My DAMTP BioLunch talk on 7 June 2018.
Link to Movies:
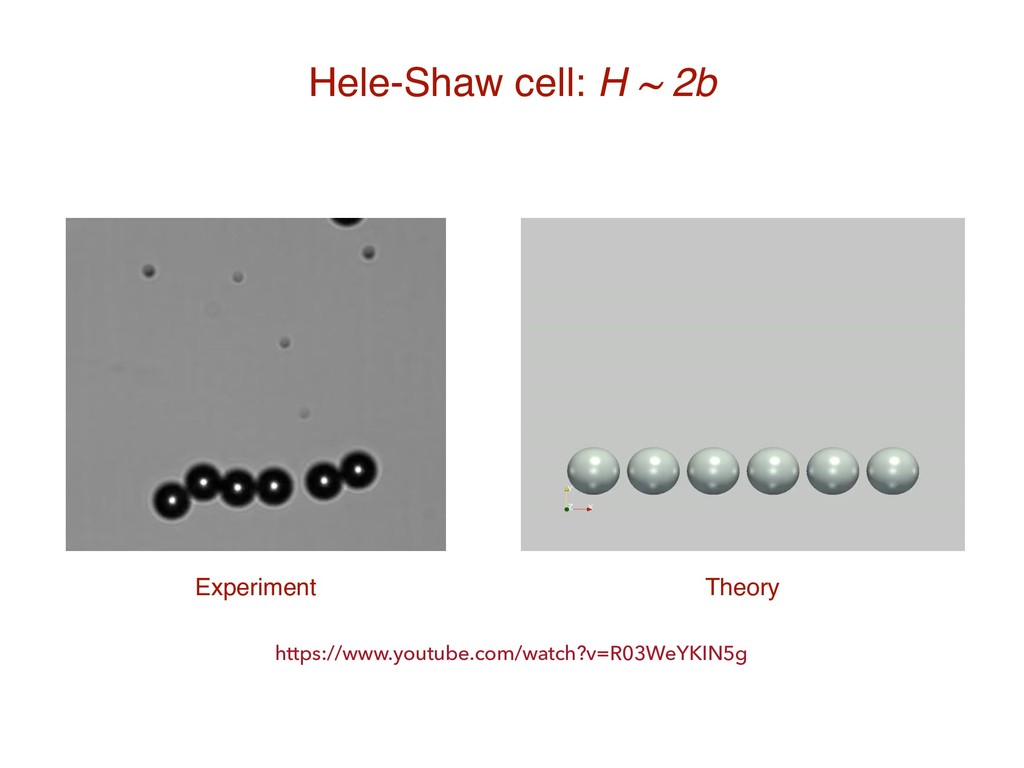
1. Slide-71 https://www.youtube.com/watch?v=R03WeYKIN5g
2. Slide-74 https://www.youtube.com/watch?v=Dq-SpTjvyNI
3. Slide-78 https://www.youtube.com/watch?v=FsiELGK15Y4
4. Slide-84 https://www.youtube.com/watch?v=LpAILGwD_JE
5. Slide-89 https://www.youtube.com/watch?v=2jUId3KUvNk
Abstract:
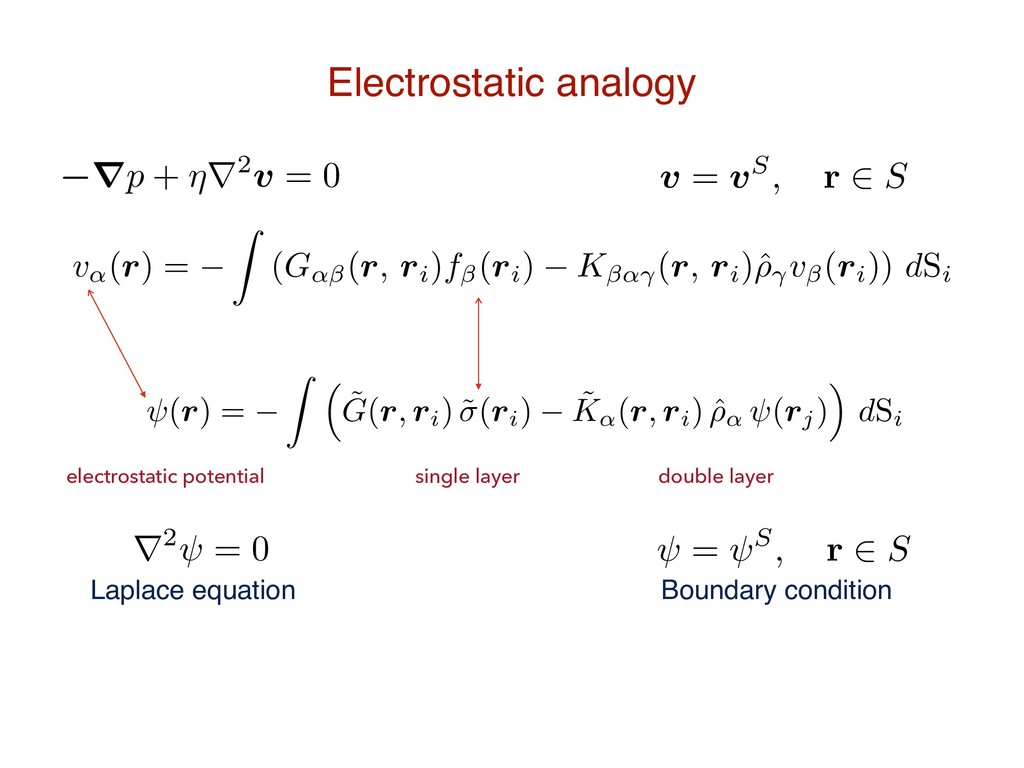
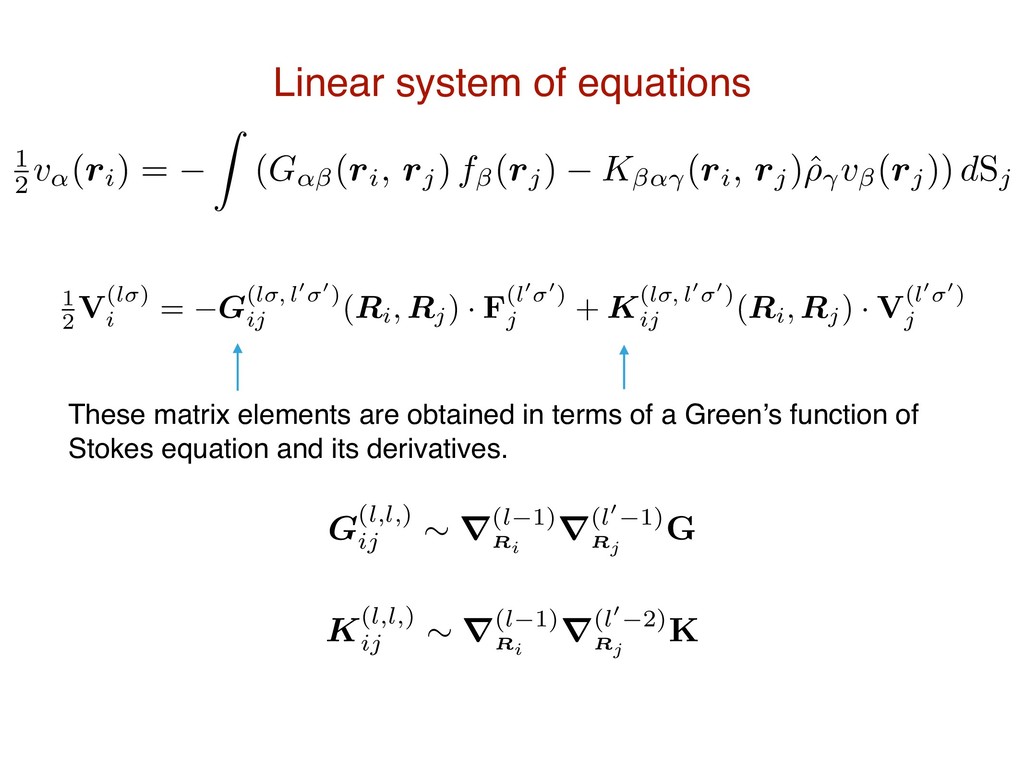
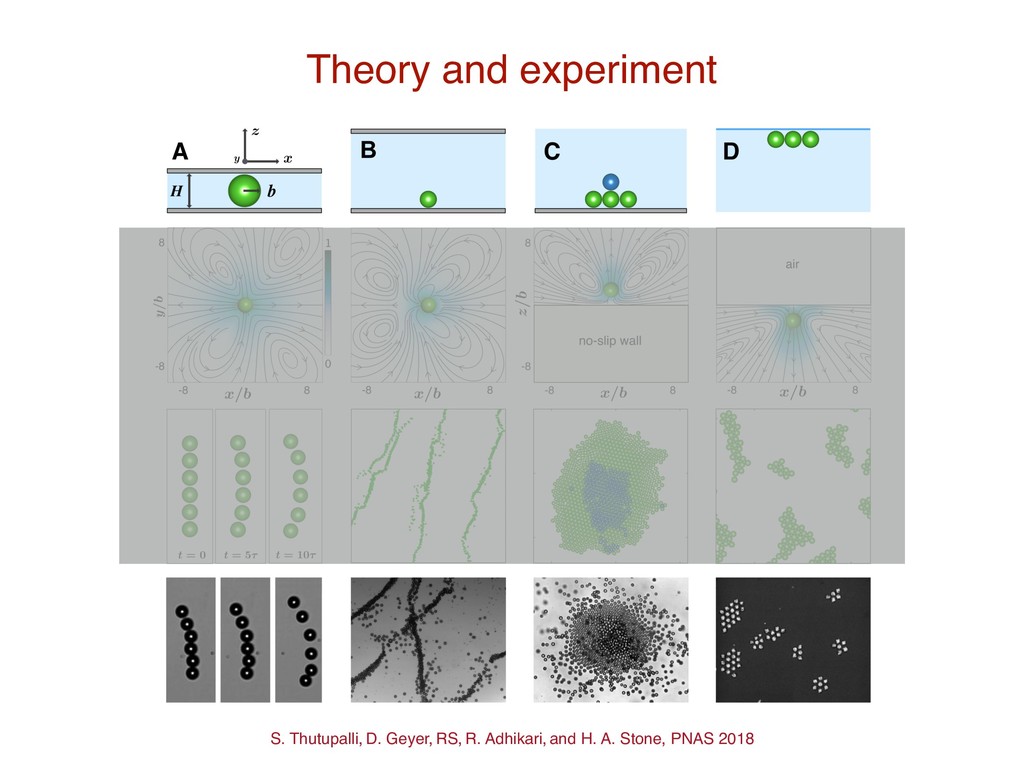
Active colloids - microorganisms, synthetic microswimmers, and self-propelling droplets - are known to self-organize into ordered structures at fluid-solid boundaries. Their mutual entrainment in the attractive component of the flow has been postulated as a possible mechanism underlying this phenomenon. In this talk, we describe this fluid-induced phase separation by combining experiments, theory, and numerical simulations, and demonstrate its control by changing the hydrodynamic boundary conditions. We show that, for flow in Hele-Shaw cells, metastable lines or stable traveling bands of colloids can be obtained by varying the cell height, while for flow bounded by a plane, dynamic crystallites are formed. At a plane no-slip wall, these crystallites are characterized by a continuous out-of-plane flux of particles that circulate and re-enter at the crystallite edges, thereby stabilizing them, while the crystallites are strictly two-dimensional at a plane where the tangential stress vanishes. These results are elucidated by deriving, using the boundary-domain integral formulation of Stokes flow, exact expressions for dissipative, long-ranged, many-body active forces and torques between them in respective boundary conditions.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}