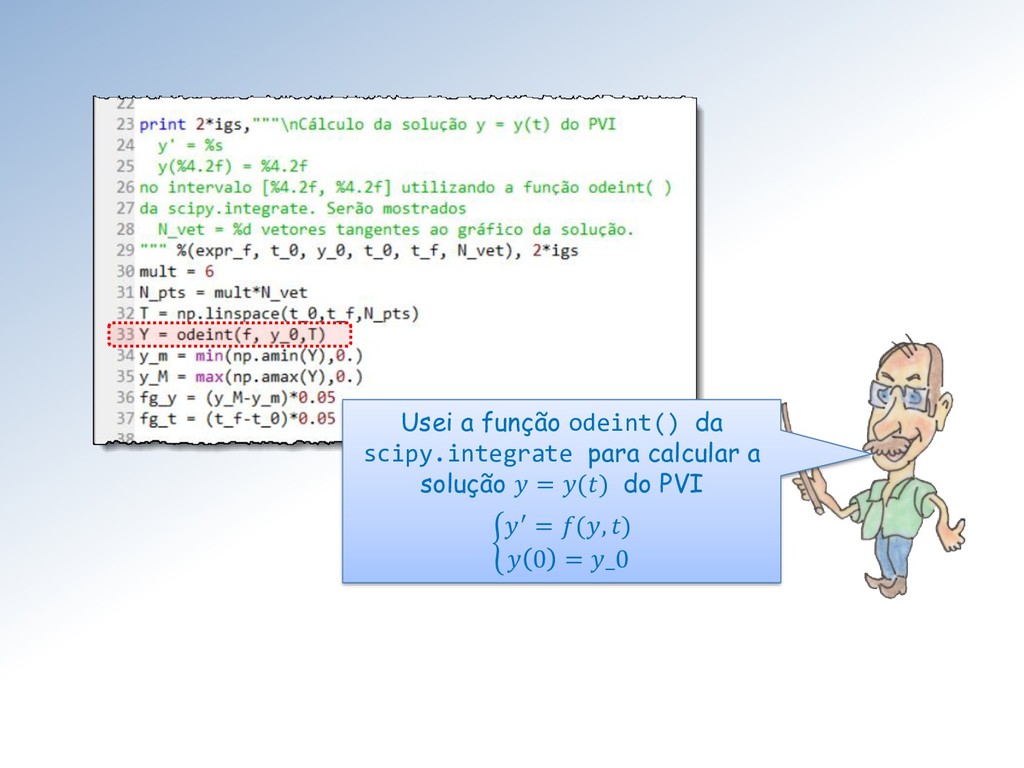
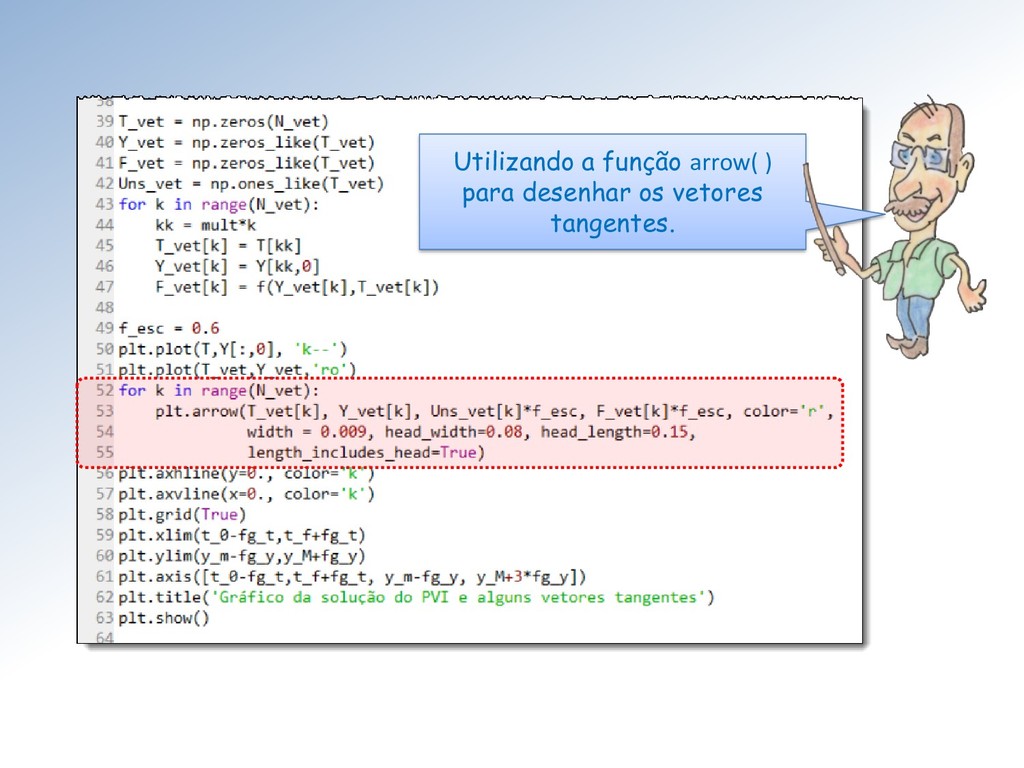
(, ) satisfazendo as condições de existência e unicidade, como obter, numericamente, a função ↦ (), que resolve o problema de valor inicial. Pois é querida, sua resposta ficará para a próxima aula.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![1 0 0 () 1 = [ , ] ′](https://files.speakerdeck.com/presentations/25f7c97aff4e4da8bc5980d66e3400ab/slide_45.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}