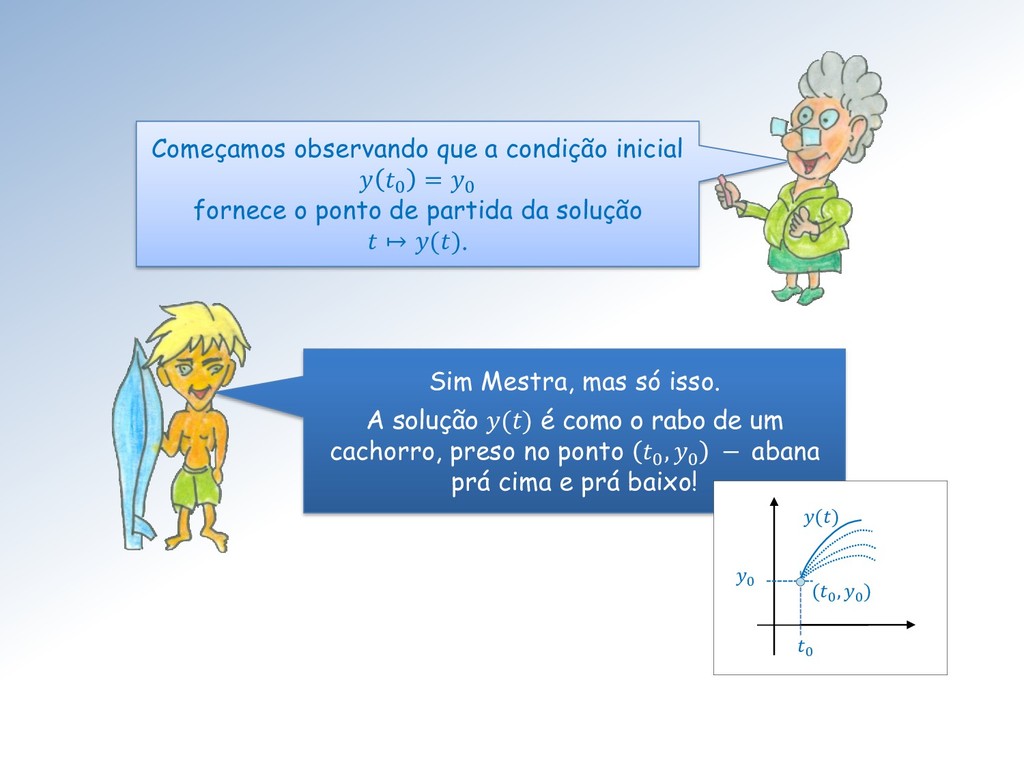
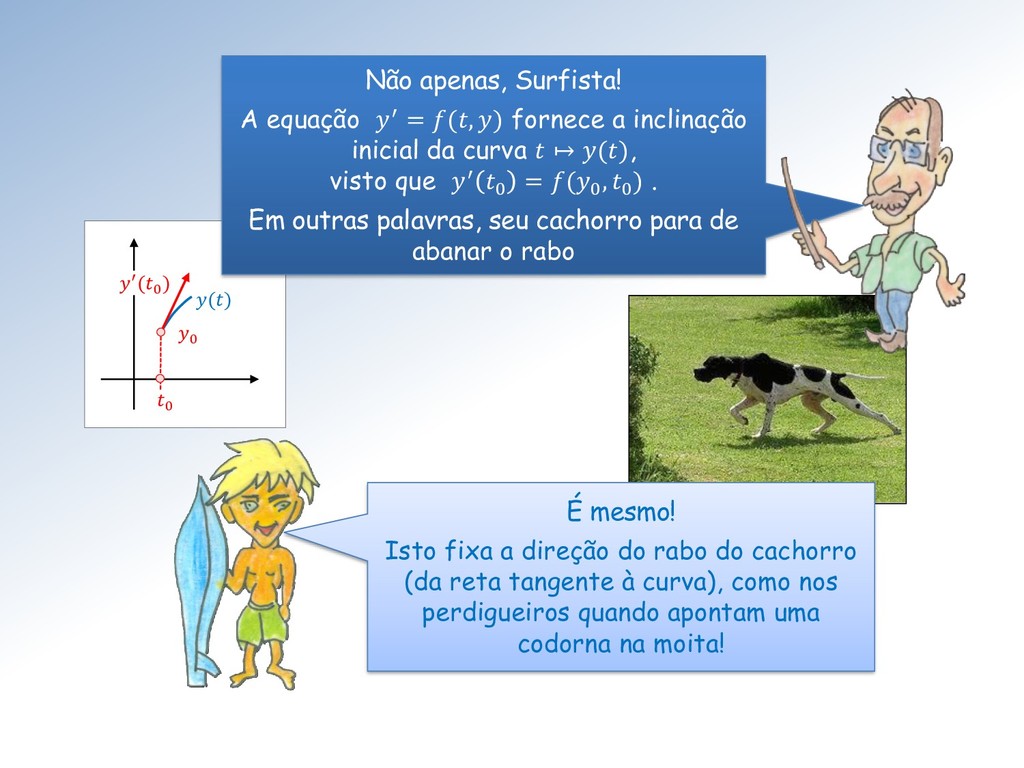
o ponto de partida da solução ↦ (). Sim Mestra, mas só isso. A solução () é como o rabo de um cachorro, preso no ponto 0 , 0 − abana prá cima e prá baixo! 0 0 () (0 , 0 )
direção do rabo do cachorro (da reta tangente à curva), como nos perdigueiros quando apontam uma codorna na moita! Não apenas, Surfista! A equação ′ = (, ) fornece a inclinação inicial da curva ↦ (), visto que ′ 0 = (0 , 0 ) . Em outras palavras, seu cachorro para de abanar o rabo
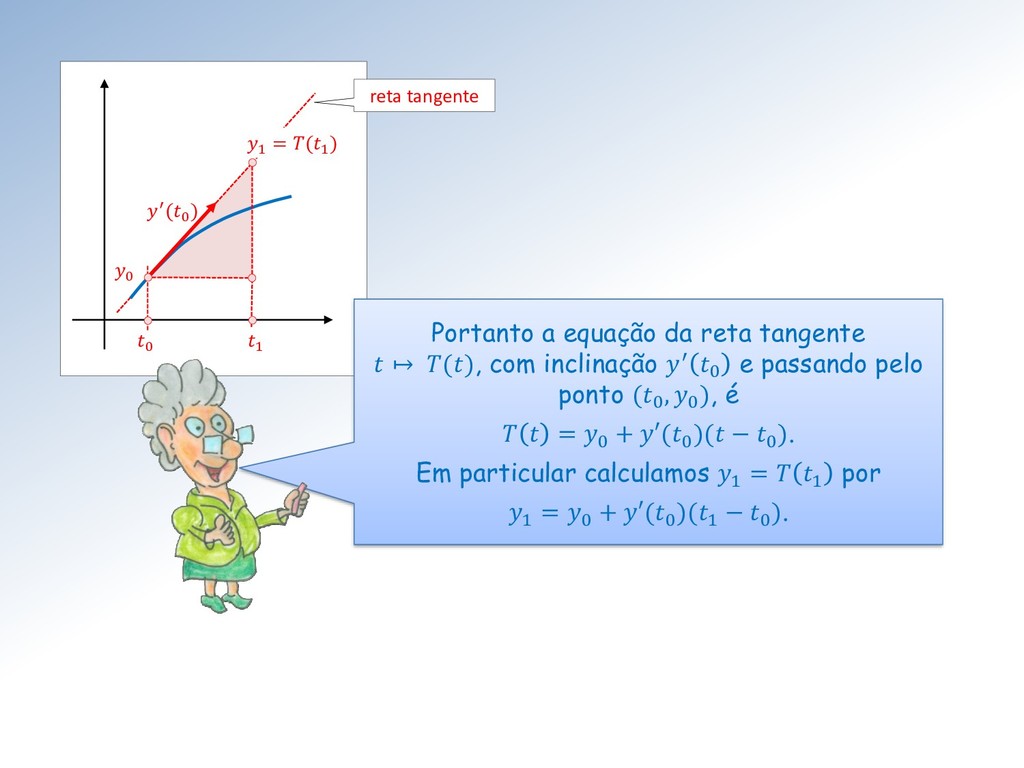
como a reta tangente ↦ () “cola” na curva pertinho do ponto de tangência poderemos aproximar 1 − na curva ↦ − pelo valor 1 = (1 ) Sim Cabelos de Fogo, mas estaremos usando a ideia de colar ao contrário. Agora é a curva que “cola” na reta tangente! Aproximação (1 )
calcular 1 = 0 + ′(0 )(1 − 0 ) e assim a aproximar a solução ↦ () do problema de valor inicial num ponto 1 = 0 + ℎ quando ℎ é bem pequeno. Basta colocar 1 ≅ 1 = 0 + ′(0 ) ∙ ℎ 1 ≅ 1 (1 )
