Share
Introduction of a thesis based on googlecartographer 論文Real-Time Loop Closure in 2D LIDAR SLAMの解説スライド
{kind=link}
{kind=link}
![逐次SLAM • グリッドベースのスキャンマッチング 確率格子(grid)M(rZ×rZ→[pmin,pmax])を 確率phit とpmiss で更新 • Scan-to-Map(S2M)の非線形最小二乗問題 値を範囲(low,](https://files.speakerdeck.com/presentations/773ba86e3b944f42b7be01b114e387e7/slide_2.jpg){kind=link}
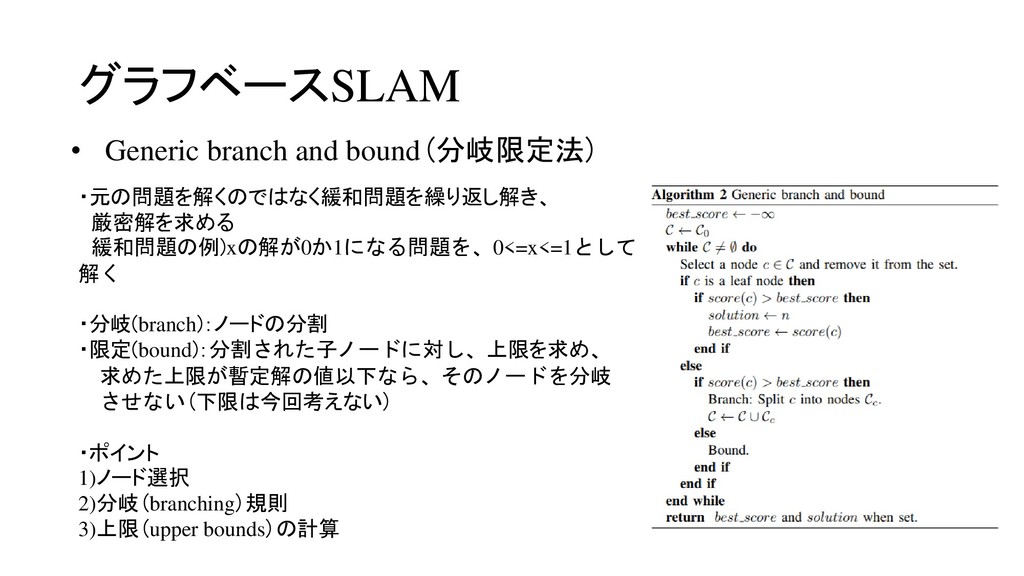
![グラフベースSLAM • Sparse Pose Adjustment(SPA)[1] - Levenberg-Marquardt(LM)法で更新が終わったサブマップ・ スキャンの姿勢間の制約からなるPose-Graphの最適化 - 制約の数はポーズ数に比例するだけなので、行列はスパース](https://files.speakerdeck.com/presentations/773ba86e3b944f42b7be01b114e387e7/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}