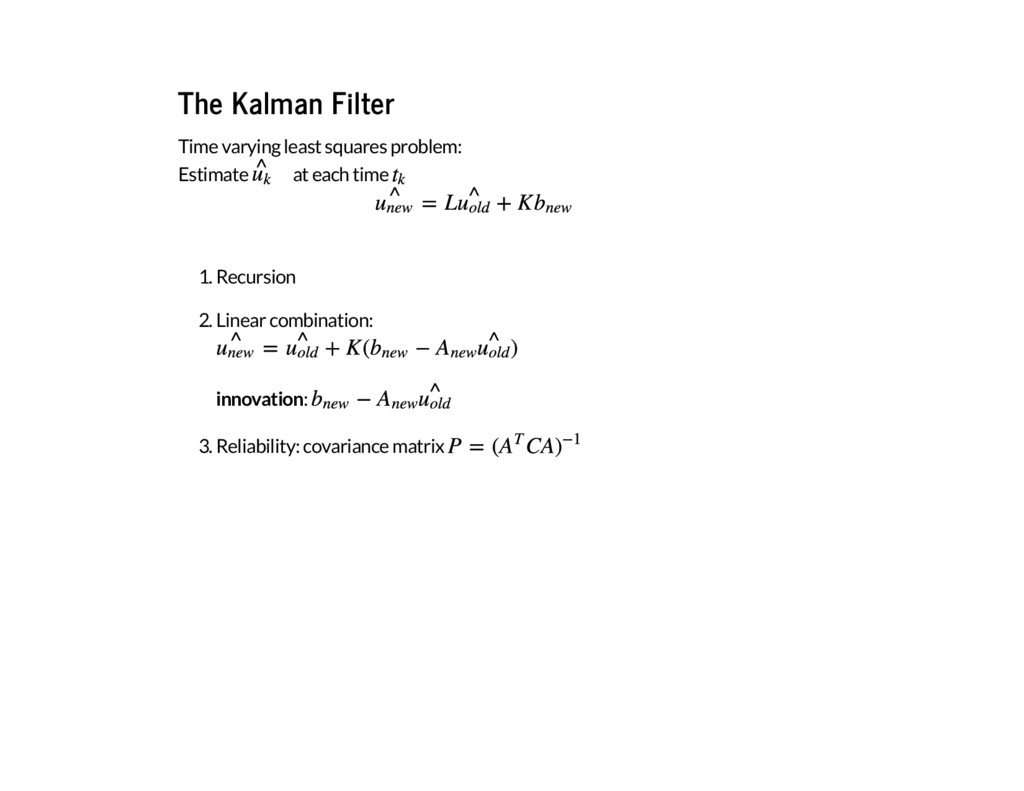
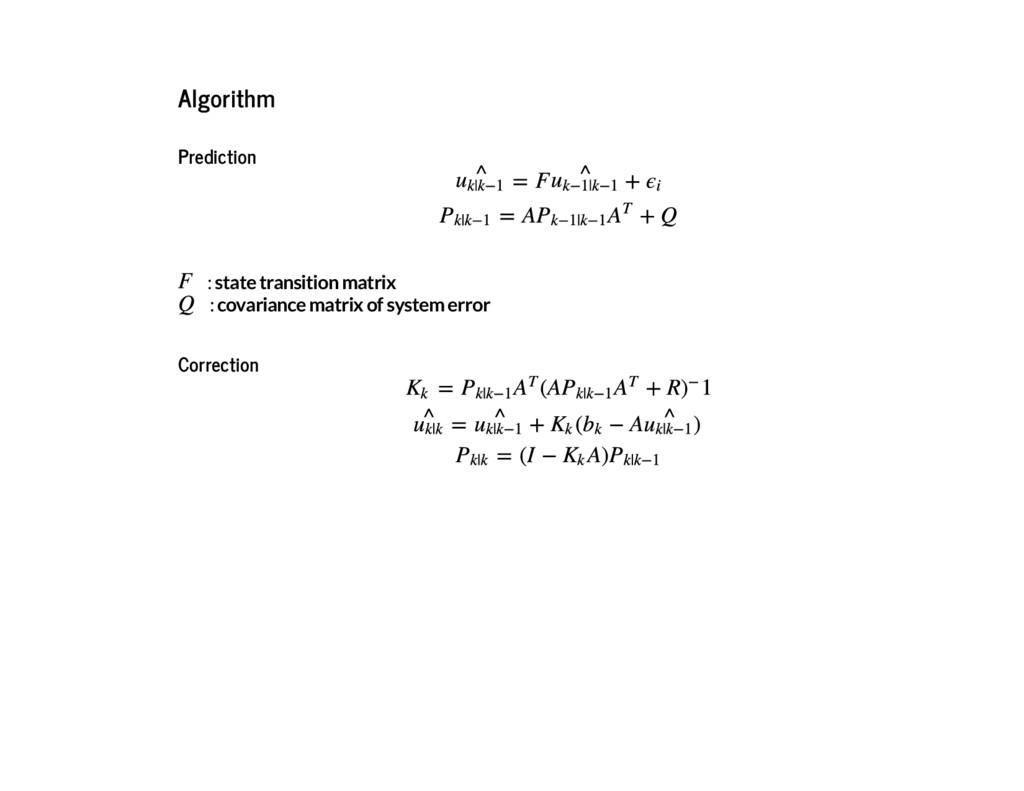
Kalman Filters have been widely used for scientific applications. No wonder people often think they involve complex math, however you can actually introduce the Kalman Filter in your daily data processing work, without the complex math you would imagine. This talk will show how to implement the discrete Kalman Filter in Python using NumPy and SciPy.
https://us.pycon.org/2016/schedule/presentation/2186/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![In [29]: def predict(u, P, F, Q): u = numpy.dot(F,](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_16.jpg){kind=link}
{kind=link}
![In [30]: def correct(u, A, b, P, Q, R): C](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_18.jpg){kind=link}
![In [124]: dt = 0.1 A = numpy.array([[1, 0], [0,](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_19.jpg){kind=link}
![In [125]: N = 100 predictions, corrections, measurements = [],](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_20.jpg){kind=link}
![In [126]: t = numpy.arange(50, 100) fig = plt.figure(figsize=(15,15)) axes](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_21.jpg){kind=link}
{kind=link}
![Thank you! [email protected] @eramirem](https://files.speakerdeck.com/presentations/8a31aa683bad417cb3547a96f13608b3/slide_23.jpg){kind=link}