Nem tanto Loirinha, comparando 1 com a série de Taylor da solução () para = 0 + ℎ, obtemos 0 + ℎ = 0 + ′ 0 ℎ + ′′ 0 ℎ2 2 + … d’onde concluímos que o erro nessa aproximação é ℴ(ℎ2).
que reta tangente e a curva “colam” uma na outra perto do ponto de tangência 0 , 0 . Isso mesmo Surfista. Para ℎ = 0.1 o erro é da ordem de 0.01, dez vezes menor.
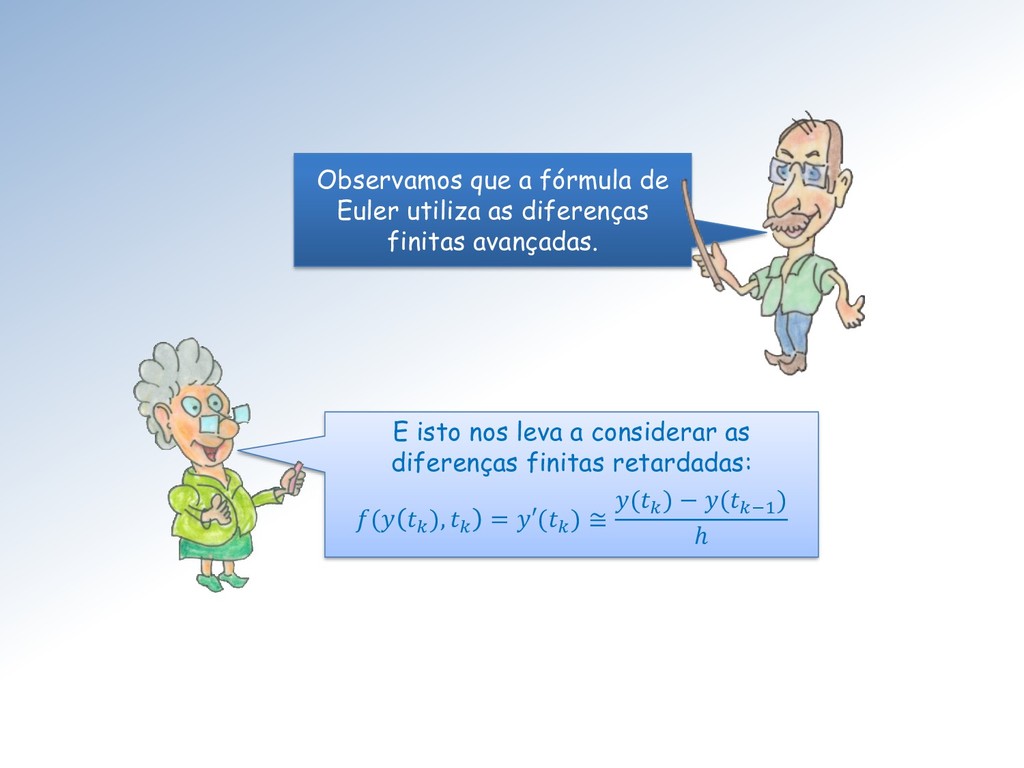
teremos o chamado método retardado (backward) de Euler ቊ +1 = + ℎ ∙ +1 , +1 , = 0,1, ⋯ , − 1 0 = (0 ) Note Surfista, que esse esquema não fornece uma fórmula explícita para calcular +1 . Para utilizá-la precisamos resolver uma equação para obter +1 em termos de e isto depende inteiramente da natureza da função (, ).
(), a equação a resolver é +1 = + ℎ ∙ +1 ∙ (+1 ) Ou +1 = 1 − ℎ( + ℎ) . Porém, para outras equações pode não ser tão simples explicitar +1 em termos de .
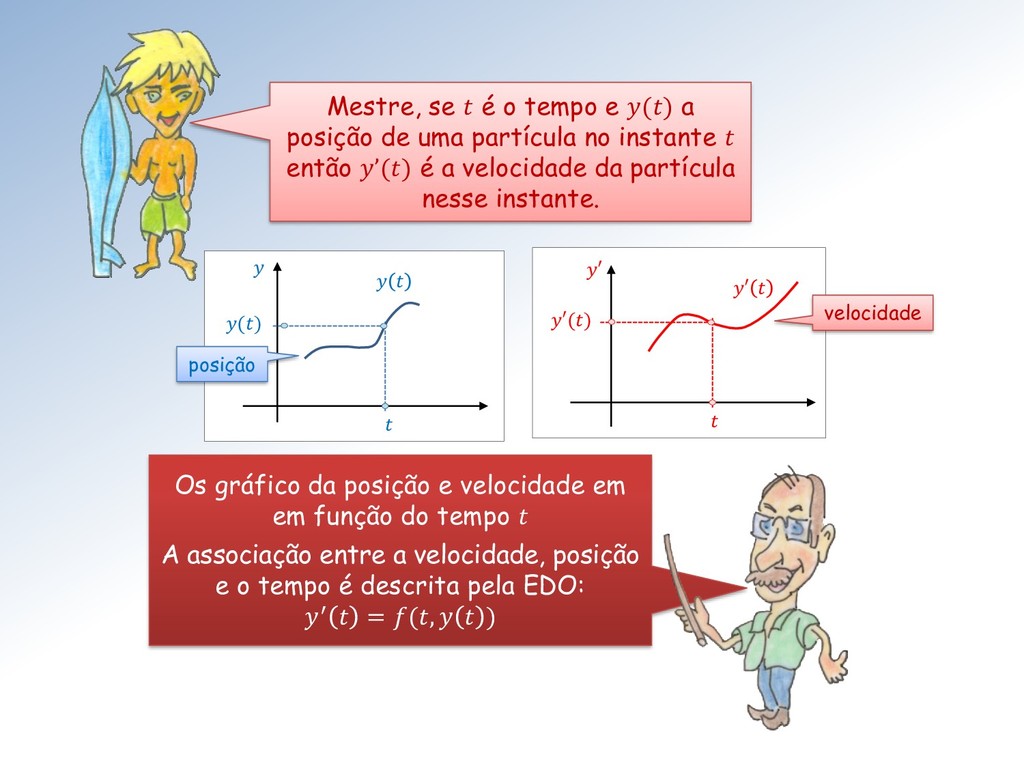
a posição de uma partícula no instante então ’() é a velocidade da partícula nesse instante. velocidade () Os gráfico da posição e velocidade em em função do tempo A associação entre a velocidade, posição e o tempo é descrita pela EDO: ′ = (, ) posição
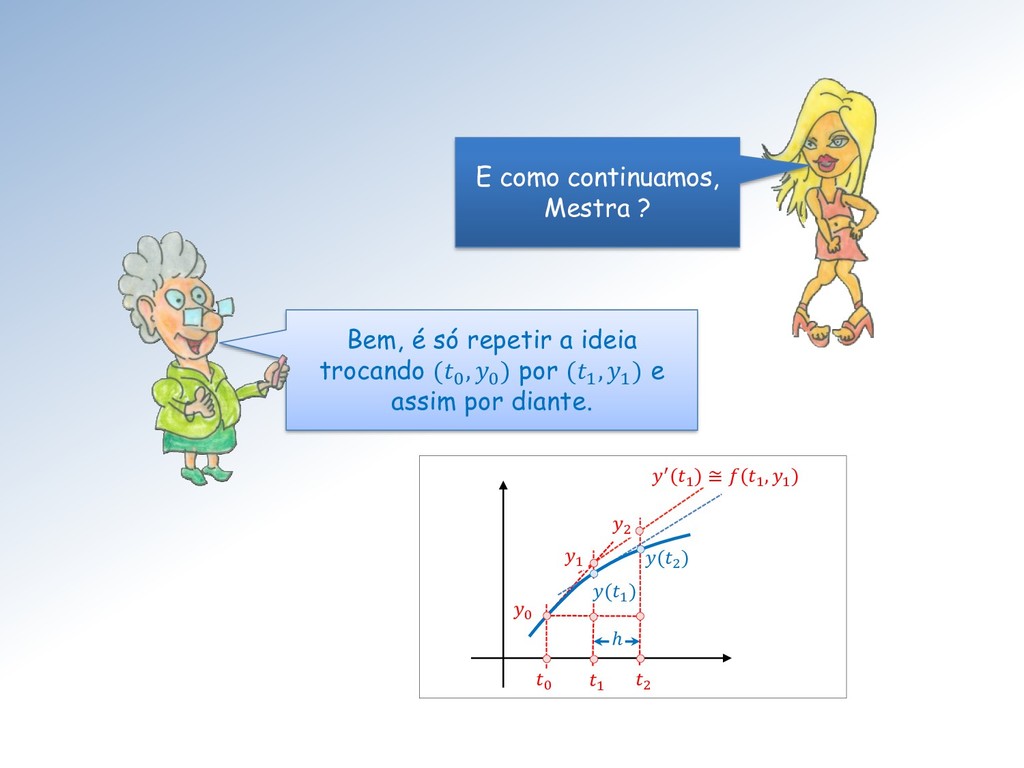
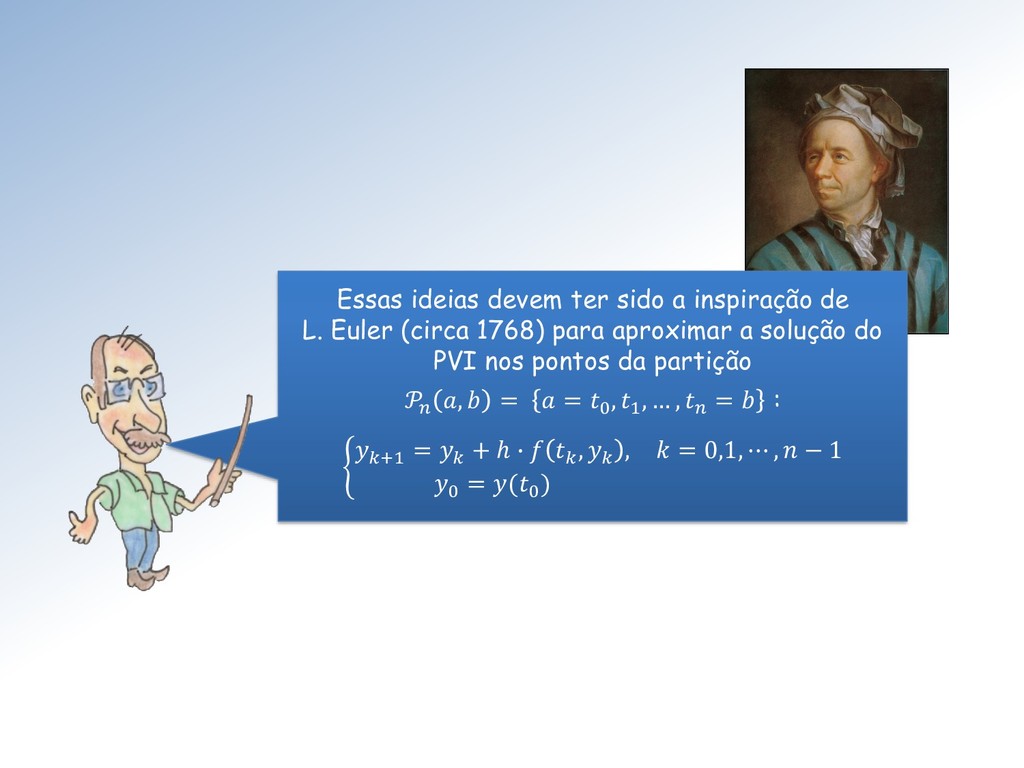
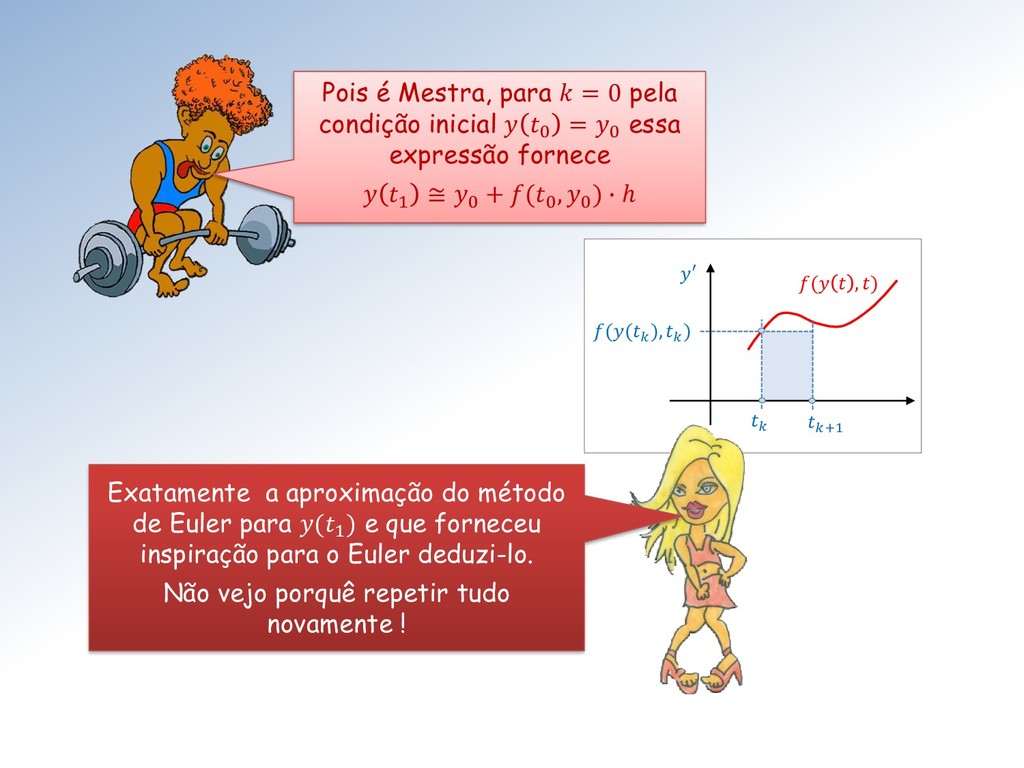
Mestra, para = 0 pela condição inicial 0 = 0 essa expressão fornece 1 ≅ 0 + (0 , 0 ) ∙ ℎ Exatamente a aproximação do método de Euler para (1 ) e que forneceu inspiração para o Euler deduzi-lo. Não vejo porquê repetir tudo novamente !
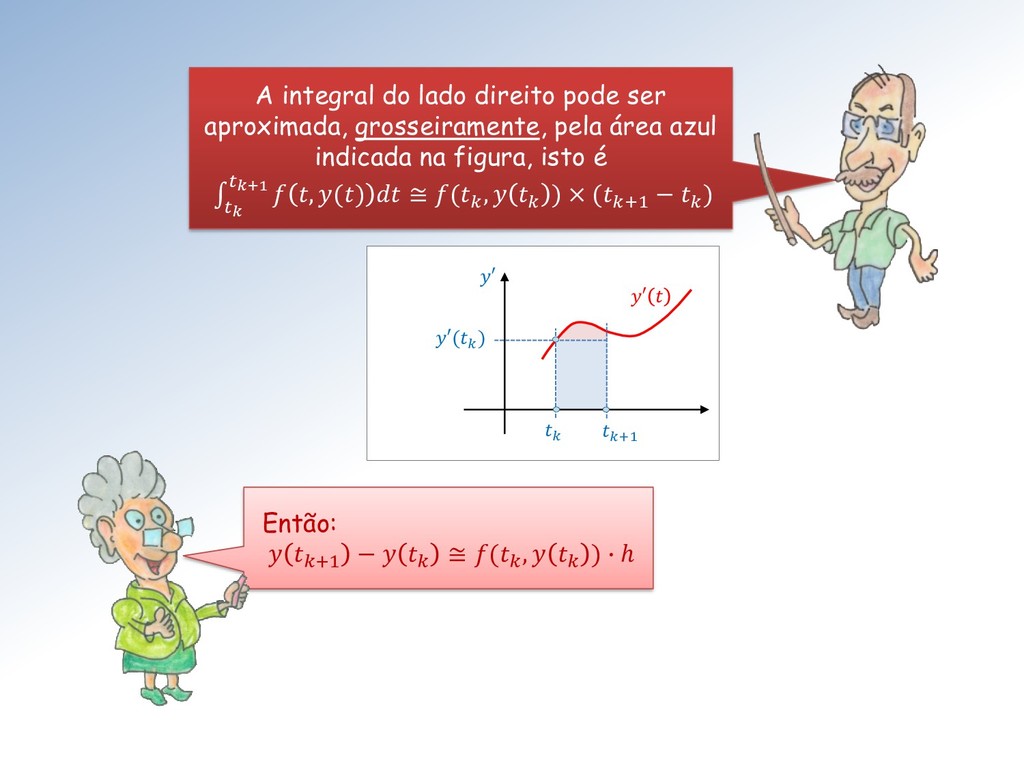
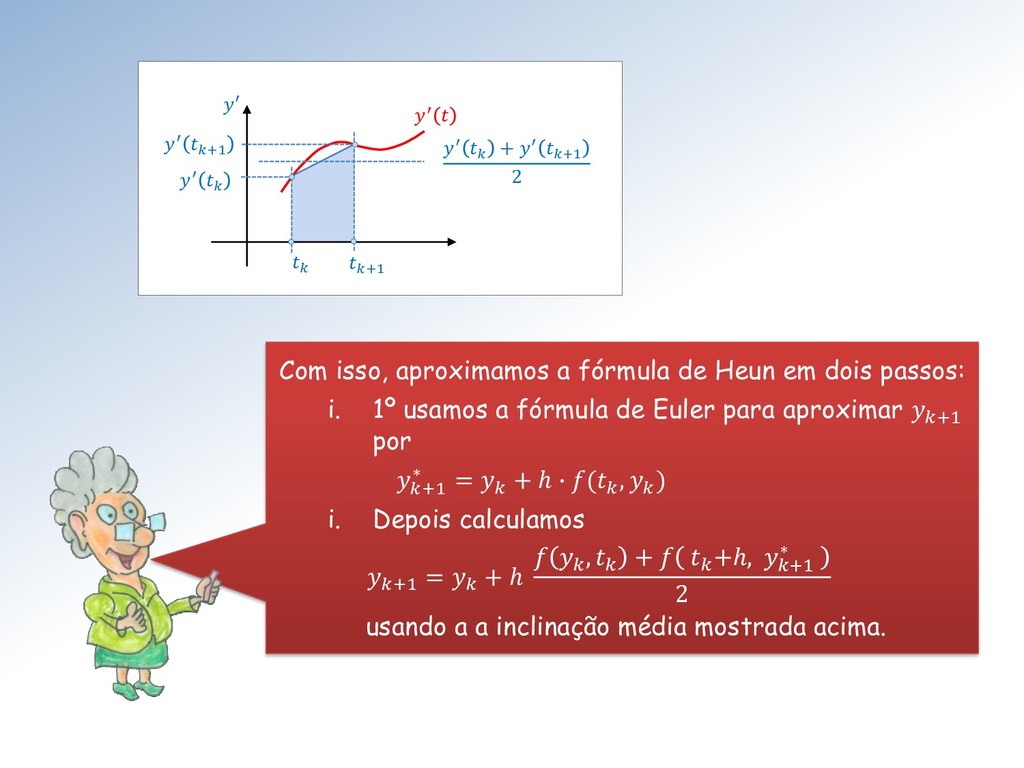
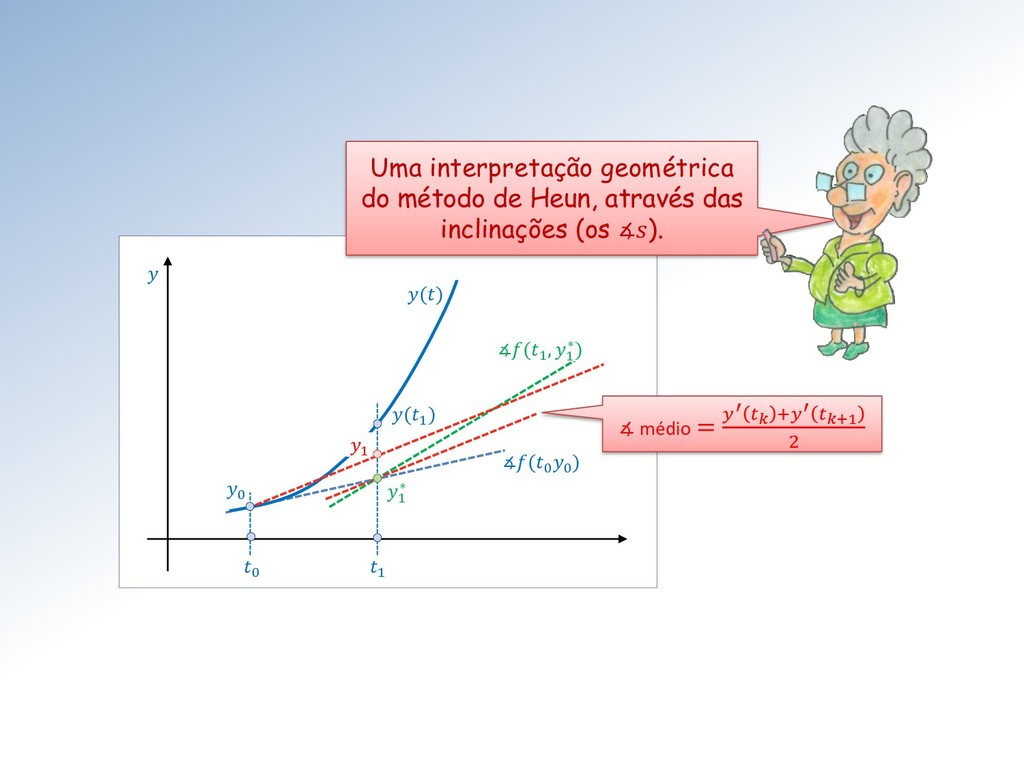
+1 , . Por exemplo pela área do trapézio azul: ( , ) +1 (( ), ) ((+1 ), +1 ) ′ Que fornecerá a fórmula aperfeiçoada de Euler, também conhecida como fórmula de Heun: +1 = + ℎ , + +1 , +1 2
por diferenças retardadas. Possivelmente equações difíceis de resolver! Sim, mas podemos aproximar o valor de +1 em +1 , +1 pela fórmula de Euler: +1 ∗ = + ℎ ∙ ( , )
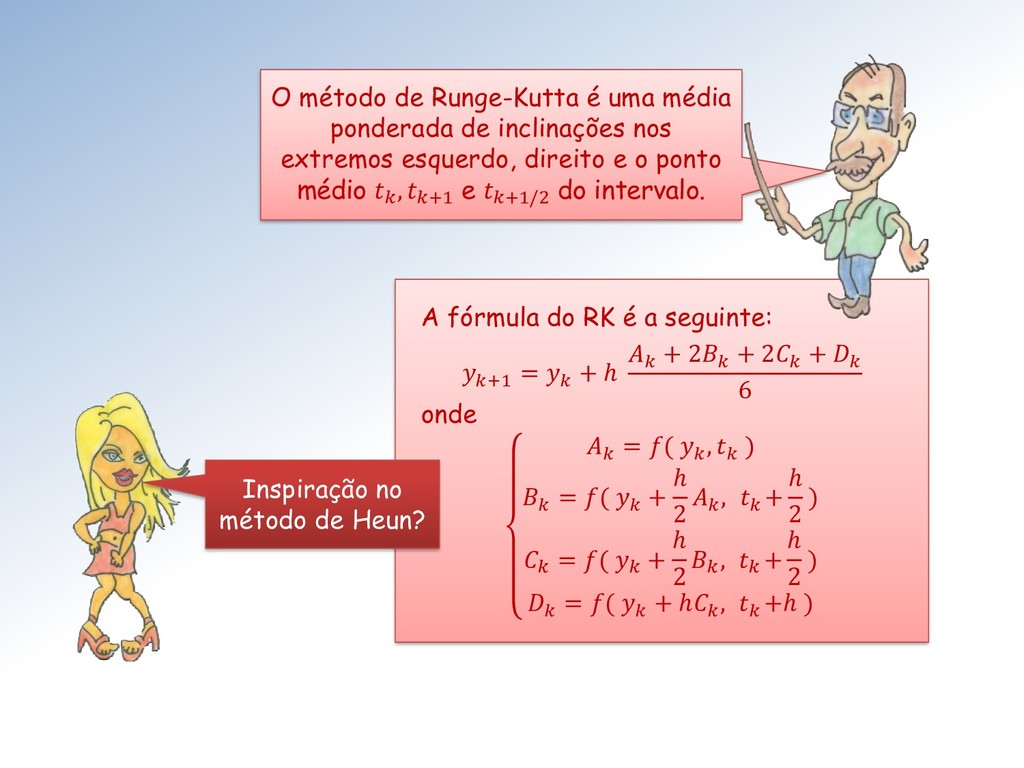
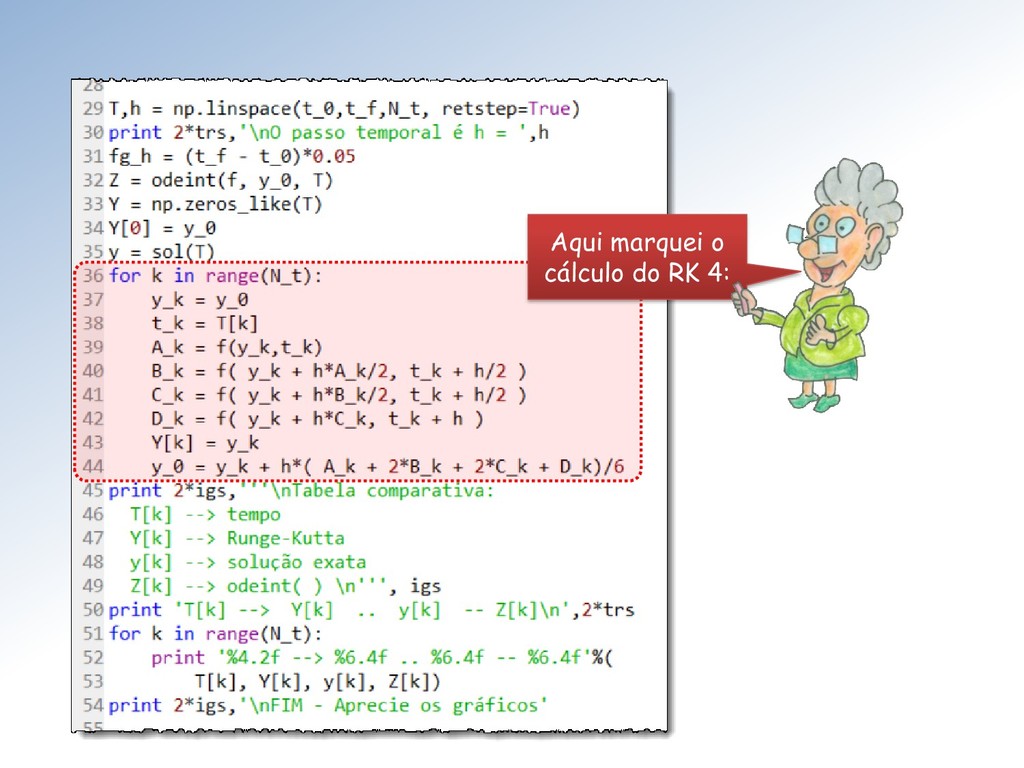
ℎ + 2 + 2 + 6 onde = ( , ) = ( + ℎ 2 , + ℎ 2 ) = ( + ℎ 2 , + ℎ 2 ) = ( + ℎ , +ℎ ) O método de Runge-Kutta é uma média ponderada de inclinações nos extremos esquerdo, direito e o ponto médio , +1 e +1/2 do intervalo. Inspiração no método de Heun?
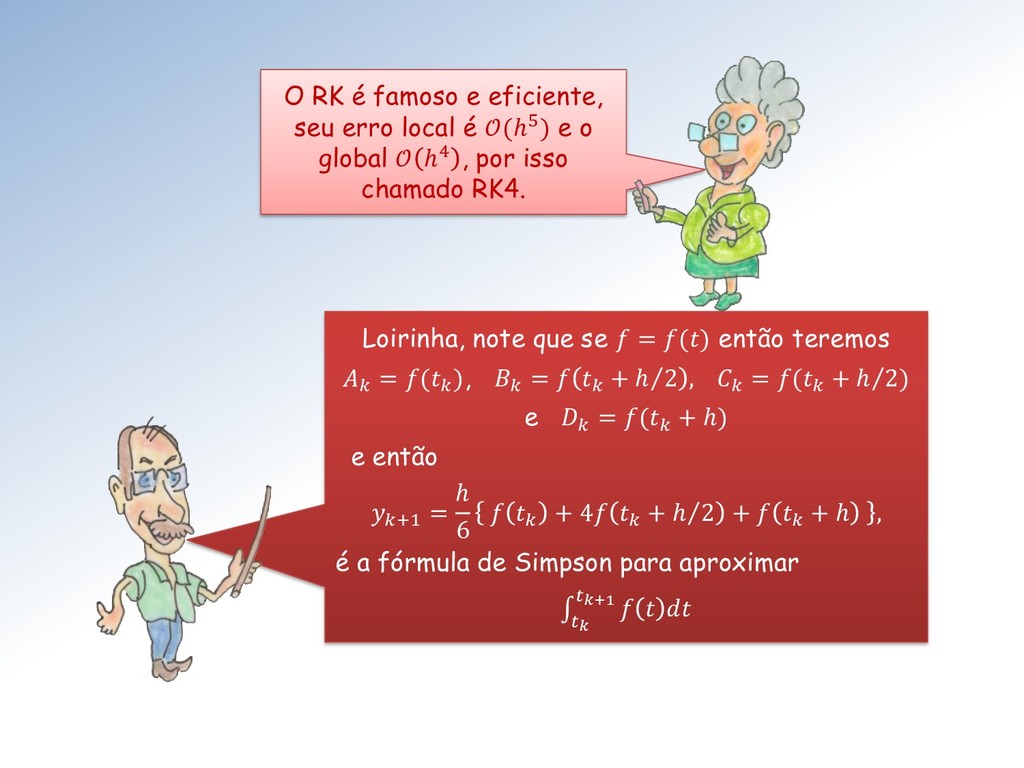
(ℎ5) e o global ℎ4 , por isso chamado RK4. Loirinha, note que se = () então teremos = ( ), = + Τ ℎ 2 , = ( + Τ ℎ 2) e = ( + ℎ) e então +1 = ℎ 6 + 4 + Τ ℎ 2 + + ℎ , é a fórmula de Simpson para aproximar +1
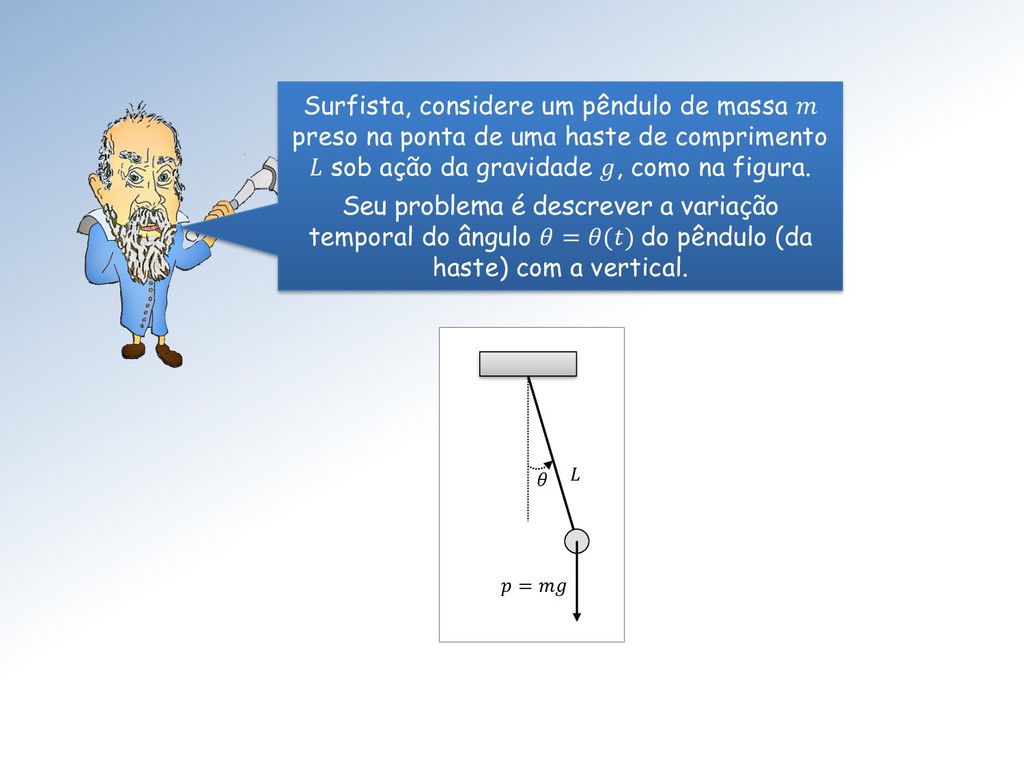
uma haste de comprimento sob ação da gravidade , como na figura. Seu problema é descrever a variação temporal do ângulo = () do pêndulo (da haste) com a vertical. =
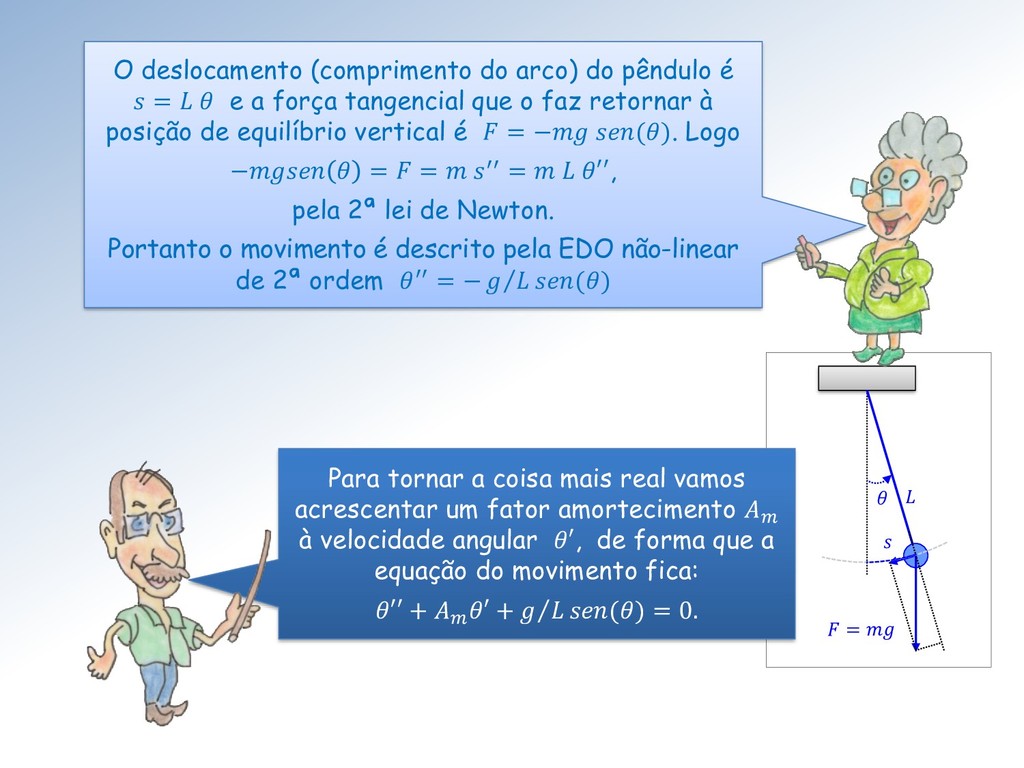
e a força tangencial que o faz retornar à posição de equilíbrio vertical é = − (). Logo − = = ′′ = ′′, pela 2ª lei de Newton. Portanto o movimento é descrito pela EDO não-linear de 2ª ordem ′′ = − Τ () Para tornar a coisa mais real vamos acrescentar um fator amortecimento à velocidade angular ′, de forma que a equação do movimento fica: ′′ + ′ + Τ () = 0.
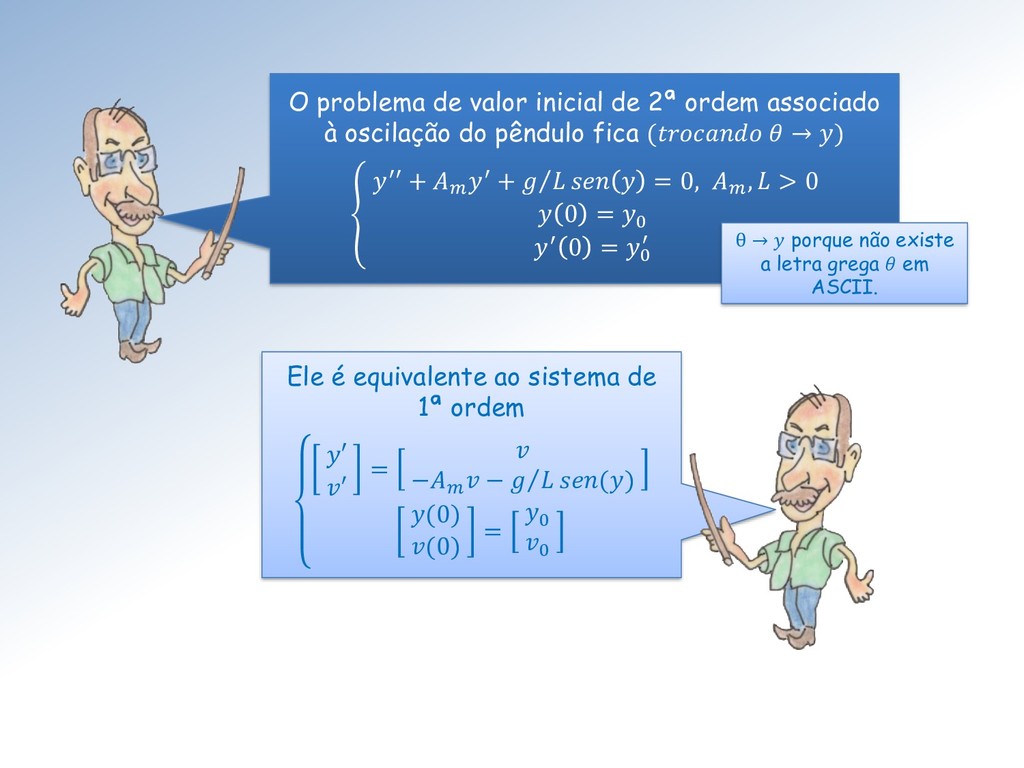
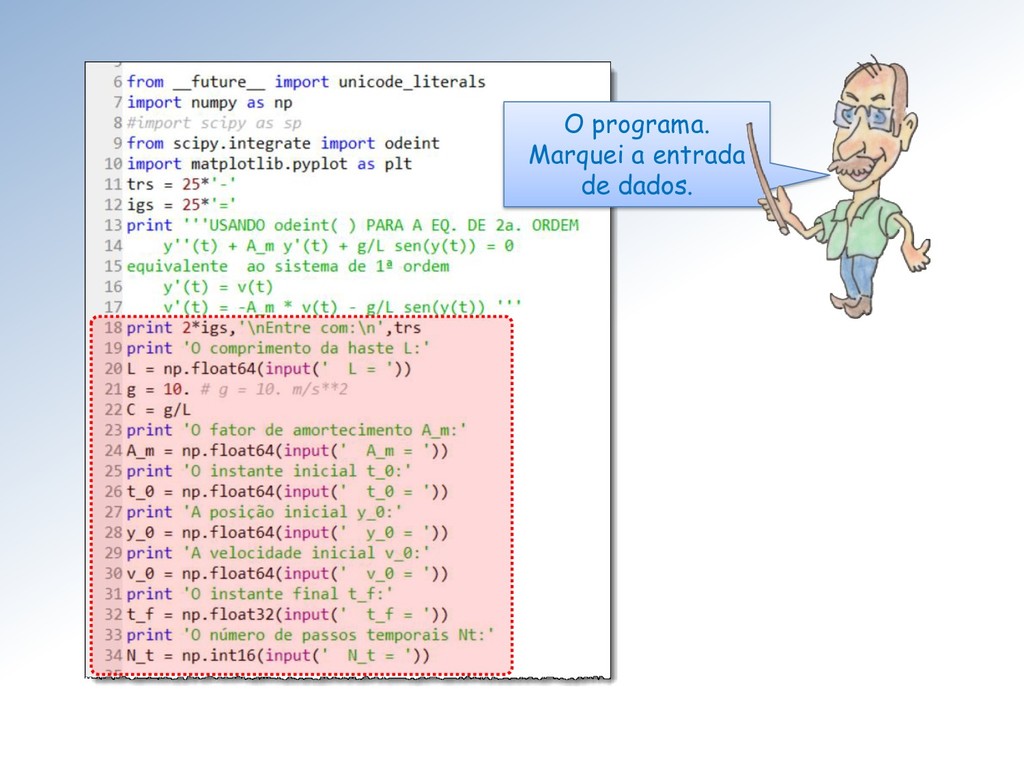
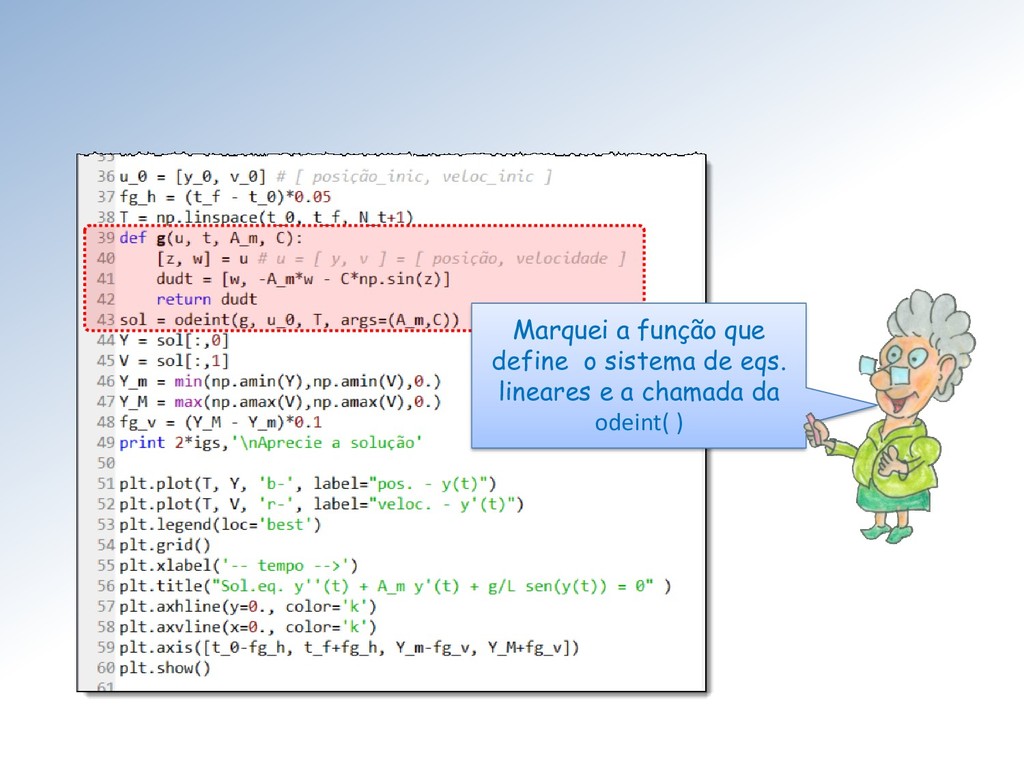
oscilação do pêndulo fica ( → ) ൞ ′′ + ′ + Τ = 0, , > 0 0 = 0 ′ 0 = 0 ′ θ → porque não existe a letra grega em ASCII. Ele é equivalente ao sistema de 1ª ordem ′ ′ = − − Τ () (0) (0) = 0 0
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}